简介
BNO055是实现智能9轴绝对定向的新型传感器IC,它将整个传感器系统级封装在一起,集成了三轴14位加速度计,三轴16位陀螺仪,三轴地磁传感器和一个自带算法处理的32位微控制器。它的尺寸仅为5.2 x 3.8 x 1.1mm³,明显小于同类离散或系统板载解决方案。是目前最小尺寸支持Windows 8.1的Sensor-hub产品。它既可单独提供三类传感器(加速度/地磁/陀螺仪)的单一数据,亦可提供组合数据,例如欧拉向量绝对方位、四元素绝对方位。通过内置MCU计算,省略了繁琐的算法处理,为智能手机、穿戴设备等产品提供更多方面的应用支持。
特性
- 传感器混合数据输出:四元素、欧拉角、旋转矢量、线性加速度、重力、朝向
- 集成三个传感器:
- 16位陀螺仪
- 14位加速度
- 地磁传感器
- 智能电源管理系统:正常、低功耗、睡眠
- 集成三个传感器:
技术规格
- 工作电压:3.3V-5.5V
- BNO055加速度:
- 加速度:±2g/±4g/±8g/±16
- 低通滤波频段:1kHz~<8Hz
- 工作模式:正常、睡眠、低功耗、待机、深度睡
- BNO055陀螺仪:
- 加速度:±2g/±4g/±8g/±16
- 低通滤波频段:1kHz~<8Hz
- 工作模式:正常、睡眠、低功耗、待机、深度睡
- BNO055陀螺仪:
- 范围:±125°/s~2000°/s
- 低通滤波频段:523Hz~12Hz
- 工作模式:正常,快速启动、深度睡眠、睡眠、高级省电
- 芯片中断控制:运动触发中断信号
- BNO055地磁:
- 范围:±1300uT(x-,y-axis);±2500uT(z-axis)
- 地磁分辨率:~0.3
- 工作模式:低功耗、定期、增强定期、高精度
- 工作模式:正常、睡眠、强制
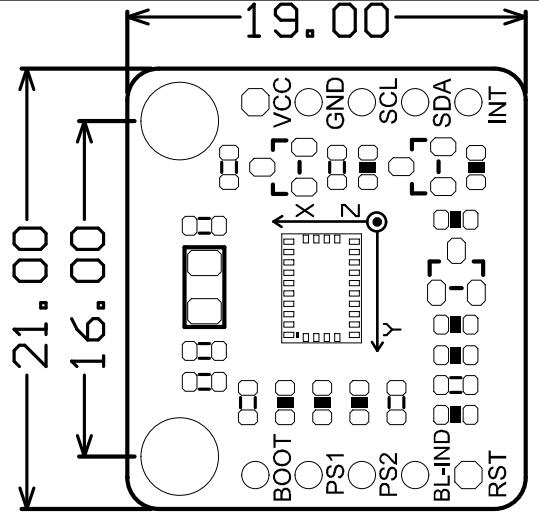
- 外形尺寸:19mm x 21mm
- 安装孔位置:16mm
- 安装孔尺寸:内径2mm/外径3.7mm
注意:该传感器默认I2C地址为0X28。
引脚说明


| 丝印 | 功能描述 |
|---|---|
| VCC | 电源正极 |
| GND | 电源负极 |
| SCL | I2C时钟 |
| SDA | I2C数据 |
| INT | 中断引脚 |
| BOOT | 引导模式选择引脚 |
| PS1 | 协议选择引脚1 |
| PS2 | 协议选择引脚2 |
| BL-IND | 引导程序指示 |
| RST | 复位引脚 |
| ADDR | I2C地址选择 |
| PS1 | PS2 | Functionalit |
|---|---|---|
| 0 | 0 | Standard/Fast 12C Interface |
| 0 | 1 | HID OVER I2C |
| 1 | 0 | UART Interface |
| 1 | 1 | Reserved |
注意:该传感器PS1、SP2默认设置为0、0
API接口函数
class DFRobot_BNO055 {
public:
/**
* @功能 全局轴枚举定义(可以在操作的时候区分操作的哪个轴的数据,四元数和欧拉角的枚举除外)
*/
typedef enum {
eAxisAcc,
eAxisMag,
eAxisGyr,
eAxisLia,
eAxisGrv
} eAxis_t;
/**
* @功能 全局单轴枚举定义(可以在操作的时候区分操作哪个单轴)
*/
typedef enum {
eSingleAxisX,
eSingleAxisY,
eSingleAxisZ
} eSingleAxis_t;
/**
* @功能 枚举中断类型
*/
typedef enum {
eIntGyrAm = 0x04,
eIntGyrHighRate = 0x08,
eIntAccHighG = 0x20,
eIntAccAm = 0x40,
eIntAccNm = 0x80,
eIntAll = 0xec
} eInt_t;
/**
* @功能 枚举操作模式
*/
typedef enum {
eOprModeConfig,
eOprModeAccOnly,
eOprModeMagOnly,
eOprModeGyroOnly,
eOprModeAccMag,
eOprModeAccGyro,
eOprModeMagGyro,
eOprModeAMG,
eOprModeImu,
eOprModeCompass,
eOprModeM4G,
eOprModeNdofFmcOff,
eOprModeNdof
} eOprMode_t;
/**
* @功能 枚举电源模式
*/
typedef enum {
ePowerModeNormal,
ePowerModeLowPower,
ePowerModeSuspend
} ePowerMode_t;
/**
* @功能 轴模拟量数据结构体
*/
typedef struct {
float x, y, z;
} sAxisAnalog_t;
/**
* @功能 欧拉角模拟量数据结构体
*/
typedef struct {
float head, roll, pitch;
} sEulAnalog_t;
/**
* @功能 四元素模拟量结构体
*/
typedef struct {
float w, x, y, z;
} sQuaAnalog_t;
/**
* @功能 枚举陀螺仪范围,单位为 G
*/
typedef enum {
eAccRange_2G,
eAccRange_4G,
eAccRange_8G,
eAccRange_16G
} eAccRange_t;
/**
* @功能 枚举陀螺仪带宽 HZ
*/
typedef enum {
eAccBandWidth_7_81, // 7.81HZ
eAccBandWidth_15_63, // 16.63HZ
eAccBandWidth_31_25,
