简介
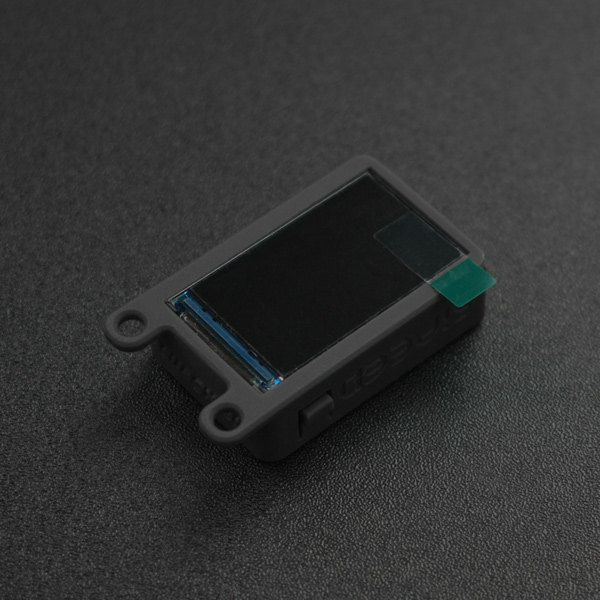
3D TOF深度相机是由BL702 + 炬佑100x100 TOF所组成的可测量最大1.5m距离的3D传感器,最大支持100×100的分辨率和8位精度,并带有1.14英寸LCD屏可实时预览colormap 后的深度图,模组上电即用,拥有UART接口和Type-C接口。支持ROS系统(ROS1+ROS2),可以快速获取深度数据和深度图。
适用于物联网应用的一体化、低成本、灵活易用的3D ToF(飞行时间)解决方案。它集成了以下算法:具体应用于测距、多区域人体定位传感、姿势监测、姿势控制、关键校正等。这些功能被广泛应用于白色家电、激光电视、智能投影仪、智能照明、智能停车、智能家居设施等众多应用中。


准备工作
采用串口协议对外提供接口以及传输数据。提供的物理接口有 type-c(虚拟串口)及 1.0mm 4pin 母座(UART)都能获取深度图数据用于集成。
接线说明
通过 type-c 接口连接 PC 端后,可以识别到 /dev/ttyUSBx(Linux)或 COMx(Windows)。

还可通过 usb2ttl 模组按照硬件引脚图(设备屏幕正面朝下)连接 4pin 母座。
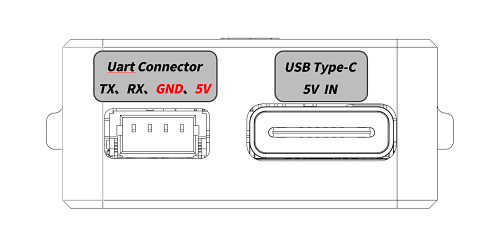
| SEN0581 | TX | RX | GND | 5V |
|---|---|---|---|---|
| TTL模块 | RX | TX | GND | 5V |
上电互动预览
按键功能:左侧为“下一个”右侧为“切换”.
屏幕显示:屏幕中心的 + 字是测距点,右上方会实时显示 xx cm 代表测距的距离。如镜头前近处有大面积物体时屏幕右上会显示 “block!”而其他情况为 “open!”.
将设备接入电源后,可在设备上自带 LCD 屏实时预览 color map 后的深度伪彩图。

PC 互动预览
在 PC 端上预览修改配置前需要先安装上位机软件 COMTOOL.
