简介
VL53L0X激光测距传感器是一款基于意法半导体(STMicroelectronics)新出的基于飞行时间测距 (ToF) 原理设计的高精度测距传感器。与传统的技术不同,VL53L0X无论目标反射率如何,都能提供精确的距离测量,最高测量距离2米。
DFRobot基于VL53L0X设计的Gravity传感器模块,提供Gravity-I2C接口,即插即用,支持3.3V~5V供电使用,兼容更多的主板,适应更多的应用场景。
VL53L0X集成了尖端的SPAD (Single Photon Avalanche Diodes) 阵列,并嵌入ST的第二代FlightSenseTM专利技术。精度达±3%,响应时间小于30ms,正常工作模式下功耗仅20mW,待机功耗为5uA。
VL53L0X的940nm VCSEL发射器(垂直腔面发射激光器)对人眼来说是完全不可见的,加上内部物理红外滤波器,它可以实现更远的距离,更强的抗环境光的能力,以及更好的覆盖玻璃光学截面。
技术规格
- 工作电压:3.3V-5V DC
- 激光波长:940nm
- 量程范围:30-2000mm
- 测距角度:25°
- 测距精度:±3%
- 测距时间:<= 30ms
- 工作温度:-20-70 ℃
- 接口类型:标准Gravity接口
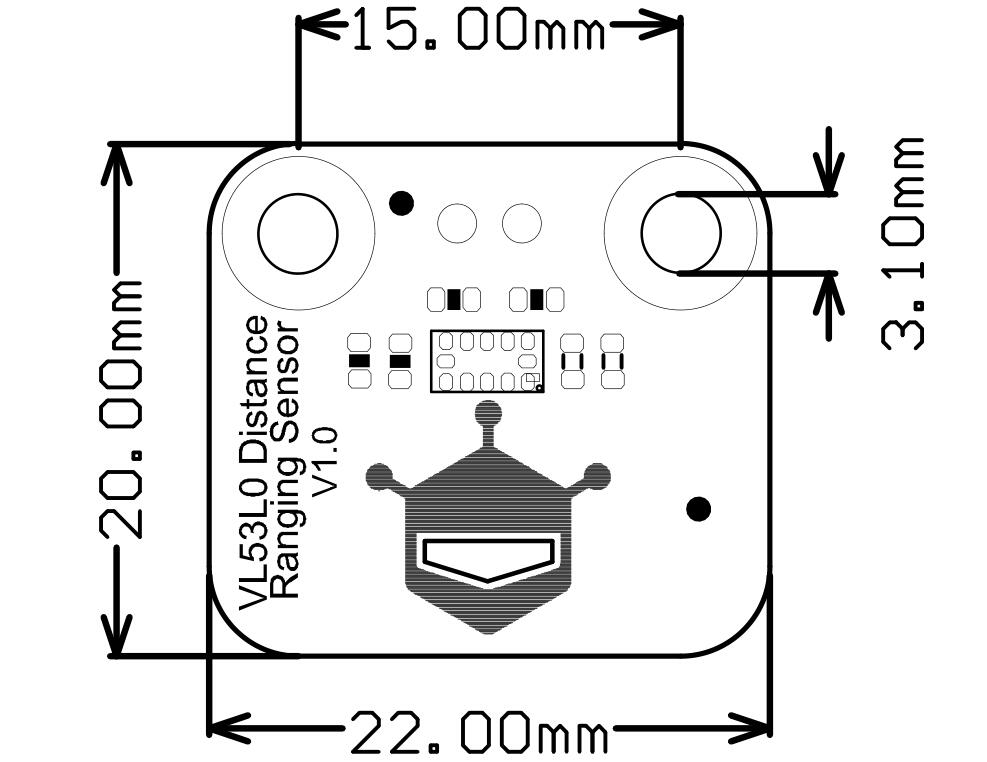
- 产品尺寸:20*22 mm
引脚说明
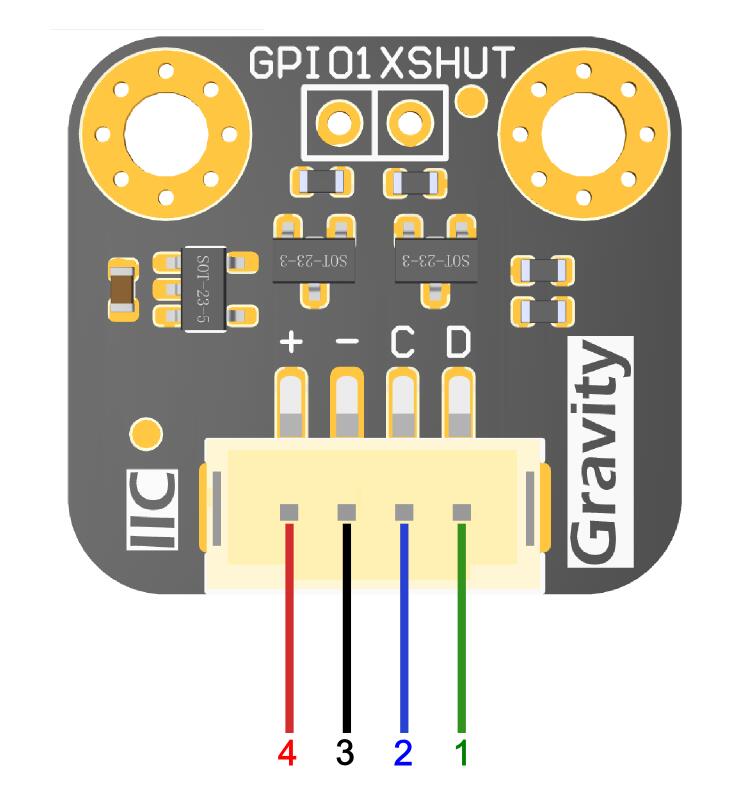
引脚描述
| 标号 | 名称 | 功能描述 |
|---|---|---|
| 1 绿线 | D | IIC数据线DATA |
| 2 蓝线 | C | IIC时钟线CLK |
| 3 黑线 | - | 电源负极GND |
| 4 红线 | + | 电源正极VCC |
- GPIO1:传感器中断输出引脚,用来指示数据是否准备好
- XSHUT:传感器关闭引脚,默认被拉高,当引脚被拉低时传感器进入关闭模式
使用教程
准备
硬件
- Arduino UNO控制板 x1
- VL53L0X Distance Ranging Sensor模块
软件
- Arduino IDE, 点击下载Arduino IDE
- 请先下载VL53L0 Distance Ranging Sensor Driver库
- 如何安装库文件,点击链接
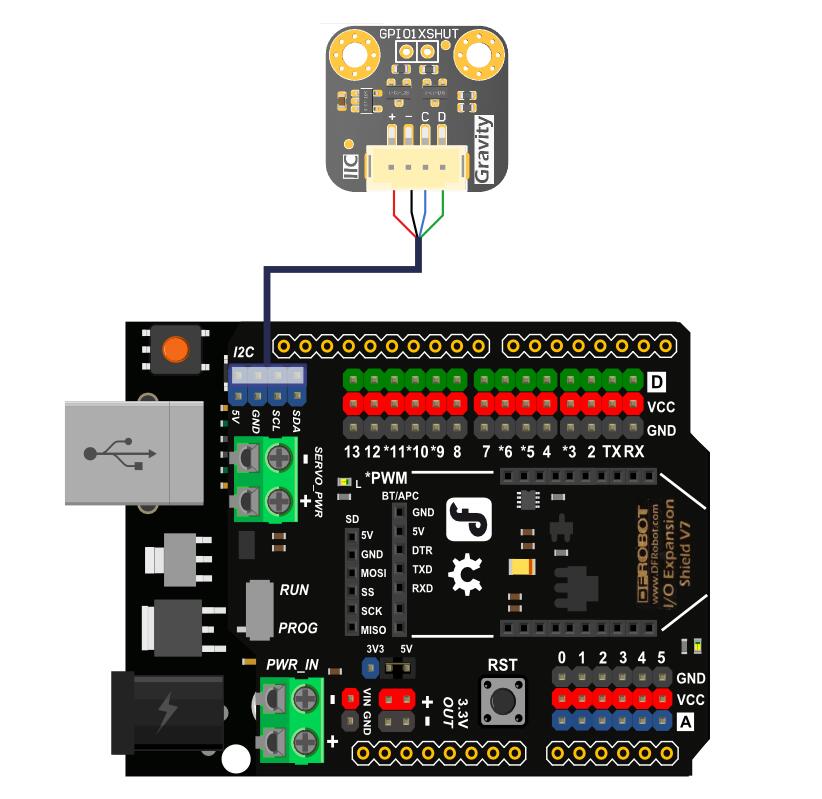
连接图
样例代码
/*!