eAccBandWidth_62_5,
eAccBandWidth_125,
eAccBandWidth_250,
eAccBandWidth_500,
eAccBandWidth_1000
} eAccBandWidth_t;
/**
* @功能 枚举陀螺仪电源模式
*/
typedef enum {
eAccPowerModeNormal,
eAccPowerModeSuspend,
eAccPowerModeLowPower1,
eAccPowerModeStandby,
eAccPowerModeLowPower2,
eAccPowerModeDeepSuspend
} eAccPowerMode_t;
/**
* @功能 枚举地磁计数据输出频率,单位 HZ
*/
typedef enum {
eMagDataRate_2,
eMagDataRate_6,
eMagDataRate_8,
eMagDataRate_10,
eMagDataRate_15,
eMagDataRate_20,
eMagDataRate_25,
eMagDataRate_30
} eMagDataRate_t;
/**
* @功能 枚举地磁计操作模式
*/
typedef enum {
eMagOprModeLowPower,
eMagOprModeRegular,
eMagOprModeEnhancedRegular,
eMagOprModeHighAccuracy
} eMagOprMode_t;
/**
* @功能 枚举地磁计电源模式
*/
typedef enum {
eMagPowerModeNormal,
eMagPowerModeSleep,
eMagPowerModeSuspend,
eMagPowerModeForce
} eMagPowerMode_t;
/**
* @功能 枚举陀螺仪数据范围 dps
*/
typedef enum {
eGyrRange_2000,
eGyrRange_1000,
eGyrRange_500,
eGyrRange_250,
eGyrRange_125
} eGyrRange_t;
/**
* @功能 枚举陀螺仪带宽,单位 HZ
*/
typedef enum {
eGyrBandWidth_523,
eGyrBandWidth_230,
eGyrBandWidth_116,
eGyrBandWidth_47,
eGyrBandWidth_23,
eGyrBandWidth_12,
eGyrBandWidth_64,
eGyrBandWidth_32
} eGyrBandWidth_t;
/**
* @功能 枚举陀螺仪电源模式
*/
typedef enum {
eGyrPowerModeNormal,
eGyrPowerModeFastPowerUp,
eGyrPowerModeDeepSuspend,
eGyrPowerModeSuspend,
eGyrPowerModeAdvancedPowersave
} eGyrPowerMode_t;
/**
* @功能 枚举加速度计中断信号
*/
typedef enum {
eAccIntSetAmnmXAxis = (0x01 << 2),
eAccIntSetAmnmYAxis = (0x01 << 3),
eAccIntSetAmnmZAxis = (0x01 << 4),
eAccIntSetHgXAxis = (0x01 << 5),
eAccIntSetHgYAxis = (0x01 << 6),
eAccIntSetHgZAxis = (0x01 << 7),
eAccIntSetAll = 0xfc
} eAccIntSet_t;
/**
* @功能 枚举加速度计低速运动中断或无运动中断
*/
typedef enum {
eAccNmSmnmSm, // 低速运动中断模式
eAccNmSmnmNm // 无运动中断模式
} eAccNmSmnm_t;
/**
* @功能 枚举陀螺仪中断设置
*/
typedef enum {
eGyrIntSetAmXAxis = (0x01 << 0),
eGyrIntSetAmYAxis = (0x01 << 1),
eGyrIntSetAmZAxis = (0x01 << 2),
eGyrIntSetHrXAxis = (0x01 << 3),
eGyrIntSetHrYAxis = (0x01 << 4),
eGyrIntSetHrZAxis = (0x01 << 5),
eGyrIntSetAmFilt = (0x01 << 6),
eGyrIntSetHrFilt = (0x01 << 7),
eGyrIntSetAll = 0x3f
} eGyrIntSet_t;
/**
* @功能 声明传感器状态
*/
typedef enum {
eStatusOK, // 无问题
eStatusErr, // 未知错误
eStatusErrDeviceNotDetect, // 设备无法连接
eStatusErrDeviceReadyTimeOut, // 设备准备就绪超时
eStatusErrDeviceStatus, // 设备内部状态错误
eStatusErrParameter // 函数参数错误
} eStatus_t;
/**
* @功能 begin 传感器初始化
* @返回 传感器状态
*/
eStatus_t begin();
/**
* @功能 getAxisAnalog 获取相应轴的模拟量数据
* @参数 eAxis 一个来自于 eAxis_t 的轴声明
* @返回 结构体 sAxisAnalog_t, 包含轴的模拟量数据, 成员的数据单位取决于 eAxis 的值:
* 如果是 eAxisAcc, 单位是 mg
* 如果是 eAxisLia, 单位是 mg
* 如果是 eAxisGrv, 单位是 mg
