简介
NB-IoT是指基于蜂窝的窄带物联网(Narrow Band-Internet of Things)技术。它是IoT领域的一个新兴技术分支,支持低功耗设备在广域网的蜂窝数据连接,也称作低功耗广域网(LPWAN)。NB-IoT工作于授权频谱下,可以直接部署在GSM、UMTS、LTE网络,与现有网络共存,而带宽大约只消耗180KHz。
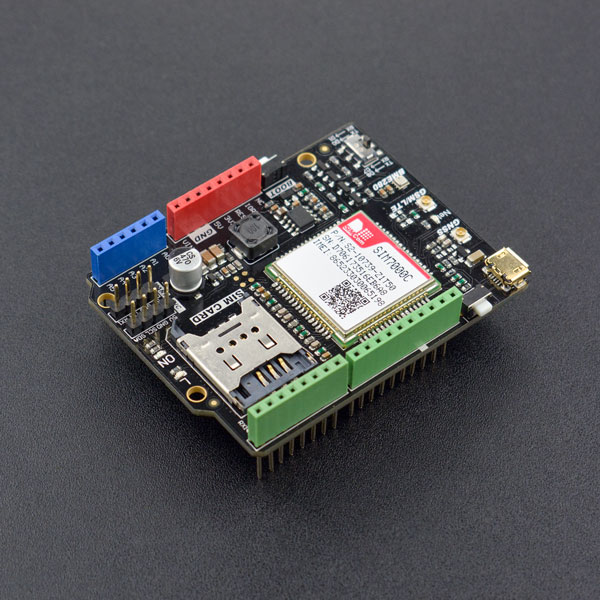
SIM7000 Arduino NB-IoT/LTE/GPRS 扩展板是DFRobot基于SIMCom SIM7000设计的无线通信模块,专为Arduino控制器设计,支持多频LTE-FDD,双频GPRS/EDGE,NB-IoT通信。这是国内第一款将NB-IoT技术引入到开源硬件领域的产品。无论是做原型开发,还是做小批量生产,SIM7000 Arduino NB-IoT/LTE/GPRS 扩展板都是低功耗,低延迟、中等吞吐量应用的最优解决方案。此外SIM7000板载GNSS全球导航卫星系统(Global Navigation Satellite System),支持美国的GPS,俄罗斯的GLONASS,欧洲的Galileo,日本的QZSS以及,中国自主研发的北斗导航系统。非常适用于远程控制,移动追踪,远程抄表,共享单车等物联网应用。
SIM7000 NB-IoT/LTE/GPRS 扩展板同时支持普通SIM卡和NB-IoT专用卡,可以插接普通SIM卡进行打电话、发短信等传统GSM应用,也可以插接NB-IoT专用卡,使用NB-IoT网络进行数据传输。此外扩展板还提供了BME280环境传感器,可以作为NB-IoT项目的原型机开发,可以监测温度,湿度及气压数值。
⚠SIM7000C适用于国内频段,SIM7000E适用于欧洲频段,请根据使用场景,谨慎选择对应产品!
⚠SIM7000系列扩展板在V2.0及后续版本,已去除板载BME280传感器!
