简介
SEN0315手势识别传感器是一款强大的3D手势识别交互式传感器;在最远20cm范围内,最多可以识别13种手势。具备良好的手势识别稳定性和节能机制,总是能够在恰当的时候偷偷帮你节省电源;采用Gravity接口,零件的连接就不再是一件麻烦的事。目前有两种工作模式:高速模式下可以识别手的上\下\左\右\前\后\顺时针\逆时针移动以及快速挥动9种手势;低速模式下可以此前9种基础上再加乱序\缓慢左右\缓慢前后\缓慢上下移动4种手势。显然这款传感器可以有广泛的运用范围,设想一下,挥挥手控制电视空调;挥挥手调整灯光和音乐;挥挥手去操纵游戏...会不会很有意思呢?
技术规格
- 工作电压:3.3~5.5V
- 工作电流:3.5mA
- 通信接口:Gravity-I2C 4Pin
- I2C地址:0x73
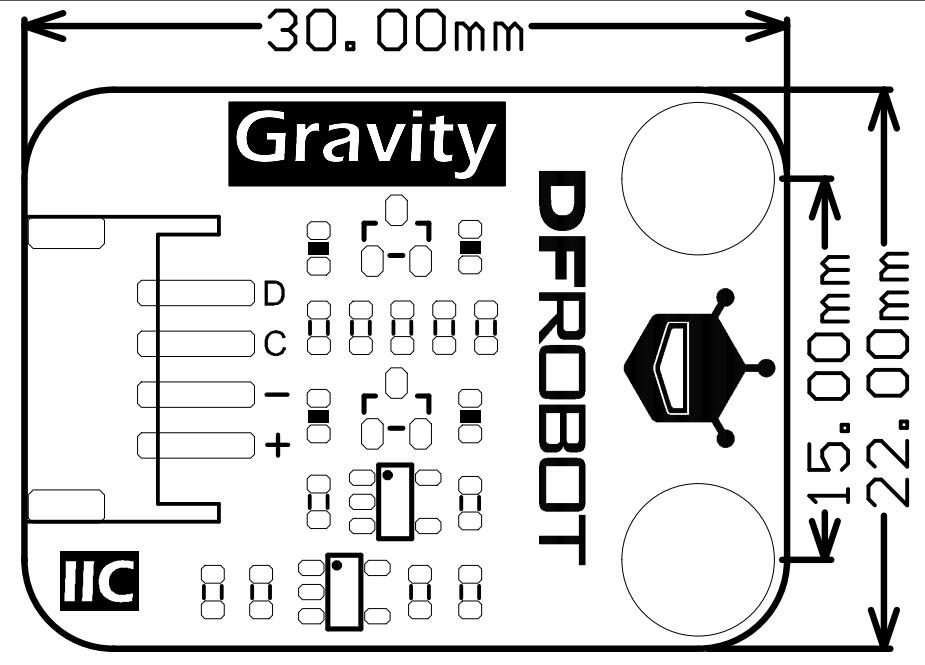
- 尺寸:30mmx22mm
- 安装孔尺寸:15mm
- 可识别距离:30mm~200mm
- 手势更新率:120Hz
- 工作温度:-40℃~85℃
- 环境光免疫力:<100k Lux
- 盖板材料:推荐采用玻璃或PC;透明度须>90%;盖板材料厚度<0.7mm;盖板和模块应尽可能靠近,最远距离为0.2mm;