* 如果是 eAxisMag, 单位是 ut
* 如果是 eAxisGyr, 单位是 dps
*/
sAxisAnalog_t getAxis(eAxis_t eAxis);
/**
* @功能 getEulAnalog 获取欧拉角的模拟量数据
* @返回 结构体 sEulAnalog_t, 包含欧拉角的模拟量数据
*/
sEulAnalog_t getEul();
/**
* @功能 getQuaAnalog 获取四元数的模拟量数据
* @返回 结构体 sQuaAnalog_t, 板换四元数的模拟量数据
*/
sQuaAnalog_t getQua();
/**
* @功能 setAccOffset 设置轴偏移
* @参数 eAxis 一个来自于 eAxis_t 的轴声明, 仅仅只支持加速度计,陀螺仪和地磁计
* @参数 sOffset 结构体 sAxisAnalog_t, 包含轴的模拟量数据, 成员数据的单位取决于 eAxis:
* 如果是 eAxisAcc, 单位 mg, 值不能超过加速度计设置的数据范围
* 如果是 eAxisMag, 单位 ut, 值不能超过地磁计设置的数据范围
* 如果是 eAxisGyr, 单位 dps, 值不能超过陀螺仪设置的数据范围
*/
void setAxisOffset(eAxis_t eAxis, sAxisAnalog_t sOffset);
/**
* @功能 setOprMode 设置操作模式
* @参数 eOpr 一个来自于 eOprMode_t 的操作声明
*/
void setOprMode(eOprMode_t eMode);
/**
* @功能 setPowerMode 设置电源模式
* @参数 eMode 一个来自于 ePowerMode_t 的电源模式声明
*/
void setPowerMode(ePowerMode_t eMode);
/**
* @功能 重置传感器
*/
void reset();
/**
* @功能 setAccRange 设置加速度计测量范围, 默认值是 4g
* @参数 eRange 一个来自于 eAccRange_t 的范围声明
*/
void setAccRange(eAccRange_t eRange);
/**
* @功能 setAccBandWidth 设置加速度计带宽, 默认值是 62.5hz
* @参数 eBand 一个来自于 eAccBandWidth_t 的带宽声明
*/
void setAccBandWidth(eAccBandWidth_t eBand);
/**
* @功能 setAccPowerMode 设置加速度计电源模式, 默认值是 eAccPowerModeNormal
* @参数 eMode 一个来自于 eAccPowerMode_t 的电源模式声明
*/
void setAccPowerMode(eAccPowerMode_t eMode);
/**
* @功能 setMagDataRate 设置地磁计的数据输出频率, 默认值是 20hz
* @参数 eRate 一个来自于 eMagDataRate_t 的频率声明
*/
void setMagDataRate(eMagDataRate_t eRate);
/**
* @功能 setMagOprMode 设置地磁计的操作模式, 默认值是 eMagOprModeRegular
* @参数 eMode 一个来自于 eMagOprMode_t 的操作声明
*/
void setMagOprMode(eMagOprMode_t eMode);
/**
* @功能 setMagPowerMode 设置地磁计的电源模式, 默认值是 eMagePowerModeForce
* @参数 eMode 一个来自于 eMagPowerMode_t 的电源模式声明
*/
void setMagPowerMode(eMagPowerMode_t eMode);
/**
* @功能 setGyrRange 设置陀螺仪数据范围, 默认值是 2000
* @参数 eRange 一个来自于 eGyrRange_t 的范围声明
*/
void setGyrRange(eGyrRange_t eRange);
/**
* @功能 setGyrBandWidth 设置陀螺仪的带宽范围, 默认值是 32HZ
* @参数 eBandWidth 一个来自于 eGyrBandWidth_t 的带宽声明
*/
void setGyrBandWidth(eGyrBandWidth_t eBandWidth);
/**
* @功能 setGyrPowerMode 设置陀螺仪的电源模式, 默认值是 eGyrPowerModeNormal
* @参数 eMode 一个来自于 eGyrPowerMode_t 的电源模式声明
*/
void setGyrPowerMode(eGyrPowerMode_t eMode);
/**
* @功能 getIntState 获取中断状态, 中断在读取状态后自动清楚
* @返回 如果返回值大于 0, 则至少有一个中断被触发了, 返回值 & eIntXXX (来自于 eInt_t) 来测试触发的是哪个中断
*/
uint8_t getIntState();
/**
* @功能 setIntMask 允许选中的中断掩码, 影响中断引脚,如果设置正确则会在中断引脚上有一个上升沿中断
* @参数 eInt 一个或多个来自于 eInt_t 的中断标志, 使用或的逻辑输入它们
*/
void setIntMaskEnable(eInt_t eInt);
/**
* @功能 setIntMaskDisable 静止选中的中断掩码
* @参数 eInt 一个或多个来自于 eInt_t 的中断标志, 使用或的逻辑输入它们
*/
void setIntMaskDisable(eInt_t eInt);
/**
* @功能 setIntEnEnable 允许选中的中断
