前言
在信息技术日益成为现代教育核心的今天,如何有效地实施和开展信息科技课程已成为教育工作者的重要任务。因此行空板信息科技实验盒应运而生,专为满足中小学信息科技课程标准设计,旨在为教师和学生提供一个功能全面、易于操作的学习工具。其高集成度和便利的收纳设计,使其成为大班教学的理想选择,帮助教师高效地开展信息技术课程,提升课堂教学效果。
行空板信息科技人工智能实验盒以行空板M10为核心,集成了摄像头、麦克风、小音响等多种常用组件,用户无需额外连接其他设备,即可完成从基础的传感器应用到高级的人工智能项目。丰富的输入、输出类传感器,结合行空板SIoT,能够搭建完整的物联网信息系统。同时,实验盒还提供了丰富的扩展接口,可实现更多功能的扩展。

目标
- 介绍行空板信息科技实验盒的主要组件及其功能,帮助用户熟悉各部分的使用方法。
- 指导用户进行基本的硬件连接和软件安装,以便顺利开启实验盒。
- 提供基础示例项目,帮助用户通过实际操作来熟悉实验盒的使用,从而掌握关键的技术概念和技能。
适用对象
- 中小学信息科技课程相关的教师及学生。
- 人工智能课程相关的教师及学生。
- 对开源硬件和机器人感兴趣的初学者及爱好者。
- 已经使用过行空板的用户。
本手册,将带您深入探索行空板信息科技人工智能实验盒M10的强大功能和多种应用场景。从简单的操作入手,到复杂的项目实施。接下来就让我们一起去开启这段充满挑战的科技之旅,共同探索无限的可能性!
一、行空板实验盒通用知识
1. 硬件介绍
1.1 主要特点
- 以行空板M10为核心,搭配摄像头、麦克风、小音响可实现各类人工智能项目。
- 集成丰富的输入、输出类传感器,结合行空板SIoT可搭建完整的物联网信息系统。
- 内置超声波、巡线、电机等模块,满足一台小车的基础功能。
- 提供丰富的扩展接口,支持更多功能的开发。
- 结合教材需求,能够完成过程与控制、物联网、AI等常见项目的实践。
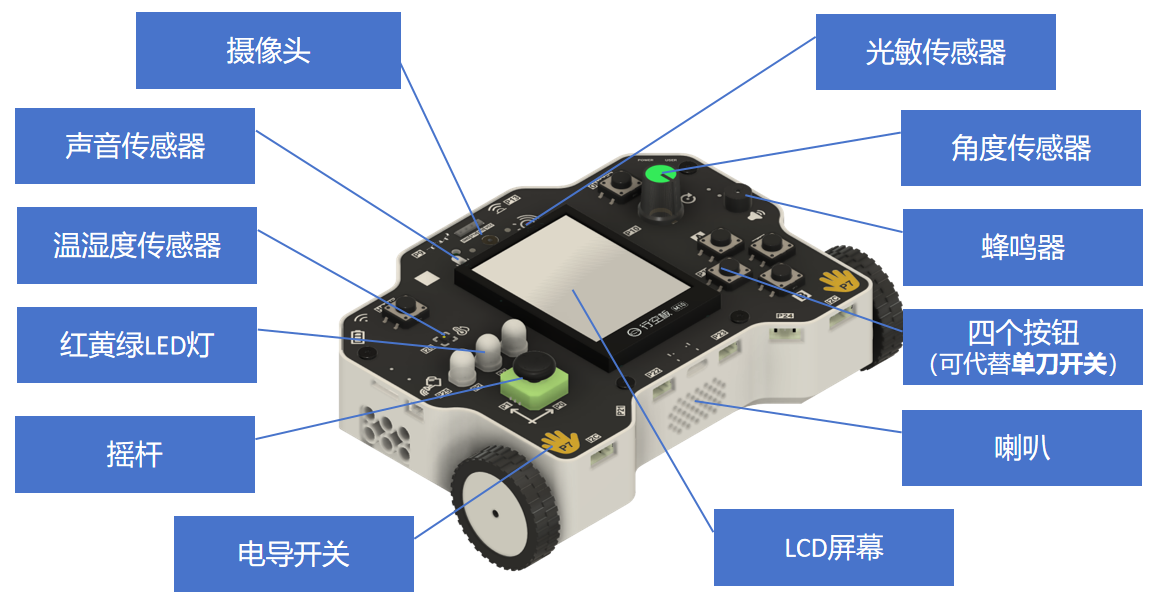
1.2 板载功能
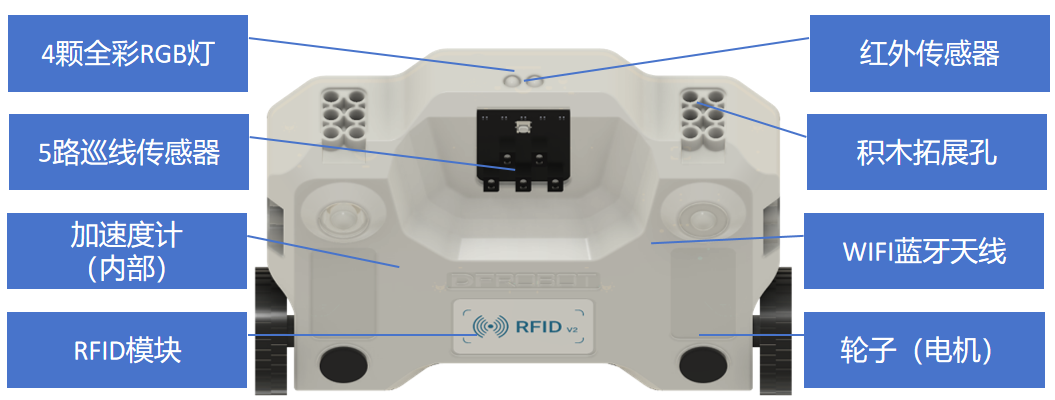

