
简介
DFRobot最新推出彩色LED灯带,由一系列的彩色LED组成。通上电源,房间就能被色惨斑斓灯光所充盈。模块支持5V供电,采用了性能更好的晶体管开关,配上4米40灯的彩色柔性灯带,可一装点房间,烘托气氛,实现你的无限创意。
⚠注意:请勿将灯带脱离驱动板,单独接在电源上,否侧将会损坏灯珠!
产品参数
- 工作电压: 2.5~5V (建议5V供电)
- 尺寸: 30*22(mm)
- LED灯带:4米40灯
引脚说明

| 标号 | 名称 | 功能描述 |
|---|---|---|
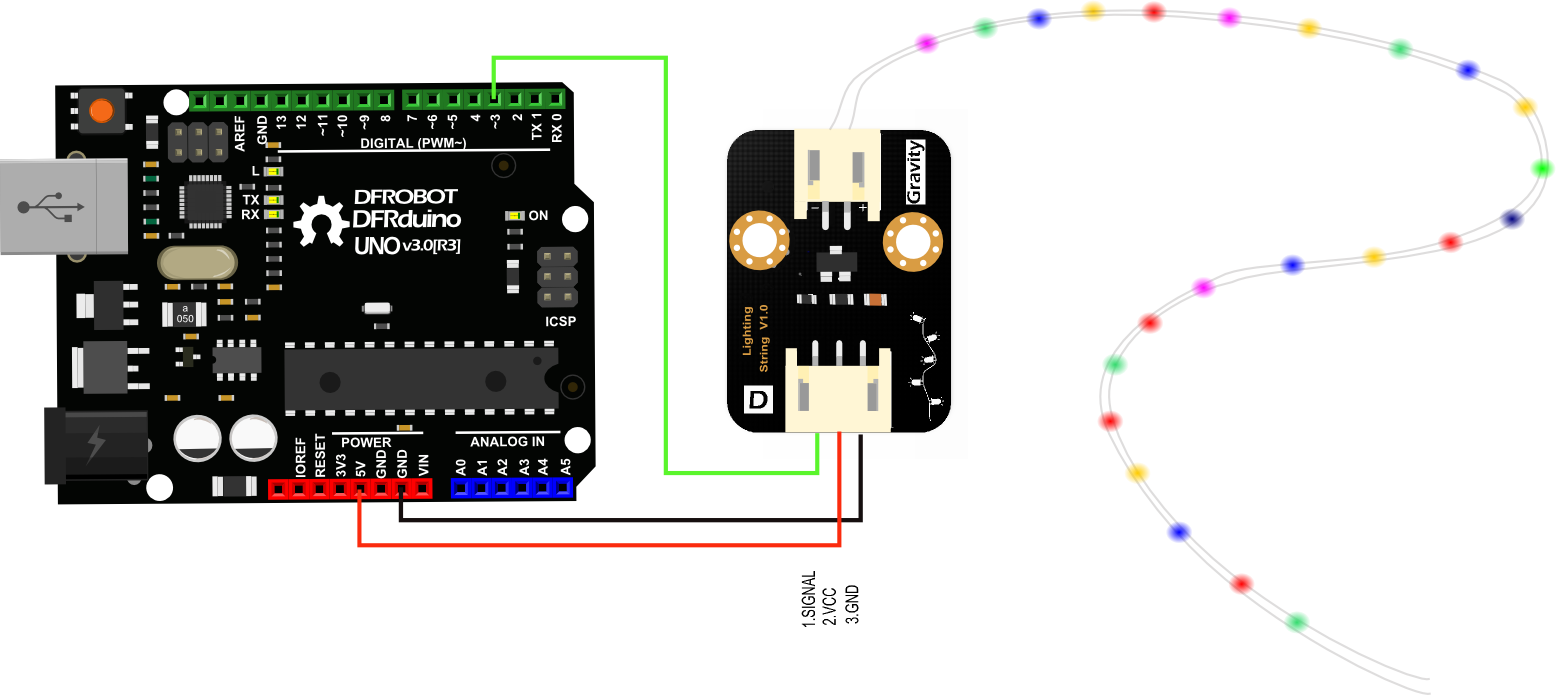
| 1 | signal | 控制信号输入端 |
| 2 | VCC | 电源+ |
| 3 | GND | 电源- |
准备
-
硬件
- Arduino UNO x1
- Lighting String LED灯带驱动模块 x1
- 4米40灯暖白色LED灯带 x1
- 杜邦线 若干
-
软件
- Arduino IDE 点击下载Arduino IDE
接线图
样例代码
/***************************************************
Light string
* ****************************************************
Control an Light string on like a Breathing LED, repeatedly.
@author Dongzi(1185787528@qq.com)
@version V1.0
@date 2016-5-26
All above must be included in any redistribution
* ****************************************************/
int t;
#define Light_string 3
void setup() {
pinMode( Light_string, OUTPUT);
}
void loop() {
for (t = 5; t < 255; t++ ) // turn the Light string on (HIGH is the voltage level) little and little.
{
analogWrite( Light_string, t);
delay(10);
}
if (t >= 255) // turn the Light string off (HIGH is the voltage level) little and little.
{
for (t == 255; t > 5; t--)
{
analogWrite( Light_string, t);
delay(10);
}
}
}
Mind+ 上传模式编程
- 下载及安装软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
- 切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程
- “扩展”中选择“主控板”中的“Arduino Uno”。 详细教程:Mind+基础wiki教程-加载扩展库流程
- 进行编程,程序如下图:
- 菜单“连接设备”,“上传到设备”

结果
程序烧录后 灯带出现呼吸灯效果
Mind+ Python模式编程(行空板)
Mind+Python模式为完整Python编程,因此需要能运行完整Python的主控板,此处以行空板为例说明
连接图

操作步骤
1、下载及安装官网最新软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、切换到“Python模式”。“扩展”中选择“官方库”中的“行空板”和“pinpong库”中的”pinpong初始化“。切换模式和加载库的详细操作链接
3、进行编程
4、连接行空板,程序点击运行后,可在终端查看数据。行空板官方文档-行空板快速上手教程 (unihiker.com)

代码编程
以pinpong库为例,行空板官方文档-行空板快速上手教程 (unihiker.com)
# -*- coding: UTF-8 -*-
# MindPlus
# Python
from pinpong.extension.unihiker import *
from pinpong.board import Board,Pin
from pinpong.board import Board
import time
Board().begin()
p_p21_pwm=Pin(Pin.P21, Pin.PWM)
while True:
while not ((my_variable >= 1023)):
my_variable = (my_variable + 1)
p_p21_pwm.write_analog(my_variable)
time.sleep(0.01)
while not ((my_variable <= 0)):
my_variable = (my_variable - 1)
p_p21_pwm.write_analog(my_variable)
time.sleep(0.01)
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖!
