简介
为了满足Arduino爱好者对LED灯带使用的需求,DFRobot特别推出了一款专用的LED灯带驱动板。这款驱动板不仅能有效克服Arduino的IO口输出电压与LED灯带工作电压不匹配的问题,同时也提供了极易操作的接线和编程体验,是制作灯光互动设备的首选工具。
作为一款与Arduino兼容LED灯带驱动,这款扩展板具有如下的特点:
- 该扩展板采用3个高品质的MOS管,每路能分别驱动12V/2A的LED灯带。当外部供电12V时,扩展板也能够为Arduino设备提供5V的稳定供电,保证设备正常运行。
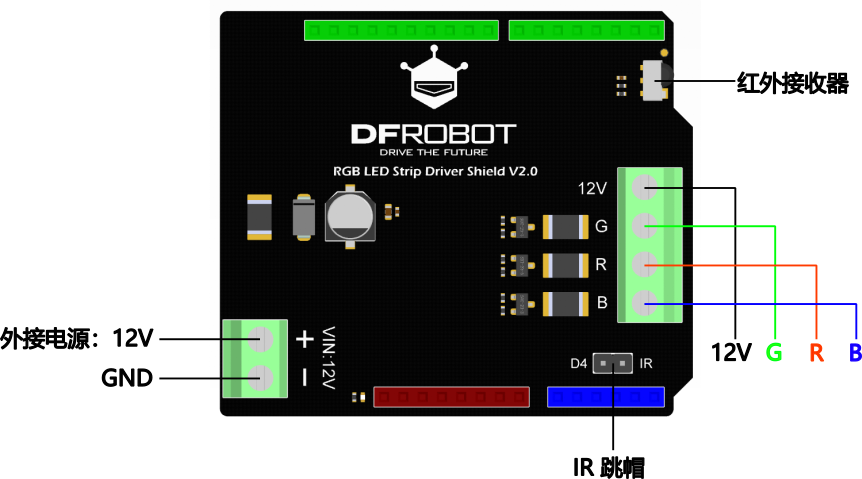
- 扩展板上附带红外接收传感器,你可以方便地通过红外信号遥控自己的作品,体验更丰富的交互乐趣。
- 另外,扩展板还采用长脚排针,兼容大部分标准Arduino接口,有效减少接触不良和针脚腐蚀的可能性,增加了设备的耐用性。
- 扩展板仅占用三个PWM接口(9,10和11)以及一个数字接口(4),分别用于控制RGB灯带的颜色和接收红外遥控信号。接口使用优化,确保了扩展板的工作效率。
- 为了保护LED灯带和Arduino设备,扩展板上特别设计了保险丝,能够限制设备的最大电流,有效防止设备过载损坏。
- 设备接入方便,外部12V的电源可以通过接线柱的接口接入,便于设备的部署和使用。
注意:用户需要自己购买Arduino主控器和灯带,组装灯光设备,该扩展板无法独立运作。
更新提示:RGB LED灯带驱动拓展板已经进行了升级,新版本具备更加稳定的电路设计,并将原有的快接接口优化为接线柱,以便于设备更为便捷的部署和使用。
技术规格
- 工作电压:12V
- 主控兼容:Arduino UNO,MGEA, Romeo等
- 最大功率:72W (每路2A)
- 红外遥控:×1
- 产品尺寸:62.2mm×53.3mm
引脚输出
Arduino驱动引脚:
- D9 -> PWM1(蓝色输出控制)
- D10 -> PWM2(红色输出控制)
- D11 -> PWM3(绿色输出控制)
红外接收引脚:
- D4 -> 红外数据接收
PS:可以通过移除排针上的跳线帽来禁用此功能。
注意:
- 通常我们使用共阳极RGB LED灯带。因此,当将RGB灯带连接到驱动器屏蔽时,需要为大功率LED灯带提供独立的12V电源。
- 该扩展板的最大供电电流总共约为6A(每路2A)。它可以直接驱动5米的RGB LED灯条。
示例代码
LED灯带驱动代码
以下是控制 RGB LED 灯带颜色的基本代码。
int RedPin = 10; //Arduino driving pin for Red
int GreenPin = 11; //Arduino driving pin for Green
int BluePin = 9; //Arduino driving pin for Blue
void setColor(int red, int green, int blue)
{
analogWrite(RedPin, red);
analogWrite(GreenPin, green);
analogWrite(BluePin, blue);
}
void setup()
{
pinMode(RedPin, OUTPUT); //Init Arduino driving pins
pinMode(GreenPin, OUTPUT);
pinMode(BluePin, OUTPUT);
Serial.begin(9600);
}
void loop()
{
for (int i=0;i<255;i++) //Changing Red brightness
{
setColor(i, 0, 0);
delay (10);
}
delay(2000);
for (int i=0;i<255;i++) //Changing Green brightness
{
setColor(0, i, 0);
delay (10);
}
delay(2000);
for (int i=0;i<255;i++) //Changing Blue brightness
{
setColor(0, 0, i);
delay (10);
}
delay(2000);
for (int i=0;i<255;i++)
{
setColor(i, 0, 255-i);
delay (10);
}
for (int i=0;i<255;i++)
{
setColor(255-i, i, 0);
delay (10);
}
for (int i=0;i<255;i++)
{
setColor(0, 255-i, i);
delay (10);
}
}
红外接收码
对于红外接收功能,我们建议使用Ken Shirriff 创建的Arduino IRRemote 库。该库非常易于使用,并且直接支持解码几种不同的IR协议。
//Please download the arduino library and install it before compiling the sample code
/*
* IRremote: IRrecvDemo - demonstrates receiving IR codes with IRrecv
* An IR detector/demodulator must be connected to the input RECV_PIN.