* @参数 eInt 一个或多个来自于 eInt_t 的中断标志, 使用或的逻辑输入它们
*/
void setIntEnable(eInt_t eInt);
/**
* @功能 setIntEnDisable 禁止选中的中断
* @参数 eInt 一个或多个来自于 eInt_t 的中断标志, 使用或的逻辑输入它们
*/
void setIntDisable(eInt_t eInt);
/**
* @功能 setAccAmThres 设置加速度计任意运动中断阀值
* @参数 thres 要设置的阀值, 单位是 mg, 值得范围依赖于选择的加速度计数据范围,
* 如果是 2g, 不能超过 1991
* 如果是 4g, 不能超过 3985
* 如果是 8g, 不能超过 7968
* 如果是 16g, 不能超过 15937
* 注意:根据技术手册,实际值将会与设定值有点偏差
*/
void setAccAmThres(uint16_t thres);
/**
* @功能 setAccIntDur 设置加速度计中断触发延迟次数,
* 如果任意运动中断触发次数超过 (dur + 1) 次,才会触发任意运动中断信号,
* @参数 dur 要设置的延迟,范围 1 到 4
*/
void setAccIntAmDur(uint8_t dur);
/**
* @功能 setAccIntEnable 允许相应的加速度计中断
* @参数 eInt 一个或多个来自于 eAccIntSet_t 的中断标志, 使用或的逻辑输入它们
*/
void setAccIntEnable(eAccIntSet_t eInt);
/**
* @功能 setAccIntDisable 禁止相应的加速度计中断
* @参数 eInt 一个或多个来自于 eAccIntSet_t 的中断标志, 使用或的逻辑输入它们
*/
void setAccIntDisable(eAccIntSet_t eInt);
/**
* @功能 setAccHighGDuration 设置加速度计高加速度中断, 高加速度速中断延时时间为 [dur + 1] * 2 ms
* @参数 dur 2ms 到 512ms 之间的时间
*/
void setAccHighGDuration(uint16_t dur);
/**
* @功能 setAccHighGThres 设置加速度计高加速度阀值
* @参数 thres 要设置的阀值,单位 mg, 值不能超过加速度计设置的数据范围
* 如果是 2g, 不能超过 1991
* 如果是 4g, 不能超过 3985
* 如果是 8g, 不能超过 7968
* 如果是 16g, 不能超过 15937
* 注意:根据技术手册,实际值将会与设定值有点偏差
*/
void setAccHighGThres(uint16_t thres);
/**
* @功能 setAccNmThres 设置加速度计无运动中断阀值
* @参数 thres 要设置的阀值,单位 mg, 值不能超过加速度计设置的数据范围
* 如果是 2g, 不能超过 1991
* 如果是 4g, 不能超过 3985
* 如果是 8g, 不能超过 7968
* 如果是 16g, 不能超过 15937
* 注意:根据技术手册,实际值将会与设定值有点偏差
*/
void setAccNmThres(uint16_t thres);
/**
* @功能 setAccNmSet 设置加速度计中断为慢运动或无运动,以及该中断的超时时间
* @参数 eSmnm 来自于 eAccNmSmnm_t 的枚举
* @参数 dur 中断触发延时 (单位为秒), 不能超过 344.
* 注意:根据技术手册,实际值将会与设定值有点偏差
*/
void setAccNmSet(eAccNmSmnm_t eSmnm, uint16_t dur);
/**
* @功能 setGyrIntEnable 允许选择的陀螺仪中断
* @参数 eInt 一个或多个来自于 eGyrIntSet_t 的中断标志, 使用或的逻辑输入它们
*/
void setGyrIntEnable(eGyrIntSet_t eInt);
/**
* @功能 setGyrIntDisable 禁止相应的陀螺仪中断
* @参数 eInt 一个或多个来自于 eGyrIntSet_t 的中断标志, 使用或的逻辑输入它们
*/
void setGyrIntDisable(eGyrIntSet_t eInt);
/**
* @功能 setGyrHrSet 设置陀螺仪高速中断
* @参数 eSingleAxis 要设置的单个轴
* @参数 thres 要设置的高速中断阀值, 单位 度/秒, 值不能超过陀螺仪设置的数据范围
* 如果是 2000, 不能超过 1937
* 如果是 1000, 不能超过 968
* 如果是 500, 不能超过 484
* 如果是 250, 不能超过 242
* 如果是 125, 不能超过 121
* 注意:根据技术手册,实际值将会与设定值有点偏差
* @参数 dur 高速中断延时, 单位 ms, 时间在 2.5ms 到 640ms 之间
* 注意:根据技术手册,实际值将会与设定值有点偏差
*/
void setGyrHrSet(eSingleAxis_t eSingleAxis, uint16_t thres, uint16_t dur);
/**
* @功能 setGyrAmThres 设置陀螺仪任意运动中断阀值
* @参数 thres 要设置的阀值, 单位 mg, 值不能超过陀螺仪设置的数据范围
* 如果是 2000, 不能超过 128
* 如果是 1000, 不能超过 64
* 如果是 500, 不能超过 32
* 如果是 250, 不能超过 16
* 如果是 125, 不能超过 8
* 注意:根据技术手册,实际值将会与设定值有点偏差
*/
void setGyrAmThres(uint8_t thres);
