STEP1: 组装步骤
工具准备就绪后,我们就要开始开工了!海盗船的底盘组装非常容易,只需要按照以下步骤一步步安装就行了。
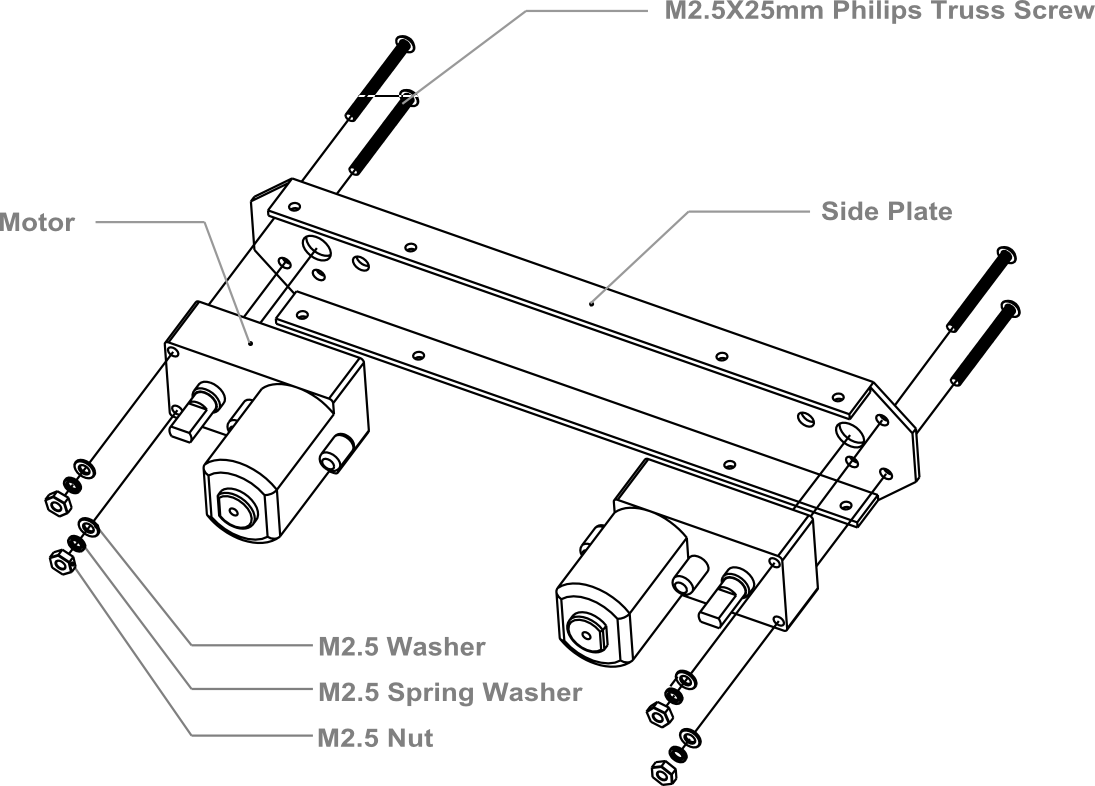
安装电机
拿出零件包,有找到8个长螺丝吗?那就是用来固定电机的。按下图位置摆放电机,找到对应的8个固定孔,拧上螺丝就行了。 这里可能需要注意的一点是,零件包里面还有配有垫圈和锁紧垫片。垫圈可以用于增加摩擦力,是电机固定更牢固。锁紧片用来防止螺母由于震动可能导致的松脱。
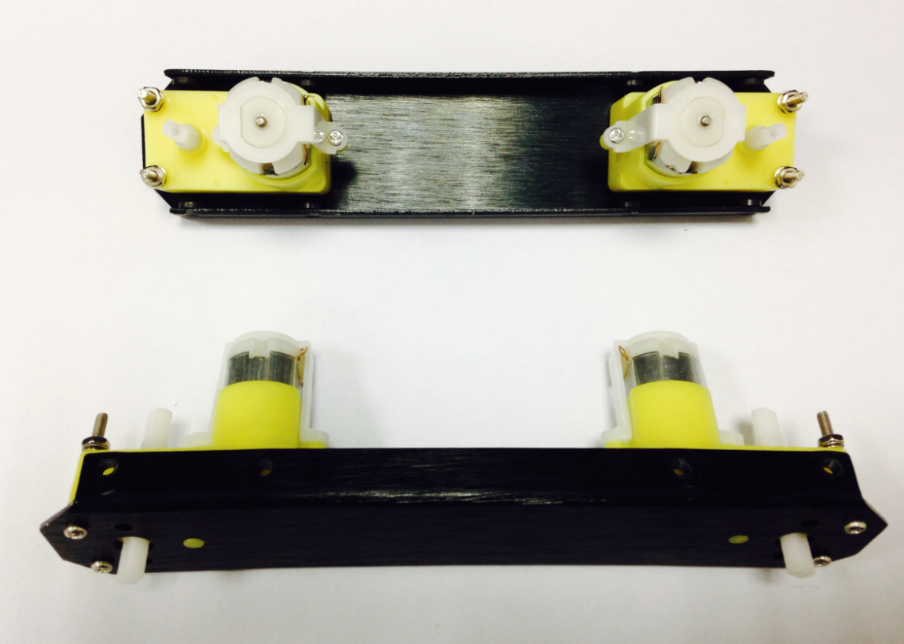
焊接电机线
取出套件里自带的红黑导线,每个电机红、黑各一根,长度大约在15cm左右。用剥线钳在线两头剥去外皮,留下导线用于焊接在电机引脚上。将四个电机线全部焊好。
| 注意:焊接的时候,注意线序正确,可参照下图的红黑线的位置。 |
|---|