@file DFRobot_VL53L0X.ino
@brief DFRobot's Laser rangefinder library
@n The example shows the usage of VL53L0X in a simple way.
@copyright [DFRobot](https://www.dfrobot.com), 2016
@copyright GNU Lesser General Public License
@author [LiXin]
@version V1.0
@date 2017-8-21
@https://github.com/DFRobot/DFRobot_VL53L0X
timer*/
#include "Arduino.h"
#include "Wire.h"
#include "DFRobot_VL53L0X.h"
/*****************Keywords instruction*****************/
//Continuous--->Continuous measurement model
//Single------->Single measurement mode
//High--------->Accuracy of 0.25 mm
//Low---------->Accuracy of 1 mm
/*****************Function instruction*****************/
//setMode(ModeState mode, PrecisionState precision)
//*This function is used to set the VL53L0X mode
//*mode: Set measurement mode Continuous or Single
//*precision: Set the precision High or Low
//void start()
//*This function is used to enabled VL53L0X
//float getDistance()
//*This function is used to get the distance
//uint16_t getAmbientCount()
//*This function is used to get the ambient count
//uint16_t getSignalCount()
//*This function is used to get the signal count
//uint8_t getStatus();
//*This function is used to get the status
//void stop()
//*This function is used to stop measuring
DFRobotVL53L0X sensor;
void setup() {
//initialize serial communication at 115200 bits per second:
Serial.begin(115200);
//join i2c bus (address optional for master)
Wire.begin();
//Set I2C sub-device address
sensor.begin(0x50);
//Set to Back-to-back mode and high precision mode
sensor.setMode(Continuous, High);
//Laser rangefinder begins to work
sensor.start();
}
void loop()
{
//Get the distance
Serial.print("Distance: "); Serial.println(sensor.getDistance());
//The delay is added to demonstrate the effect, and if you do not add the delay,
//it will not affect the measurement accuracy
delay(500);
}
测量结果
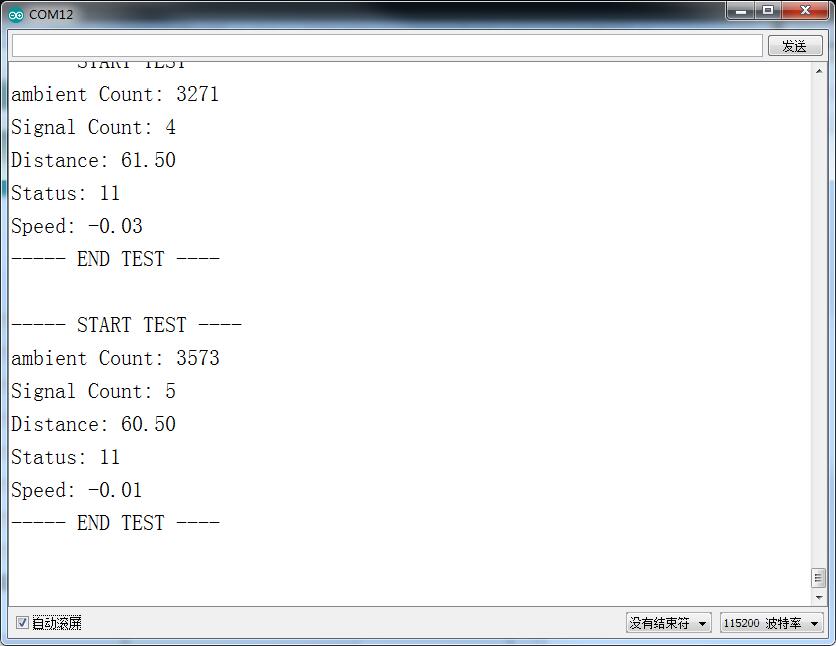
串口显示测量到的距离等信息
测量结果示意
测试数据表(单位:mm)

API列表
#include <DFRobot_EINK.h>
DFRobotVL53L0X sensor //创建一个VL53L0X对象
/*
@函数功能:设置测距模式。
@参数1 mode: 测距模式。
Single: 单次测距。
Continuous: 连续测距。
@参数2 precision: 测量精度
High: 高精度(0.25mm)。
Low: 标准精度(1mm)。
*/
void setMode(uint8_t mode, uint8_t precision);
/*
@函数功能:开始测量距离。
*/
void start();
/*
@函数功能:停止测量。
*/
void stop();
/*
@函数功能:获取距离。
*/
uint16_t getDistance();
/*
@函数功能:获取环境量。
*/
uint16_t getAmbientCount();
/*
@函数功能:获取信号数。
*/
uint16_t getSignalCount();
兼容性测试
| MCU | 测试通过 | 测试失败 | 未测试 | 特别标注 |
|---|---|---|---|---|
| FireBeetle-Board328P | √ | |||
