概述
Devastator Tank Mobile Platform 履带机器人是DFRobot 研制的机器人实验平台,该平台不但可以使用当前流行的Arduino控制器,也可以使用Raspberry pi等其他控制器控制。
机身采用高强度铝合金材料,高速电机加优质塑料履带,运动灵活快速,性能卓越的悬挂系统能让机器人轻松的翻越障碍物,适应大部分不规则场地。
履带机器人平台机身设计多种安装孔,兼容各种传感器、舵机、云台和主控板控制器安装(例如Romeo控制器、Raspberry Pi控制器),非常适合机器人比赛以及其相关研究项目。
技术规格
电压输入:3-8V DC
驱动轮直径 : 43mm
最大行驶速度 : 36cm/s
电机参数:https://www.dfrobot.com.cn/goods-362.html
尺寸:225*220*108
重量:780g
硬件安�
材料清单
履带移动平台 一套
Bluno Romeo控制器 一块
平台搭建
具体安装过程请参考履带机器人[安装手册]
硬件组�
电机焊线

焊好就是这样的啦

安装电池盒

焊接开关

安装开关

安装主控板及电机接线

成品

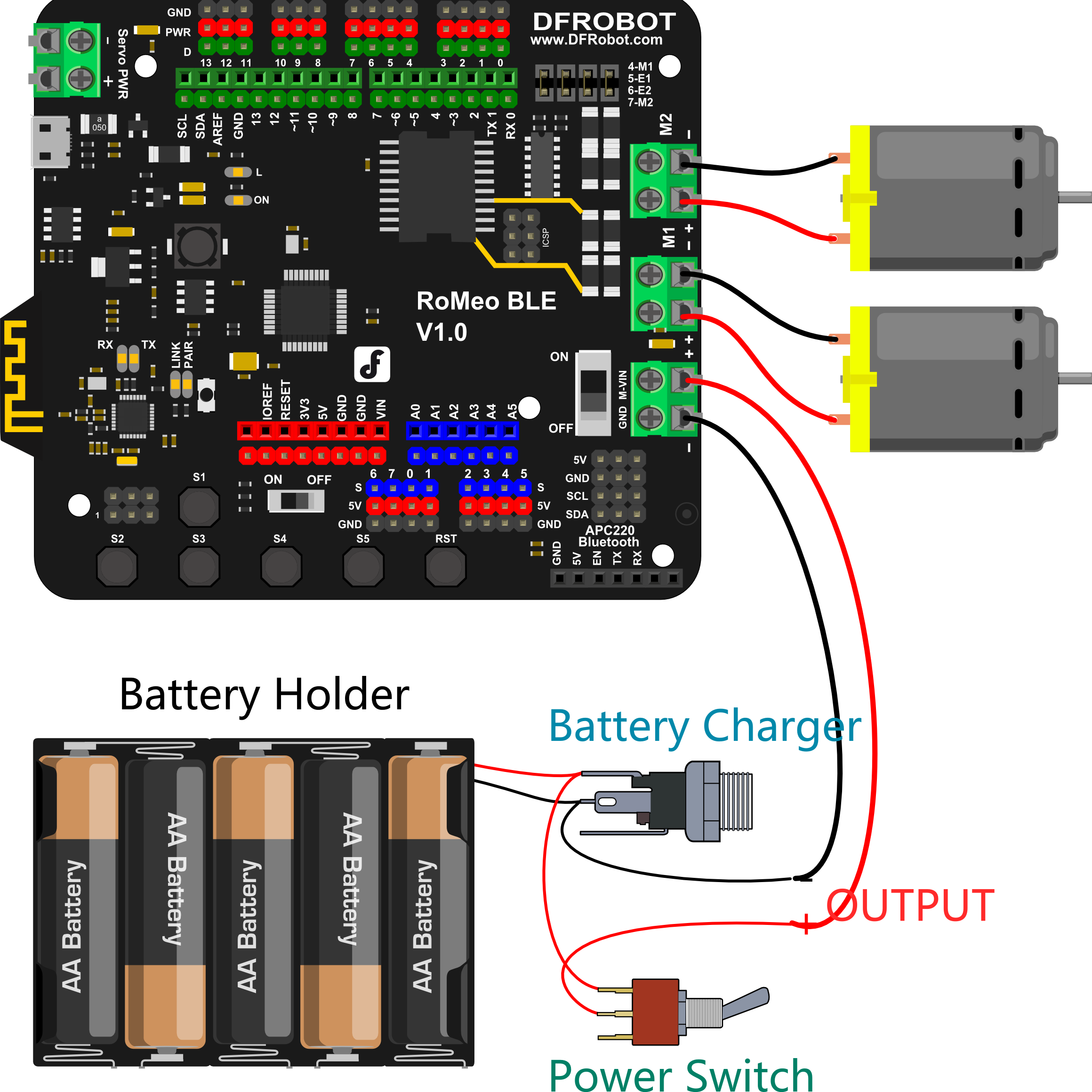
连接图
样例代码
' 下载电机调试代码'
int speedPin_M1 = 5; //M1 Speed Control
int speedPin_M2 = 6; //M2 Speed Control
int directionPin_M1 = 4; //M1 Direction Control
int directionPin_M2 = 7; //M1 Direction Control
void setup(){
}
void loop(){
carAdvance(100,100);
delay(1000);
carBack(100,100);
delay(1000);
carTurnLeft(250,250);
delay(1000);
carTurnRight(250,250);
delay(1000);
}
void carStop(){ // Motor Stop
digitalWrite(speedPin_M2,0);
digitalWrite(directionPin_M1,LOW);
digitalWrite(speedPin_M1,0);
digitalWrite(directionPin_M2,LOW);
}
void carTurnLeft(int leftSpeed,int rightSpeed){ //Turn Left
analogWrite (speedPin_M2,leftSpeed); //PWM Speed Control
digitalWrite(directionPin_M1,HIGH);
analogWrite (speedPin_M1,rightSpeed);
digitalWrite(directionPin_M2,HIGH);
}
void carTurnRight(int leftSpeed,int rightSpeed){ //Turn Right
analogWrite (speedPin_M2,leftSpeed);
digitalWrite(directionPin_M1,LOW);
analogWrite (speedPin_M1,rightSpeed);
digitalWrite(directionPin_M2,LOW);
}
void carBack(int leftSpeed,int rightSpeed){ //Move backward
analogWrite (speedPin_M2,leftSpeed);
digitalWrite(directionPin_M1,LOW);
analogWrite (speedPin_M1,rightSpeed);
digitalWrite(directionPin_M2,HIGH);
}
void carAdvance(int leftSpeed,int rightSpeed){ //Move forward
analogWrite (speedPin_M2,leftSpeed);
digitalWrite(directionPin_M1,HIGH);
analogWrite (speedPin_M1,rightSpeed);
digitalWrite(directionPin_M2,LOW);
}
扩展应用
小清新靓照一张
 购买
购买