image:Assemble Mobile Platform STEP2_1.png image:Assemble Mobile Platform STEP2_2.jpg image:Assemble Mobile Platform STEP2_3.png
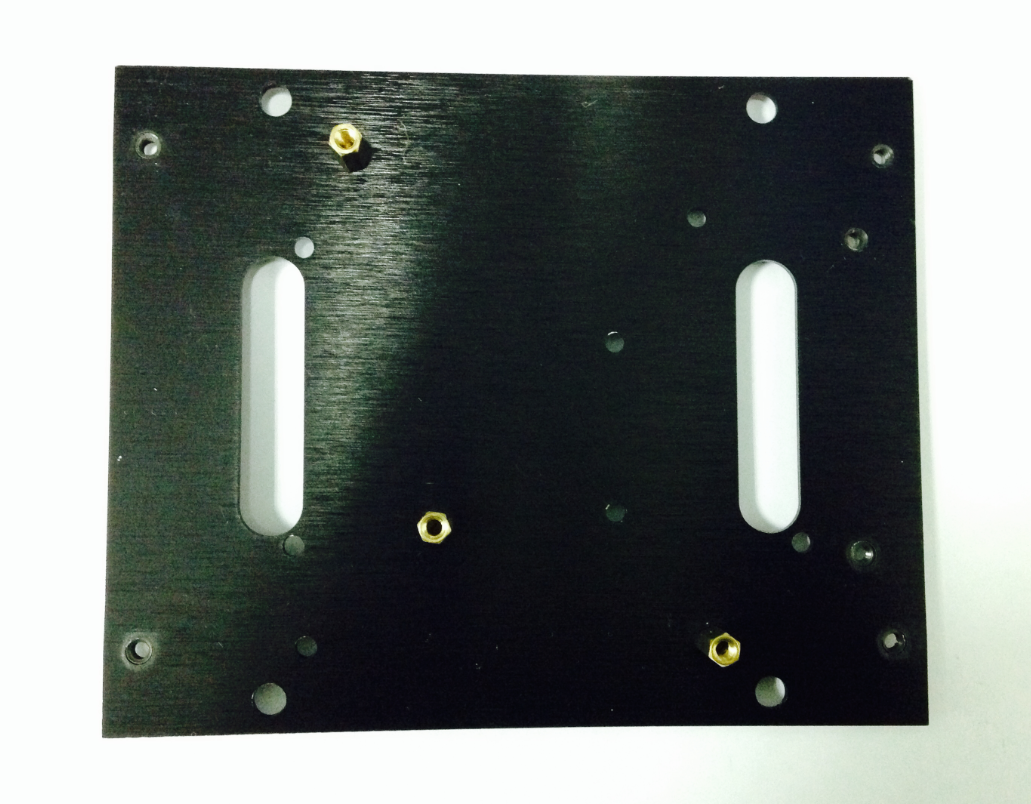
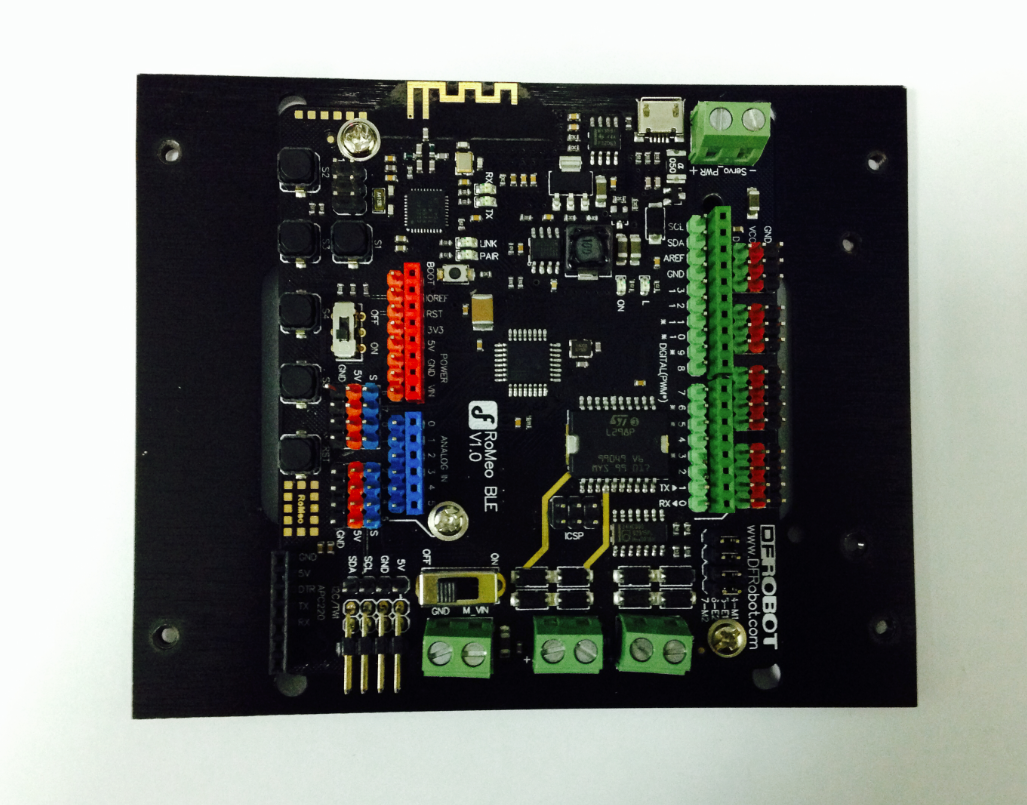
安装Romeo BLE 控制器
找到零件包中的3个1cm长的铜柱,那是用于固定控制板的。首先,需要找到控制器的三个固定空位。并将铜柱拧上去。完成之后,再将控制器用螺丝固定上去。
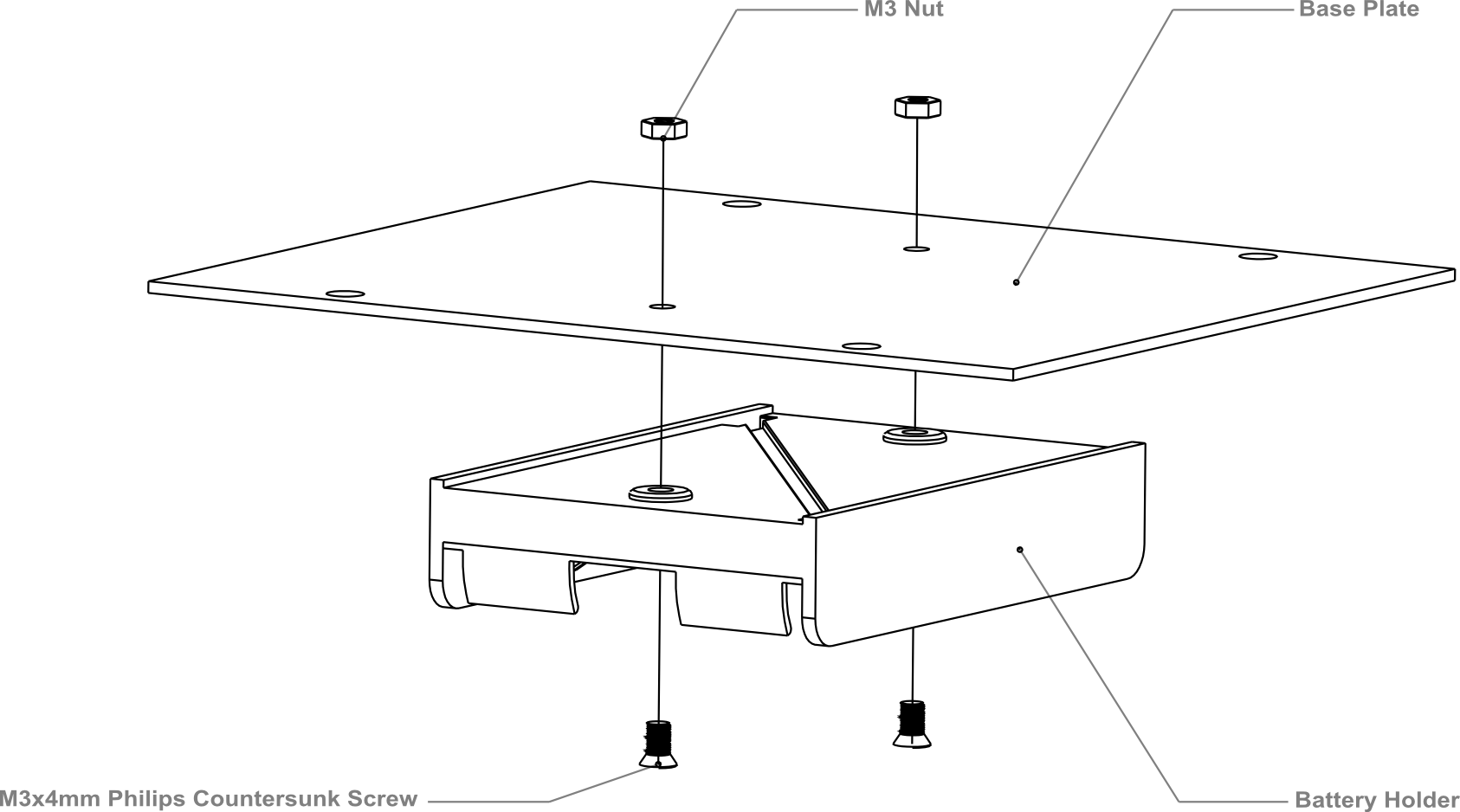
安装电池盒
取出独立包装的两个沉头(顶部是平的)螺丝,按下图装配图,将电池盒固定到底盘上。