注:5路巡线传感器,电机,轮子,microSD卡接口,USB TYPE-A接口,SR04超声波传感器属于高配版中的功能。
如果你想拥有更多功能的实验盒,可以选择高配版,高配版的实验盒内置的超声波、巡线、电机等模块,满足一台小车的基础功能需求,点击行空板M10信息科技实验盒查看高配版详情。
1.3 详细功能说明
核心部分
行空板M10实验盒以行空板M10为核心,CPU、内存、蓝牙等核心参数,可以跳转到行空板M10 WIKI 了解核心部件。
传感器&执行器
| 功能 | 说明 |
|---|---|
| 屏幕 | 尺寸:2.8寸分辨率:240x320 显示颜色:彩色特性: 可触控 |
| 光线传感器 | 光敏三极管 |
| 六轴传感器 | 三轴加速度三轴陀螺仪 |
| 角度传感器 | 引脚:P10输出范围:0-4095旋转角度:300° |
| 摇杆 | X轴引脚:P0 Y轴引脚:P1输出范围:0-4095 |
| 温湿度传感器 | 温度:-40-85℃ 精度±0.3℃湿度:0-100%RH 精度±2%RH |
| 实体按键 | Home按键:长按进入菜单页面ON/OFF按键:长按可开启/关闭实验盒A按键(上按键):与行空板上A按键功能一样B按键(上按键):与行空板上B按键功能一样左按键:P11右按键:P12 |
| 电导开关 | 引脚:P7输出类型:高低电平 |
| 红外传感器 | 输出类型:高低电平检测距离:0~10cm |
| RFID模块 | 通信接口: I2CI2C地址:0x7c最大检测距离:不低于10mm |
| 摄像头&麦克风 | 摄像头: 200万像素;彩色最大 30 帧无拖影,最大分辨率1600x1200麦克风:最大输出值为100 |
| 红黄绿LED灯 | 引脚:红灯P2;黄灯P3;绿灯P4输出类型:高低电平红灯和黄灯支持PWM控制 |
| RGB LED灯 | 引脚:P9RGB灯 x 4亮度显示:0~255全彩:1600万色 |
| 喇叭 | 方形喇叭 |
| SR04超声波传感器(高配) | 型号:HC-SR04检测距离:2~400cm测量角度:约15度备注:该传感器可拆卸,需要用户自己安装。 |
| 5路巡线传感器(高配) | 探头数量:5路TTL信号输出:黑色高电平,白色低电平检测距离:1~2cm支持一键巡线校准 |
| 电机(高配) | 电机数量:2接口:M1,M2速度设置范围:0~1023 |
接口
| 功能 | 说明 |
|---|---|
| USB Type-C接口 | 用于CPU连接PC编程或主板供电 |
| USB TYPE-A接口(高配) | 用于外接USB外设,如U盘 |
| microSD卡接口(高配) | 用于扩展存储空间 |
| 3Pin I/O | P21~,P22~,P23~,P24备注:~表示该引脚可接模拟传感器 |
| 4Pin I2C | 独立2路I2C接口,不与板载I2C元件共用 |
指示灯
| 功能 | 说明 |
|---|---|
| 电量指示灯 | 状态:白色,紫色,红色白色表示满电,紫色表示还有一半的电,红色表示没电了。 |
| USER指示灯 | 状态:闪烁红色USER灯闪烁表示系统正常运行 |
| POWER指示灯 | 状态:红色电源灯,开机就显示红色 |
| 充电指示灯 | 状态:绿色接上充电线时一直亮绿色,充满电后熄灭 |
电源
| 功能 | 说明 |
|---|---|
| 供电 | 18650电池供电 |
| 工作电压 | 3.3V |
| 最大工作电流 | 2000mA |
1.4 引脚功能说明

1.5 尺寸
长x宽x高:160mmx120mmx33mm

1.6 行空板M10通用知识
实验盒上的主控使用的是行空板M10,连接方式、菜单操作、本地Wed主页,SMB文件共享、VNC屏幕共享、系统镜像烧录、编程软件介绍等,都与行空板M10的操作方式保持一致。详细的操作方法,可以查看行空板M10通用功能。
注意:操作过程中,会使用到Home按键,A、B按键,实验盒的Home按键及A、B按键参考下图的标注。

1.8 行空板M10实验盒版本说明
行空板M10实验盒镜像在行空板M10基础镜像上,结合行空板M10实验盒集成功能做了适配,所以实验盒镜像与行空板M10 镜像版本不同。
| 实验盒镜像版本 | 说明 |
|---|---|
| UNIHIKER V0.3.6 - box21 | 行空板M10实验盒第一版镜像版本 |
| UNIHIKER V0.4.1 - box02 | 基于行空板M10 V0.4.1版本镜像 调整了如下内容 |
固件下载
腾讯微云:
https://share.weiyun.com/NoF5O1h1
百度网盘:
链接: https://pan.baidu.com/s/1-LuGY9gyyN84FoVlDNHnZQ?pwd=afhg 提取码: afhg
行空板M10实验盒硬件版本上共计两个版本,对于核心功能有影响的主要有两个大的版本
硬件版本是配合课程来的所以按照配套课程使用,不影响教学。

二、编程平台
实验盒的主控使用的是行空板M10,而行空板M10自身作为一个单板计算机可以直接运行Python代码,同时默认开启了ssh服务及samba文件共享服务,因此可以用任意的文本编辑器编写代码,然后将代码传输到行空板即可运行。
初学者推荐使用Mind+对行空板进行编程,可以一键连接、文件管理、图形&代码两种方式编程。
有Python经验的用户可以按照个人习惯选择适合自己的编程方式,例如使用jupyter notebook、vscode、thonny,或使用Mind+进行编程。
有Linux开发板经验的用户可以查看行空板通用功能说明,按照按照个人习惯操作。
此处重点展示使用Mind+图形化编程,编写程序。
其他编程方式的教程,正在更新中……
1. 使用Mind+编程
- 下载Mind+支持行空板的版本(V1.8.3 RC3.1及以上版本)

- 打开Mind+:打开Mind+,并切换到Python模式,切换编程方式为图形化“模块”

