简介
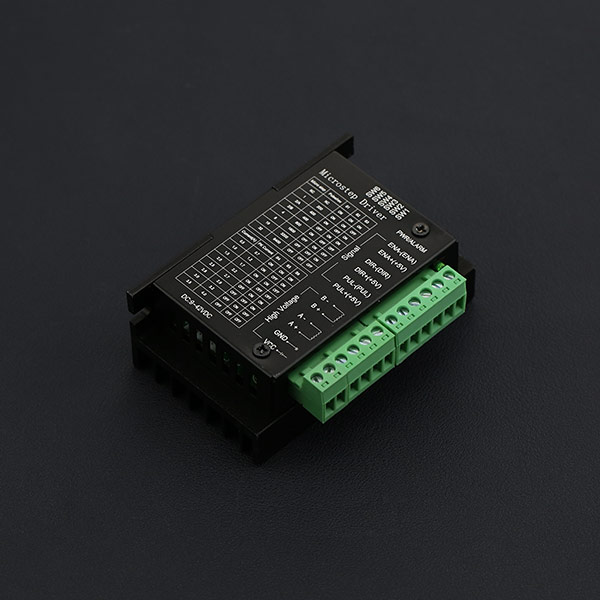
TB6600是一款专业的两相步进电机驱动器,兼容Arduino和其他多种主控器,可实现电机正反转控制,旋转角度控制等功能。
什么是步进电机驱动器?为什么需要步进电机驱动器?
步进电机驱动是一种电子设备,通常作为桥梁来连接控制器、电源和步进电机。虽然控制器的处理性能很强大,但是它本身的输出能力(电流)却很弱小。它需要一个中间桥梁去连接电机和主控,并同时为电机提供足够的电源。就好比人类的大脑,脑组织本身非常脆弱,但它可以通过给肌肉下达命令来带动整个身体。驱动器就好比人类的肌肉,是负责整个系统运动的重要环节的一部分。
TB6600步进电机驱动器采用H桥双极恒相流驱动,可直接用9~42VDC供电,可选择7档细分控制(1、2/A、2/B、4、8、16、32),8档电流控制(0.5A、1A、1.5A、2A、2.5A、2.8A、3.0A、3.5A)。最高支持4A电流输出。信号端都有配有高速光电隔离,防止信号干扰,并且支持共阴、共阳两种信号输入方式。出于安全考虑,驱动器支持脱机保持功能,能够让用户在通电状态下调试。内置温度保护和过流保护,可适应更严苛的工作环境。
驱动器适合驱动57、42型两相、四相混合式步进电机,能达到低振动、低噪声、高速度的驱动效果。可以适用于机械人控制,3D打印等高精度应用领域中。
注意:此款为最新TB6600的升级版
产品特点
- 原装全新步进电机驱动芯片
- 8档电流控制
- 7种细分可调
- 接口采用高速光耦隔离
- 自动半流减少发热量
- 大面积散热片不惧高温环境使用
- 抗高频干扰能力强
- 输入电压防反接保护
- 过热,过流短路保护
技术规格
- 输入电压: DC9-42V
- 控制信号: 3.3-24V通用(无需串电阻)
- 输入电流: 推荐使用开关电源功率5A
- 输出电流: 0.5-4.0A
- 最大功耗: 160W
- 细分: 1,2/A,2/B,4,8,16,32
- 温度: 工作温度-10~45℃;存放温度-40℃~70℃
- 湿度: 不能结露,不能有水珠
- 气体: 禁止有可燃气体和导电灰尘
- 重量: 0.2 kg
- 体积: 96 * 71 * 37 mm
快速入门
在这个环节中,我们会教您如何在5分钟内快速上手本产品。更多功能设置,请参考产品使用手册.
准备
-
硬件
- 1 x DFRduino UNO控制板
- 1 x TB6600 步进电机驱动器
- 1 x 步进电机
- 若干 杜邦线
-
软件
- Arduino IDE (版本要求:最新), 点击下载Arduino IDE
接线图

| ⚠Tips:不同步进电机的线序可能也各有不同,如何快速区分步进电机的两组引脚? |
|---|
| 万用表直接测量阻值,相同的线圈是相互导通的 |
| 任意两根接线相连,当你发现输出轴被完全锁死时,相互接触的两根线为同一线圈的两端(其他接法均会出现转动的状态)。 |
- 本次使用一个42步进电机,步角距1.8°,额定电流1.7A
- 依据步进电机参数调节限流大小:1.7A
- 根据需求调节细分数:32
- 按图接线
- 外接9~42V直流电源(不能小于9V)
注意:拨码开关向下表示”ON“
样例代码
/*!
* @file DRI0043.ino
* @brief TB6600是一款专业的两相步进电机驱动器,兼容Arduino和其他多种主控器,可实现电机正反转控制,旋转角度控制等功能。
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author DFRobot
* @version V1.0
* @date 2023-08-03
*/
int PUL = 7; //define Pulse pin
int DIR = 6; //define Direction pin
int ENA = 5; //define Enable Pin
void setup() {
pinMode (PUL, OUTPUT);
pinMode (DIR, OUTPUT);
pinMode (ENA, OUTPUT);
}
void loop() {
for (int i = 0; i < 6400; i++) //Forward 6400 steps
{
digitalWrite(DIR, LOW);
digitalWrite(ENA, HIGH);
digitalWrite(PUL, HIGH);
delayMicroseconds(50);
digitalWrite(PUL, LOW);
delayMicroseconds(50);
}
for (int i = 0; i < 6400; i++) //Backward 6400 steps
{
digitalWrite(DIR, HIGH);
digitalWrite(ENA, HIGH);
digitalWrite(PUL, HIGH);
delayMicroseconds(50);
digitalWrite(PUL, LOW);
delayMicroseconds(50);
}
}
结果
步进电机正转一圈(6400步),然后反转一圈(6400步),依次循环。
解释说明
- Enable是脱机引脚,当管脚置高时(或者不接时),电机正常使用;当管脚置低时,电机可任意转动
- Direction为方向引脚,低电平正转;高电平反转
- PULSE为脉冲管脚,驱动器每收到一个脉冲,电机就走一步
扩展阅读
什么是步进电机细分数?
步进电机的细分技术实质上是一种电子阻尼技术,其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。比如对于步进角为1.8°的两相混合式步进电机,如果细分驱动器的细分数设置为32,那么电机的运转分辨率为每个脉冲1.8/32=0.05625°,电机的精度能否达到或接近0.05625°,还取决于细分驱动器的细分电流控制精度等其它因素。不同厂家的细分驱动器精度可能差别很大;细分数越大精度越难控制。那么在32细分下,步进电机转一圈需要走360°/0.05625°=6400步。
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