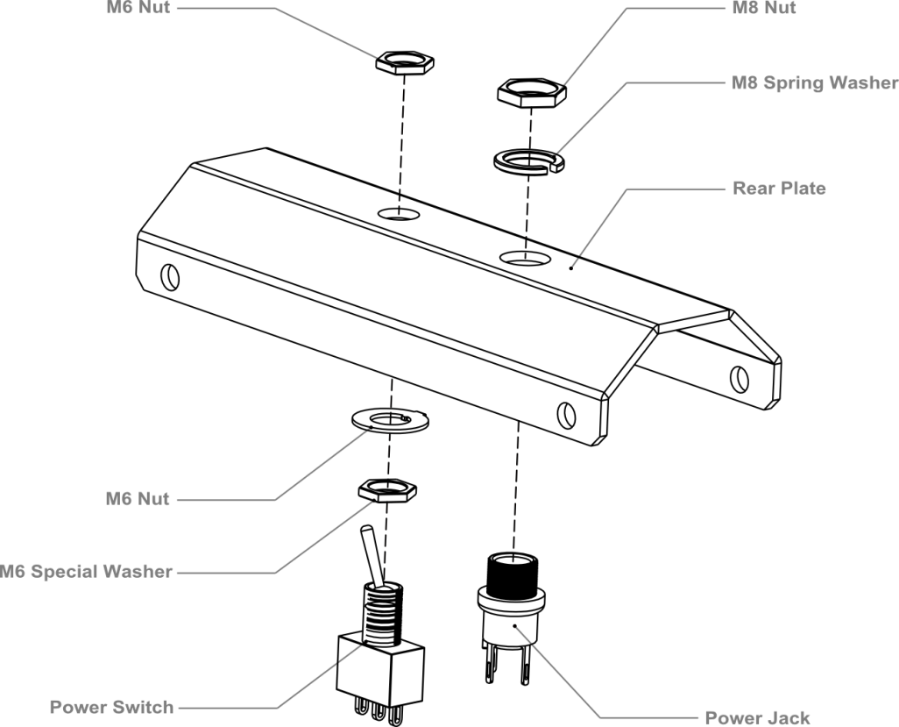
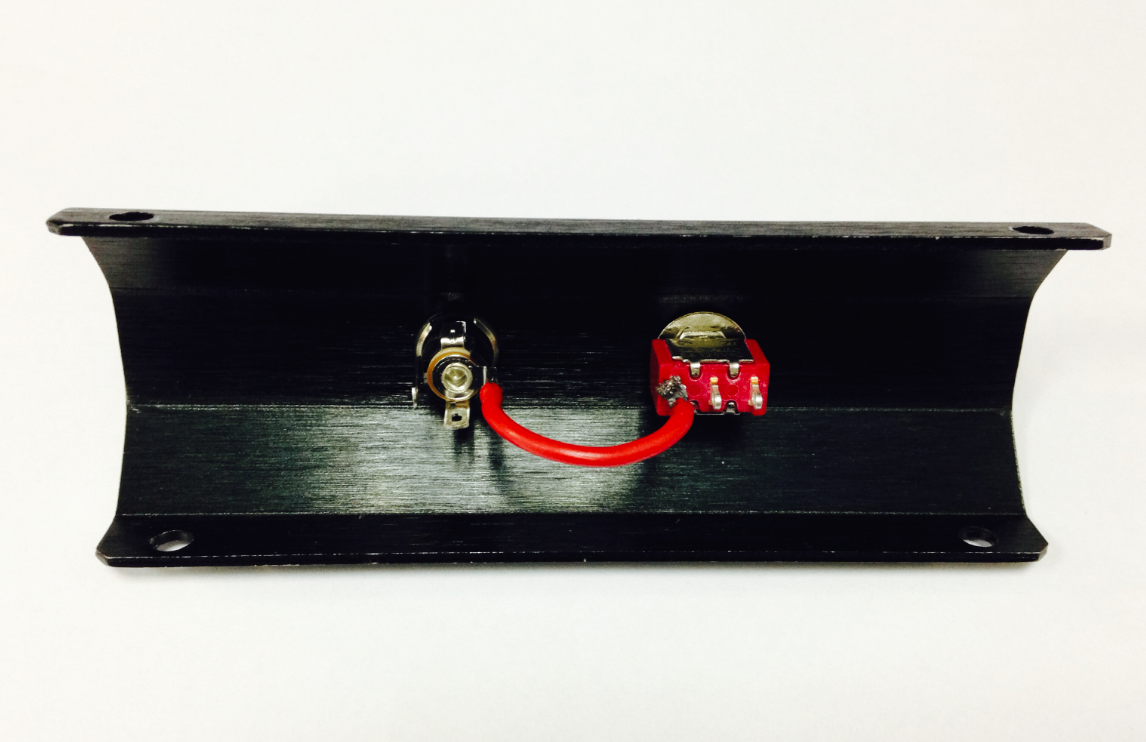
制作电源开关
我们都知道需要用电池来给机器人供电。平时不用的时候,需要断电来节约电量,那电源开关在这里就起到作用了。先按装配图将机器人的开关位置安装好。安装的时候注意垫片和螺母的顺序。
固定完成之后,就要开始焊线了,取出前面焊接电机连接线剩余的部分,可用于开关。同样,用剥线钳剥去线两头的外皮,留出导线部分用于焊接到开关的引脚上。焊接的时候注意看清楚开关的引脚位置。
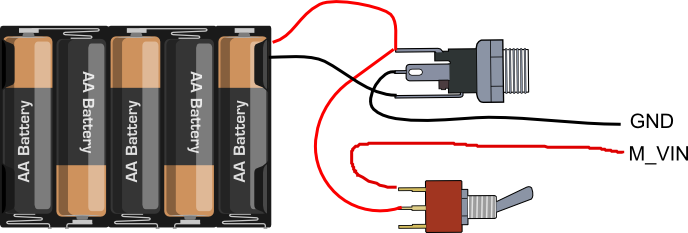
我们一步步来: a) 连接开关和充电接头。注意找准位置。
b) 按上图连线图,将电池盒的两根线焊接到充电接头上。
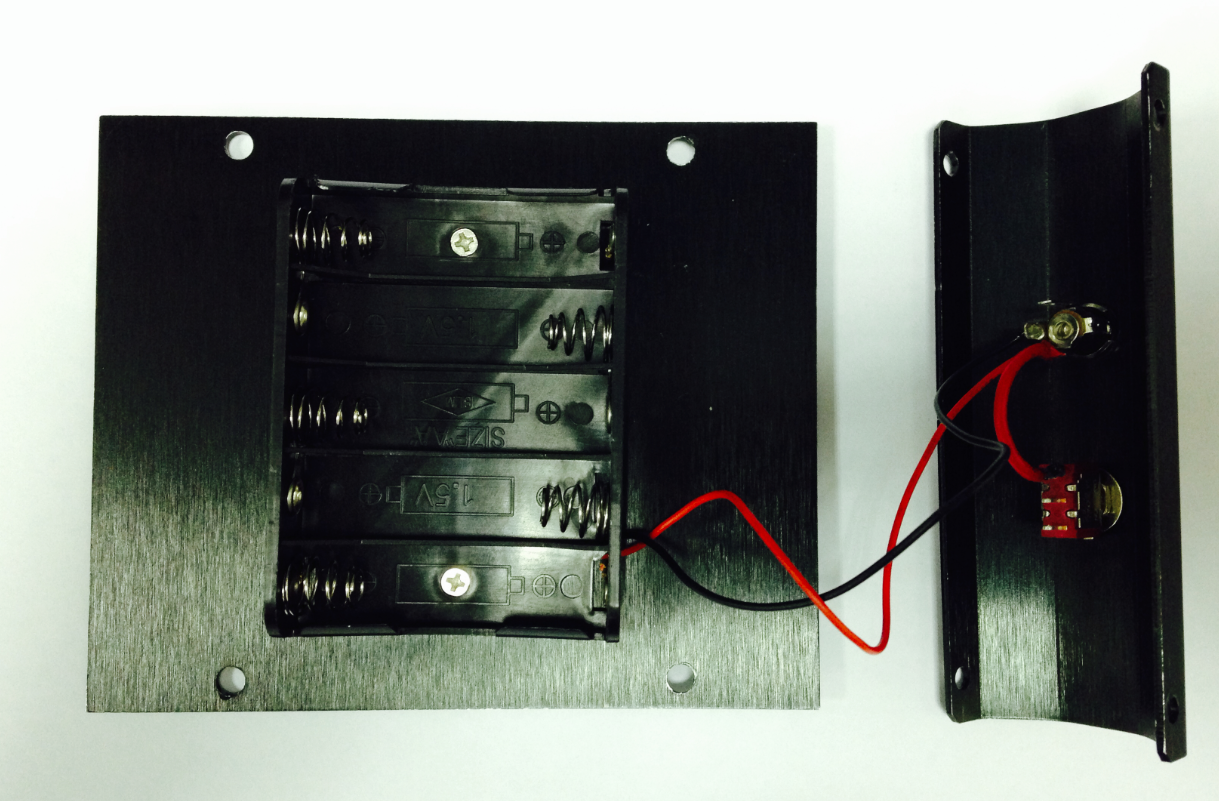
来张大图,看的清楚点!