性能描述
-
工作电压:5V(注意:模块在连接网络瞬间会消耗大量电流,工作时,需外接电源)
-
输入电压:7~12VDC (VIN端,极限6~20V)
-
通信模组:SIM7000
- Single-Band TDD-LTE B39
- Quad-Band FDD-LTE B1/B3/B5/B8 (SIM7000C)(已上架)
- Quad-Band FDD-LTE B3/B8/B20/B28 (SIM7000E)(已上架)
- GPRS/EDGE 900/1800 MHz
- Output power
- GSM900: 2W
- DCS1800: 1W
- Control Via AT Commands
- Operation temperature: -40℃ to +85℃
- GNSS (GPS, GLONASS, BeiDou, Compass, Galileo, QZSS)
- Firmware update via USB 2.0
-
支持普通SIM卡以及NB-IoT专用卡(注意:请先确认您的SIM频段是否包含在支持频段内)
-
BME280环境传感器(SIM7000系列扩展板在V2.0及后续版本,已去除板载BME280传感器)
- 温度检测范围:-40℃~+85℃,分辨率0.1℃,误差±0.5℃
- 湿度检测范围:0~100%RH,分辨率0.1%RH,误差±2%RH
- 压力检测范围:300~1100hPa
- 湿度测量响应时间:1s
-
工作温度:-30℃ ~ +80℃
-
尺寸:53.4 x 68.6mm
接口说明
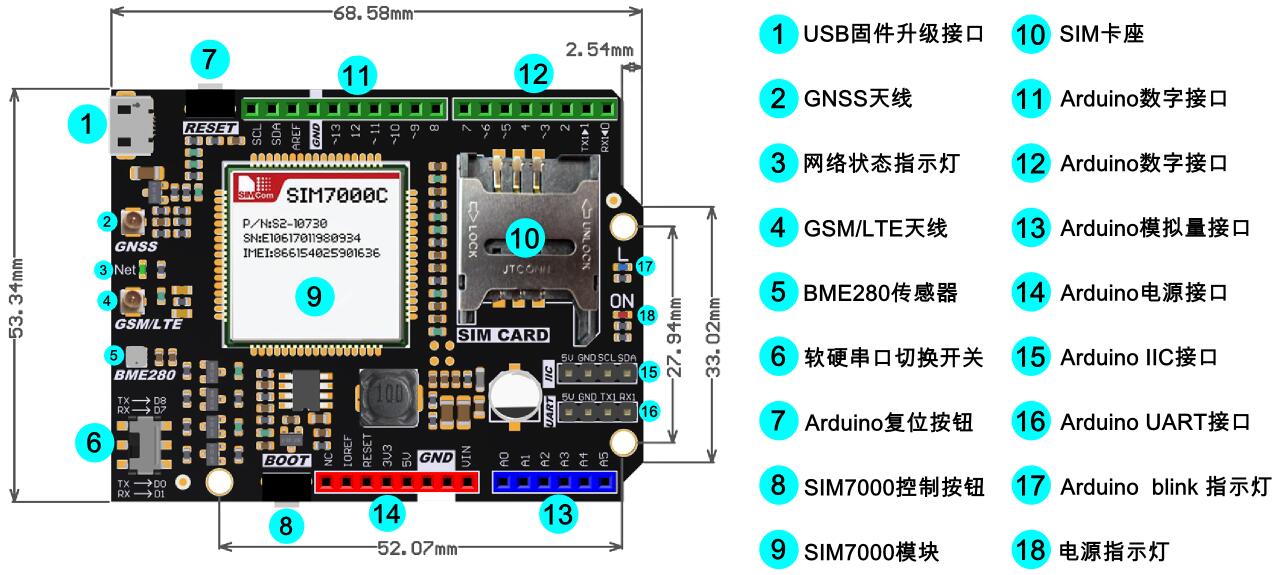
⚠注意:
- 软硬串口切换开关:由于Arduino UNO/Mega等控制器默认D0和D1为硬件串口,与USB端相连。很多需要使用串口的扩展板,在使用时会出现串口冲突的问题,所以特别设计了一个软串口接口,用户可以使用软串口与Arduino进行通信 扩展阅读:Arduino SoftwareSerial Library
- 为了方便程序控制,Boot按键默认引至D12引脚,可以通过拉高D12引脚2秒实现模块的开关机。SIM7000开机后会有2秒左右初始化时间,初始化完成后可正常使用。
使用教程(基于SIM7000库)
准备工作
-
硬件
- 1 x Arduino UNO控制板(可兼容LEONARDO和MEGA,请参考演示程序的注释做出相应改动)
- 1 x SIM7000 Arduino NB-IoT/LTE/GPRS 扩展板
- 1 x 为UNO下载程序的USB线
- 1 x 7V~12V直流电源
-
软件
- Arduino IDE, 点击下载Arduino IDE
- 请先下载DFRobot通用SIM库
- 请先下载NB-IOT SIM7000 Shield库
- 如何安装库文件,点击链接
硬件连接
将扩展板插在Arduino UNO控制器上

样例代码
- 由于Arduino UNO 只有一个硬件串口,使用时,推荐使用软串口通信,SIM7000库文件默认使用软串口,请将软硬件串口控制开关切换至TX>D8,RX>D7。
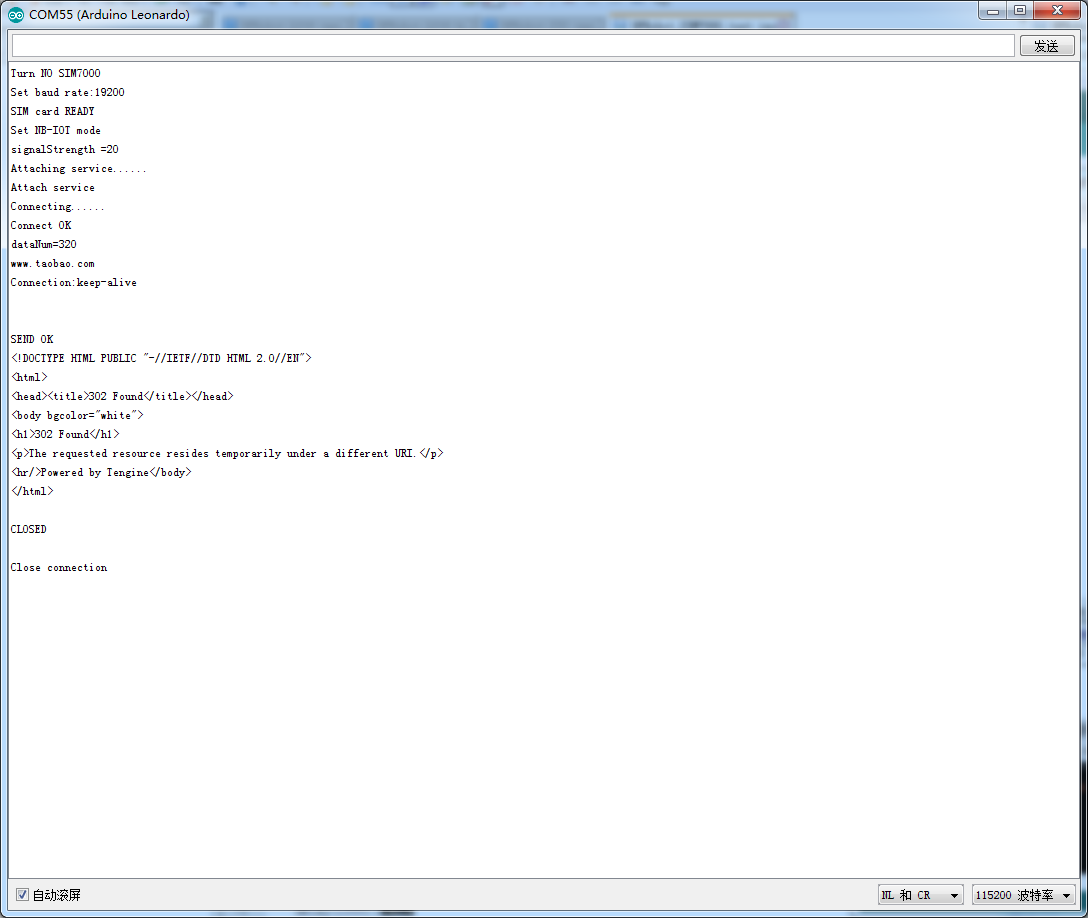
- 程序使用SIM7000通过GPRS连接网站并进行HTTP报文交互。
#include <Wire.h>
#include <DFRobot_SIM7000.h>
#define PIN_TX 7
#define PIN_RX 8
