简介
Gravity: pyboard I/O扩展板是一款专为pyboard v1.1设计的多功能扩展板,兼容Gravity系列各类传感器和电子模块,即插即用,无需焊接,不但为你省去了繁琐的连线、焊接等操作,而且能帮助你快速外接并上手各类传感器或电子模块,更快的搭建出原型。
扩展板配备了一个外接供电接口和一个3.3V/VIN电源切换开关,支持电机、舵机等大电流元件;最大限度的引出了pyboard的管脚:引出了12组数字口、8组模拟口、1组串口、2组I2C口,可以方便的外接大量模块;板载3.3V LDO,满足多个模块同时使用时的用电需求;板载RST按键与USR按键,方便复位、重置等操作。

1.扩展板插到主板时,请注意方向,不要插反。扩展板插到主板上后,扩展板的接线柱应与主板的USB接口在同一侧。
2.由于pyboard工作于3.3V,受电压限制,因此不支持5V的模拟量输入,所有的信号管脚电平也是0\~3.3V。
3.如需驱动舵机、电机等大电流元件,请接至X1\~X4端口,并接好外接电源,将电源切换开关拨至VIN,否则可能由于电流过大造成主板损坏。
4.除X1\~X4端口的电源电压可由电源切换开关选择3.3V或VIN,其余端口的电源电压都为3.3V。
技术规格
- 外接电源输入电压:5~12V
- 外接电源输入电流:<1A(持续)
- 接口方式:Gravity系列标准接口
- 接口引出:12组数字口、8组模拟口、1组串口、2组I2C口
- 接口信号电平:高电平3.3V,低电平0V
- 模拟量输入范围:0~3.3V
- 板载LDO输出电压:3.3V
- 板载LDO输出电流:<500mA
- 尺寸:33mm*42.6mm
引脚说明
引脚说明
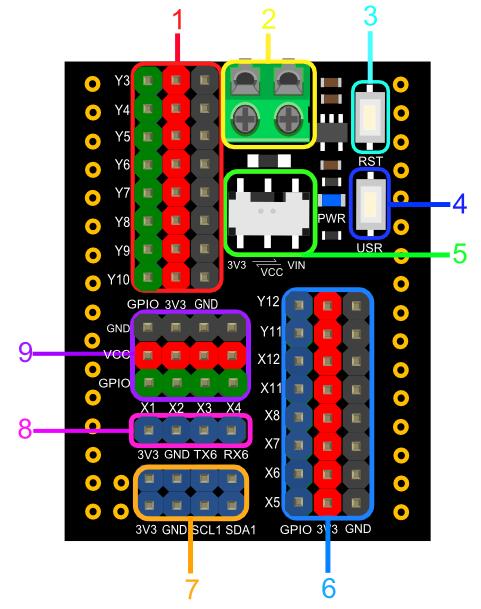
| 标号 | 名称 | 功能描述 |
|---|---|---|
| 1 | 数字端口 | 外接Gravity系列的数字传感器或模块,端口供电电压3.3V 引出管脚:Y3~Y10 |