| FireBeetle-ESP32 | √ | |||
| FireBeetle-ESP8266 | √ | |||
| Arduino UNO/ Leonardo/ Mega2560 | √ |
Mind+ 上传模式编程
- 下载及安装软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
- 切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程
- “扩展”中选择“主控板”中的“Arduino Uno”,“传感器”中加载“VL53L0X激光测距传感器”。 详细教程:Mind+基础wiki教程-加载扩展库流程
- 进行编程,程序如下图:
- 菜单“连接设备”,“上传到设备”
- 程序上传完毕后,打开串口即可看到数据输出。详细教程:Mind+基础wiki教程-串口打印
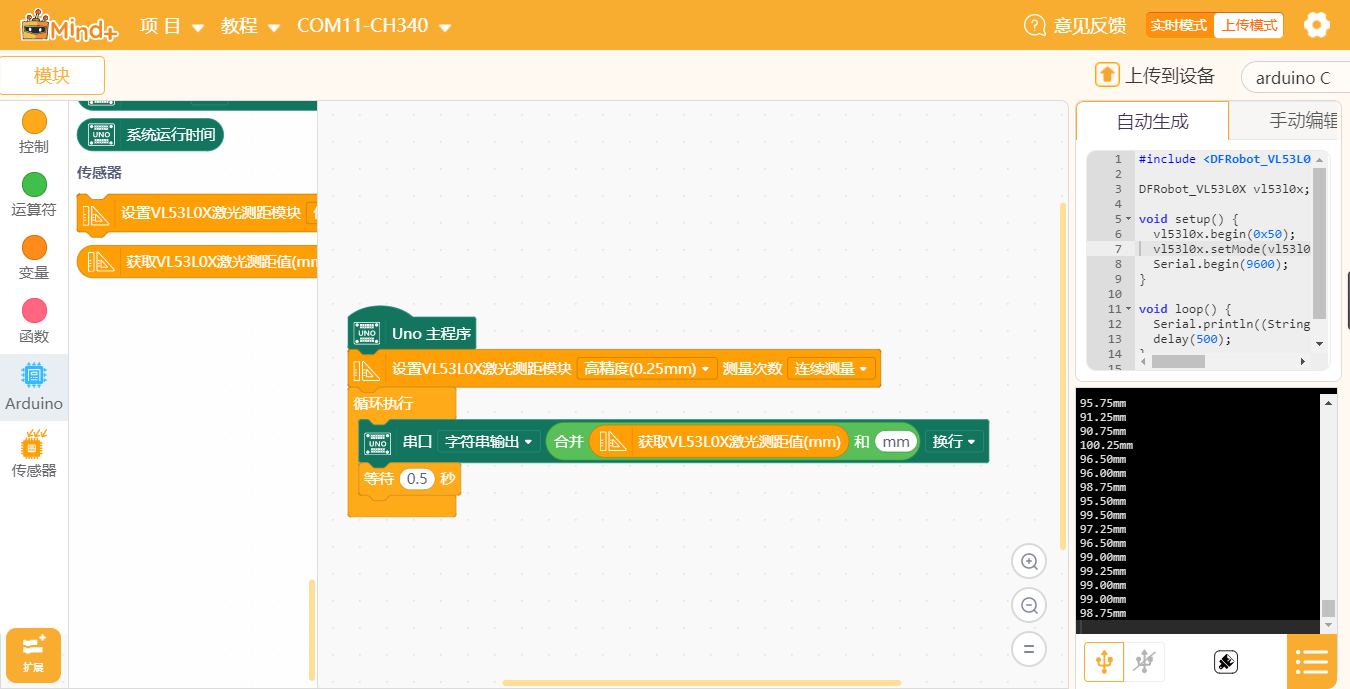
结果
打开串口监视器,将波特率调整到9600,移动传感器靠近物体,通过串口观察激光测距传感器测得的距离值。
Mind+ Python模式编程(行空板)
Mind+Python模式为完整Python编程,因此需要能运行完整Python的主控板,此处以行空板为例说明
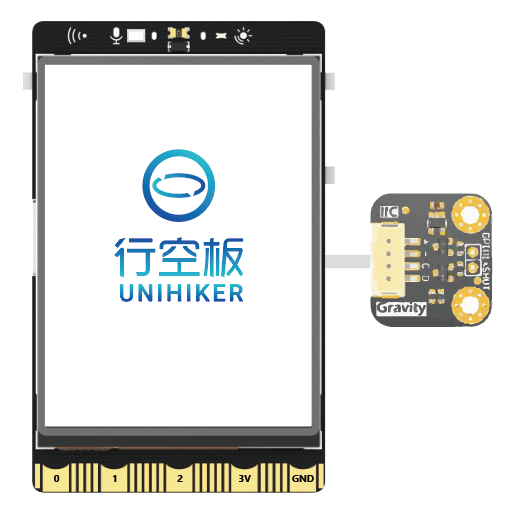
连接图
操作步骤
1、下载及安装官网最新软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、切换到“Python模式”。“扩展”中选择“官方库”中的“行空板”和“pinpong库”中的”pinpong初始化“和“VL53L0X激光测距传感器”。切换模式和加载库的详细操作链接
3、进行编程
4、连接行空板,程序点击运行后,可在终端查看数据。行空板官方文档-行空板快速上手教程 (unihiker.com)

代码编程
以pinpong库为例,行空板官方文档-行空板快速上手教程 (unihiker.com)
# -*- coding: UTF-8 -*-
# MindPlus
# Python
from pinpong.libs.dfrobot_vl53l0 import VL53L0
from pinpong.board import Board
import time
Board().begin()
p_vl53l0x = VL53L0()
p_vl53l0x.set_mode(p_vl53l0x.Continuous, p_vl53l0x.High)
while True:
print(p_vl53l0x.get_distance_mm())
time.sleep(1)
产品尺寸
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