引脚说明

| 丝印 | 功能描述 |
|---|---|
| D | I2C数据SDA |
| C | I2C时钟SCL |
| - | 电源负极 |
| + | 电源正极 |
使用教程
准备
- 硬件
- UNO x1
- IO 传感器拓展板 x1
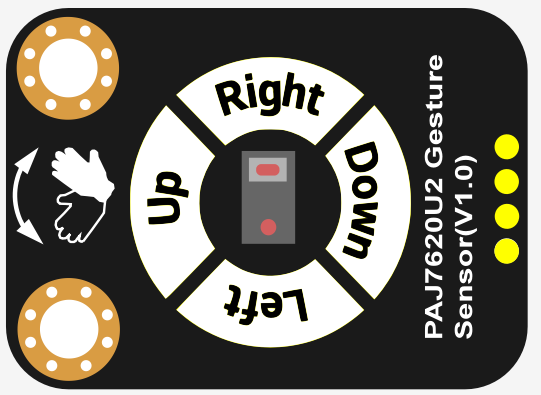
- PAJ7620U2手势识别传感器x1
- 软件
- Arduino IDE 点击下载Arduino IDE
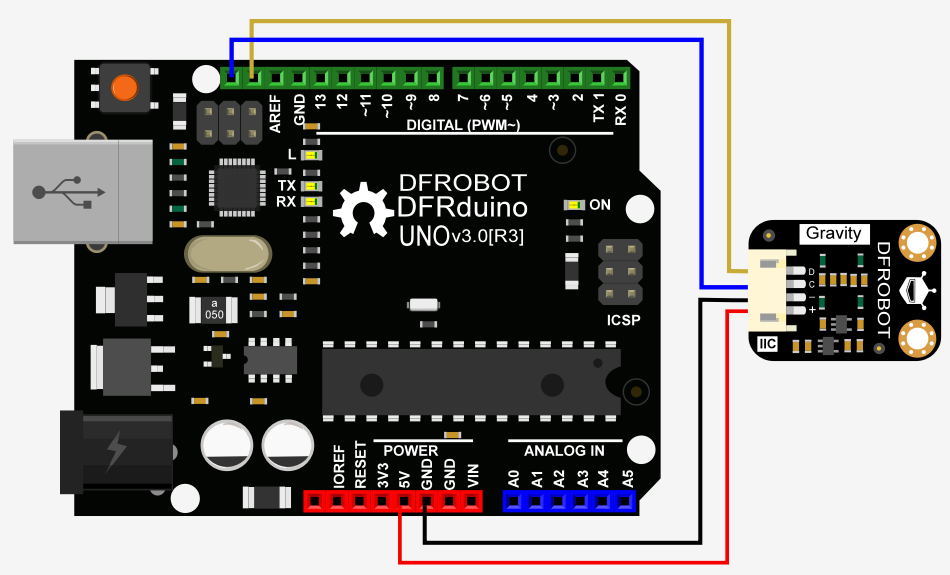
接线图
准备好硬件后,按照下图将模块与UNO连接好
样例代码
函数参考:
DFRobot_PAJ7620U2(TwoWire *pWire=&Wire);
/**
* @brief 构造函数
* @param mode 构造设备时,可以指定它的默认工作模式
*/
int begin(void)
/**
* @brief 初始化函数
* @return 返回0表示初始化成功,返回其他值表示初始化失败
*/
void setGestureHighRate(bool b);
/**
* @brief 设置告诉手势识别模式
* @param b true表示配置为高速识别模式,以最快速度识别手势并返回。
* @n false表示低速模式,在低速模式下,系统会做更多的判断
* @n 在高速识别模式下,可以快速识别的动作包括向左滑动 向右滑动 向上滑动 向下滑动
* @n 向前滑动 向后滑动 逆时针 顺时针 快速挥手 9个动作
* @n 高级用户如果想要用这些动作的组合,需要在外部自己算法逻辑,比如左右左快速挥手
* @n 因为每个人用到的动作有限 ,我们没有将更多的扩展动作集在库中,需要用户在ino文件中自己完成算法逻辑
* @n
* @n
* @n 在低速识别模式下,每2秒识别一个动作,我们将一些扩展动作集成到库内部,方便基础用户使用
* @n 可以识别的动作包括向左滑动 向右滑动 向上滑动 向下滑动 向前滑动 向后滑动
* @n 逆时针 顺时针 快速挥手 9个基础动作 左右慢挥手 上下慢挥手 前后慢挥手 乱序慢挥手 4个扩展动作
*/
String gestureDescription(eGesture_t gesture);
/**
* @brief 获取手势号码对应的字符串描述
* @param gesture 包含在eGesture_t中的手势号码
* @return 手势号码对应的文字描述信息,如果输入了手势表中不存在的手势,返回空字符串
* @n 正常的返回值可能是 "None","Right","Left", "Up", "Down", "Forward", "Backward", "Clockwise",
* @n "Anti-Clockwise", "Wave", "WaveSlowlyDisorder", "WaveSlowlyLeftRight", "WaveSlowlyUpDown",
* @n "WaveSlowlyForwardBackward"
*/
eGesture_t getGesture(void);
/**
* @brief 获取手势
* @return 返回手势,可能是的值为eGestureNone eGestureRight eGestureLeft eGestureUp
* @n eGestureDown eGestureForward eGestureBackward eGestureClockwise
* @n eGestureWave eGestureWaveSlowlyDisorder eGestureWaveSlowlyLeftRight
* @n eGestureWaveSlowlyUpDown eGestureWaveSlowlyForwardBackward
*/
高速模式:
代码功能:可以识别以下手势。