- 添加行空板库:点击扩展,在“官方库”中选择行空板

-
添加实验盒用户库:点击扩展,在“用户库”的搜索栏中,选择实验盒用户库。输入用户库链接,选择实验盒用户库。
实验盒用户库链接:https://gitee.com/zhaoruiz/ext-unihiker-box

本文档中,涉及到的所有用户库
- 实验盒整体库:https://gitee.com/zhaoruiz/ext-unihiker-box
- 红外避障的库 https://gitee.com/chenqi1233/ext-infrared-sensor
- 温湿度:https://gitee.com/zhaoruiz/ext-aht20
- RFID: https://gitee.com/zhaoruiz/ext-rfid
2. 连接主控-行空板M10
2.1 本地连接
-
使用USB线,将电脑和实验盒连接。并长按实验盒上的开机键(长按3-5秒),等待实验盒开机成功。
-
实验盒开机成功后,在Mind+界面中,点击“连接远程终端”,选择10.1.2.3,连接行空板。
注意:10.1.2.3为USB线直连时的固定IP地址。

2.2 无线连接
-
使用USB线将实验盒与电脑连接,且实验盒保持为开机状态。
-
打开浏览器,在浏览器地址栏输入“10.1.2.3”,进入到行空板主页。

-
进入网络设置功能,点击“扫描”,扫描可用WiFi名称,输入对应的密码后,点击“连接”。当WiFi连接成功后,自动分配网络IP地址。
注意:电脑需要和行空板连接同一个WiFi。

- 在Mind+连接远程终端中,选择“手动输入”,在地址中输入分配的网络IP地址“192.168.0.34”,并点击“确定”。

- 连接成功后,“连接远程终端”自动变为连接的网络IP地址。

三、实验盒基础使用说明
1.传感器
1.1 角度传感器
| 积木 |  |
| 功能说明 | 读取板载角度传感器的值。当传感器顺时针转动时,返回的值会增大;逆时针转动时,值会减小。输出值的范围为 0 到 4095。 |
示例项目-01:在主控板上绘制一个矩形框,通过转动角度传感器填充矩形框。
示例程序:

示例效果:
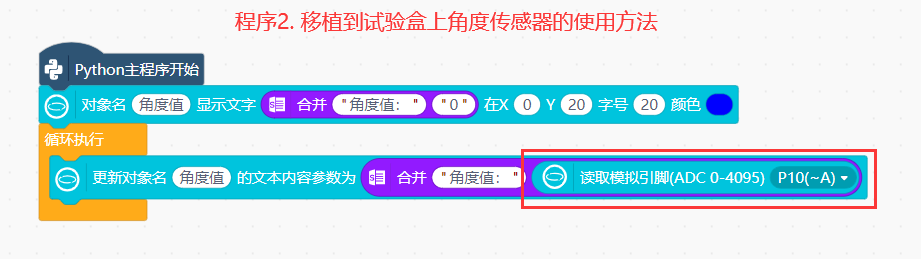
示例项目-02:裸板程序移植操作
你之前可能在行空板裸板上使用过外接角度传感器,现在需要将该程序移植到实验盒上。为了避免重新编写代码,你只需将程序中角度传感器的引脚更改为P10即可。
例如,你曾在行空板裸板的P21引脚上连接角度传感器,并将传感器的检测值显示在行空板的屏幕上。现在,你想将这个程序移植到实验盒上,同时保持与裸板相同的功能,而无需添加实验盒的库。你只需要按照以下步骤进行操作:将程序中的传感器引脚从P21改为P10,即可在实验盒上实现相同的功能。
示例程序:
| 硬件连接 | 程序示例 | 运行效果 | |
|---|---|---|---|
| 行空板M10-裸板 |  |
 |
 |
| 实验盒 | 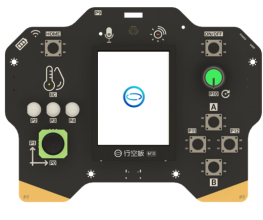 |
 |
 |
1.2 摇杆
| 积木 |  |
| 功能说明 | 读取摇杆上关于X轴和Y轴的值,摇杆位置对应的坐标如下图。 |
示例项目:在主控板上绘制一个小球,通过摇杆控制小球上下左右移动。
示例程序:

示例效果:

1.3 温湿度传感器
| 积木 |  |
| 功能说明 | 读取板载传感器温度数据与湿度数据。温度的单位为摄氏度(℃),湿度单位为%rh。 |
示例程序-01:将传感器检测到的温湿度数据,实时显示在主控板屏幕上。
示例程序:

示例效果:

注意:如果您之前使用过行空板完成了一些项目,现在想在原来项目的基础上,添加AHT20温湿度传感器的功能,并在实验盒上运行程序(保持原有程序不删除的情况下,还能使用实验盒的新功能),您只需要在用户库中,添加温湿度的功能库就好了。
温湿度库链接:https://gitee.com/zhaoruiz/ext-aht20
示例项目-02:之前你可能使用行空板M10做了一个环境数据监测项目,主要监测了光线、温度和湿度等数据,现在要在实验盒上,完成同样的功能。你可以将外接的温湿度传感器换成实验盒板载的温湿度传感器,只需要添加温湿度功能库就可以了,并对温湿度检测的程序指令进行替换。
示例程序:
| 硬件连接 | 温湿度库 | 程序示例 | 运行效果 | |
| 行空板M10-裸板 | 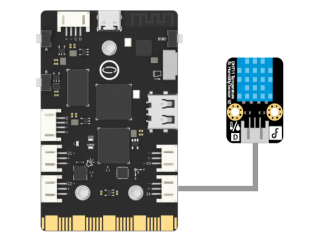 |
在pinpong库中添加DHT11传感器。 |  |
见视频1 |
| 实验盒 |  |
在用户库中输入AHT20温湿度库链接:https://gitee.com/zhaoruiz/ext-aht20 |  |
见视频2 |
示例效果:
视频1
视频2

