简介
新型771RGB软屏,采用7*71颗灯珠组成,主要用于背包、酒瓶、衣服、腰带、表带、帽子、手镯;该LED柔性屏软屏,灯珠紧凑美观,亮度高,性能稳定,板面简洁,美观,生产方便,故障率低,是灯饰亮化的理想设计选择。
技术规格
- 安装方式: 镶嵌式
- 额定电流: 140(mA)
- 工作电压:5.0V
- 分辨率 7x71点
- 模块尺寸:269mm x 30mm
- 屏幕尺寸: 230.75x22.75mm(mm)
- 可显示颜色:红、黄、绿、青、兰、紫、白、黑
- 控制方式:串口通信
引脚说明

| 名称 | 功能描述 |
| VCC | 电源正极 |
| GND | 电源负极 |
| RX | 串口输入 |
| TX | 串口输出 |
引脚说明
函数库列表
设置显示信息
函数原型:void displayMessage(const char *message_)
- 函数功能:在软屏上显示字符(字母、数字)
- 参 数:
- *message_:字符串,使用 "" 括起来,参数为字母、数字
例:
#include <Arduino.h>
#include <HardwareSerial.h>
#include <SoftwareSerial.h>
#include "DFRobot_SerialScreen771.h"
#ifdef ARDUINO_AVR_UNO
SoftwareSerial Serial1(2, 3); //RX, TX
#endif
DFRobot_SerialScreen771 screen(Serial1);
void setup() {
/*Initialize communication interface (Serial1) and debug interface (Serial)*/
Serial.begin(115200);
Serial1.begin(19200);
screen.begin();
/*Display string "DFRobot"*/
screen.displayMessage("DFRobot");
}
void loop() {
}
设置信息列表
函数原型:bool setMessageList(uint8_t banN, const char *message_);bool setMessageList(eBanner_t banN, const char *message_);
- 函数功能:设置8个信息列表
- 参 数:
- banN:序号
- *message_:列表信息
例:
#include <Arduino.h>
#include <HardwareSerial.h>
#include <SoftwareSerial.h>
#include "DFRobot_SerialScreen771.h"
#ifdef ARDUINO_AVR_UNO
SoftwareSerial Serial1(2, 3); //RX, TX
#endif
DFRobot_SerialScreen771 screen(Serial1);
const char *s = "DFRobot";
const char* M1 = "DFRobot"; //"A"
const char* M2 = "<CRY>DFRobot"; //"B"
const char* M3 = "Hi!"; //"C"
const char* M4 = "<CRY>Hello!"; //"D"
const char* M5 = "World!"; //"E"
const char* M6 = "66"; //"F"
const char* M7 = "77"; //"G"
const char* M8 = "88"; //"H"
void setup() {
/*Initialize communication interface (Serial1) and debug interface (Serial)*/
Serial.begin(115200);
Serial1.begin(19200);
screen.begin();
/*Send 8 information lists to the serial screen*/
screen.setMessageList(1 << 0, M1);
screen.setMessageList(1 << 1, M2);
screen.setMessageList(1 << 2, M3);
screen.setMessageList(1 << 3, M4);
screen.setMessageList(1 << 4, M5);
screen.setMessageList(1 << 5, M6);
screen.setMessageList(1 << 6, M7);
screen.setMessageList(1 << 7, M8);
/* Prints a list of "DFRobot" in the message list, and the data of the M0 message list*/
screen.displayBanner(1 << 0);
/*Print data of M8 information list*/
//screen.displayBanner(1 << 7);
/*Print data for M1 and M8 information lists*/
//screen.displayBanner(1 << 0 | 1 << 7);
/*Display all information lists for M1~M8*/
//screen.displayBanner(1 << 0 | 1 << 1 | 1 << 2 | 1 << 3 | 1 << 4 | 1 << 5 | 1 << 6 | 1 << 7);
}
void loop() {
}
设置移动方式
函数原型:bool setMoveMode(eMoveMode_t m_);
-
函数功能:设置显示信息的移动方式
-
参 数:
- eMoveLeft:左移
- eMoveRight:右移
- eMoveHold:保持
- eMoveDown:下移
- eMoveUp:上移
- eMoveFlash:闪烁
例:
#include <Arduino.h>
#include <HardwareSerial.h>
#include <SoftwareSerial.h>
#include "DFRobot_SerialScreen771.h"
#ifdef ARDUINO_AVR_UNO
SoftwareSerial Serial1(2, 3); //RX, TX
#endif
DFRobot_SerialScreen771 screen(Serial1);
void setup() {