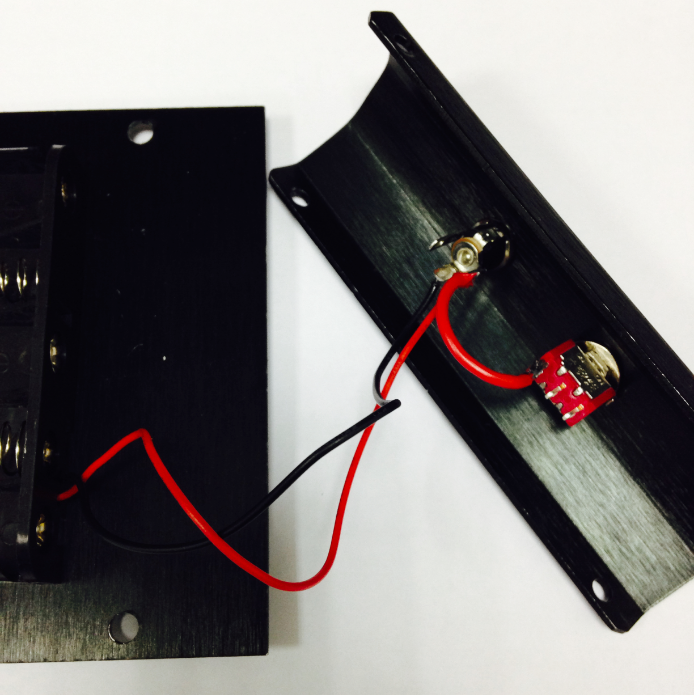
c) 最后,从充电接头和开关上引出正负极电源,用于接到后面的Romeo BLE主控器上。
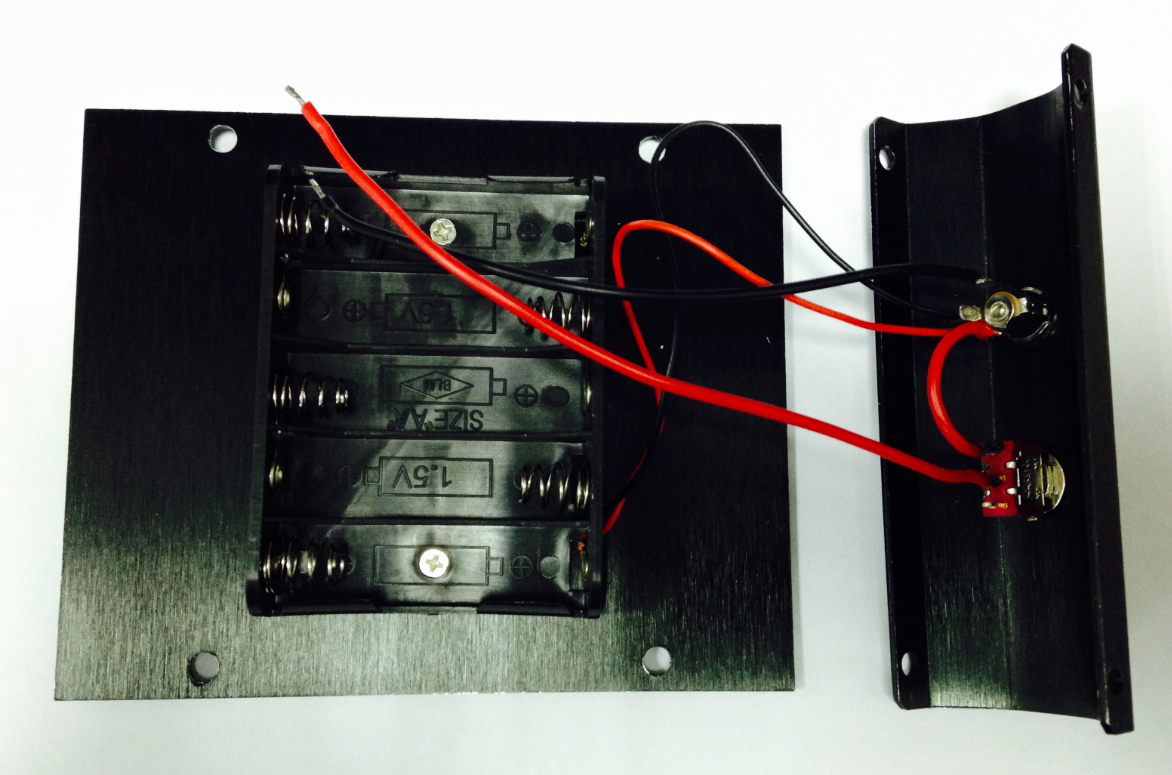
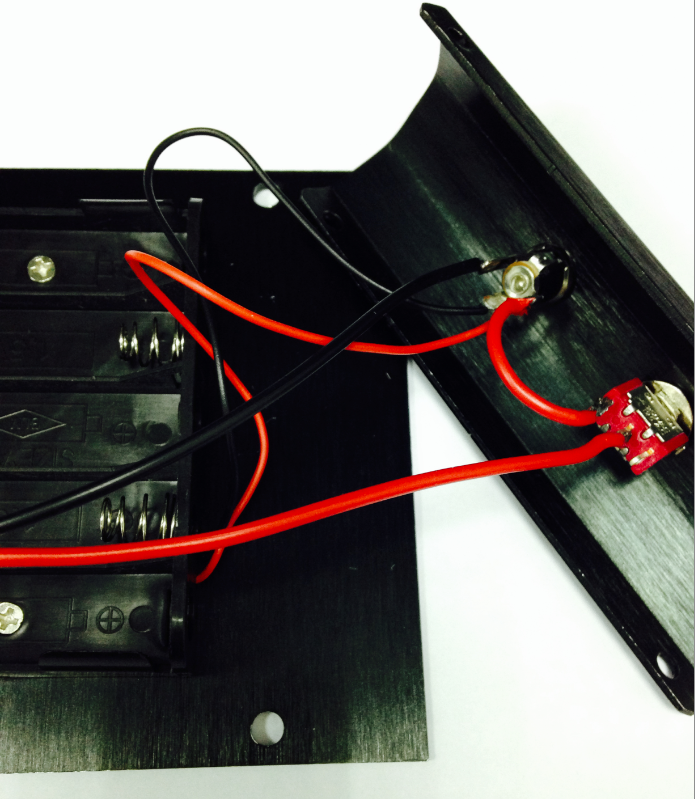
