简介
DFRobot新推BMP388气压传感器Breakout版本,具有温度检测和大气压检测双重功能。支持Arduino代码控制,相对于旧版的BMP180,BMP280,BMP388拥有更低的功耗,更小的尺寸,更高的分辨率以及更高的采样频率。
气压传感器通常用于大气压检测和温度检测,并且由于气压和海拔高度之间的关系,人们通常可以利用气压来检测海拔高度和相对的楼层高度。在导航方面,气压计也可以用来增强GPS定位效果或者配合IMU传感器,实现三维(3D)室内导航。
BMP388基于博世成熟的压电式压力传感器技术,具有高EMC稳健性,高精度,低功耗等特点。精度约为±8Pa,近似高度误差为±0.66 m,支持0~65℃温度检测。
注意:由于传感器对环境条件非常敏感,请勿用手指触摸。
应用领域
- 温度检测
- 大气压强检测
- 海拔高度检测
- 室内导航(楼层检测、电梯检测)
- 户外导航、休闲和运动的应用程序
- 医疗保健应用程序(如肺活量测定法)
- 垂直速度指示(如上升/下沉速度)
技术规格
- 工作电压:3.3V-5.5V
- 工作电流:0.5mA
- 测量范围:300-1250 hPa
- 相对气压测量精度:±0.08 hPa(等价±0.66m @700-900hPa,25℃-40℃)
- 绝对气压测量精度:±0.5 hPa(0℃-65℃@300-1100hPa)
- 温度漂移系数:±0.75 Pa/K(-20℃-65℃@700-1100hPa)
- 绝对温度测量精度:±0.5℃(@0℃-65℃)
- 工作温度:-40℃~80℃(在0℃-65℃测量更精确)
- 接口:I2C 4Pin或者SPI(SPI仅在3.3V电压下使用)
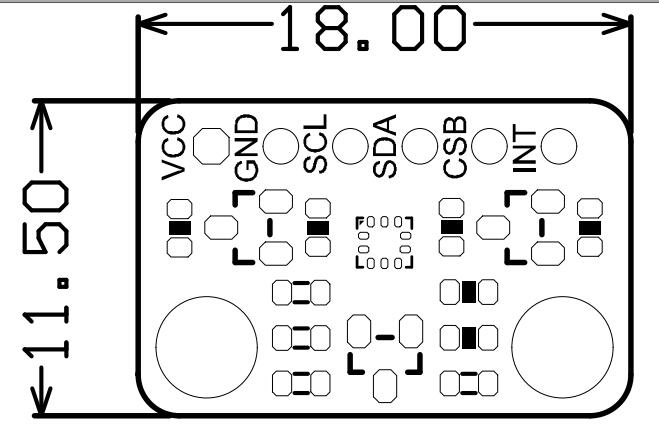
- 外形尺寸:18mm x 11.5mm
- 安装孔位置:13mm
- 安装孔尺寸:内径2mm/外径3.7mm
注意:该传感器默认I2C地址为0X76。
引脚说明


| 丝印 | 功能描述 |
|---|---|
| SDA | I2C数据 |
| SCL | I2C时钟 |
| INT | 中断输出引脚 |
| SCK | SPI-CLK |
| SDI | SPI-MOSI |
| CSB | SPI-CS |
| SDO | SPI-MISO/I2C地址选择 |
| GND | 电源负极 |
| VCC | 电源正极 |
使用教程
- 目标:测出当前环境下的大气压强和温度值,计算出模块当前所在环境的海拔高度
准备
- 硬件
- 1 x Arduino UNO控制板
- 1 x BMP388 Digital pressure sensor module温度&气压计
- 若干 杜邦线
- 软件
- Arduino IDE 点击下载Arduino IDE
接线图
连接模块与UNO主板(通过I2C接口),按照如下图的方式连接。

样例代码
#include <DFRobot_BMP3XX.h>
/* If using Gravity products, choose these two interfaces and comment subsequent interfaces. */
// DFRobot_BMP388_I2C sensor;
// DFRobot_BMP390L_I2C sensor;
/**
* Select the chip version BMP388/BMP390L
* Select communication interface I2C, please comment out SPI interface.
* I2C communication address settings: eSDOGND: connect SDO pin to GND, I2C address is 0×76 now.
* eSDOVDD: Connect SDO pin to VDDIO (3v3), I2C address is 0×77 now
*/
// DFRobot_BMP388_I2C sensor(&Wire, sensor.eSDOVDD);
DFRobot_BMP390L_I2C sensor(&Wire, sensor.eSDOVDD);
/**
* Select chip version BMP388/BMP390L
* Select communication port SPI, please comment out I2C port
* Set up digital pin according to the on-board pin connected with SPI chip-select pin.
* Notice: csPin used here is D3 digital pin on ESP32, other non-conflicting pins can also be selected as external interrupt pins.