/*Initialize communication interface (Serial1) and debug interface (Serial)*/
Serial.begin(115200);
Serial1.begin(19200);
screen.begin();
delay(5);
/*Display string "DFRobot"*/
screen.displayMessage("DFRobot");
/*Set the move mode to hold*/
/*eMoveMode_t: eMoveLeft = left
eMoveRight = right
eMoveHold = hold
eMoveDown = down
eMoveUp = up
eMoveFlash = flash
*/
screen.setMoveMode(screen.eMoveHold);
}
void loop() {
/*Switch a mobile display mode every 5s*/
DFRobot_SerialScreen771::eMoveMode_t buf[]= {screen.eMoveLeft,screen.eMoveRight,screen.eMoveHold,screen.eMoveDown,screen.eMoveUp,screen.eMoveFlash};
for(int i = 0; i < sizeof(buf)/sizeof(DFRobot_SerialScreen771::eMoveMode_t); i++){
screen.setMoveMode(buf[i]);
delay(5000);
}
}
设置移动速度
函数原型:bool setMoveSpeed(eSpeedLevel_t s_)
-
函数功能:移动速度
-
参 数:
- eSpeedLevel_1:Speed class 1
- eSpeedLevel_2:Speed class 2
- eSpeedLevel_3:Speed class 3
- eSpeedLevel_4:Speed class 4
- eSpeedLevel_5:Speed class 5
- eSpeedLevel_6:Speed class 6
- eSpeedLevel_7:Speed class 7
- eSpeedLevel_8:Speed class 8
例:
#include <Arduino.h>
#include <HardwareSerial.h>
#include <SoftwareSerial.h>
#include "DFRobot_SerialScreen771.h"
#ifdef ARDUINO_AVR_UNO
SoftwareSerial Serial1(2, 3); //RX, TX
#endif
DFRobot_SerialScreen771 screen(Serial1);
void setup() {
/*Initialize communication interface (Serial1) and debug interface (Serial)*/
Serial.begin(115200);
Serial1.begin(19200);
screen.begin();
delay(5);
/*Display string "DFRobot"*/
screen.displayMessage("DFRobot");
/*Set the display's movement mode to shift left*/
screen.setMoveMode(screen.eMoveLeft);
/*Set the displayed moving speed level*/
/*eBrightLevel_t: eSpeedLevel_1 = Speed class 1
eSpeedLevel_2 = Speed class 2
eSpeedLevel_3 = Speed class 3
eSpeedLevel_4 = Speed class 4
eSpeedLevel_5 = Speed class 5
eSpeedLevel_6 = Speed class 6
eSpeedLevel_7 = Speed class 7
eSpeedLevel_8 = Speed class 8
*/
screen.setMoveSpeed(screen.eSpeedLevel_1);
}
void loop() {
}
设置显示亮度
函数原型:bool setBrightness(eBrightLevel_t b_)
-
函数功能:设置背光亮度
-
参 数:
- eBrightLevel_1:Brightness level 1
- eBrightLevel_2:Brightness level 2
- eBrightLevel_3:Brightness level 3
- eBrightLevel_4:Brightness level 4
- eBrightLevel_5:Brightness level 5
- eBrightLevel_6:Brightness level 6
- eBrightLevel_7:Brightness level 7
- eBrightLevel_8:Brightness level 8
例:
#include <Arduino.h>
#include <HardwareSerial.h>
#include <SoftwareSerial.h>
#include "DFRobot_SerialScreen771.h"
#ifdef ARDUINO_AVR_UNO
SoftwareSerial Serial1(2, 3); //RX, TX
#endif
DFRobot_SerialScreen771 screen(Serial1);
void setup() {
// Initialize communication interface (Serial1) and debug interface (Serial)
Serial.begin(115200);
Serial1.begin(19200);
screen.begin();
// Display string "DFRobot"
screen.displayMessage("DFRobot");
// Set the brightness level of the display
/*eBrightLevel_t: eBrightLevel_1 = Brightness level 1
eBrightLevel_2 = Brightness level 2
eBrightLevel_3 = Brightness level 3
eBrightLevel_4 = Brightness level 4
eBrightLevel_5 = Brightness level 5
eBrightLevel_6 = Brightness level 6