COMTOOL/Windows 系统:comtool_windows
COMTOOL/Linux 系统:需用户自行编译/点击跳转
注意:Win 7 及以下系统需装驱动,可自行前往 FTDI 官网下载。
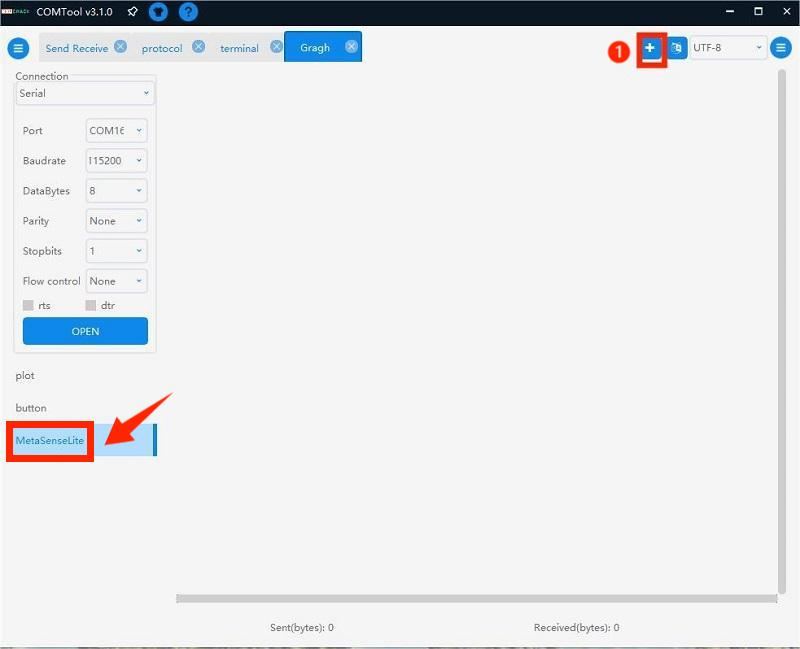
打开 COMTOOL 软件后选择 Graph 界面,如果软件上方无 Graph 的话可在右上角 + 号处添加 Graph,创建后若居中
部分为白无图,则双击左下角 MaixSenseLite 即可打开界面显示端口。
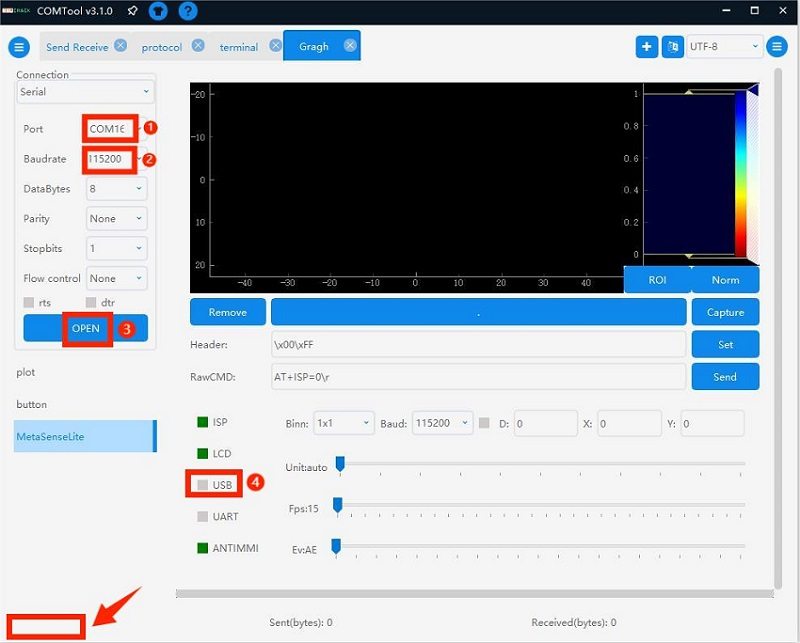
在左侧 Port 选择小的端口和对应波特率(任意选择高波特率),点击 open 后再勾选下方 USB 即可接收大量数据,左
下角处会显示 Connected.