*/
// uint8_t csPin = D3;
// DFRobot_BMP388_SPI sensor(&SPI, csPin);
// DFRobot_BMP390L_SPI sensor(&SPI, csPin);
/* If you do not need to eliminate the absolute difference of measurement, please comment the following line */
#define CALIBRATE_ABSOLUTE_DIFFERENCE
void setup(void)
{
Serial.begin(115200);
int rslt;
while( ERR_OK != (rslt = sensor.begin()) ){
if(ERR_DATA_BUS == rslt){
Serial.println("Data bus error!!!");
}else if(ERR_IC_VERSION == rslt){
Serial.println("Chip versions do not match!!!");
}
delay(3000);
}
Serial.println("Begin ok!");
while( !sensor.setSamplingMode(sensor.eUltraPrecision) ){
Serial.println("Set samping mode fail, retrying....");
delay(3000);
}
delay(100);
#ifdef CALIBRATE_ABSOLUTE_DIFFERENCE
if( sensor.calibratedAbsoluteDifference(540.0) ){
Serial.println("Absolute difference base value set successfully!");
}
#endif
float sampingPeriodus = sensor.getSamplingPeriodUS();
Serial.print("samping period : ");
Serial.print(sampingPeriodus);
Serial.println(" us");
float sampingFrequencyHz = 1000000 / sampingPeriodus;
Serial.print("samping frequency : ");
Serial.print(sampingFrequencyHz);
Serial.println(" Hz");
Serial.println();
delay(1000);
}
void loop()
{
float temperature = sensor.readTempC();
Serial.print("temperature : ");
Serial.print(temperature);
Serial.println(" C");
float Pressure = sensor.readPressPa();
Serial.print("Pressure : ");
Serial.print(Pressure);
Serial.println(" Pa");
float altitude = sensor.readAltitudeM();
Serial.print("Altitude : ");
Serial.print(altitude);
Serial.println(" m");
Serial.println();
delay(1000);
}
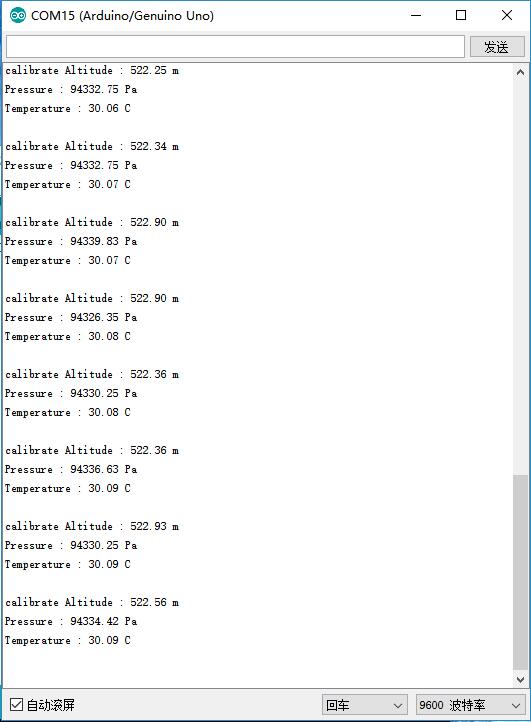
结果
- 在串口查看读取到的值
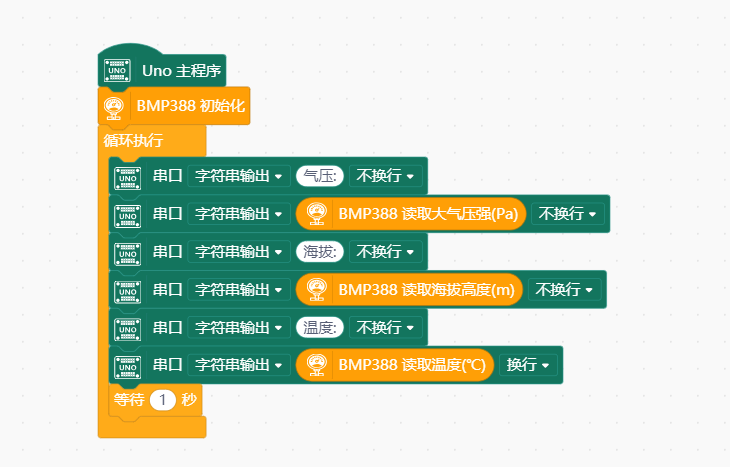
Mind+(基于Scratch3.0)图形化编程
- 下载及安装软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
- 切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程
- “扩展”中选择“主控板”中的“Arduino Uno”。 “扩展”“传感器”中搜索选择“BMP388模块”,详细教程:Mind+基础wiki教程-加载扩展库流程
- 进行编程,程序如下图:
- 菜单“连接设备”,“上传到设备”
- 程序上传完毕后,打开串口即可看到数据输出。详细教程:Mind+基础wiki教程-串口打印
注:Mind+中的BMP388默认地址是0x77,此传感器默认地址是0x76,需要先将此传感器的SDO引脚接到3V3上地址才是0x77.
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
更多
 [DFRobot商城购买链接]
[DFRobot商城购买链接]