简介
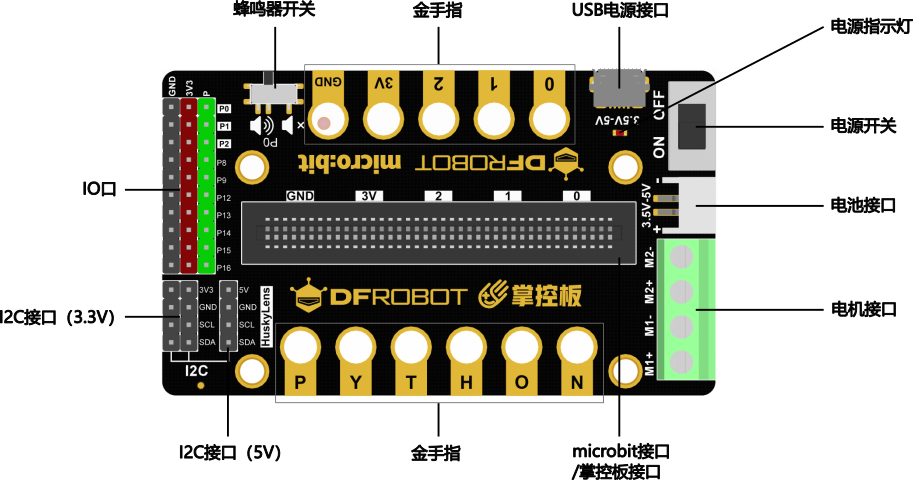
本扩展板能完全兼容micro:bit和掌控板和两种主板。正面插入掌控,反面插入micro:bit。引出10路数字/模拟3Pin口,三路IIC口;板载两路电机驱动,且不占用额外引脚;板载PH2.0及microUSB两种供电口,既可以通过usb线也可以通过电池盒或者锂电池供电,供电电压3.5-5V,板载开关,可以开关外接供电电源;板载一个高品质蜂鸣器,且带有开关控制,可以随时关闭蜂鸣器;引出了9个鳄鱼夹接口;分别兼容掌控的触控金手指和micro:bit金手指。扩展板兼容乐高尺寸孔位,可以与乐高进行拼插结合
技术规格
- 外接3节5号干电池(3.5V~5V)或3.7V锂电池, PH2.0接口
- USB接口外接供电(3.5V~5V) MicroUSB接口
- 掌控板电源供电(注:由于掌控板IO口驱动能力有限,使用掌控板供电,无法驱动大功率外设,如需使用电机等设备,请使用外接电池或者外接USB口供电)
- IO口:P0 P1 P2 P8 P9 P12 P13 P14 P15 P16(注:掌控板不支持使用P12口)
- I2C接口 ×3
- 引脚金手指 :0 1 2 3V GND
- 触摸金手指×5:P Y T H O N (掌控独有)
- microbit蜂鸣器×1 P0口 (microbit有用,掌控模式下,请关闭蜂鸣器开关,避免占用P0口)
- 蜂鸣器开关×1
- 电机驱动×2
- 金手指孔径:4.8mm兼容乐高
- 金手指孔距:8mm兼容乐高
- 底部黑色亚克力保护
- 尺寸:80*47mm
功能图例
尺寸图
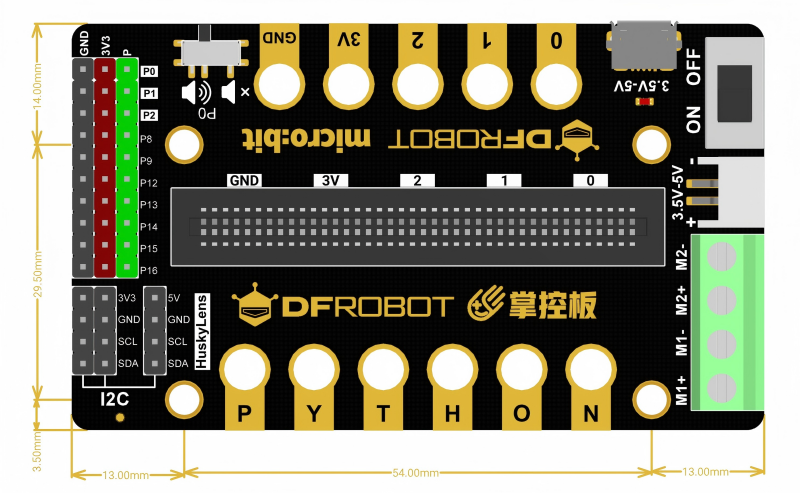
物料尺寸
- PCB尺寸:80mm*47mm
- 安装孔间距:54mm*29.5mm
- 安装孔直径:3mm
使用方法及说明
供电方式
-
主板直接供电: 采用主板的USB或者电源口供电,此时,可以使用扩展板的各种扩展口及蜂鸣器。因主板驱动电流有限,此模式下无法使用电机驱动。
-
USB供电口供电: 使用电脑USB口供电或者充电宝,或者手机充电头供电。接口为microUSB。此模式下,扩展板的所有功能均可使用。
-
外接电池盒供电:外接PH2.0接口输入电压为3.5~5V,使用PH2.0接口的3节干电池盒或者3.7V锂电池,均可。此模式下,扩展板的所有功能均可使用。
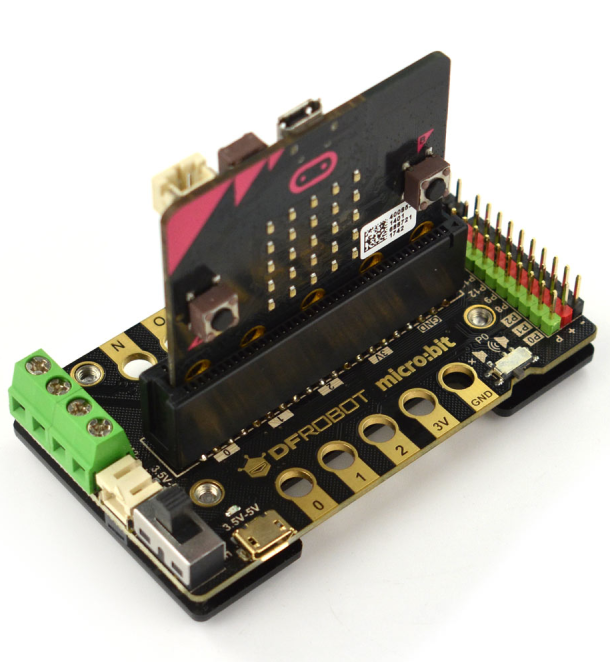
掌控板使用方法
掌控板的OLED屏幕的那一面,对着掌控的图标那个方向插入,如图所示:

此时,扩展板支持的功能如下:
-
所有的IO口
-
2路电机驱动
-
P Y T H O N 触摸金手指
-
0 1 2 3V GND 金手指
-
USB供电和PH2.0外接供电口供电及电源开关。
注:
1、掌控模式下,不支持扩展板上的蜂鸣器,使用掌控板的时候,请将蜂鸣器关闭,此时,可正常使用P0口。
2、触摸金手指的原理主要基于电容变化,当我们的手指触摸到金手指的时候,由于人体自身也带有电荷,会改变金手指表面的电容值。而这种电容值会受硬件设计、不同人的手指大小,皮肤湿度,甚至触摸的力度和角度等影响而有所不同。因此,在使用扩展板上的触摸金手指功能时,需要先将主控插入扩展板读取触摸值,并根据你想实现的效果,在程序里使用下面的积木设置对应的触摸阈值。

micro:bit板使用方法
microbit主板的LED点阵的那一面,对着microbit字样的那个方向插入,如图所示:
此时,扩展板支持的功能如下:
-
所有的IO口
-
2路电机驱动
-
0 1 2 3V GND 金手指
-
USB供电和PH2.0外接供电口供电及电源开关。
-
蜂鸣器及蜂鸣器开关。
注:
1、microbit下不支持 P Y T H O N这6个触摸金手指。
2、蜂鸣器占用的P0口,如果要正常使用金手指P0,请将蜂鸣器关闭。
行空板使用方法
行空板的屏幕的那一面,对着microbit字样的那个方向插入,如图所示:

此时,扩展板支持的功能如下:
- 所有的IO口
- 2路电机驱动
- 0 1 2 3V GND 金手指
- USB供电和PH2.0外接供电口供电及电源开关。
- 蜂鸣器及蜂鸣器开关。
注:
1、 行空板下不支持 P Y T H O N这6个触摸金手指。 蜂鸣器占用的P0口,如果要正常使用金手指P0,请将蜂鸣器关闭。
2、此扩展板在对行空板进行扩展时,行空板与扩展板都需要单独供电
使用例程
Mind+ 上传模式使用掌控板驱动电机
1、下载及安装软件,注意要使用Mind+V1.5.5及以上版本。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程
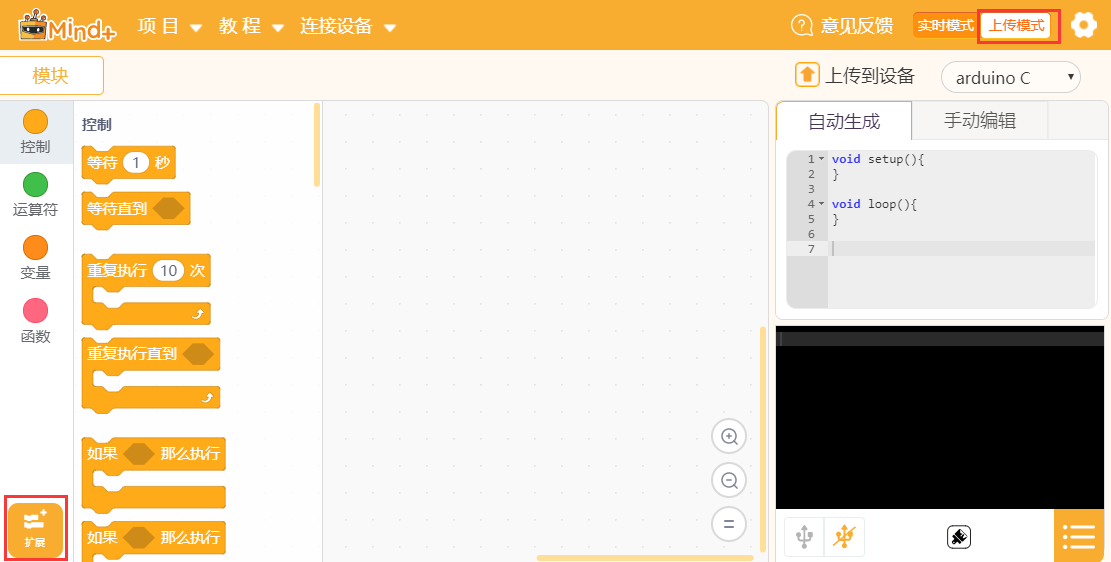
3、“扩展”中先选择“主控板”中的“掌控板”,如果提示需要安装编译器,请点击“安装”等待安装完成。 再次打开“扩展库”,点击“扩展板”。详细教程:Mind+基础wiki教程-加载扩展库流程