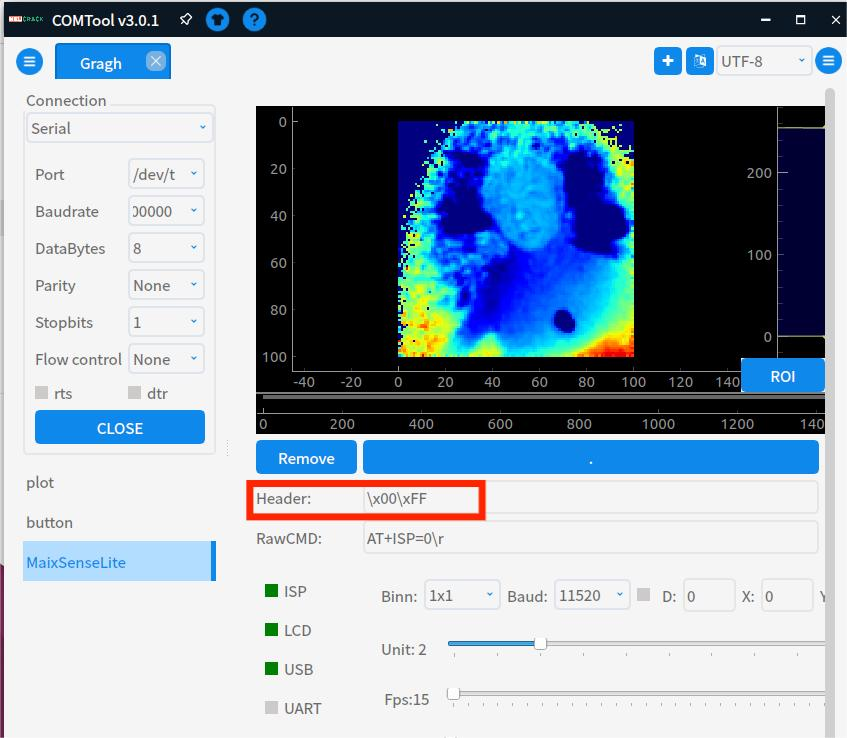
设定 Header 为 \x00\xFF 即可解析正确的图像数据并观察到深度图,可以直观感受二维平面图像上的深度。
互动配置说明
COMTOOL 上位机的配置控件说明
- Header:设置识别包头
- RawCMD:用户可以手动发送指令(USB 和 UART 串口行为相同)
- ISP:启动停止
- LCD:显示自带屏的开启关闭
- USB:串口传输深度图开启关闭
- UART:串口传输深度图开启关闭
- ANTIMMI:自动抗多机干扰开启关闭(易受干扰,关闭的效果都要更好些)
- Binn:可下拉设置 BINNING,Baud 设置 UART 波特率
- X、Y:设置坐标:D 左侧多选框开启后显示出该摄像头的距离。
- Unit:设置量化单位(16位量化到8位,比例缩小,设置太小的话会只能看清很近处的影像)
- FPS:设置出图帧率(不宜过高,根据对接设备的性能合理设置即可,减小帧率可以减少传输数据量)
- Ev:曝光间隙控制(最左代表 AE,其他是固定曝光时间)
案例
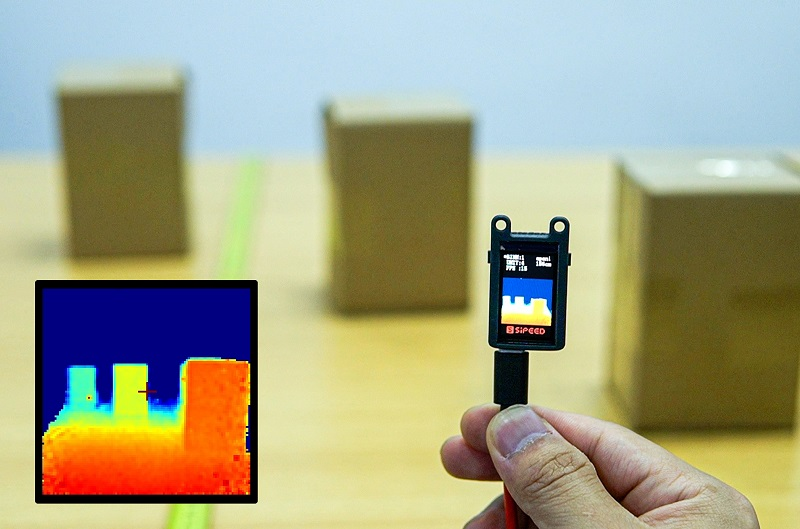
远近中物体实拍
设备自带 LCD 屏上电后可实时观察到远近中物体的深度值差异。物体不同的放置位置形成距离的差异,设备捕捉到
差异后转化为深度值并因距离的远近显示冷暖色调。
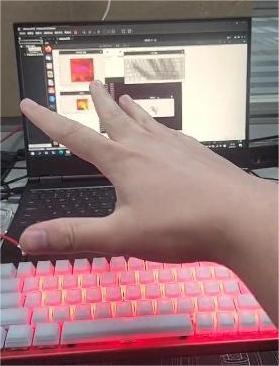
键盘灯跟随
实现超酷炫的键盘灯跟随,设备实时跟踪手部的位置变化,再根据手部的位置映射键盘灯。键盘灯相关代码支持:点击查看.rar
二次开发:串口协议