同样来张放大图,清楚是怎么连接的吗?最后,检查一下焊接的线是否和一开始的连线图是吻合的。
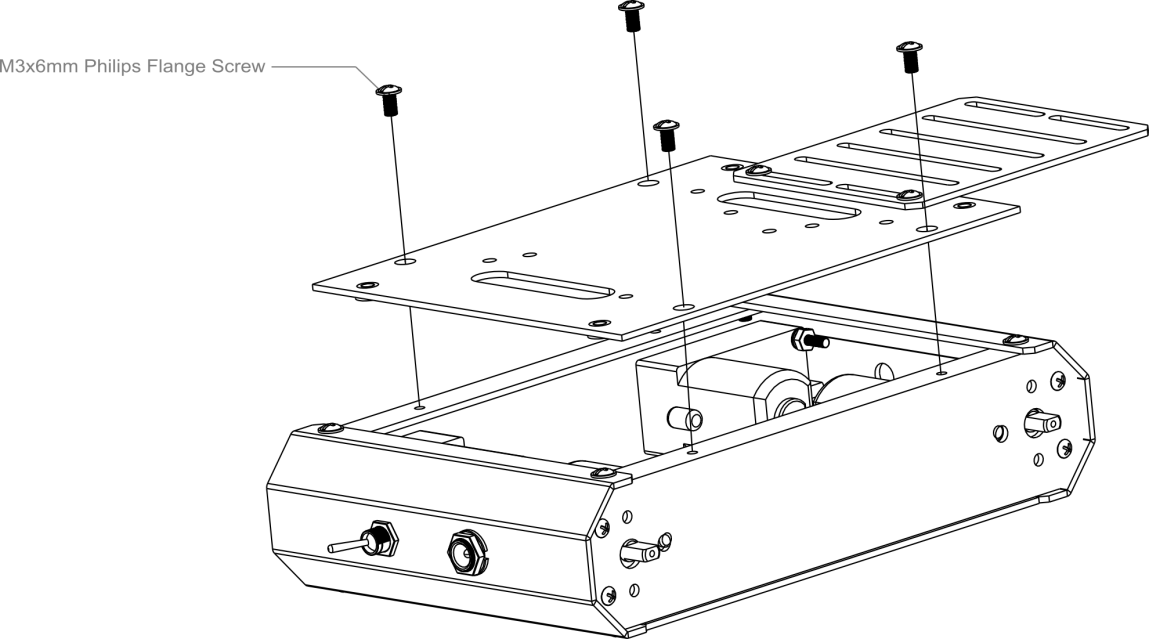
组装底盘
用8个M3×6mm的螺丝将前后板固定到侧板上。按下图装配图安装。
| 注意:拧螺丝的时候,不要一开始就将螺丝全拧紧,导致下一步安装上层板的时候。螺丝孔对应不上。 |
|---|
