简介
这款搭载了分辨率为 640*480 的 ToF图像传感器,利用 ToF 技术获取物体和空间的三维信息,具备远距离,低功耗等优良性能,为用户提供便捷高效的 3D 感知能力。
该产品通过 Type C 接口供电并输出相位信息,用户可通过SDK获取depth、point cloud 等数据。可用于机器人SLAM、体积测量、活体检测、体感互动、3D 建模、安防监控/人数统计等场景,兼容Linux/Windows/ROS/Android多种操作系统。
相比于3D结构光相机,TOF深度相机区别在于,盲区小,测量误差是呈线性的,距离近远、场景纹理丰富与否都不影响测量,成像速度较快,抗环境能力较强,劣势在于深度分辨率都比较低,在捕捉深度信息不精细,价格相对较高,但这款在性价比和3D成像方面表现都不错。
特性
- 可达毫米级测量精度
- 典型测量范围:0.1-5 米@室内白墙
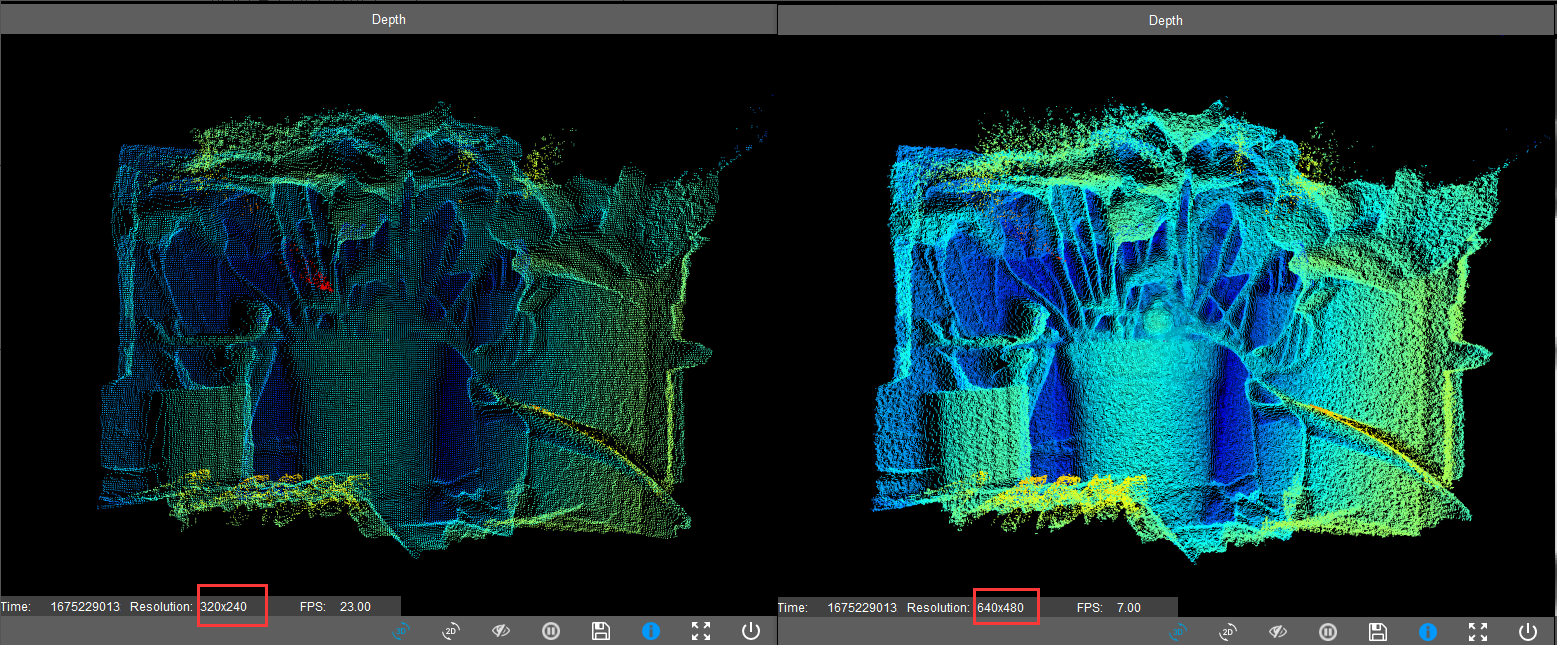
- 分辨率:640 x 480(7FPS), 320 x 240(15FPS)
- 高动态测量范围
- 支持深度、信号幅度时序同步
- 可调整量程和帧率
技术规格
- 型号:CS20
- Depth分辨率:640x480 @7FPS /320x240 @15FPS