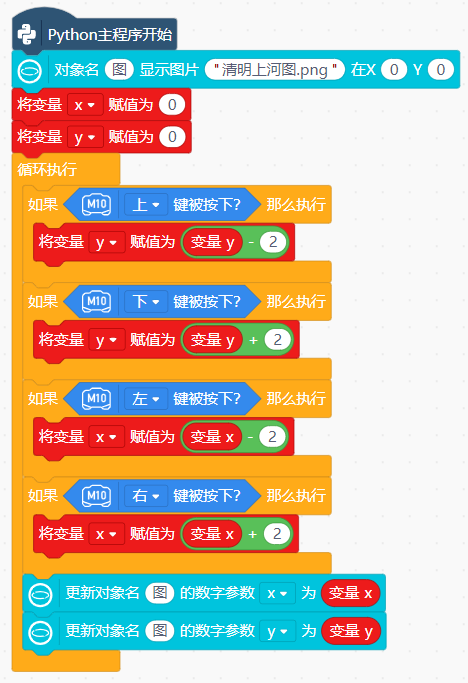
1.4 按键
| 积木 |  |
| 功能说明 | 该指令用于判断试验箱上板载的上(A)、下(B)、左(P11)、右(P12)按键,是否被按下。 |
示例项目:通过按下上、下、左、右按键,控制主控板屏幕上的图片上下左右移动。
示例程序:
示例效果:

1.5 电导开关
示例项目:当电导开关被导通时,主板屏幕上显示心形图案,否则,显示心碎图案。
示例程序:

示例效果:

1.6 红外传感器
| 积木 |  |
| 功能说明 | 该指令用于判断红外传感器是否检测到前方是否有障碍物。 |
示例项目:当红外传感器检测到物体时,在主控屏幕上显示提示文字和前方有障碍物的图片。
示例程序:

示例效果:

注意:如果您之前使用过行空板完成了一些项目,现在想在原来项目的基础上,添加红外传感器的功能,您只需要在用户库中,添加红外传感器的功能库就好了。
红外传感器库链接: https://gitee.com/chenqi1233/ext-infrared-sensor
示例项目-02:获取您之前利用行空板M10、人体红外传感器,制作了人体感应广告牌,现在想将该项目的程序移植到实验盒上,该怎么做呢?具体操作方法如下:
-
添加红外传感器的库。
-
将程序中获取P24引脚的值(人体红外传感器检测到行人),替换为红外探测引脚被触发指令,由于红外传感器是连接在实验盒的P13引脚,因此,需要在该指令中添加行空板引脚P13。
示例程序:
| 硬件连接 | 示例程序 | 效果展示 | |
|---|---|---|---|
| 行空板M10-裸板 | 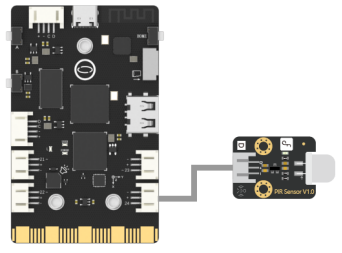 |
 |
见视频1 |
| 实验盒 | 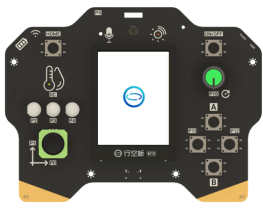 |
 |
见视频2 |
示例效果:
视频1

视频2
1.8 RFID射频模块
| 积木 |  |
| 功能说明 | 初始化RFID模块。 |
| 积木 |  |
| 功能说明 | 该指令用于向标签卡写入数据。注意:1. 白卡前4个数据块为只读区,不可写入数据。从第5个数据块开始,可以进行写入操作。2. 白卡的数据结构为每个数据块可存放4个字节数据,因此写入时,每个数据块只能写入4个字节。3. 圆形卡的所有数据块都是可读写操作的,并且每个数据块可以写入16个字节。 |
| 积木 |  |
| 功能说明 | 该指令用于从标签卡中,读取指定数据块的所有数据。 |
| 积木 |  |
| 功能说明 | 该指令用于从标签卡中,读取指定数据块指定指令字节的数据。 |
| 积木 |  |
| 功能说明 | 该指令用于读取标签卡的编号。 |
| 积木 |  |
| 功能说明 | 该指令用于判断检测到的标签编号,是否是我们填入的编号。 |
| 积木 |  |
| 功能说明 | 该指令用于判断在检测区是否检测到标签卡。 |
示例项目-01:
读取标签卡的UID编号,并将读取到的编号显示在行空板屏幕上。
示例程序:

示例效果:

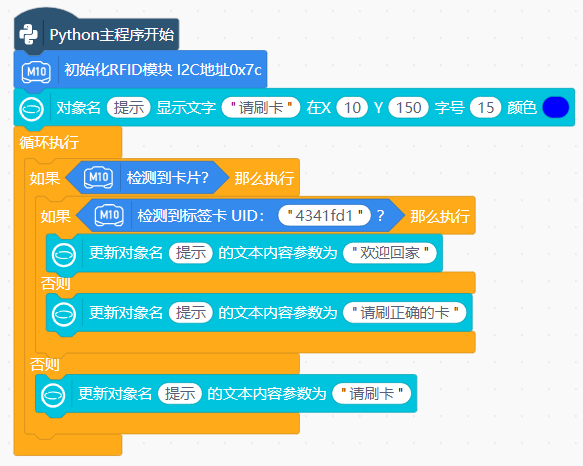
示例项目-01:当识别到白卡的编号(4341fd1)时,在主控屏上显示文字“欢迎回家”;当识别到其他编号的卡时,显示文字“请刷正确的卡”。
示例程序:
示例效果:
示例项目-03:通过RFID数据写入指令,向白卡的第5个数据块对应的4个字节中,依次写入数据10、20、30、40。然后使用读取RFID指令,读取该卡第5个数据块中的数据。
注意:进行读写操作时,需要将标签卡放到识别区域,然后再上传程序,否则会报错。
示例程序:

示例效果:
注意:
-
如果您之前在行空板上使用过NFC模块并完成了一些案例,现在想将程序运行在实验盒上,您只需在用户库中添加RFID功能库,并替换之前的NFC代码即可。
-
如果您想在原有的裸板程序中添加RFID功能,可以在不改变原有程序的情况下,直接引入RFID功能库,并将程序移植到实验盒上运行即可。
RFID库链接: https://gitee.com/zhaoruiz/ext-rfid
| 硬件连接 | 示例程序 | 示例效果 | |
|---|---|---|---|
| 行空板M10-裸板 |  |
 |
见视频1 |
| 实验盒 |  |
 |
见视频2 |
视频1