SoftwareSerial mySerial(PIN_RX, PIN_TX);
DFRobot_SIM7000 sim7000(&mySerial);
static char buff[350];
void setup() {
int signalStrength, dataNum;
Serial.begin(115200);
mySerial.begin(19200);
Serial.println("Turn ON SIM7000......");
if (sim7000.turnON()) { //Turn ON SIM7000
Serial.println("Turn ON !");
}
Serial.println("Set baud rate......");
if (sim7000.setBaudRate(19200)) { //Set baud rate from 115200 to 19200
Serial.println("Set baud rate:19200");
} else {
Serial.println("Faile to set baud rate");
while (1);
}
Serial.println("Check SIM card......");
if (sim7000.checkSIMStatus()) { //Check SIM card
Serial.println("SIM card READY");
} else {
Serial.println("SIM card ERROR");
while (1);
}
delay(500);
Serial.println("Set net mod......");
if (sim7000.setNetMode(sim7000.eNB)) { //Set net mod NB-IOT
Serial.println("Set NB mode");
} else {
Serial.println("Fail to set mode");
}
Serial.println("Get signal quality......");
delay(500);
signalStrength = sim7000.checkSignalQuality(); //Check signal quality from (0-30)
Serial.print("signalStrength =");
Serial.println(signalStrength);
delay(500);
Serial.println("Attaching service......");
if (sim7000.attacthService()) { //Open the connection
Serial.println("Attach service");
} else {
Serial.println("Fail to Attach service");
while (1);
}
delay(200);
Serial.println("Connecting......");
if (sim7000.openNetwork(sim7000.eTCP, "www.taobao.com", 80)) { //Start Up TCP or UDP Connection
Serial.println("Connect OK");
} else {
Serial.println("Fail to connect");