/**
* @功能 lastOpreateStatus 保存最近一次类中函数的操作结果
*/
eStatus_t lastOpreateStatus;
};
class DFRobot_BNO055_IIC : public DFRobot_BNO055 {
public:
/**
* @功能 DFRobot_BNO055_IIC 类构造体
* @参数 pWire 选择一个 TwoWire 类外设
* @参数 addr 传感器地址
*/
DFRobot_BNO055_IIC(TwoWire *pWire, uint8_t addr);
};
使用教程
该模块板载BNO055传感器,可以用I2C接口访问BNO055的I2C地址,从而获取相应的位置数据。
准备
- 硬件
- 1 x Arduino UNO控制板
- 1 x BNO055 Intelligent 9-axis sensor module模块
- 若干 杜邦线
- 软件
- Arduino IDE 点击下载Arduino IDE
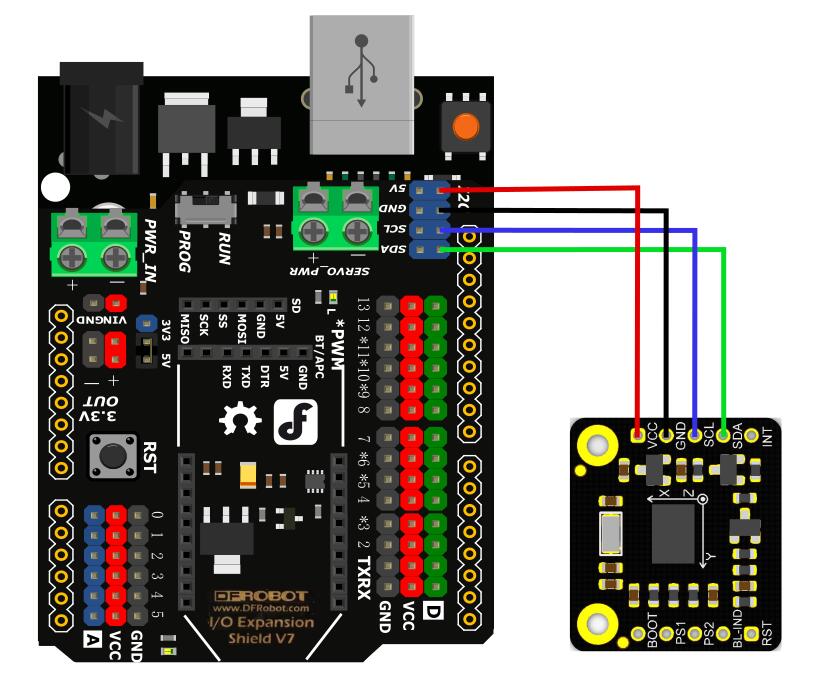
接线图
连接模块与UNO主板(通过I2C接口),按照如下图的方式连接。
样例代码
样例代码
程序功能:通过I2C接口读取BNO055传感器的仰角、翻滚角、偏航角,并将读取到的数据通过串口打印出来。此demo结合我们为此设计的一个可视化小软件 Euler angle visual tool.exe 使用,能更直观的显示10Dof姿态的变化,如下图gif所示:
/*!
* imu_show.ino
*
* Download this demo to show attitude on [imu_show](https://github.com/DFRobot/DFRobot_IMU_Show)
* Attitude will show on imu_show
*
* Product: https://www.dfrobot.com.cn/goods-1860.html
* Copyright [DFRobot](https://www.dfrobot.com), 2016
* Copyright GNU Lesser General Public License
*
* version V1.0
* date 07/03/2019
*/
#include "DFRobot_BNO055.h"
#include "Wire.h"
typedef DFRobot_BNO055_IIC BNO; // ******** use abbreviations instead of full names ********
BNO bno(&Wire, 0x28); // input TwoWire interface and IIC address
// show last sensor operate status
void printLastOperateStatus(BNO::eStatus_t eStatus)
{
switch(eStatus) {
case BNO::eStatusOK: Serial.println("everything ok"); break;
case BNO::eStatusErr: Serial.println("unknow error"); break;
case BNO::eStatusErrDeviceNotDetect: Serial.println("device not detected"); break;
case BNO::eStatusErrDeviceReadyTimeOut: Serial.println("device ready time out"); break;
case BNO::eStatusErrDeviceStatus: Serial.println("device internal status error"); break;
default: Serial.println("unknow status"); break;
}
}
void setup()
{
Serial.begin(115200);
bno.reset();
while(bno.begin() != BNO::eStatusOK) {
Serial.println("bno begin faild");
printLastOperateStatus(bno.lastOperateStatus);
delay(2000);
}
Serial.println("bno begin success");
}
void loop()
{
BNO::sEulAnalog_t sEul;
sEul = bno.getEul();
Serial.print("pitch:");
Serial.print(sEul.pitch, 3);
Serial.print(" ");
Serial.print("roll:");
Serial.print(sEul.roll, 3);
Serial.print(" ");
Serial.print("yaw:");
Serial.print(sEul.head, 3);
Serial.println(" ");
delay(80);
}
如果把BNO055模块比作一架机头指向正东方向的飞机,则x轴指向方向为机头方向,y轴左机翼指向正北方向,z轴垂直于x轴与y轴形成的平面xoy,当BNO055模块的x,y,z完全与上述方向重合,则pitch、roll、yaw的值均为0度。其中pitch(仰角)为机头沿y轴上仰或下仰后,与xoy平面所形成的夹角,向上为正,向下为负;roll(翻滚角)为机身沿x轴左右翻滚后,与xoy平面所形成的夹角;yaw(偏航角)为机头沿z轴旋转后与xoz平面所形成的夹角;

使用测试软件观察传感器姿态时需关闭串口打印所占用的串口!