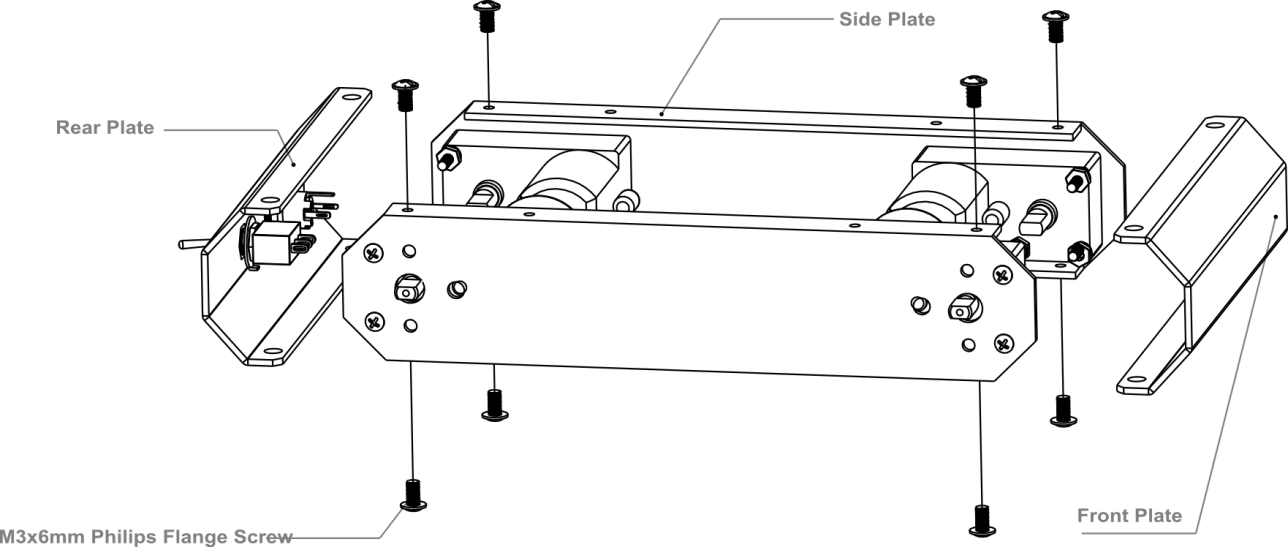
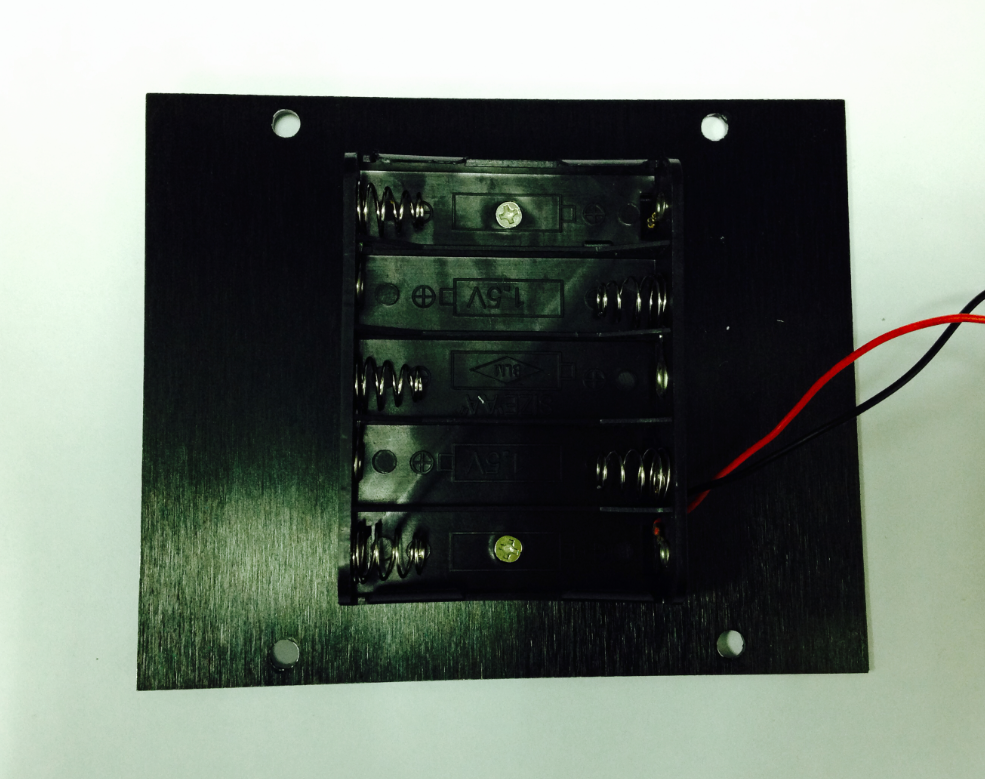
安装完后,将底板固定上去,见装配图。
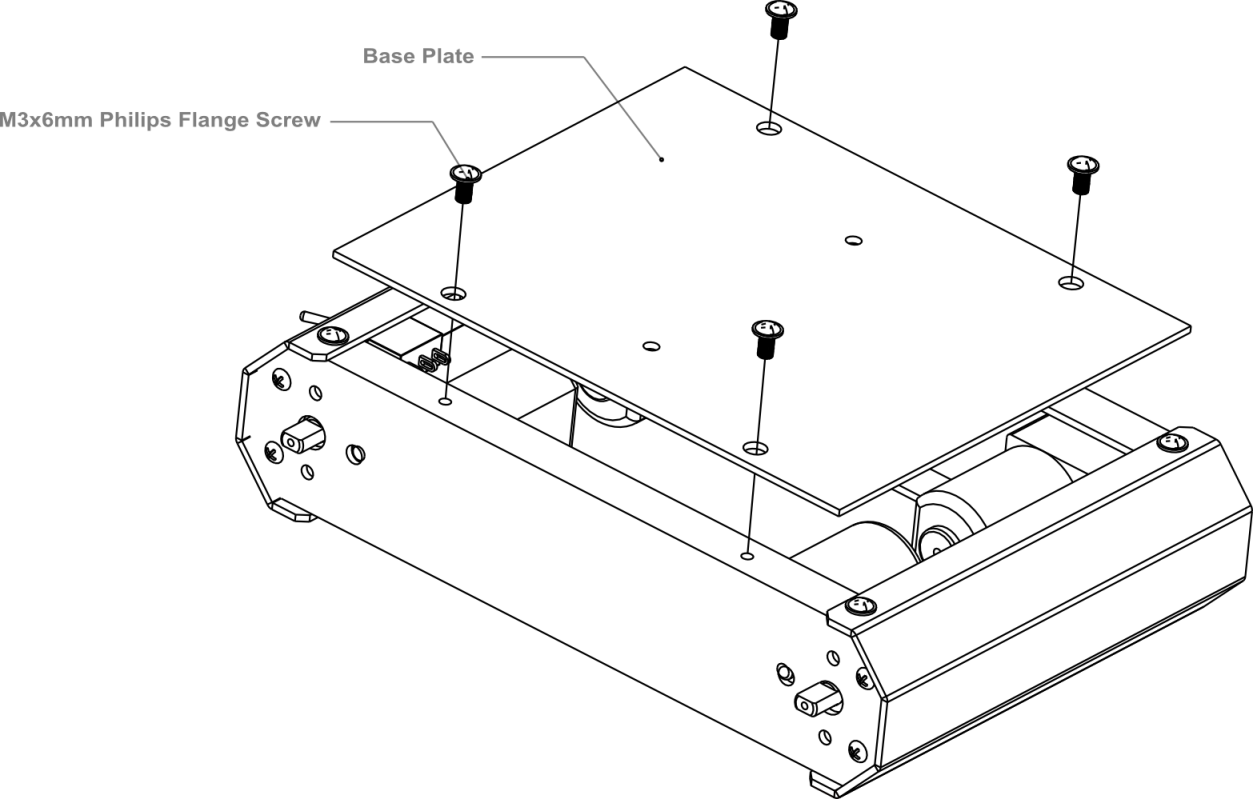
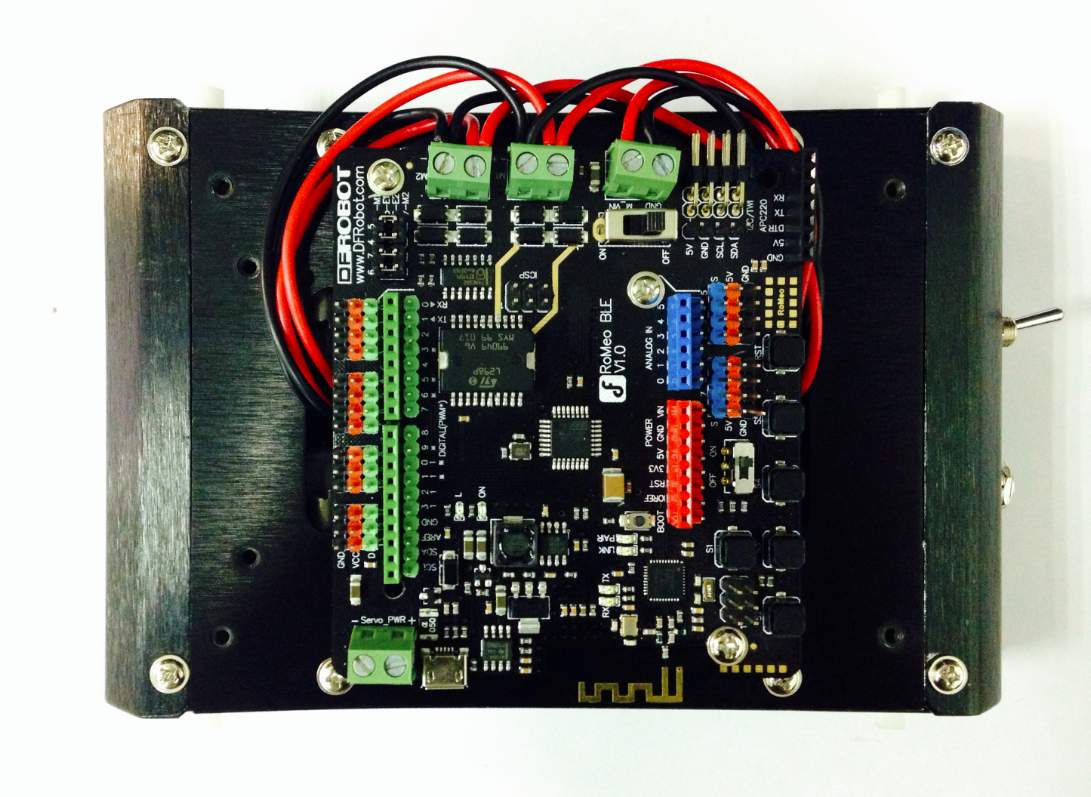
完成后的样子,记得装上电池!