while (1);
}
sim7000.send("HEAD/HTTP/1.1\r\nHost:www.taobao.com\r\nConnection:keep-alive\r\n\r\n"); //Send Data Through TCP or UDP Connection
dataNum = sim7000.recv(buff, 350); //Receive data
Serial.print("dataNum=");
Serial.println(dataNum);
Serial.println(buff);
delay(500);
if (sim7000.closeNetwork()) { //End the connection
Serial.println("Close connection");
} else {
Serial.println("Fail to close connection");
}
delay(2000);
sim7000.turnOFF(); //Turn OFF SIM7000
}
void loop() {
delay(1000);
}
- 函数说明:
- 设置软串口,SIM7000采用软串口控制TX为D8 RX为D7。
begin(Stream &s_)
- 使用软件方式开启SIM7000,开启后扩展板上的Net指示灯闪烁,SIM7000有2秒左右初始化时间,初始化成功后函数返回true。
turnON();
- 使用软件方式关闭SIM7000,成功后扩展板上的Net指示灯熄灭。
turnOFF();
- 设置软串口波特率,SIM7000串口默认波特率为115200,使用软串口控制时为避免乱码将波特率设置为19200及以下,成功设置后返回true。(其他可设置值9600,4800,2400,1200)
setBaudRate(int rate);
- 初始化AT指令功能,成功后返回True。
checkSIMStatus();
- 设置网络模式,成功后返回true。可设置模式: GPRS:GPRS模式 NB:NB-IOT模式。
setNet(Net net);
- 检测信号强度,返回值为信号强度。返回值为99时表示无法检测到信号。
checkSignalQuality();
- 打开连接服务,成功后返回true。
attacthService();
- 连接网络,选择连接协议(TCP或者UDP),所连接的域名,端口号,连接成功后返回true。
connect(Protocol ptl,const char *host, int port);
- 数据传输,连接成功后向服务端发送信息,可指定发送信息大小,或直接输入需发送信息。
send(const char *str);
send(void* buf,size_t len);
- 数据接收,接收服务端的信息并存储,可设置最大接收量,和等待时间。返回实际接收字节数。
recv(char* buf,int maxlen,int timeout);
- 断开连接,成功后返回true。
close();
- 程序演示:
使用教程(基于串口AT指令)
准备工作
与上面的教程(基于SIM7000库)保持一致
硬件连接
与上面的教程(基于SIM7000库)保持一致
样例代码
- SIM7000 NB-IoT Shield可使用串口发送AT指令进行控制,SIM7000 NB-IoT Shield串口默认波特率为115200,需先将波特率设置为19200避免乱码。