eBrightLevel_7 = Brightness level 7
eBrightLevel_8 = Brightness level 8
*/
screen.setBrightness(screen.eBrightLevel_1);
}
void loop() {
}
设置显示颜色
函数原型:bool setDispalyColor(eColorMode_t font, eColorMode_t shading);
- 函数功能:设置显示颜色(字体颜色、背景颜色)
- 参 数:
- oeColorMode_t font:字体颜色
- eColorMode_t shading:字体底纹
- eColorRed:红色
- eColorYellow:黄色
- eColorGreen:绿色
- eColorCyan:青色
- eColorBlue:蓝色
- eColorPurple:紫色
- eColorWhite:白色
- eColorBlack:黑色
例:
#include <Arduino.h>
#include <HardwareSerial.h>
#include <SoftwareSerial.h>
#include "DFRobot_SerialScreen771.h"
#ifdef ARDUINO_AVR_UNO
SoftwareSerial Serial1(2, 3); //RX, TX
#endif
DFRobot_SerialScreen771 screen(Serial1);
void setup() {
/*Initialize communication interface (Serial1) and debug interface (Serial)*/
Serial.begin(115200);
Serial1.begin(19200);
screen.begin();
delay(5);
/*Display string "DFRobot"*/
screen.displayMessage("DFRobot");
/*Set the string to display the background and font color, set it to red on the black background*/
screen.setDispalyColor(screen.eColorRed, screen.eColorBlack);
}
void loop() {
/*Switch one font color every 5s*/
DFRobot_SerialScreen771::eColorMode_t backgroud,font;
backgroud = screen.eColorBlack;
DFRobot_SerialScreen771::eColorMode_t buf[]= {screen.eColorRed, screen.eColorYellow, screen.eColorGreen, screen.eColorCyan, screen.eColorBlue, screen.eColorPurple, screen.eColorWhite};
for(int i = 0; i < sizeof(buf)/sizeof(DFRobot_SerialScreen771::eColorMode_t); i++){
font = buf[i];
screen.setDispalyColor(font, backgroud);
delay(5000);
}
}
设置全屏颜色
函数原型:bool setFullScreenColor(eColorMode_t color_);
- 函数功能:设置全屏显示颜色
- 参 数:
- eColorRed:红色
- eColorYellow:黄色
- eColorGreen:绿色
- eColorCyan:青色
- eColorBlue:蓝色
- eColorPurple:紫色
- eColorWhite:白色
- eColorBlack:黑色
例:
#include <Arduino.h>
#include <SoftwareSerial.h>
#include "DFRobot_SerialScreen771.h"
#ifdef ARDUINO_AVR_UNO
SoftwareSerial Serial1(2, 3); //RX, TX
#endif
DFRobot_SerialScreen771 screen(Serial1);
void setup() {
/*Initialize communication interface (Serial1) and debug interface (Serial)*/
Serial.begin(115200);
Serial1.begin(19200);
screen.begin();
/*Set screen color*/
/*eColorMode_t: eColorRed = red
eColorYellow = yellow
eColorGreen = green
eColorCyan = cyan
eColorBlue = blue
eColorPurple = purple
eColorWhite = white
eColorBlack = black
*/
screen.setFullScreenColor(screen.eColorBlack);
}
void loop() {
/*Switch one screen color every 5s*/
DFRobot_SerialScreen771::eColorMode_t buf[]= {screen.eColorRed, screen.eColorYellow, screen.eColorGreen, screen.eColorCyan, screen.eColorBlue, screen.eColorPurple, screen.eColorWhite,screen.eColorBlack};
for(int i=0; i < sizeof(buf)/sizeof(DFRobot_SerialScreen771::eColorMode_t); i++){
screen.setFullScreenColor(buf[i]);
delay(5000);
}
}
Arduino平台应用
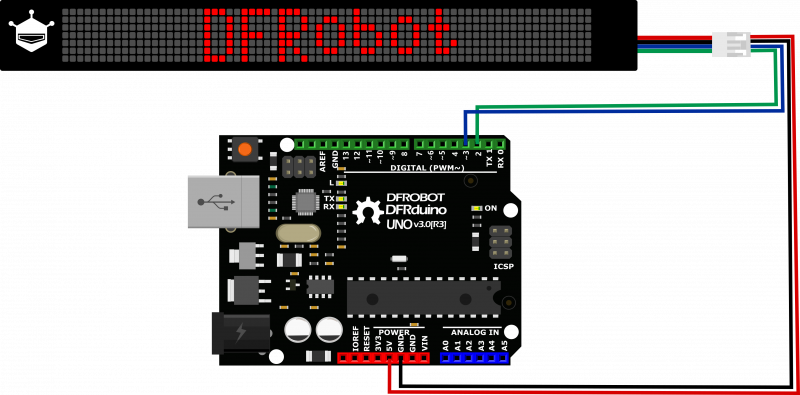
按照引脚说明连接好硬件,并下载样例代码到UNO中,上传成功,即可看到软屏的彩色显示效果。
准备
- 硬件
- 1 x DFRduino UNO控制板 购买链接
- 1 x 7x71 Flexible RGB LED Matrix
- 1 x 灯板转接线
- 软件
- Arduino IDE 点击下载Arduino IDE
接线图
样例代码
/*!