二次开发:接入ROS
1.接入 ROS1
准备工作
运行 ROS 前我们要准备适用的环境:Linux 系统。
可使用虚拟机 virtual box 或者 vmware:点击获取
也可以自行安装双系统,安装方法请自行搜索或参考右侧:双系统安装教程
安装运行
ROS 接入包:sipeed_tof_ms_a010_ros_v0.3.zip
#解压缩 sipeed_tof_ms_a010.zip,并进入目录
cd ros1
source /opt/ros/*/setup.sh
catkin_make
source devel/setup.sh
rosrun sipeed_tof_ms_a010 a010_publisher _device:="/dev/ttyUSB0"
#之后终端会持续刷新显示[sipeed_tof]: Publishing,即正常工作
可自行在 RQT 查看帧率
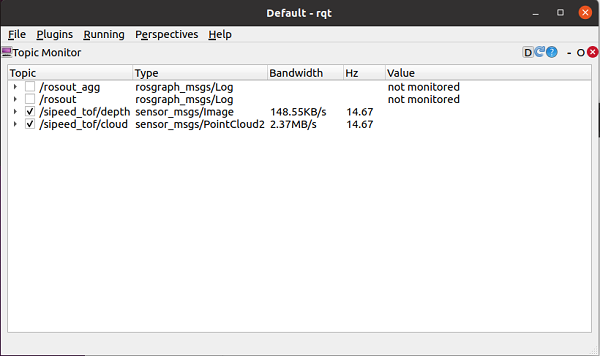
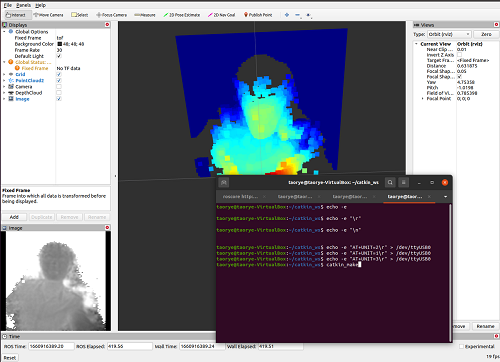
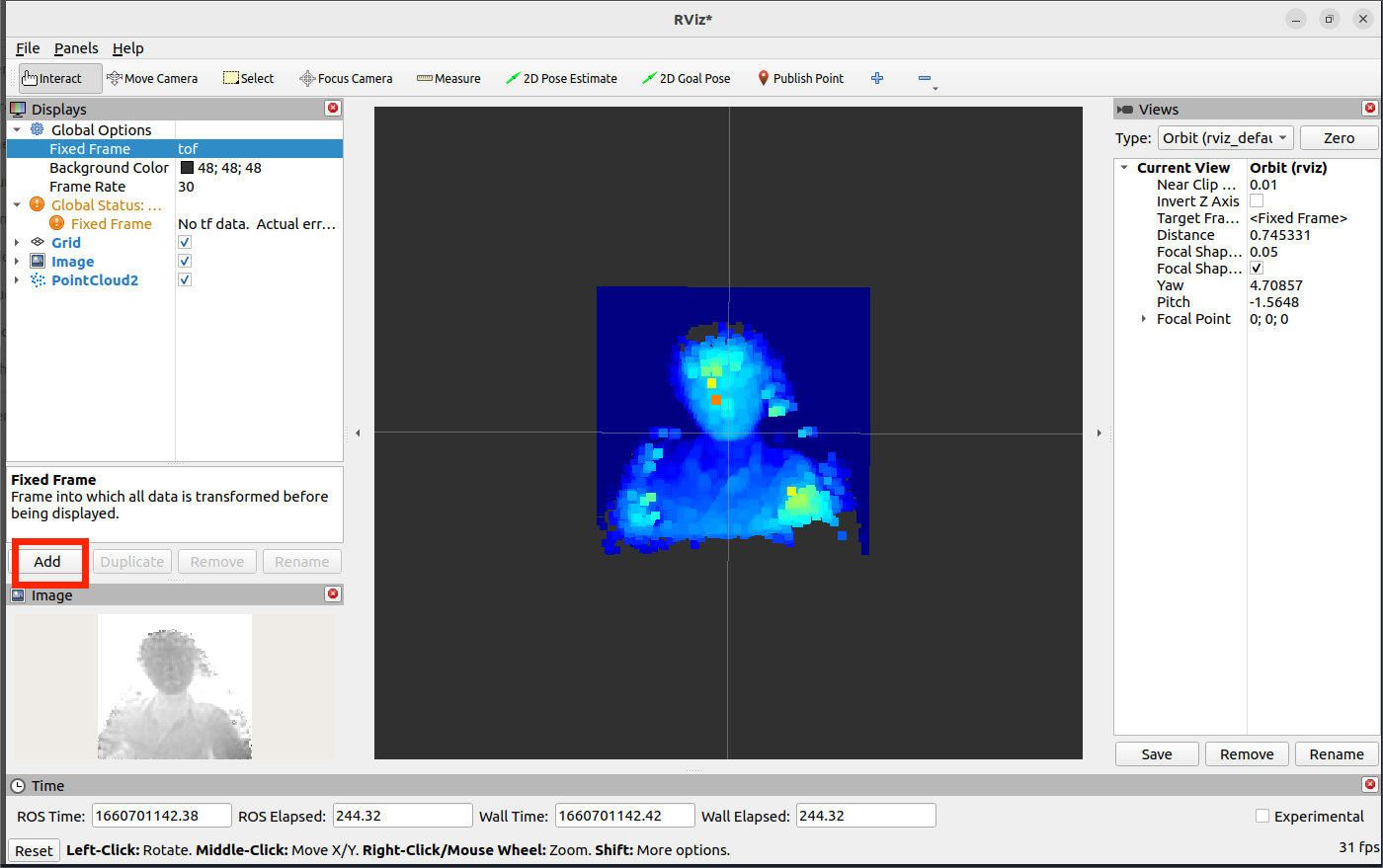
RVIZ2 预览
打开 rviz2 后,在界面左下角的 Add->By topic->PointCloud2或/depth ->Image 添加 ->Display/Global Options/Fixed Frame 需要修改成 tof,才能正常显示点云,根据添加的内容,左侧会显示 Image 而中间则显示点云。
2.接入 ROS2
准备工作
运行 ROS 前我们要准备适用的环境:Linux 系统。
可使用虚拟机 virtual box 或者 vmware:点击获取