- AT指令需以回车换行符结尾。代码如下:
/*
* File : DFRobot_SIM7000_ATtest.ino
* Power : SIM7000 needs 7-12V DC power supply
* Brief : This example use the serial port to send AT command to control the SIM7000
* With initialization completed, we can enter AT command to SIM7000 directly
* AT command list:
* https://github.com/DFRobot/binaryfiles/raw/master/DFR0505/doc/SIM7000%20Series_AT%20Command%20Manual_V1.01.pdf
* Note : If you use Mega please connect PIN8 PIN10 and set PIN_RX = 10
* The AT command must end with CRLF
*/
#include <DFRobot_SIM7000.h>
#define PIN_TX 7
#define PIN_RX 8
SoftwareSerial mySerial(PIN_RX,PIN_TX);
DFRobot_SIM7000 sim7000(&mySerial);
void setup() {
Serial.begin(115200);
mySerial.begin(19200);
Serial.println("Turn ON SIM7000......");
if(sim7000.turnON()){ //Turn ON SIM7000
Serial.println("Turn ON !");
}
Serial.println("Set baud rate......");
if(sim7000.setBaudRate(19200)){ //Set baud rate from 115200 to 19200
Serial.println("Set baud rate:19200");
}else{
Serial.println("Faile to set baud rate");
while(1);
}
mySerial.begin(19200);
Serial.println("For example, if you type AT\\r\\n, OK\\r\\n will be responsed!");
Serial.println("Enter your AT command :");
}
void loop() {
mySerial.listen();
while(mySerial.available()){
Serial.write(mySerial.read());
}
mySerial.flush();
while(Serial.available()){
mySerial.write(Serial.read());
}
delay(20);
}
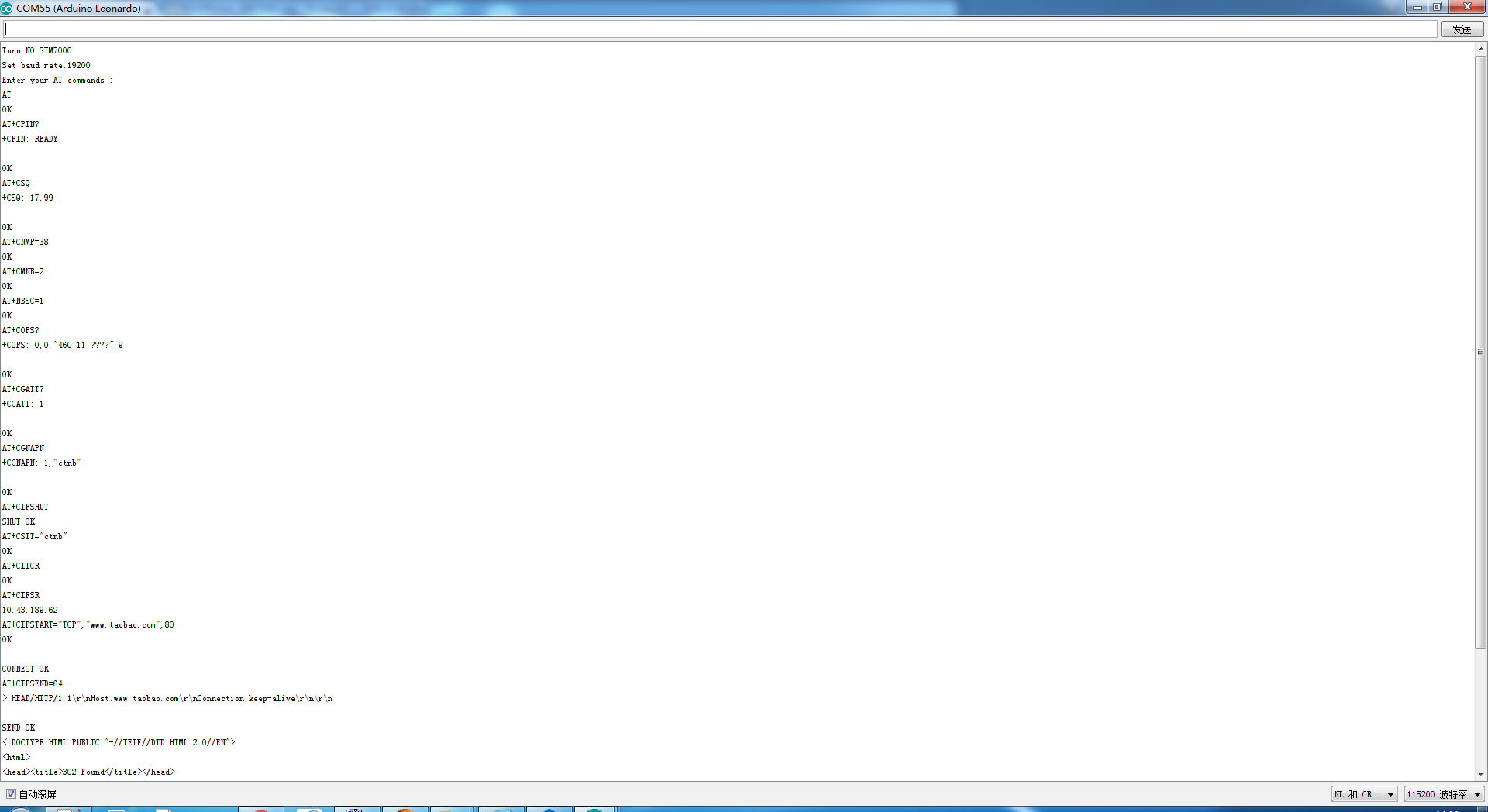
运行程序后在Uno串口上输入AT指令,即可完成AT指令直接控制SIM7000。下载AT指令表
- 常用AT指令简介:
- AT+CNMP=?