视频2

2. 执行器
2.1 红绿灯
| 积木 |  |
| 功能说明 | 该指令用于控制板载的红(P2)、黄(P3)、绿(P4)三个LED灯亮或灭。 |
| 积木 |  |
| 功能说明 | 该指令用于设置板载的红灯、黄灯的亮度。注意:因为绿灯连接在P4引脚上,该引脚是数字引脚,因此不可以控制绿的亮度。 |
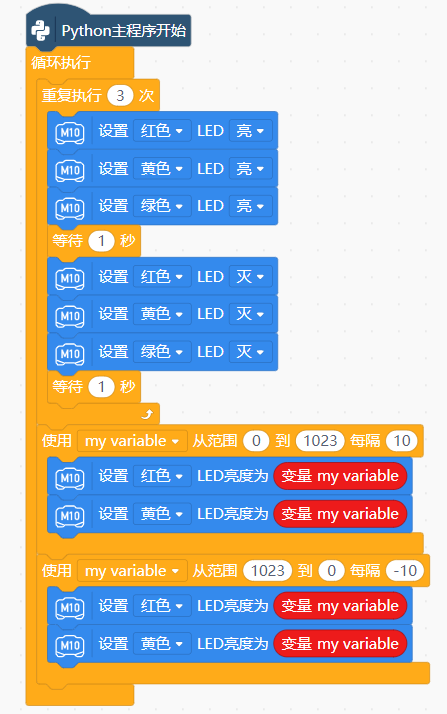
示例项目:控制红、黄、绿三个灯执行三次亮灭后,再控制红灯和黄色的亮度由亮—逐渐灭,由灭—逐渐亮。
示例程序:
示例效果:

2.2 RGB LED灯
| 积木 |  |
| 功能说明 | 该指令用于初始化连接在P9引脚上的RGB灯。 |
| 积木 |  |
| 功能说明 | 该指令用于设置RGB灯的亮度。最低值为:0,RGB灯灭;最大值为:255,RGB灯最亮状态。 |
| 积木 |  |
| 功能说明 | 该指令用于控制RGB灯全部熄灭。 |
| 积木 |  |
| 功能说明 | 该指令用于设置指定的RGB LED灯的显示颜色。一共有4个RGB灯,灯的编号从0-3。 |
| 积木 |  |
| 功能说明 | 该指令用于设置指定范围内的RGB LED灯显示颜色。 |
| 积木 |  |
| 功能说明 | 该指令用于将指定范围内的 RGB LED 灯设置为彩虹颜色效果 |
| 积木 |  |
| 功能说明 | 该指令用于将所有 RGB LED 灯的颜色向前移动指定单位的位置。 |
| 积木 |  |
| 功能说明 | 该指令用于将所有RGB LED灯的颜色进行循环的旋转操作。颜色会根据指定的单位进行旋转。 |
| 积木 |  |
| 功能说明 | 该指令用于通过RGB三原色的值,控制RGB ELD的灯颜色显示。每个颜色的值为0-255。 |
示例项目:分别设置4个RGB LED灯显示红色、黄色、绿色、蓝色,然后通过角度传感器控制RGB LED灯的亮度。
示例程序:
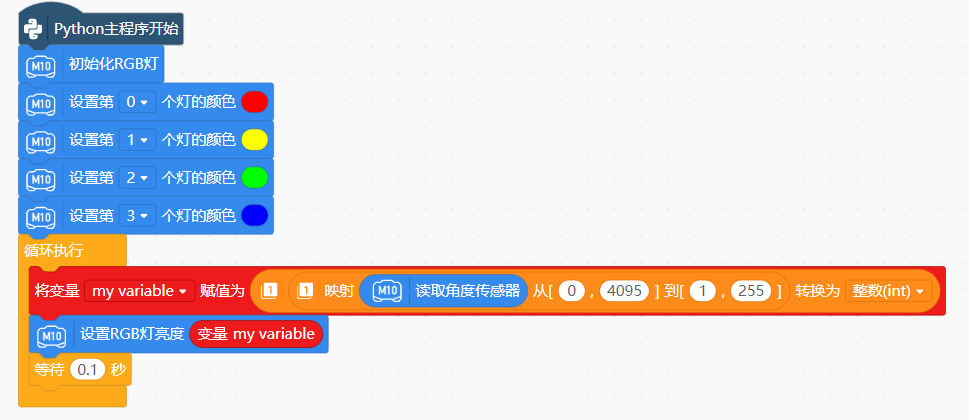
示例效果:

四、OpenCV常用积木使用说明
由于OpenCV涉及到的积木比较多,因此,我们先通过项目来了解一下使用OpenCV积木可以做什么之后,再去学习每条积木是什么意思。
示例项目-01:在行空板屏幕上创建一个视频显示窗口,然后将摄像头检测到画面实时显示在行空板屏幕上。按下实验盒上的A按键,关闭摄像头并将行空板上的显示窗口销毁。
示例程序:

示例效果:

示例项目-02:通过摄像头检测人脸,然后识别到人脸时,使用红色矩形框,将人脸框选出来。最后,将实时的画面显示在行空板屏幕上。
示例程序:

示例效果:

1. 基础操作
| 积木 |  |
| 功能说明 | 从文件“Mind+.png”中加载图像,并保留所有原始的细节,包括透明度部分。 |
| 积木 |  |
| 功能说明 | 显示图像 img。窗口的标题是 "Mind+'s Windows"。 |
| 积木 |  |
| 功能说明 | 等待 20 毫秒,检查是否按下了 ESC(27) 键。如果按下了 ESC 键,表达式的结果为 True。这通常用于在图像窗口中实现按键退出功能。 |
| 积木 |  |
| 功能说明 | 用于检测具体是哪个按键。 |
2. 窗口显示
| 积木 |  |
| 功能说明 | 创建一个名为 "Mind+'s Windows" 的窗口。 |
| 积木 |  |
| 功能说明 | 将名为 "Mind+'s Windows" 的窗口设置为全屏模式。 |
| 积木 |  |
| 功能说明 | 将名为 "Mind+'s Windows" 的窗口移动到屏幕上的指定位置。 |
| 积木 |  |
| 功能说明 | 将名为 "Mind+'s Windows" 的窗口的大小调整为指定的宽度和高度。 |
| 积木 |  |
| 功能说明 | 关闭并销毁名为 "Mind+'s Windows" 的窗口。 |
| 积木 |  |
| 功能说明 | 关闭所有由 OpenCV 创建的窗口。它会销毁所有打开的窗口,释放相关资源。 |
| 积木 |  |
| 功能说明 | 打开一个窗口,然后在图像上选择一个或多个矩形区域,然后将这些区域的位置和大小记录下来。 |
3. 图片属性
| 积木 |  |
| 功能说明 | 用于获取图像维度属性的属性,通常返回一个包含图像高度、宽度和通道数的元组。 |
| 积木 |  |
| 功能说明 | 用于获取图像总像素数的属性。具体来说,它返回图像中所有像素的总数,计算方法是图像的宽度 × 高度 × 通道数。 |
| 积木 |  |
| 功能说明 | 用于查看图像数组数据类型的属性,它返回图像中每个像素值的数值类型。 |
| 积木 |  |
| 功能说明 | 用于调整图像大小,并将调节好的图像存储在新对象中。 |
| 积木 |  |
| 功能说明 | 使用切片操作从原图中提取了一部分图像。50-100 表示你选取图像的列范围(宽度方向)从第 50 列到第 100 列(不包括第 100 列),裁剪出一个宽度为 50 像素的垂直区域。 |
| 积木 |  |
| 功能说明 | 复制图像,并将图像存储到新的对象中,相当于创建一个图像内容相同的副本。这样做的好处是,如果你需要对图像进行处理,但不想改变原图,可以先复制一份再操作。 |
| 积木 |  |
| 功能说明 | 用于对图像进行旋转操作。 |
| 积木 |  |
| 功能说明 | 将图像保存到指定的文件名中。 |
| 积木 |  |
| 功能说明 | 将图像编码成指定的文件格式(如 PNG),并将其保存在内存中,而不是直接保存到磁盘上。 |
| 积木 |  |
| 功能说明 | 这行代码是将从内存缓冲区buff中解码出的图像数据重新加载为一个图像对象。 |
4. 视频操作
| 积木 |  |
| 功能说明 | 创建一个用于捕获视频的对象。 |
| 积木 |  |
| 功能说明 | 用于打开摄像头设备。 |
| 积木 |  |
| 功能说明 | 用于调整摄像头捕获视频的帧宽度和高度。 |
| 积木 |  |
| 功能说明 | 用于从视频文件中打开视频文件,读取视频帧。 |
| 积木 |  |
| 功能说明 | 用于检查摄像头是否成功打开。当摄像头打开成功后,再进行读取帧、处理等操作,避免程序因无法打开设备而崩溃。 |
| 积木 |  |
| 功能说明 | 用于释放 cv2.VideoCapture 对象所占用的资源。这个方法在你完成对视频捕获的使用后调用,以确保摄像头或视频文件被正确关闭,并释放占用的系统资源。 |
| 积木 |  |
| 功能说明 | 用于从视频源中抓取下一帧图像。 |
| 积木 |  |
| 功能说明 | 从视频流中读取一帧图像,并返回该帧图像及其状态。ret: 这是一个布尔值,表示帧是否成功读取。如果读取成功,ret 为 True;如果失败(如到达视频末尾),ret 为 False。 |
| 积木 |  |
| 功能说明 | 获取视频流处理中缓冲区的大小、当前视频播放的位置、当前视频宽度、高度、帧率、帧数,以便根据需要进行优化配置。 |
| 积木 |  |
| 功能说明 | 设置视频流缓冲区的大小、当前视频播放的位置、当前视频宽度、高度、帧率、帧数。注意:这些参数越小,处理效率越高,对应的视频质量,流畅度、清晰度也会降低,可以根据实际场景修改。缓冲区的大小:缓冲区的大小越小,意味着保存的帧数越少,通常用于实时视频处理。当前视频的播放位置:表示当前视频播放在那里,通常越小表示视频刚开始。当前视频的宽度/高度:表示每一帧图像的分辨率,越小表示图像尺寸越小,文件体积也更小。当前视频帧率:帧率表示每秒显示多少帧,越小表示视频播放流畅度越差。当前视频帧数:视频的总帧数,表示视频的总长度,越小表示视频更短。 |
5. 绘图工具
| 积木 |  |
| 功能说明 | 用于在图像上绘制文本,可以设置文本的坐标、颜色、字体大小和线宽。 |
| 积木 |  |
| 功能说明 | 用于在图像上绘制带箭头的直线,可以设置线条的开始点/结束点坐标,也可以设置线条的颜色、粗细。线条的类型:选填充线、4连线、8连线、抗锯齿线。 |
| 积木 |  |
| 功能说明 | 用于在图像上绘制圆形。线条的类型:选填充线、4连线、8连线、抗锯齿线。 |
| 积木 |  |
| 功能说明 | 用于裁剪线段,使其只保留在指定矩形区域内的部分。(x1, y1, x2, y2):定义裁剪区域的矩形,由其左上角的坐标 (x1, y1) 和右下角的坐标 (x2, y2) 决定。这是一个矩形框。(startX, startY):线段的起始点坐标。(endX, endY):线段的终点坐标。ret: 一个布尔值,如果裁剪后的线段有部分在矩形区域内,它将返回True,否则返回 False。p1: 裁剪后的线段的新起点坐标。如果线段与矩形相交,则返回这个相交点,否则返回原始起点。p2: 裁剪后的线段的新终点坐标。如果线段与矩形相交,则返回这个相交点,否则返回原始终点。 |
| 积木 |  |