| 2 | 外接电源口 | 用于外接供电,供电电压:5~12V |
| 3 | 复位按键 | 用以Pyboard主板复位,按一下即可复位 |
| 4 | USR按键 | 与主板的USR按键功能一致 |
| 5 | 电源切换开关 | 此开关可选择X1~X4这四个端口的供电电压为3.3V还是外接供电VIN |
| 6 | 模拟端口 | 外接Gravity系列的模拟传感器或模块,端口供电电压3.3V引出管脚:X5~X8、X11、X12、Y11、Y12 |
| 7 | I2C端口 | 外接Gravity系列的I2C传感器或模块,端口供电电压3.3V**引出管脚:X9、X10(I2C 1) ** |
| 8 | UART端口 | 外接Gravity系列的串口传感器或模块,端口供电电压3.3V**引出管脚:Y1、Y2(UART 6) ** |
| 9 | 数字端口(大电流) | 专用于驱动电机、舵机等大功率元件,端口供电电压:3.3V或VIN(可通过电源切换开关选择**引出管脚:X1~X4 ** |
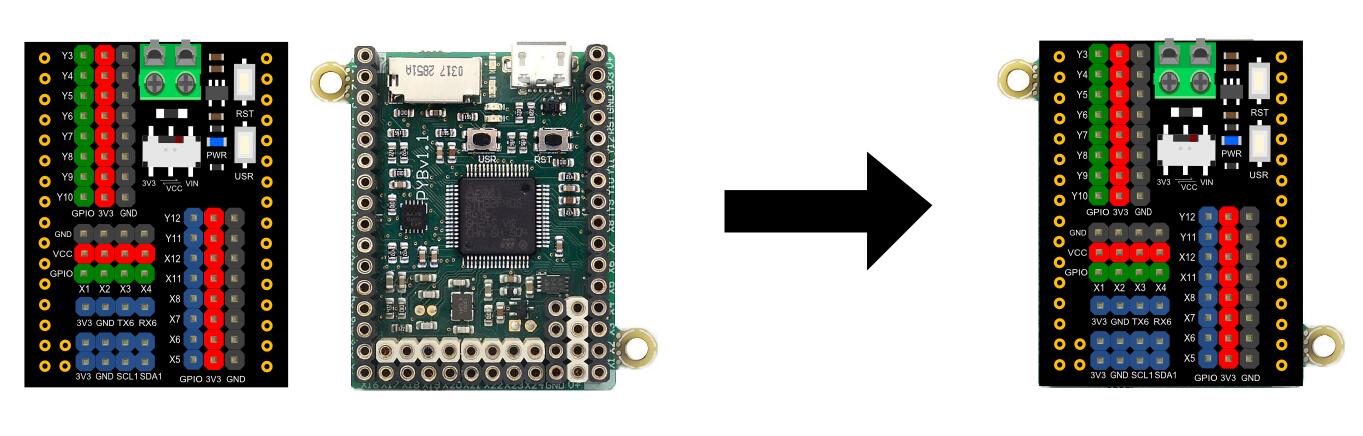
扩展板插入方向
扩展板插到主板时,请注意方向,不要插反。扩展板插到主板上后,扩展板的接线柱应与主板的USB接口在同一侧,如下图所示。
使用教程
本教程以2个案例来演示如何使用这款扩展板。
第1个案例以模拟声音传感器为例,演示基本的连线操作,然后通过pyboard主板读取模拟量,感应声音的大小。
第2个案例以DMS-MG90 金属9g舵机为例,演示外接供电与电源开关的切换,然后通过pyboard主板控制舵机的转动。
目前我们已经写好了10款常用传感器与电子模块的软件库,点击打开链接。
准备
- 硬件
- 1 x pyboard主板
- 1 x Gravity: pyboard I/O传感器扩展板
- 1 x 3Pin传感器连接线(或若干杜邦线)