样例代码
程序功能:获取传感器在x、y、z轴上的各项数据,并通过串口打印出来。
/*!
* read_data.ino
*
* Download this demo to test read data from bno055
* Data will print on your serial monitor
*
* Product: https://www.dfrobot.com.cn/goods-1860.html
* Copyright [DFRobot](https://www.dfrobot.com), 2016
* Copyright GNU Lesser General Public License
*
* version V1.0
* date 07/03/2019
*/
#include "DFRobot_BNO055.h"
#include "Wire.h"
typedef DFRobot_BNO055_IIC BNO; // ******** use abbreviations instead of full names ********
BNO bno(&Wire, 0x28); // input TwoWire interface and IIC address
// show last sensor operate status
void printLastOperateStatus(BNO::eStatus_t eStatus)
{
switch(eStatus) {
case BNO::eStatusOK: Serial.println("everything ok"); break;
case BNO::eStatusErr: Serial.println("unknow error"); break;
case BNO::eStatusErrDeviceNotDetect: Serial.println("device not detected"); break;
case BNO::eStatusErrDeviceReadyTimeOut: Serial.println("device ready time out"); break;
case BNO::eStatusErrDeviceStatus: Serial.println("device internal status error"); break;
default: Serial.println("unknow status"); break;
}
}
void setup()
{
Serial.begin(115200);
bno.reset();
while(bno.begin() != BNO::eStatusOK) {
Serial.println("bno begin faild");
printLastOperateStatus(bno.lastOperateStatus);
delay(2000);
}
Serial.println("bno begin success");
}
#define printAxisData(sAxis) \
Serial.print(" x: "); \
Serial.print(sAxis.x); \
Serial.print(" y: "); \
Serial.print(sAxis.y); \
Serial.print(" z: "); \
Serial.println(sAxis.z)
void loop()
{
BNO::sAxisAnalog_t sAccAnalog, sMagAnalog, sGyrAnalog, sLiaAnalog, sGrvAnalog;
BNO::sEulAnalog_t sEulAnalog;
BNO::sQuaAnalog_t sQuaAnalog;
sAccAnalog = bno.getAxis(BNO::eAxisAcc); // read acceleration
sMagAnalog = bno.getAxis(BNO::eAxisMag); // read geomagnetic
sGyrAnalog = bno.getAxis(BNO::eAxisGyr); // read gyroscope
sLiaAnalog = bno.getAxis(BNO::eAxisLia); // read linear acceleration
sGrvAnalog = bno.getAxis(BNO::eAxisGrv); // read gravity vector
sEulAnalog = bno.getEul(); // read euler angle
sQuaAnalog = bno.getQua(); // read quaternion
Serial.println();
Serial.println("======== analog data print start ========");
Serial.print("acc analog: (unit mg) "); printAxisData(sAccAnalog);
Serial.print("mag analog: (unit ut) "); printAxisData(sMagAnalog);
Serial.print("gyr analog: (unit dps) "); printAxisData(sGyrAnalog);
Serial.print("lia analog: (unit mg) "); printAxisData(sLiaAnalog);
Serial.print("grv analog: (unit mg) "); printAxisData(sGrvAnalog);
Serial.print("eul analog: (unit degree) "); Serial.print(" head: "); Serial.print(sEulAnalog.head); Serial.print(" roll: "); Serial.print(sEulAnalog.roll); Serial.print(" pitch: "); Serial.println(sEulAnalog.pitch);
Serial.print("qua analog: (no unit) "); Serial.print(" w: "); Serial.print(sQuaAnalog.w); printAxisData(sQuaAnalog);
Serial.println("======== analog data print end ========");
delay(1000);
}
样例代码
程序功能:监听传感器的各种中断,包含高速运动或低速运功中断,快速倾斜中断
/*!
* interrupt.ino
*
* Download this demo to test bno055 interrupt
* Connect bno055 int pin to arduino pin 2
* If there occurs interrupt, it will printr on you serial monitor, more detail please reference comment
*
* Product: https://www.dfrobot.com.cn/goods-1860.html
* Copyright [DFRobot](https://www.dfrobot.com), 2016
* Copyright GNU Lesser General Public License
*
* version V1.0
* date 07/03/2019
*/
#include "DFRobot_BNO055.h"
#include "Wire.h"
typedef DFRobot_BNO055_IIC BNO; // ******** use abbreviations instead of full names ********
BNO bno(&Wire, 0x28); // input TwoWire interface and IIC address
// show last sensor operate status
void printLastOperateStatus(BNO::eStatus_t eStatus)
{
switch(eStatus) {
case BNO::eStatusOK: Serial.println("everything ok"); break;
case BNO::eStatusErr: Serial.println("unknow error"); break;
case BNO::eStatusErrDeviceNotDetect: Serial.println("device not detected"); break;
case BNO::eStatusErrDeviceReadyTimeOut: Serial.println("device ready time out"); break;
case BNO::eStatusErrDeviceStatus: Serial.println("device internal status error"); break;
default: Serial.println("unknow status"); break;
}
}
bool intFlag = false;
void intHandle()
{
intFlag = true;
}
void setup()
{
Serial.begin(115200);
bno.reset();
while(bno.begin() != BNO::eStatusOK) {
Serial.println("bno begin faild");
printLastOperateStatus(bno.lastOperateStatus);
delay(2000);
}
Serial.println("bno begin success");
bno.setOprMode(BNO::eOprModeConfig); // set to config mode
