简介
这是一款融合ToF深度感知与高清RGB成像的RGBD深度智能相机,专为实时3D场景设计。其搭载了分辨率640×480的ToF图像传感器和分辨率1920×1080的彩色图像传感器,利用ToF技术获取物体和空间的三维信息,其核心优势在于远距离,高精度,低功耗的特点与多模态数据融合能力,为用户提供便捷高效的3D感知能力。紧凑机身适配嵌入式部署,并提供AI识别案例,可实时解析复杂场景中的目标物属性。
兼容Windows/Linux(Ubuntu)/ROS等主流操作系统,通过Type-C接口搭配上位机同时输出深度图像和2D彩色图像信息,支持3D点云和2D彩色图像融合,同时,提供SDK和示例,可以快速进行二次开发。可广泛应用于机器人SLAM、体积测量、体感互动,3D建模、安防/人员计数等等应用场景中。
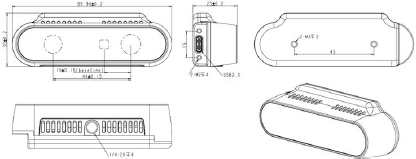
尺寸
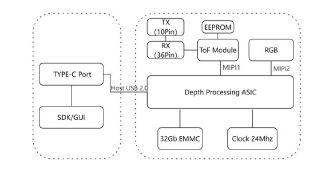
系统框图
特点
- 厘米级测量精度
- 测量范围:0.1~5m@90% Ref
- 支持RGBD融合
- 支持切换深度/彩色图像分辨率
适用场景
- 机器人避障
- 工业视觉
- 体积测量
- 活体检测
- 体感互动
- 3D建模
技术规格
- 深度图像
- 分辨率:640×480/320×240
- FOV:H100°×V75°
- 彩色图像
- 分辨率:1920×1080/640×480
- FOV:H97°×V95.5°
- RGB fusion
- 分辨率:1920×1080
- FOV:H91.5°×V59°
- 工作距离:0.1~5m,indoor
- VCSEL波长:940nm
- 精度:0.1~0.5m: ±2.5cm; 0.5~5m: ±1% @ 90% reflectivity
- 供电方式:5V/0.6A
- 功耗:3W
- 操作系统:Windows10/11,Ubuntu,ROS
- 安全性:CLASS1
- 工作温度:-10~50℃
- 尺寸:90×25×25mm
SDK使用教程
!!!使用Linux系统的SDK时,请勿在Windows上进行解压,否则会对依赖库造成破坏
!!!在Windows上使用CS30时需要安装驱动,驱动下载
Linux系统教程
64位系统为armv8 SDK,32位系统为armv7 SDK
Server系统,解压SDK,切换到bin目录
cd */bin
sudo /run.sh
显示Get Depth Success FPS:xx,运行成功
Desktop系统,
1、解压SDK,进入bin目录
cd */bin
2、修改run.sh文件
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:../../lib:../thirdpart/opencv440/lib
./SDKTest
3、执行命令
sudo /run.sh
以上是简单Linux系统教程
详细使用教程和接入指南请参考,SDK开发指南
常见问题
对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖
更多
[你是懂的!-DFRobot 商城]
跳至首行