- 网络制式选择:AT+CNMP=2表示模块自动找网模式,AT+CNMP=13表示锁定 GSM only 使用,AT+CNMP=38 表示锁定“ CAT-M1+NBIoT ”组合使用,AT+CNMP=51 表示锁定“ GSM+CAT-M1+NBIoT ”组合使用
- AT+CMNB=?
- LTE网络制式选择:AT+CMNB=1 设置 CAT-M1 模式, AT+CMNB=2 设置 NBIoT 模式,AT+CMNB=3 设置 CAT-M1 和 NBIoT 组合模式
- AT+CSQ
- 检测信号质量,第一个值表示信号强度,为99时表示无法检测信号,此时无法模块通信。第二个值表示误码率,可能值 0-7:误码率依次增加,>6时难以通信,99:暂时无法检测,不影响通信。
- AT+CGATT?
- 检测网络附着状态,1:已附着,可正常通信。2:未附着,不能通信。
- AT+CSTT
- 开启连接任务。
- AT+CIFSR
- 获取本地IP。
- AT+CIPSTART="ptl","host","port"
- 建立连接,ptl:连接协议(TCP或UDP),host:连接域名,可输入具体域名或IP地址。port:连接端口。连接成功返回CONNECT OK
- AT+CIPSEND="len"
- 发送数据,len:发送数据长度,在返回的“>”后输入发送的数据。
- AT+CIPCLOSE
- 断开当前连接。
- AT+CIPSHUT
- 关闭连接,释放资源。
- AT+CNMP=?
- 程序演示:
使用教程(获取定位)
准备工作
与上面的教程(基于SIM7000库)保持一致
硬件连接
连接有源天线,并在户外使用
样例代码
#include <Wire.h>
#include <DFRobot_SIM7000.h>
DFRobot_SIM7000 sim7000(&mySerial);
SoftwareSerial mySerial(8, 7); //Set serial
void setup() {
int signalStrength, dataNum;
Serial.begin(115200);
mySerial.begin(19200);
if (sim7000.turnON()) { //Turn ON SIM7000
Serial.println("Turn NO SIM7000");
}
if (sim7000.setBaudRate(19200)) { //Set baud rate from 115200 to 19200
Serial.println("Set baud rate:19200");
} else {
Serial.println("faile to set baud rate");
}
while (1) {
if (sim7000.init()) { //Init SIM7000
Serial.println("AT command READY");
break;
} else {
Serial.println("AT command ERROR");
delay(500);
}
}
while (1) {
if (sim7000.initPos()) {
Serial.println("Positioning function initialized");
break;
} else {
Serial.println("Fail to init positioning function");
delay(500);
}
}
}
void loop() {
Serial.println("Enter anything to get positioning ");
char loge[10];
readSerial(loge);
Serial.println("Getting position......");
if (sim7000.getPosition()) { //Get the current position
Serial.print("Longtude :");
Serial.println(sim7000.getLongitude()); //Get longitude
Serial.print("Latitude :");
Serial.println(sim7000.getLatitude()); //Get latitude
} else {
Serial.println("Wrong data try again");
}
}
int readSerial(char result[]) {
int i = 0;
while (1) {
while (Serial.available() > 0) {
char inChar = Serial.read();
if (inChar == '\n') {
result[i] = '\0';
Serial.flush();
return 0;
}
if (inChar != '\r') {
result[i] = inChar;
i++;
}
}
}
}
- 函数说明:
- 初始化获取定位功能,成功后返回true
initPos();
- 获取当前定位,成功后返回true
getPosition();
- 获取当前经度,东经为正值,西经为负值(-180,180)
getLongitude();
- 获取当前纬度,北纬为正值,南纬为负值(-90,90)
getlatitude();
BME280环境数据监测
SIM7000板载BME280环境监测传感器,默认采用I2C连接方式,使用前请下载Arduino库文件,点击下载
注意:SIM7000系列扩展板在V2.0及后续版本,已去除板载BME280传感器
/*!