| 功能说明 | 用于在图像上绘制一个标记,可以设置标记的位置、颜色、类型、粗细、大小。**标记类型:**十字线标记形状、x准线标记形状、星形标记形状、菱形标记形状、方形标记形状、向上指向的三角形标记形状、向下指向的三角形标记形状。 |
| 积木 |  |
| 功能说明 | 用于在图像上绘制一个椭圆,可以设置椭圆的起始角度、结束角度、颜色 、粗细、线型。**(x, y):椭圆的中心位置坐标。(longAxisLength, minorAxisLength):**椭圆的长轴和短轴的长度。**角度:**椭圆的旋转角度(逆时针方向,单位为度)。 |
| 积木 |  |
| 功能说明 | 用于在图像上根据起始点和结束点,绘制一条直线。 |
| 积木 |  |
| 功能说明 | 用于在图像上根据首部顶点、尾部顶点绘制一个矩形。 |
| 积木 |  |
| 功能说明 | 使用不同的方法在图像上添加边框。例如,上下左右后面的数值为10,是设置对用边框的宽度为10像素。复刻法(cv2.BORDER_REPLICATE): **- 说明:用原始图像的边缘像素来填充边框区域。边框的像素值是原始图像边缘像素的重复。- 效果:边框区域的像素值与原始图像边缘像素相同。例如,原始图像的右边缘像素会重复到右边框区域。反射法(cv2.BORDER_REFLECT):- 说明:用原始图像的边缘像素进行镜像反射来填充边框区域。边框区域的像素值是原始图像边缘像素的镜像反射。- 效果:边框区域的像素值是原始图像边缘的镜像。例如,原始图像的右边缘像素会在边框中反射过来。反射法101(cv2.BORDER_REFLECT_101):- 说明:类似于反射法,但边框区域的反射略过了原始图像的最外层像素,以避免重复。- 效果:边框区域的像素值是原始图像边缘的镜像反射,但不包括最外侧的像素。例如,反射边框区域将跳过原始图像的最外侧像素进行填充。外包装法(cv2.BORDER_WRAP):- 说明:用原始图像的对侧像素来填充边框区域。即边框的像素值来自于与当前边框区域相对的图像边缘像素。- 效果:边框区域的像素是从原始图像的相对位置处取得的,就像图像被“包装”起来一样。例如,左边缘的像素会从右边缘的像素中填充。常量法(cv2.BORDER_CONSTANT):- 说明:用用户指定的常量值填充边框区域。可以指定边框的颜色或灰度值。- 效果:**边框区域被填充为用户指定的颜色或值。例如,边框区域的所有像素将设置为指定的常量值,比如纯黑色、白色或任意其他颜色。 |
6. 图片转换
| 积木 |  |
| 功能说明 | 用于将图像进行不同色彩空间转换。 |
| 积木 |  |
| 功能说明 | 用于使用不同的算法对图像进行自适应阈值处理。自适应阈值处理是一种图像二值化的方法,根据图像的局部特性 确定阈值,适用于 光照不均匀的图像。**邻域大小:**阈值计算的邻域大小,通常为奇数。3表示3x3的邻域。**常数:**常数值,从计算得到的阈值中减去的常数。常数值0表示没有额外的调整。1. 平均值算法(Mean Algorithm)计算: 对每个像素点所在的邻域区域,计算该区域的像素值的平均值,然后用这个平均值减去一个常数作为阈值。公式: 阈值 = 邻域平均值 - 常数特点:- 使用邻域内的所有像素的平均值来计算阈值。- 所有邻域像素的权重是相等的。- 适用于光照变化较大的图像,但在边缘和细节部分可能效果不如高斯均值算法平滑。2. 高斯均值算法(Gaussian Mean Algorithm)计算: 对每个像素点所在的邻域区域,计算该区域的加权平均值(高斯加权),然后用这个加权平均值减去一个常数作为阈值。公式: 阈值 = 邻域加权平均值 - 常数特点:- 使用高斯权重来计算邻域内的加权平均值,这意味着邻域中心的像素点对阈值计算的贡献更大,而边缘像素点的贡献较小。- 这种方法可以更好地处理光照变化和噪声,尤其是在图像的边缘和细节部分表现更平滑。- 高斯加权使得阈值计算对中心区域的像素更敏感,从而改善了图像的细节保留。 |
| 积木 |  |
| 功能说明 | 用于通过掩码,计算前景像素到最近背景像素的直线距离(也称曼哈顿距离)。前景像素也称非零像素,背景像素也称零像素。**注意:**非零像素与零像素分别是指图像经过二值化处理后的白色图像(非零)和黑色图像(零)。距离算法:- **曼哈顿距离:**只能沿着水平和垂直方向走,不能走斜线,也称街区距离。- **欧几里得距离:**最短的直线距离,不能拐弯。- 切比雪夫距离:既可以水平走,也可以垂直走,还可以斜着走。 |
| 积木 |  |
| 功能说明 | 通过制定的阈值范围,对图像进行二值化处理,将图像分成两部分:前景和背景。 |
| 积木 |  |
| 功能说明 | 对图像进行高斯模糊平滑处理,这是一种常用的图像平滑技术,用于减少图像噪声和细节。 |
| 积木 |  |
| 功能说明 | 对图像进行边缘检测。**阈值1:**又称低阈值,它是用于确定像素是否可能是边缘的一部分,表示边缘强度的下限。低于此阈值的像素不会认为是边缘的一部分,但如果像素的强度高于此阈值且连接到其他强边缘像素,则可能被认为是边缘。**阈值2:**又称高阈值,它是用于确定像素是否可能是边缘的一部分,表示边缘强度的上限。只有像素强度高于此阈值的像素会被认为是边缘。如果某像素的强度低于此阈值,则不会被认为是边缘。 |
| 积木 |  |
| 功能说明 | 查找出图像的外轮廓点,并将所有的点保存。 |
| 积木 |  |
| 功能说明 | 在图像上绘制轮廓线,并将绘制好的轮廓线和图像进行保存。 |
7. 对象检测
| 积木 |  |
| 功能说明 | 级联分类器是OpenCV提供的一个类,用于加载和使用预训练。是一种基于Haar特征的对象检测方法,通常用于面部、眼睛、行人等检测。 |
| 积木 |  |
| 功能说明 | 加载级联分类器中的模型文件。 |
| 积木 |  |
| 功能说明 | 判断级联分类器是否加载成功。 |
| 积木 |  |
| 功能说明 | 用于在图像中检测对象。**缩放比例:**图像金字塔中每次缩放的比例。值越大,检测速度越快,但是可能漏掉一些对象。**相邻个数:**矩形框周围需要的邻近矩形框的最小数量。值越高,检测结果越可靠,但可能会漏掉一些对象。 |
五、综合案例
案例1-雷霆战机
项目描述
通过摇杆的 X 轴控制战机在屏幕上左右移动,并通过按下 A 按键(上按键)发射子弹。敌机会随机生成在屏幕上,当子弹击中敌机时,敌机会显示爆炸效果。
示例程序