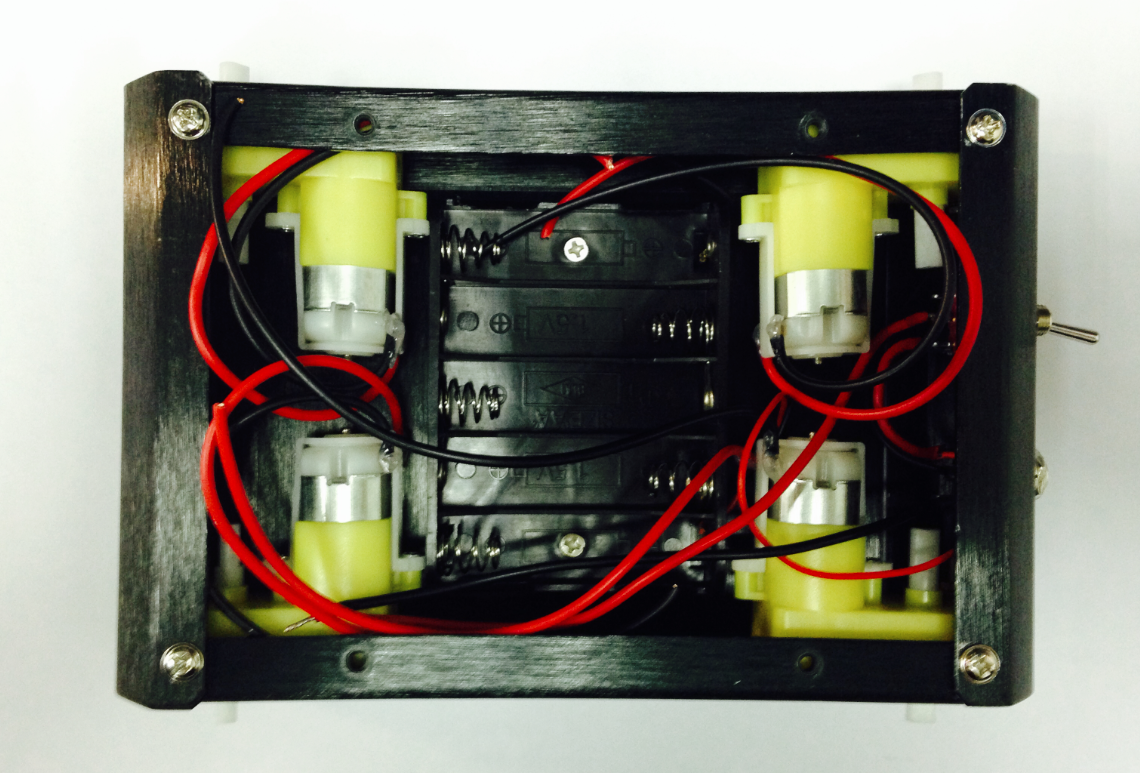
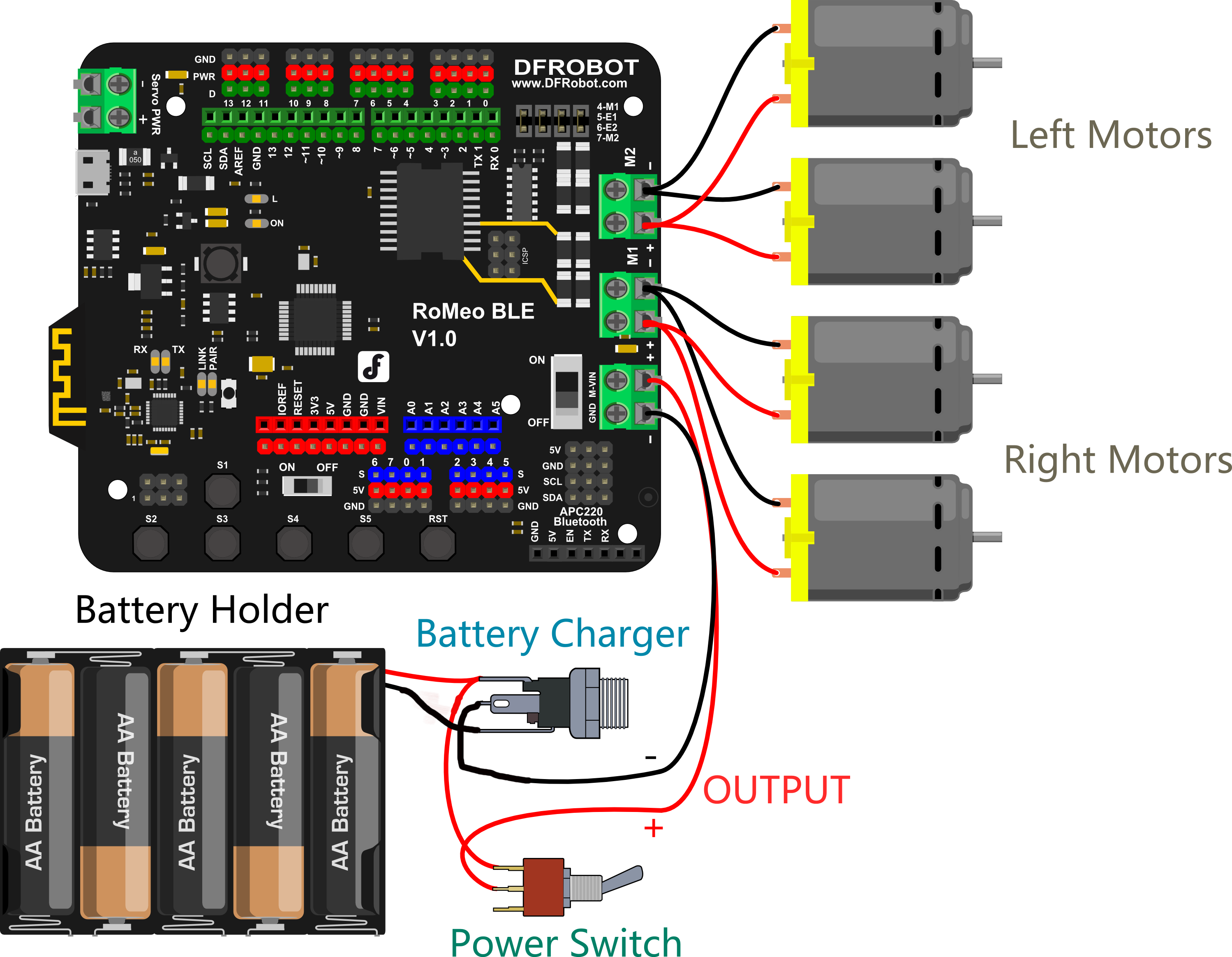
连接电机
这一步我们需要将电机和我们的控制器连接起来,按下图连线图将电机线一一接到电机驱动的接线柱上,并用螺丝刀拧紧固定。
| 注意:同一侧的两个电机需要固定在同一个电机驱动接口上。 |
|---|
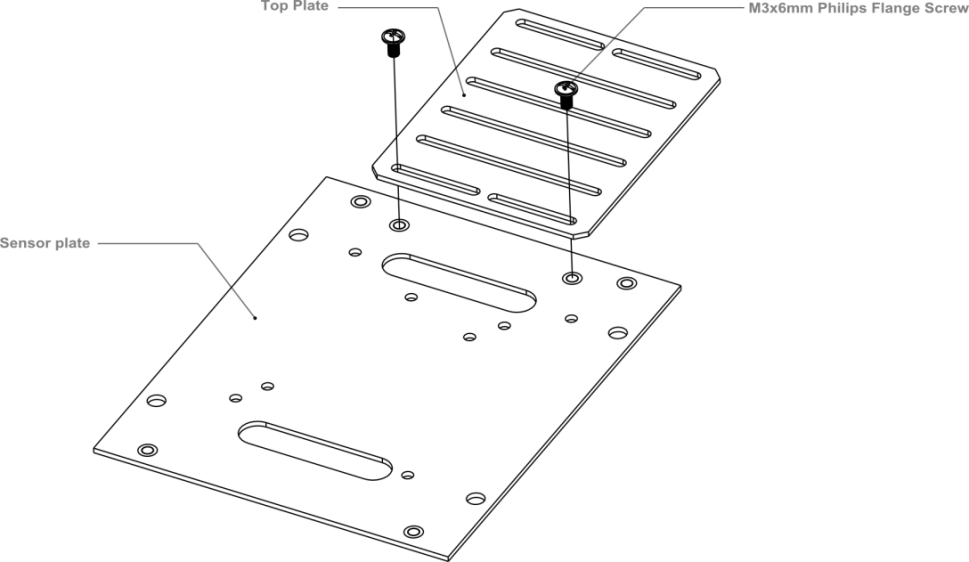
连接完成后,我们需要盖上顶板。盖顶板前,可以先装上传感器板。如果用不到的话,可以先不装。
安装完成后,如下图所示。
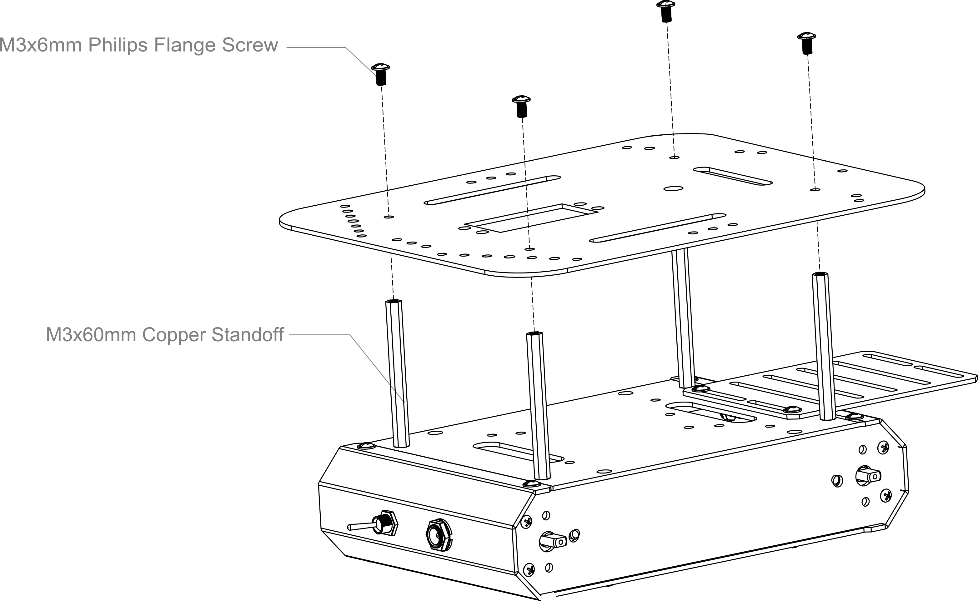
安装上层板
找到上层板的四个安装孔位,拧上螺丝。
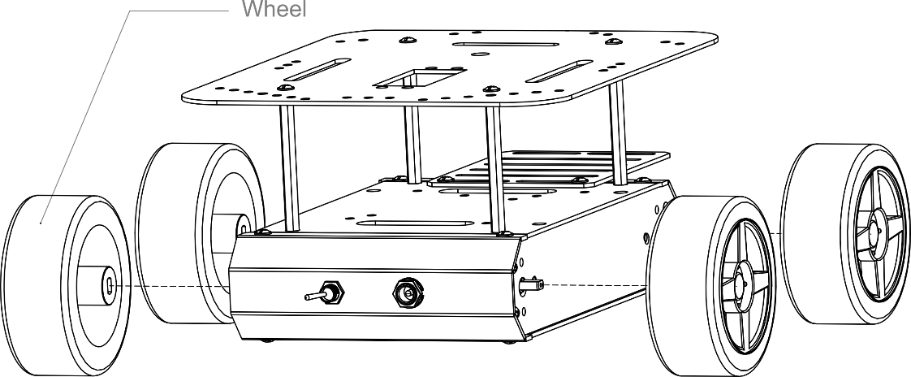
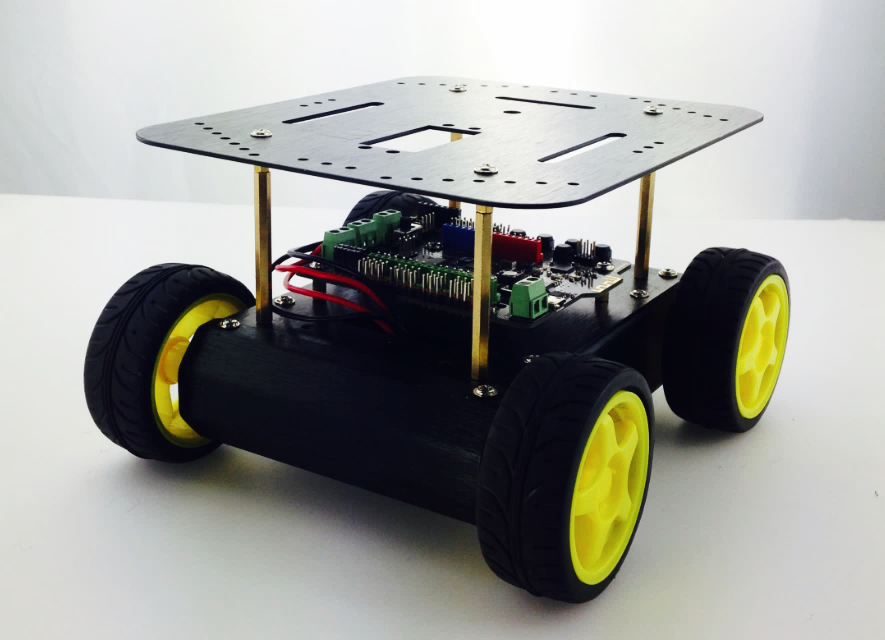
装上轮子,大功告成!
STEP2: 调试电机
' 下载电机调试代码'
int speedPin_M1 = 5; //M1 Speed Control
int speedPin_M2 = 6; //M2 Speed Control
int directionPin_M1 = 4; //M1 Direction Control
int directionPin_M2 = 7; //M1 Direction Control
void setup(){
}
void loop(){
carAdvance(100,100);
delay(1000);
carBack(100,100);
delay(1000);
carTurnLeft(250,250);
delay(1000);
carTurnRight(250,250);
delay(1000);
}
void carStop(){ // Motor Stop
digitalWrite(speedPin_M2,0);
digitalWrite(directionPin_M1,LOW);
digitalWrite(speedPin_M1,0);