raed_data_i2c.ino
Download this demo to test read data from bme280, connect sensor through I2C interface
Data will print on your serial monitor
Copyright [DFRobot](https://www.dfrobot.com), 2016
Copyright GNU Lesser General Public License
version V1.0
date 12/03/2019
*/
#include "DFRobot_BME280.h"
#include "Wire.h"
typedef DFRobot_BME280_IIC BME; // ******** use abbreviations instead of full names ********
/**I2C address is 0x77 when pin SDO is high (BME280 sensor module)*/
/**I2C address is 0x76 when pin SDO is low (SIM7000)*/
BME bme(&Wire, 0x76); // select TwoWire peripheral and set sensor address
#define SEA_LEVEL_PRESSURE 1015.0f
// show last sensor operate status
void printLastOperateStatus(BME::eStatus_t eStatus)
{
switch (eStatus) {
case BME::eStatusOK: Serial.println("everything ok"); break;
case BME::eStatusErr: Serial.println("unknow error"); break;
case BME::eStatusErrDeviceNotDetected: Serial.println("device not detected"); break;
case BME::eStatusErrParameter: Serial.println("parameter error"); break;
default: Serial.println("unknow status"); break;
}
}
void setup()
{
Serial.begin(115200);
bme.reset();
Serial.println("bme read data test");
while (bme.begin() != BME::eStatusOK) {
Serial.println("bme begin faild");
printLastOperateStatus(bme.lastOperateStatus);
delay(2000);
}
Serial.println("bme begin success");
delay(100);
}
void loop()
{
float temp = bme.getTemperature();
uint32_t press = bme.getPressure();
float alti = bme.calAltitude(SEA_LEVEL_PRESSURE, press);
float humi = bme.getHumidity();
Serial.println();
Serial.println("======== start print ========");
Serial.print("temperature (unit Celsius): "); Serial.println(temp);
Serial.print("pressure (unit pa): "); Serial.println(press);
Serial.print("altitude (unit meter): "); Serial.println(alti);
Serial.print("humidity (unit percent): "); Serial.println(humi);
Serial.println("======== end print ========");
delay(1000);
}
兼容性测试
| MCU | 测试通过 | 测试失败 | 未测试 | 特别标注 |
|---|---|---|---|---|
| Arduino Uno | √ | |||
| Arduino Leonardo | √ | |||
| Arduino Mega1280 | √ | 短接D8和D10,改代码PIN_RX=10 | ||
| Arduino Mega2560 | √ | 短接D8和D10,改代码PIN_RX=10 |
常见问题
问:烧录示例代码后,串口输出没法初始化?
答:(1)检查是否外部供电7~12V,通过主板DC2.1黑色圆孔供电,或者通过扩展板vin,gnd端口供电。(2)检查是否安装两个天线。(3)检查扩展板上的拨码开关TX>D8,RX>D7(4)查看扩展板上的红色电源指示灯是否常亮,net指示灯是否闪烁(5)检查是否插上nb卡。检查后,按下boot按键重启观察
AT指令使用视频,mega2560接sim7000:https://mc.dfrobot.com.cn/thread-313989-1-1.html#pid523241
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