运行效果
案例2-自动门禁系统
项目描述
在日常生活中,出入门禁系统广泛应用于学校、社区和公司。现在我们使用实验盒和舵机来设计一个简易的自动刷卡门禁系统。当卡片靠近识别区域时,舵机转动到100度(模拟开门);等待5秒后,舵机转动到10度(模拟关门)。
硬件准备
- 实验盒 x1
- 舵机 x1
- RFID卡 x1
硬件连接
将舵机连接在实验盒的P21引脚。

程序示例

运行效果

案例3-智能考勤系统
项目描述
人脸识别技术已经逐渐应用于各种场景,如公司考勤、学校签到、门禁管理等。下面我们使用实验盒,设计一款人脸识别考勤系统。系统使用摄像头捕捉人脸,当识别到已登记的人员时,自动完成签到打卡。
软件准备
需要在用户库中,搜索并添加人脸识别库。

示例程序
程序1:采集并训练人脸
**注意:**要采集多个人脸时,需要修改程序中的人脸编号。

程序2:识别人脸
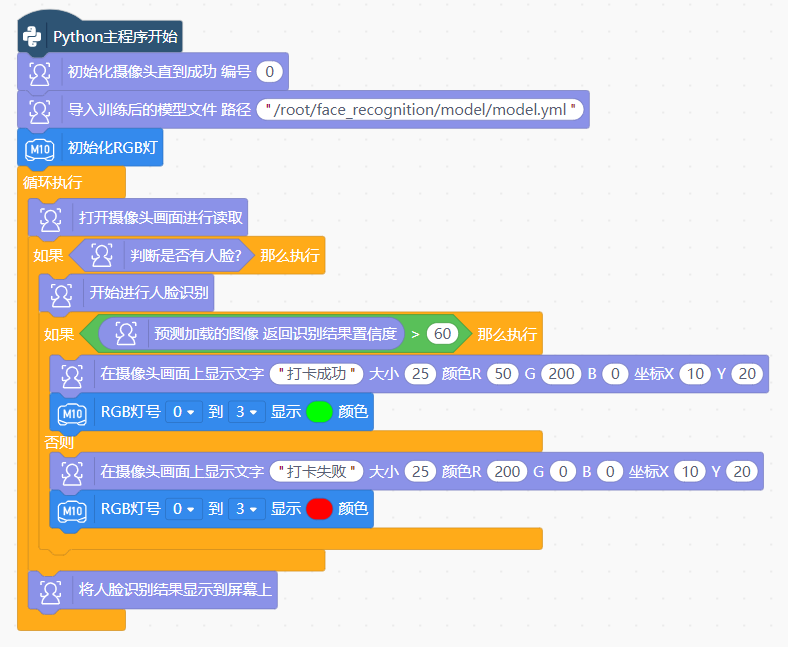
运行效果
识别到采集过的人脸时,RGB灯显示绿色,屏幕上显示打卡成功;识别到未采集过的人脸时,RGB灯显示红色,屏幕上显示打卡失败。

案例4-IoT室内环境监测仪
项目描述:
实验盒主控屏幕上实时显示图标与环境数据,并且将环境数据按照各自的主题发送到SIoT服务器。
示例程序

运行效果
实验盒上的传感器每5秒钟采集一次环境数据,并将数据发送到SIoT服务器平台。同时,主控屏幕也会实时同步最新数据。

案例5-智能园艺助手
项目描述
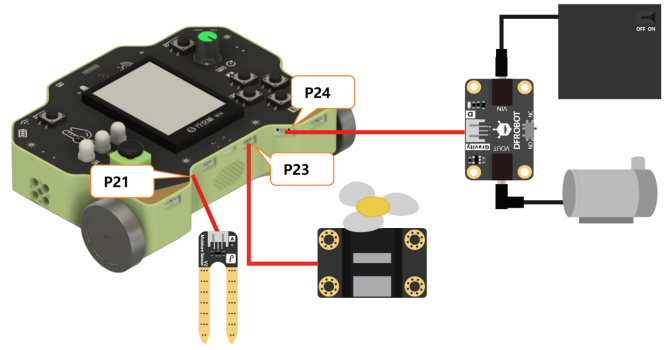
智能园艺助手是一个基于传感器技术的自动化园艺管理系统,旨在提高植物的生长环境,简化日常园艺维护。该系统具备温度监测和土壤湿度检测功能,能够根据实时数据的来控制灌溉和通风设备。系统分为自动控制和手动控制两种模式,确保用户在不同情况下都能灵活管理植物的生长。
**手动控制:**用户可以通过屏幕上的按钮手动控制浇水和风扇的开关,方便灵活地管理植物需求。
**自动控制:**当土壤湿度低于预设阈值时,系统自动启动水泵进行灌溉;当环境温度大于预设阈值时,系统自动启动风扇进行通风。
硬件准备
- 行空板实验盒 x1
- 土壤湿度传感器 x1
- 风扇模块 x1
- 水泵 x1
- 简易继电器 x1
- 电池盒 x1
硬件连接
将土壤湿度传感器连接到P21引脚,风扇连接到P23引脚,继电器连接到P24引脚,
示例程序

运行效果
更多综合案例正在更新中……