digitalWrite(directionPin_M2,LOW);
}
void carTurnLeft(int leftSpeed,int rightSpeed){ //Turn Left
analogWrite (speedPin_M2,leftSpeed); //PWM Speed Control
digitalWrite(directionPin_M1,HIGH);
analogWrite (speedPin_M1,rightSpeed);
digitalWrite(directionPin_M2,HIGH);
}
void carTurnRight(int leftSpeed,int rightSpeed){ //Turn Right
analogWrite (speedPin_M2,leftSpeed);
digitalWrite(directionPin_M1,LOW);
analogWrite (speedPin_M1,rightSpeed);
digitalWrite(directionPin_M2,LOW);
}
void carBack(int leftSpeed,int rightSpeed){ //Move backward
analogWrite (speedPin_M2,leftSpeed);
digitalWrite(directionPin_M1,LOW);
analogWrite (speedPin_M1,rightSpeed);
digitalWrite(directionPin_M2,HIGH);
}
void carAdvance(int leftSpeed,int rightSpeed){ //Move forward
analogWrite (speedPin_M2,leftSpeed);
digitalWrite(directionPin_M1,HIGH);
analogWrite (speedPin_M1,rightSpeed);
digitalWrite(directionPin_M2,LOW);
}
上电后发现,如果发现效果与代码不匹配,可以对代码做一下微调整。直到匹配为止,才进行下一步。