bno.setIntMaskEnable(BNO::eIntAll); // set interrupt mask enable, signal to int pin when interrupt
// bno.setIntMaskDisable(BNO::eIntAccAm | BNO::eIntAccNm); // set interrupt mask disable, no signal to int pin when interrupt
bno.setIntEnable(BNO::eIntAll); // set interrupt enable
// bno.setIntDisable(BNO::eIntAccAm | BNO::eIntAccNm); // set interrupt disable
bno.setAccIntEnable(BNO::eAccIntSetAll); // set accelerometer interrupt enable
// bno.setAccIntDisable(BNO::eAccIntSetAmnmXAxis | BNO::eAccIntSetHgXAxis); // set accelerometer interrupt disable
/* accelerometer any motion threshold to set, unit mg, value is dependent on accelerometer range selected,
* case 2g, no more than 1991
* case 4g, no more than 3985
* case 8g, no more than 7968
* case 16g, no more than 15937
* attenion: The set value will be slightly biased according to datasheet
* tips: default accelerometer range is 4g
*/
// how to trig this: still --> fast move
bno.setAccAmThres(200);
// any motion interrupt triggers if duration consecutive data points are above the any motion interrupt
// threshold define in any motion threshold
bno.setAccIntAmDur(1);
// set high-g duration, value from 2ms to 512ms
bno.setAccHighGDuration(80);
/*
* accelerometer high-g threshold to set, unit mg, value is dependent on accelerometer range selected,
* case 2g, no more than 1991
* case 4g, no more than 3985
* case 8g, no more than 7968
* case 16g, no more than 15937
* Attenion: The set value will be slightly biased according to datasheet
*/
// how to trig this: still --> (very) fast move
bno.setAccHighGThres(900);
// accelerometer (no motion) / (slow motion) settings, 2nd parameter unit seconds, no more than 344
bno.setAccNmSet(BNO::eAccNmSmnmNm, 4);
/*
* accelerometer no motion threshold to set, unit mg, value is dependent on accelerometer range selected,
* case 2g, no more than 1991
* case 4g, no more than 3985
* case 8g, no more than 7968
* case 16g, no more than 15937
* Attenion: The set value will be slightly biased according to datasheet
*/
// hot to trig this: any motion --> still --> still
bno.setAccNmThres(100);
bno.setGyrIntEnable((BNO::eGyrIntSet_t) (BNO::eGyrIntSetHrXAxis | BNO::eGyrIntSetHrYAxis | BNO::eGyrIntSetHrZAxis)); // set gyroscope interrupt enable, in most cases, this is enough.
// bno.setGyrIntEnable(BNO::eGyrIntSetAmYAxis | BNO::eGyrIntSetAmYAxis | BNO::eGyrIntSetAmZAxis); // set gyroscope interrupt enable
// bno.setGyrIntDisable(BNO::eGyrIntSetHrXAxis | BNO::eGyrIntSetAmXAxis); // set gyroscope interrupt disable
/*
* 2nd parameter, high rate threshold to set, unit degree/seconds, value is dependent on gyroscope range selected,
* case 2000, no more than 1937
* case 1000, no more than 968
* case 500, no more than 484
* case 250, no more than 242
* case 125, no more than 121
* Attenion: The set value will be slightly biased according to datasheet
* 3rd parameter, high rate duration to set, unit ms, duration from 2.5ms to 640ms
* Attenion: The set value will be slightly biased according to datasheet
*/
// how to trigger this: still --> fast tilt
bno.setGyrHrSet(BNO::eSingleAxisX, 300, 80);
bno.setGyrHrSet(BNO::eSingleAxisY, 300, 80);
bno.setGyrHrSet(BNO::eSingleAxisZ, 300, 80);
/*
* gyroscope any motion threshold to set, unit mg, value is dependent on accelerometer range selected,
* case 2000, no more than 128
* case 1000, no more than 64
* case 500, no more than 32
* case 250, no more than 16
* case 125, no more than 8
* Attenion: The set value will be slightly biased according to datasheet
* tips: default range is 2000
*/
// how to trigger this: still --> fast tilt
bno.setGyrAmThres(20);
bno.setOprMode(BNO::eOprModeNdof); // configure done
attachInterrupt(0, intHandle, RISING); // attach interrupt
bno.getIntState(); // clear unexpected interrupt
intFlag = false;
}
void loop()
{
if(intFlag) {
intFlag = false;
uint8_t intSta = bno.getIntState(); // interrupt auto clear after read
Serial.println("interrupt detected");
if(intSta & BNO::eIntAccAm)
Serial.println("accelerometer any motion detected");
if(intSta & BNO::eIntAccNm)
Serial.println("accelerometer no motion detected");
if(intSta & BNO::eIntAccHighG)
Serial.println("acceleromter high-g detected");
if(intSta & BNO::eIntGyrHighRate)
Serial.println("gyroscope high rate detected");
if(intSta & BNO::eIntGyrAm)
Serial.println("gyroscope any motion detected");
}
}
样例代码
程序功能:对传感器进行各项配置
/*!