4、进行编程。
5、菜单“连接设备”,“上传到设备”
示例:
以下程序运行结果:两个电机转速分别为200转和100转,正转2秒,反转2秒,停止2秒,一直循环。

《掌控板入门系列教程》 — DFRobot官方出品
0. 教程介绍及准备
14. 【Mind+】掌控板入门教程14 智能物联手表(part1)
15. 【Mind+】掌控板入门教程14 智能物联手表(Part2)
16. 【Mind+】掌控板入门教程14 智能物联手表(Part3)
makecode下使用电机驱动(仅micro:bit)
makecode在线编程地址:https://makecode.microbit.org
请复制库链接地址后粘贴到makecode扩展中并搜索:https://github.com/DFRobot/pxt-micro-IOBOX
示例:
以下程序运行结果:两个电机转速分别为200转和100转,正转2秒,反转2秒,停止2秒,一直循环。

Mind+ Python模式使用行空板驱动电机
Mind+Python模式为完整Python编程,因此需要能运行完整Python的主控板,此处以行空板为例说明
1、下载及安装官网最新软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、切换到“Python模式”。“扩展”中选择“官方库”中的“行空板”和“pinpong库”中的”pinpong初始化“和“micro:bit&掌控扩展板”。切换模式和加载库的详细操作链接
3、进行编程
4、连接行空板,程序点击运行后,可在终端查看数据。行空板官方文档-行空板快速上手教程 (unihiker.com)
图形化编程
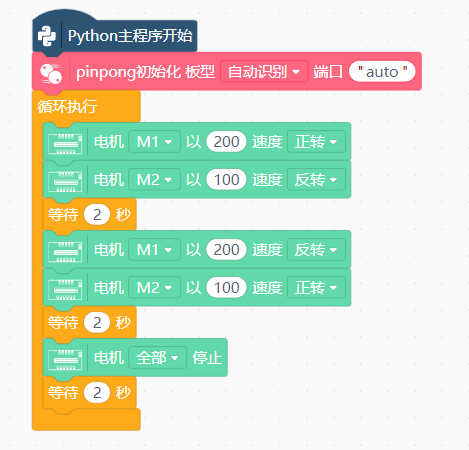
代码编程
以pinpong库为例,行空板官方文档-行空板快速上手教程 (unihiker.com)
# -*- coding: UTF-8 -*-
# MindPlus
# Python
from pinpong.libs.dfrobot_dualuse_shield import DFRobot_DualuseShield
from pinpong.board import Board
import time
Board().begin()
p_mbt0014_motor = DFRobot_DualuseShield()
while True:
p_mbt0014_motor.run(p_mbt0014_motor.M1, p_mbt0014_motor.CW, 200)
p_mbt0014_motor.run(p_mbt0014_motor.M2, p_mbt0014_motor.CCW, 100)
time.sleep(2)
p_mbt0014_motor.run(p_mbt0014_motor.M1, p_mbt0014_motor.CCW, 200)
p_mbt0014_motor.run(p_mbt0014_motor.M2, p_mbt0014_motor.CW, 100)
time.sleep(2)
p_mbt0014_motor.stop(p_mbt0014_motor.ALL)
time.sleep(2)
常见问题
***Q1:***程序没有问题,为什么电机不转?
A:请检查扩展板是否有供电。
***Q2:***裸板触摸"PYTHON"按键的时候正常能触发,但是加上扩展板之后触摸按键就失灵了
A:请在程序最开始设置使用“设置按键触摸阈值”这个积木进行触摸阈值的设置,可以适当低一些进行测试。
加上扩展板之后可能触摸产生的电压会比裸板略低。
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