注:顺时针和逆时针手势需要至少转两圈以上 更多操作详见问答部分参考视频
| 高速模式可识别手势 | |
|---|---|
| gesture code | gesture dsctiption |
| 1 | Right |
| 2 | Left |
| 4 | Up |
| 8 | Down |
| 16 | Forward |
| 32 | Backward |
| 64 | Clockwise |
| 128 | Anti-clockwise |
| 256 | Wave(quickly) |
| the totality of recognizable gesture is 9 |
/*!
* @file GestureRecognize_HighRate.ino
* @brief Present the 9 built-in gestures data the sensor supports.
* @n Wave your hand above the sensor (within 0~20cm), it can recognize 9 kinds of gestures: move up, down, left, right, forward,
* @n backward, clockwise, anti-clockwise, wave.
* @n For more usages of the sensor, refer to the description about setGestureHighRate in function setup.
*
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author Alexander(ouki.wang@dfrobot.com)
* @version V1.0
* @date 2019-07-16
* @get from https://www.dfrobot.com
* @url https://github.com/DFRobot/DFRobot_PAJ7620U2
*/
#include <DFRobot_PAJ7620U2.h>
DFRobot_PAJ7620U2 paj;
void setup()
{
Serial.begin(115200);
delay(300);
Serial.println("Gesture recognition system base on PAJ7620U2");
while(paj.begin() != 0){
Serial.println("initial PAJ7620U2 failure! Please check if all the connections are fine, or if the wire sequence is correct?");
delay(500);
}
Serial.println("PAJ7620U2 init completed, start to test the gesture recognition function");
/*Set fast detection mode
*If the parameter is set to false, the module enters slow detection mode, and it detects one gesture every 2s. We have integrated
*some gestures inside the module to make it convenient for beginners.
*The slow mode can recognize 9 basic gestures and 4 expanded gestures: move left, right, up, down, forward, backward, clockwise,
*counter-clockwise, wave, slowly move left and right, slowly move up and down, slowly move forward and backward,
*wave slowly and randomly.
*
*
*
*If the parameter is set to true, the module enters fast detection mode.
*The fast mode can recognize 9 gestures: move left, right, up, down, forward, backward, clockwise, counter-clockwise, wave
*To detect the combination of these gestures, like wave left, right and left quickly, users needs to design their own algorithms logic.
*Since users only use limited gestures in this mode, we are not going to integrate too much expanded gestures in the library.
*If necessary, you can complete the algorithm logic in the ino file by yourself.
*/
paj.setGestureHighRate(true);
}
void loop()
{
/* Read gesture number(return eGesture_t enumerated type)
* eGestureNone eGestureRight eGestureLeft eGestureUp eGestureDown eGestureForward
* eGestureBackward eGestureClockwise eGestureAntiClockwise eGestureWave eGestureWaveSlowlyDisorder
* eGestureWaveSlowlyLeftRight eGestureWaveSlowlyUpDown eGestureWaveSlowlyForwardBackward
*/
DFRobot_PAJ7620U2::eGesture_t gesture = paj.getGesture();
if(gesture != paj.eGestureNone ){
/* Get the string descritpion corresponding to the gesture number.
* The string description could be
* "None","Right","Left", "Up", "Down", "Forward", "Backward", "Clockwise", "Anti-Clockwise", "Wave",
* "WaveSlowlyDisorder", "WaveSlowlyLeftRight", "WaveSlowlyUpDown", "WaveSlowlyForwardBackward"
*/
String description = paj.gestureDescription(gesture);//Convert gesture number into string description
Serial.println("--------------Gesture Recognition System---------------------------");
Serial.print("gesture code = ");Serial.println(gesture);
Serial.print("gesture description = ");Serial.println(description);
Serial.println();
}
}
结果
结果:可识别9种手势,可以在串口打印出相应的手势描述,如下图所示:

低速模式:
注:低速模式下默认采样时间为2s,所以完成一项操作后可能需等待1s 更多操作详见问答部分参考视频
代码功能:可以识别以下手势。
| 低速模式可识别手势 | |
|---|---|
| gesture code | gesture dsctiption |
| 1 | Right |
| 2 | Left |
| 3 | WaveSlowlyLeftRight |
| 4 | Up |
| 8 | Down |
| 12 | WaveSlowlyUpDown |
| 16 | Forward |
| 32 | Backward |
| 48 | WaveSlowlyForwardBackward |
| 64 | Clockwise |
| 128 | Anti-clockwise |
| 256 | Wave(quickly) |
| 512 | WaveSlowlyDisorder |
| the totality of recognizable gesture is 13 |
#include <DFRobot_PAJ7620U2.h>
/*!
* @file GestureRecognize_LowRate.ino
* @brief Present the 9 built-in gestures the sensor supports and 4 extended gestures in the slow mode.
* @n Wave you hand above the sensor(within 0~20cm), it can detect: move left, right, up, down, forward, backward, clockwise,
* @n anti-clockwise, wave, slowly move left and right, slowly move up and down, slowly move forward and backward, wave randomly and slowly.
* @n For more usages of the sensor, refer to the description about setGestureLowRate in function setup.
*
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author Alexander(ouki.wang@dfrobot.com)
* @version V1.0
* @date 2019-07-16
* @get from https://www.dfrobot.com
* @url https://github.com/DFRobot/DFRobot_PAJ7620U2
*/
#include <DFRobot_PAJ7620U2.h>
DFRobot_PAJ7620U2 paj;
void setup()
{
Serial.begin(115200);
delay(300);
Serial.println("Gesture recognition system base on PAJ7620U2");
while(paj.begin() != 0){
Serial.println("initial PAJ7620U2 failure! Please check if all the connections are fine, or if the wire sequence is correct?");
delay(500);
}
Serial.println("PAJ7620U2init completed, start to test the gesture recognition function");
/*Set fast detection mode
*If the parameter is set to false, the module enters slow detection mode, and it detects one gesture every 2s. We have integrated
*some gestures inside the module to make it convenient for beginners.
*The slow mode can recognize 9 basic gestures and 4 expanded gestures: move left, right, up, down, forward, backward, clockwise,
*counter-clockwise, wave, slowly move left and right, slowly move up and down, slowly move forward and backward,
*wave slowly and randomly.
*
*
*
*If the parameter is set to true, the module enters fast detection mode.
*The fast mode can recognize 9 gestures: move left, right, up, down, forward, backward, clockwise, counter-clockwise, wave.
*To detect the combination of these gestures, like wave left, right and left quickly, users needs to design their own
*algorithms logic.
*Since users only use limited gestures in this mode, we are not going to integrate too much expanded gestures in the library.
*If necessary, you can complete the algorithm logic in the ino file by yourself.
*/
paj.setGestureHighRate(false);
}
void loop()
{
/* Read gesture number(return eGesture_t enumerated type)
* eGestureNone eGestureRight eGestureLeft eGestureUp eGestureDown eGestureForward
* eGestureBackward eGestureClockwise eGestureAntiClockwise eGestureWave eGestureWaveSlowlyDisorder
* eGestureWaveSlowlyLeftRight eGestureWaveSlowlyUpDown eGestureWaveSlowlyForwardBackward
*/
DFRobot_PAJ7620U2::eGesture_t gesture = paj.getGesture();
if(gesture != paj.eGestureNone ){
/* Get the string descritpion corresponding to the gesture number
* The string description could be
* "None","Right","Left", "Up", "Down", "Forward", "Backward", "Clockwise", "Anti-Clockwise", "Wave",
* "WaveSlowlyDisorder", "WaveSlowlyLeftRight", "WaveSlowlyUpDown
}
}
结果
结果:可识别13手势,可以在串口打印出相应的手势描述,如下图所示:

Mind+ 上传模式编程
1、下载及安装软件,版本不低于1.6.2 RC2.0。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、切换到“上传模式”。详细教程:Mind+基础wiki教程-上传模式编程流程
3、“扩展”中选择“主控板”中的“Arduino Uno”,“扩展”“传感器”中搜索选择“PAJ7620U2手势识别传感器” 。详细教程:Mind+基础wiki教程-加载扩展库流程
4、进行编程,程序如下图。
5、菜单“连接设备”,“上传到设备”
6、程序上传完毕后,打开串口即可看到数据输出。详细教程:Mind+基础wiki教程-串口打印


Mind+ Python模式编程(行空板)
Mind+Python模式为完整Python编程,因此需要能运行完整Python的主控板,此处以行空板为例说明
连接图
操作步骤
1、下载及安装官网最新软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、切换到“Python模式”。“扩展”中选择“官方库”中的“行空板”和“pinpong库”中的”pinpong初始化“和“PAJ7620U2手势识别传感器”。切换模式和加载库的详细操作链接
3、进行编程
4、连接行空板,程序点击运行后,可在终端查看数据。行空板官方文档-行空板快速上手教程 (unihiker.com)

代码编程
以pinpong库为例,行空板官方文档-行空板快速上手教程 (unihiker.com)
# -*- coding: UTF-8 -*-
# MindPlus
# Python
from pinpong.libs.dfrobot_paj7620u2 import PAJ7620U2
from pinpong.board import Board
Board().begin()
p_paj7620u2 = PAJ7620U2()
p_paj7620u2.set_gesture_high_rate()
while True:
gesture = p_paj7620u2.get_gesture()[1]
if gesture == p_paj7620u2.gesture_right:
print("向右")
if gesture == p_paj7620u2.gesture_left:
print("向左")
常见问题
问:有高速模式演示视频吗?
答:https://www.bilibili.com/video/av76484181
问:有低速模式演示视频吗?
答:https://www.bilibili.com/video/av76484092
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖!