* Version 0.1 July, 2009
* Copyright 2009 Ken Shirriff
* http://arcfn.com
*/
#include <IRremote.h>
int RECV_PIN = 4; //IR Receiving pin on the driver shield
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
}
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
irrecv.resume(); // Receive the next value
}
}
红外遥控演示
使用 dfrobot 的红外发射器来控制 RGB LED 灯带。
// 0.1 by pmalmsten http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1176098434
// 0.2 by farkinga
// 0.3 by farkinga - adds cool behaviors
/* 0.4 by pstrobl
changed the original program to use on IR Kit For Arduino Model: DFR0107 32 bit controller.
All keypresses are sent to the serial monitor at 9600 baud.
pulseIn is always HIGH. The phototransistor in the kit does not invert the signal.
uses pin 13 for heartbeat debug
32 bits requires a long variable, so divided up into two 15 bit so can use integer variables
use the first 15 bits of the 32 bits for remote and data stream verification. This code is always the same for every button press
use the last 15 of the 32 bits for button press selection. This code changes for each button.
ignore the middle 2 bits, it never changes.
*/
#define IR_BIT_LENGTH 32 // number of bits sent by IR remote
#define FirstLastBit 15 // divide 32 bits into two 15 bit chunks for integer variables. Ignore center two bits. they are all the same.
#define BIT_1 1500 // Binary 1 threshold (Microseconds)
#define BIT_0 450 // Binary 0 threshold (Microseconds)
#define BIT_START 4000 // Start bit threshold (Microseconds)
#define IR_PIN 4 // IR Sensor pin
#define LED_PIN 13 // LED goes off when signal is received
int debug = 0; // flag as 1 to output raw IR pulse data stream length in microseconds
int output_verify = 0; // flag as 1 to print decoded verification integers. same number for all buttons
int output_key = 0; // flag as 1 to print decoded key integers
int remote_verify = 16128; // verifies first bits are 11111100000000 different remotes may have different start codes
int Blue_Bright=0;
int Red_Bright=0;
int Green_Bright=0;
int RedPin = 10;
int GreenPin = 11;
int BluePin = 9;
boolean Blue_flag=false;
boolean Red_flag=false;
boolean Green_flag=false;
boolean Flash_flag=false;
void setColor(int red, int green, int blue)
{
analogWrite(RedPin, red);
analogWrite(GreenPin, green);
analogWrite(BluePin, blue);
}
void setup()
{
pinMode(LED_PIN, OUTPUT); //This shows when ready to recieve
pinMode(IR_PIN, INPUT);
digitalWrite(LED_PIN, LOW);
pinMode(RedPin, OUTPUT);
pinMode(GreenPin, OUTPUT);
pinMode(BluePin, OUTPUT);
Serial.begin(9600);
}
void loop()
{
digitalWrite(LED_PIN, HIGH);
int key = get_ir_key();
digitalWrite(LED_PIN, LOW); // turn LED off while processing response
do_response(key);
if (Flash_flag)
{
for (int i=0;i<255;i++)
{
setColor(i, 0, 255-i);
delay (10);
}
for (int i=0;i<255;i++)
{
setColor(255-i, i, 0);
delay (10);
}
for (int i=0;i<255;i++)
{
setColor(0, 255-i, i);
delay (10);
}
}
else
{
if (Blue_flag)analogWrite(BluePin, Blue_Bright);else analogWrite(BluePin, 0);
if (Red_flag)analogWrite(RedPin, Red_Bright);else analogWrite(RedPin, 0);
if (Green_flag)analogWrite(GreenPin, Green_Bright);else analogWrite(GreenPin, 0);
}
delay(130); // 2 cycle delay to cancel duplicate keypresses
}
/*
wait for a keypress from the IR remote, and return the
integer mapping of that key (e.g. power button on remote returns
the integer 1429)
*/
int get_ir_key()
{
int pulse[IR_BIT_LENGTH];
int bits[IR_BIT_LENGTH];
do {} //Wait for a start bit
while(pulseIn(IR_PIN, HIGH) < BIT_START);
read_pulse(pulse);
pulse_to_bits(pulse, bits);
RemoteVerify(bits);
return bits_to_int(bits);
}
/*
use pulseIn to receive IR pulses from the remote.