也可以自行安装双系统,安装方法请自行搜索或参考右侧:双系统安装教程
注:如果环境同时安装了 ROS1,使用 ROS2 的话需要选额外择正确的版本。
ls /opt/ros
ros@ros-virtual-machine:~/Desktop$ ls /opt/ros
noetic rolling
安装运行
我们提供了 ROS2 的接入功能包,用户需要在运行 ROS2 的系统上编译安装。
ROS 接入包:sipeed_tof_ms_a010_ros_v0.3.zip
#解压缩sipeed_tof_ms_a010.zip,并进入目录
cd ros2
source /opt/ros/*/setup.sh
colcon build #(如提示缺少colcon时需要sudo apt install python3-colcon-ros)
source install/setup.sh
ros2 run sipeed_tof_ms_a010 publisher --ros-args -p device:="/dev/ttyUSB0"
#之后终端会持续刷新显示[sipeed_tof]: Publishing,即正常工作
RQT 查看帧率
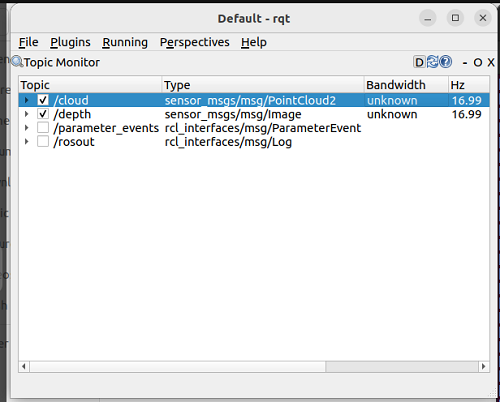
RVIZ2 预览
打开 rviz2 后,在界面左下角的 Add->By topic->PointCloud2或/depth ->Image 添加 ->Display/Global Options/Fixed Frame 需要修改成 tof,才能正常显示点云,根据添加的内容,左侧会显示 Image 而中间则显示点云。