* config.ino
*
* Download this demo to test config to bno055
* Data will print on your serial monitor
*
* Product: https://www.dfrobot.com.cn/goods-1860.html
* Copyright [DFRobot](https://www.dfrobot.com), 2016
* Copyright GNU Lesser General Public License
*
* version V1.0
* date 07/03/2019
*/
#include "DFRobot_BNO055.h"
#include "Wire.h"
typedef DFRobot_BNO055_IIC BNO; // ******** use abbreviations instead of full names ********
BNO bno(&Wire, 0x28); // input TwoWire interface and IIC address
// show last sensor operate status
void printLastOperateStatus(BNO::eStatus_t eStatus)
{
switch(eStatus) {
case BNO::eStatusOK: Serial.println("everything ok"); break;
case BNO::eStatusErr: Serial.println("unknow error"); break;
case BNO::eStatusErrDeviceNotDetect: Serial.println("device not detected"); break;
case BNO::eStatusErrDeviceReadyTimeOut: Serial.println("device ready time out"); break;
case BNO::eStatusErrDeviceStatus: Serial.println("device internal status error"); break;
default: Serial.println("unknow status"); break;
}
}
void setup()
{
Serial.begin(115200);
bno.reset();
while(bno.begin() != BNO::eStatusOK) {
Serial.println("bno begin faild");
printLastOperateStatus(bno.lastOperateStatus);
delay(2000);
}
Serial.println("bno begin success");
bno.setPowerMode(BNO::ePowerModeNormal); // set to normal power mode
bno.setOprMode(BNO::eOprModeConfig); // must set sensor to config-mode before configure
bno.setAccPowerMode(BNO::eAccPowerModeNormal); // set acc to normal power mode
bno.setGyrPowerMode(BNO::eGyrPowerModeNormal); // set gyr to normal power mode
bno.setMagPowerMode(BNO::eMagPowerModeForce); // set mag to force power mode
// accelerometer normal configure
bno.setAccRange(BNO::eAccRange_4G); // set range to 4g
bno.setAccBandWidth(BNO::eAccBandWidth_62_5); // set band width 62.5HZ
bno.setAccPowerMode(BNO::eAccPowerModeNormal); // set accelerometer power mode
// magnetometer normal configure
bno.setMagDataRate(BNO::eMagDataRate_20); // set output data rate 20HZ
bno.setMagPowerMode(BNO::eMagPowerModeForce); // set power mode
bno.setMagOprMode(BNO::eMagOprModeRegular); // set operate mode
// gyroscope normal configure
bno.setGyrRange(BNO::eGyrRange_2000); // set range
bno.setGyrBandWidth(BNO::eGyrBandWidth_32); // set band width
bno.setGyrPowerMode(BNO::eGyrPowerModeNormal); // set power mode
BNO::sAxisAnalog_t sOffsetAcc; // unit mg, members can't out of acc range
BNO::sAxisAnalog_t sOffsetMag; // unit ut, members can't out of mag range
BNO::sAxisAnalog_t sOffsetGyr; // unit dps, members can't out of gyr range
sOffsetAcc.x = 1;
sOffsetAcc.y = 1;
sOffsetAcc.z = 1;
sOffsetMag.x = 1;
sOffsetMag.y = 1;
sOffsetMag.z = 1;
sOffsetGyr.x = 1;
sOffsetGyr.y = 1;
sOffsetGyr.z = 1;
bno.setAxisOffset(BNO::eAxisAcc, sOffsetAcc); // set offset
bno.setAxisOffset(BNO::eAxisMag, sOffsetMag);
bno.setAxisOffset(BNO::eAxisGyr, sOffsetGyr);
bno.setOprMode(BNO::eOprModeNdof); // shift to other operate mode, reference datasheet for more detail
}
#define printAxisData(sAxis) \
Serial.print(" x: "); \
Serial.print(sAxis.x); \
Serial.print(" y: "); \
Serial.print(sAxis.y); \
Serial.print(" z: "); \
Serial.println(sAxis.z)
void loop()
{
BNO::sAxisAnalog_t sAccAnalog, sMagAnalog, sGyrAnalog, sLiaAnalog, sGrvAnalog;
BNO::sEulAnalog_t sEulAnalog;
BNO::sQuaAnalog_t sQuaAnalog;
sAccAnalog = bno.getAxis(BNO::eAxisAcc);
sMagAnalog = bno.getAxis(BNO::eAxisMag);
sGyrAnalog = bno.getAxis(BNO::eAxisGyr);
sLiaAnalog = bno.getAxis(BNO::eAxisLia);
sGrvAnalog = bno.getAxis(BNO::eAxisGrv);
sEulAnalog = bno.getEul();
sQuaAnalog = bno.getQua();
Serial.println();
Serial.println("======== analog data print start ========");
Serial.print("acc analog: (unit mg) "); printAxisData(sAccAnalog);
Serial.print("mag analog: (unit ut) "); printAxisData(sMagAnalog);
Serial.print("gyr analog: (unit dps) "); printAxisData(sGyrAnalog);
Serial.print("lia analog: (unit mg) "); printAxisData(sLiaAnalog);
Serial.print("grv analog: (unit mg) "); printAxisData(sGrvAnalog);
Serial.print("eul analog: (unit degree) "); Serial.print(" head: "); Serial.print(sEulAnalog.head); Serial.print(" roll: "); Serial.print(sEulAnalog.roll); Serial.print(" pitch: "); Serial.println(sEulAnalog.pitch);
Serial.print("qua analog: (no unit) "); Serial.print(" w: "); Serial.print(sQuaAnalog.w); printAxisData(sQuaAnalog);
Serial.println("======== analog data print end ========");
delay(1000);
}
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
更多
 [DFRobot商城购买链接]
[DFRobot商城购买链接]