Record the length of these pulses (in ms) in an array
*/
void read_pulse(int pulse[])
{
for (int i = 0; i < IR_BIT_LENGTH; i++)
{
pulse[i] = pulseIn(IR_PIN, HIGH);
}
}
/*
IR pulses encode binary "0" as a short pulse, and binary "1"
as a long pulse. Given an array containing pulse lengths,
convert this to an array containing binary values
*/
void pulse_to_bits(int pulse[], int bits[])
{
if (debug) { Serial.println("-----"); }
for(int i = 0; i < IR_BIT_LENGTH; i++)
{
if (debug) { Serial.println(pulse[i]); }
if(pulse[i] > BIT_1) //is it a 1?
{
bits[i] = 1;
}
else if(pulse[i] > BIT_0) //is it a 0?
{
bits[i] = 0;
}
else //data is invalid...
{
Serial.println("Error");
}
}
}
/*
check returns proper first 14 check bits
*/
void RemoteVerify(int bits[])
{
int result = 0;
int seed = 1;
//Convert bits to integer
for(int i = 0 ; i < (FirstLastBit) ; i++)
{
if(bits[i] == 1)
{
result += seed;
}
seed *= 2;
}
if (output_verify)
{
Serial.print("Remote ");
Serial.print(result);
Serial.println(" verification code");
}
if (remote_verify != result) {delay (60); get_ir_key();} //verify first group of bits. delay for data stream to end, then try again.
}
/*
convert an array of binary values to a single base-10 integer
*/
int bits_to_int(int bits[])
{
int result = 0;
int seed = 1;
//Convert bits to integer
for(int i = (IR_BIT_LENGTH-FirstLastBit) ; i < IR_BIT_LENGTH ; i++)
{
if(bits[i] == 1)
{
result += seed;
}
seed *= 2;
}
return result;
}
/*
respond to specific remote-control keys with different behaviors
*/
void do_response(int key)
{
if (output_key)
{
Serial.print("Key ");
Serial.println(key);
}
switch (key)
{
case 32640: // turns on UUT power
if (Blue_flag|Red_flag|Green_flag){Blue_flag=false;Red_flag=false;Green_flag=false;Flash_flag=false;}
else {Blue_flag=true;Red_flag=true;Green_flag==true;}
Serial.println("POWER");
break;
case 32385: // FUNC/STOP turns off UUT power
Serial.println("FUNC/STOP");
break;
case 32130: // |<< ReTest failed Test
Serial.println("|<<");
break;
case 32002: // >|| Test
Serial.println(">||");
break;
case 31875: // >>| perform selected test number
Serial.println(">>|");
break;
case 32512: // VOL+ turns on individual test beeper
Serial.println("VOL+");
break;
case 31492: // VOL- turns off individual test beeper
Serial.println("VOL-");
break;
case 31620: // v scroll down tests
if (Blue_flag==true&&Blue_Bright>10)Blue_Bright-=10;
if (Red_flag==true&&Red_Bright>10)Red_Bright-=10;
if (Green_flag==true&&Green_Bright>10)Green_Bright-=10;
Serial.println("v");
break;
case 31365: // ^ scroll up tests
if (Blue_flag==true&&Blue_Bright<245)Blue_Bright+=10;
if (Red_flag==true&&Red_Bright<245)Red_Bright+=10;
if (Green_flag==true&&Green_Bright<245)Green_Bright+=10;
Serial.println("^");
break;
case 30982: // EQ negative tests internal setup
Serial.println("EQ");
break;
case 30855: // ST/REPT Positive tests Select Test and Repeat Test
Serial.println("ST/REPT");
break;
case 31110: // 0
Serial.println("0");
break;
case 30600: // 1
Red_flag=true;
Green_flag=false;
Blue_flag=false;
Flash_flag=false;
Red_Bright=120;
Serial.println("1");
break;
case 30472: // 2
Green_flag=true;
Red_flag=false;
Blue_flag=false;
Flash_flag=false;
Green_Bright=120;
Serial.println("2");
break;
case 30345: // 3
Blue_flag=true;
Green_flag=false;
Red_flag=false;
Flash_flag=false;
Blue_Bright=120;
Serial.println("3");
break;
case 30090: // 4
Flash_flag=true;
Serial.println("4");
break;
case 29962: // 5
Serial.println("5");
break;
case 29835: // 6
Serial.println("6");
break;
case 29580: // 7
Serial.println("7");
break;
case 29452: // 8
Serial.println("8");
break;
case 29325: // 9
Serial.println("9");
break;
default:
{
Serial.print("Key ");
Serial.print(key);
Serial.println(" not programmed");
}
break;
}
}
文件
 从 DFRobot 商店或DFRobot 分销商获取RGB LED Strip Drivr Shield V1.0。
从 DFRobot 商店或DFRobot 分销商获取RGB LED Strip Drivr Shield V1.0。