- 1 x micro USB数据线
- 1 x 模拟声音传感器或类似的传感器模块
- 1 x DMS-MG90 金属9g舵机或类似的舵机
- 软件
- uPyCraft IDE, 点击下载uPyCraft IDE。推荐使用uPyCraft IDE,简单方便。
- PuTTY, 点击下载PuTTY
案例1:模拟声音传感器
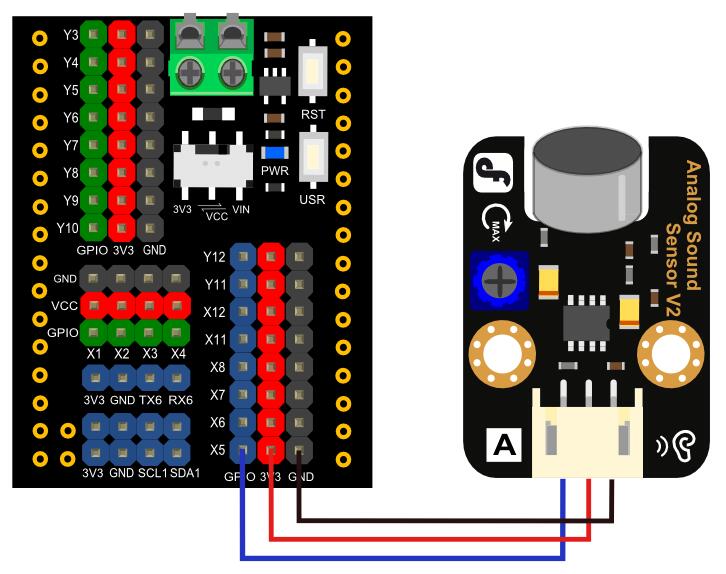
接线图
如下图所示,将传感器连接到扩展板上的X5端口。
样例代码
# Analog sound sensor is used to measure the sound.
# Hardware : analog sound sensor, pyboard v1.1
# connect:
# sensor pyboard
# VCC 3V3
# GND GND
# data X5
from pyb import ADC,Pin
import time
adc=ADC(Pin('X5')) # Connect sensor to 'X5'
while True:
val=adc.read() # Reed the analog value
print(val)
time.sleep(0.1)
结果
在uPyCraft IDE中复制上述代码,然后保存,再点击下载运行按钮,就能看到声音值了。
如下图所示,当有声音的时候,值会明显增大。

案例2:模拟舵机
接线图
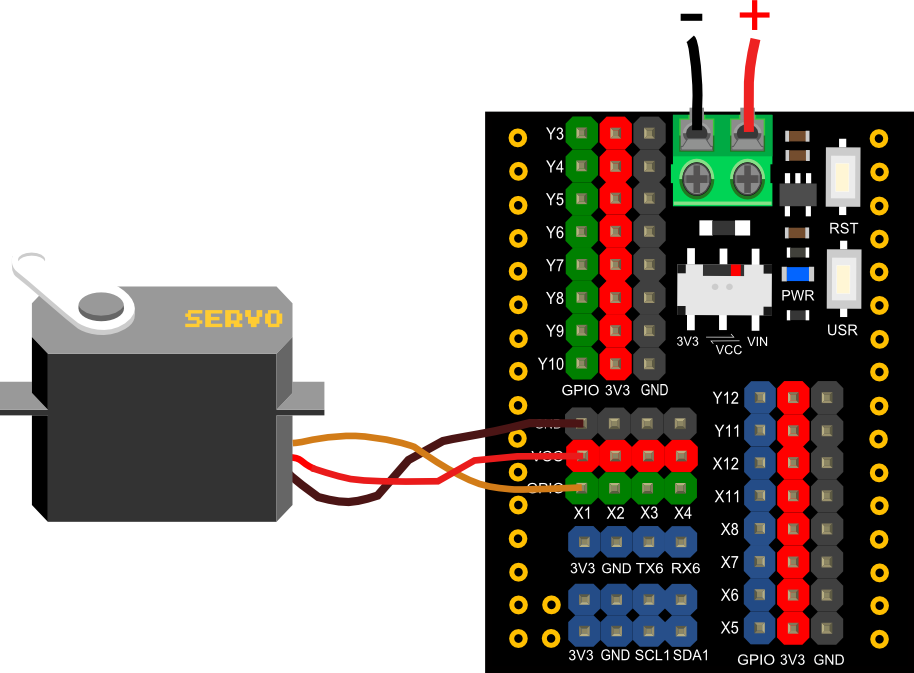
如下图所示,将模拟舵机接到扩展板上的X1端口
扩展板必须插入外接电源!电源切换开关必须拨到VIN处!