* file SerialScreen771.ino
*
* Copyright [DFRobot](https://www.dfrobot.com), 2016
* Copyright GNU Lesser General Public License
*
* version V1.1
* date 2022-1-24
*/
#include <Arduino.h>
#include <HardwareSerial.h>
#include <SoftwareSerial.h>
#include "DFRobot_SerialScreen771.h"
#ifdef ARDUINO_AVR_UNO
SoftwareSerial Serial1(2, 3); //RX, TX
#endif
DFRobot_SerialScreen771 screen(Serial1);
void setup() {
/*Initialize communication interface (Serial1) and debug interface (Serial)*/
Serial.begin(115200);
Serial1.begin(19200);
screen.begin();
/*Set the brightness level of the display*/
screen.setBrightness(screen.eBrightLevel_8);
/*Set the move mode to hold*/
screen.setMoveMode(screen.eMoveHold);
/*Display string "DFRobot"*/
screen.displayMessage("DFRobot");
/*Set the string to display the background and font color, set it to red on the black background*/
screen.setDispalyColor(screen.eColorRed, screen.eColorBlack);
}
void loop() {
}
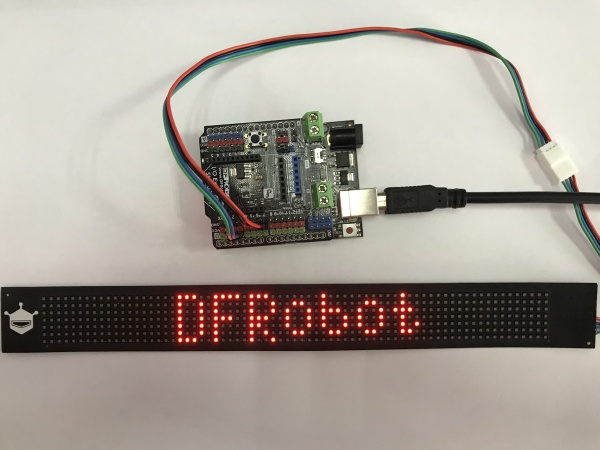
显示效果
Mind+(基于Scratch3.0)图形化编程
1、下载及安装软件。下载地址:https://mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、软件右上角切换开关,切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程
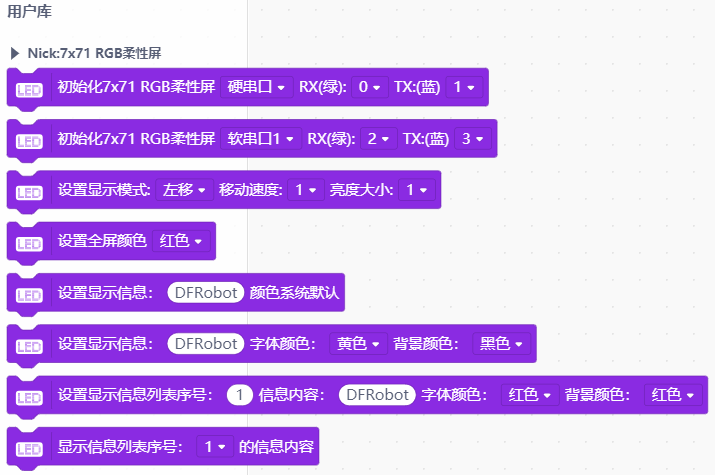
3、“扩展”中选择“主控板”中的“Arduino Uno”。“用户库”中搜索柔性屏并加载。 详细教程:Mind+基础wiki教程-加载扩展库流程
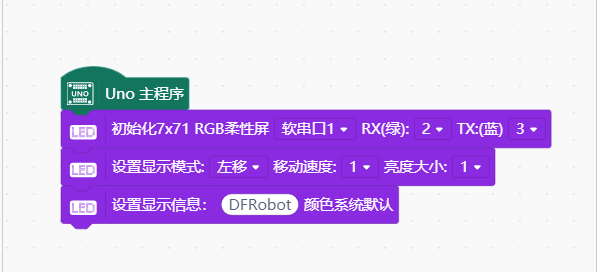
4、进行编程,程序如下图:
5、菜单“连接设备”,“上传到设备”
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