样例代码
# Hardware : Servo, PYBoard
# connect:
# Servo PYBoard
# VCC VCC
# GND GND
# DAT X1
import pyb
import time
s1=pyb.Servo(1) # create a servo object on position X1
while(True):
s1.angle(0)
time.sleep(1)
s1.angle(90)
time.sleep(1)
s1.angle(0)
time.sleep(1)
s1.angle(-90)
time.sleep(1)
结果
在uPyCraft IDE中复制上述代码,然后保存,再点击下载运行按钮,就可以看到舵机不断的旋转了。
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
更多
扩展板原理图
扩展板尺寸图
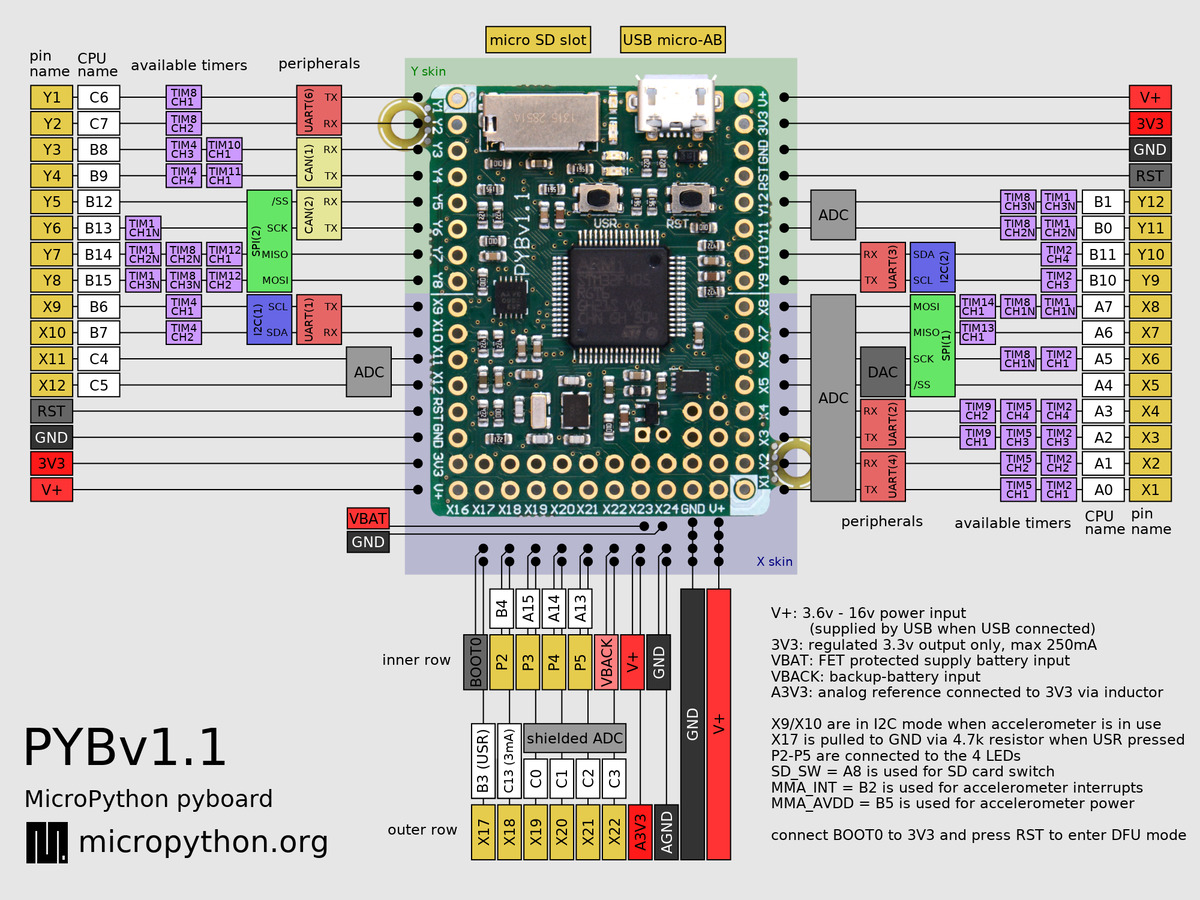
Pyboard V1.1管脚分布图
MicroPython官网
MicroPython官方参考文档
Gravity传感器与模块软件库(github)
uPyCraft IDE参考文档

{kind=link}
{kind=link}