- 量程范围:0.1-5m, 室内
- VCSEL 波长:940nm
- 精度:1% @白墙
- FOV :H60° x V45°(Receiver)
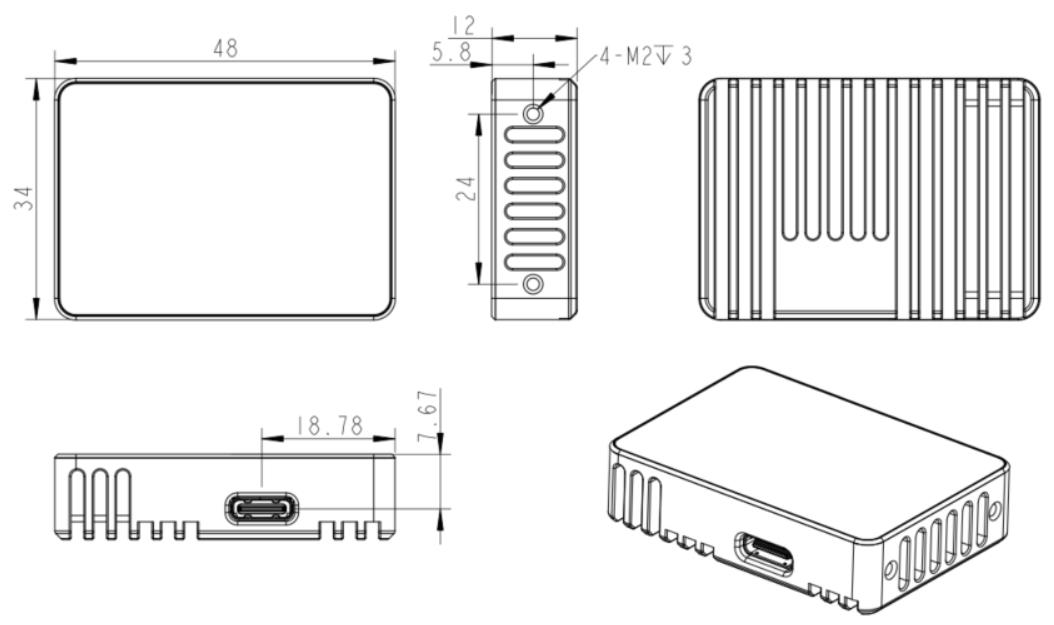
- 尺寸:48mm x 34mm x 12mm
- 数据传输:USB 2.0 ,Type C Interface
- 供电方式:5V, 0.5A
- 功耗平均功耗:1.2W
- 操作系统:Linux/Windows/ROS/Android
- 工作温度:-10 ~ 50℃
- 安全性:Class 1
产品形态
产品外观
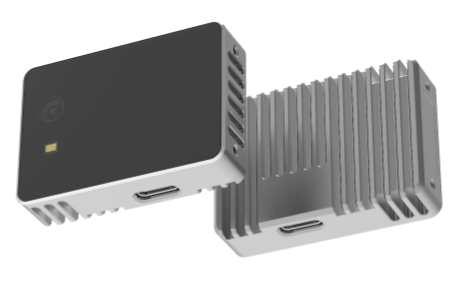
产品说明

尺寸图
适用场景
高分辨率640*480主打静态物体测量,例如体积测量。若有动态场景下使用的需求,例如人数统计,欢迎在我们产品页面下留言,根据需求,考虑上架高速无拖影升级版,并可以提供一定的实例Demo。
- 机器人 SLAM
- 体积测量
- 活体检测
- 体感互动
- 3D 建模
- 安防监控/人数统计
开发资料
- https://support.tofsensors.com/product/CS20.html
实测3D点云效果
分辨率对比3D点云图
放大细节3D点云图(640*480)
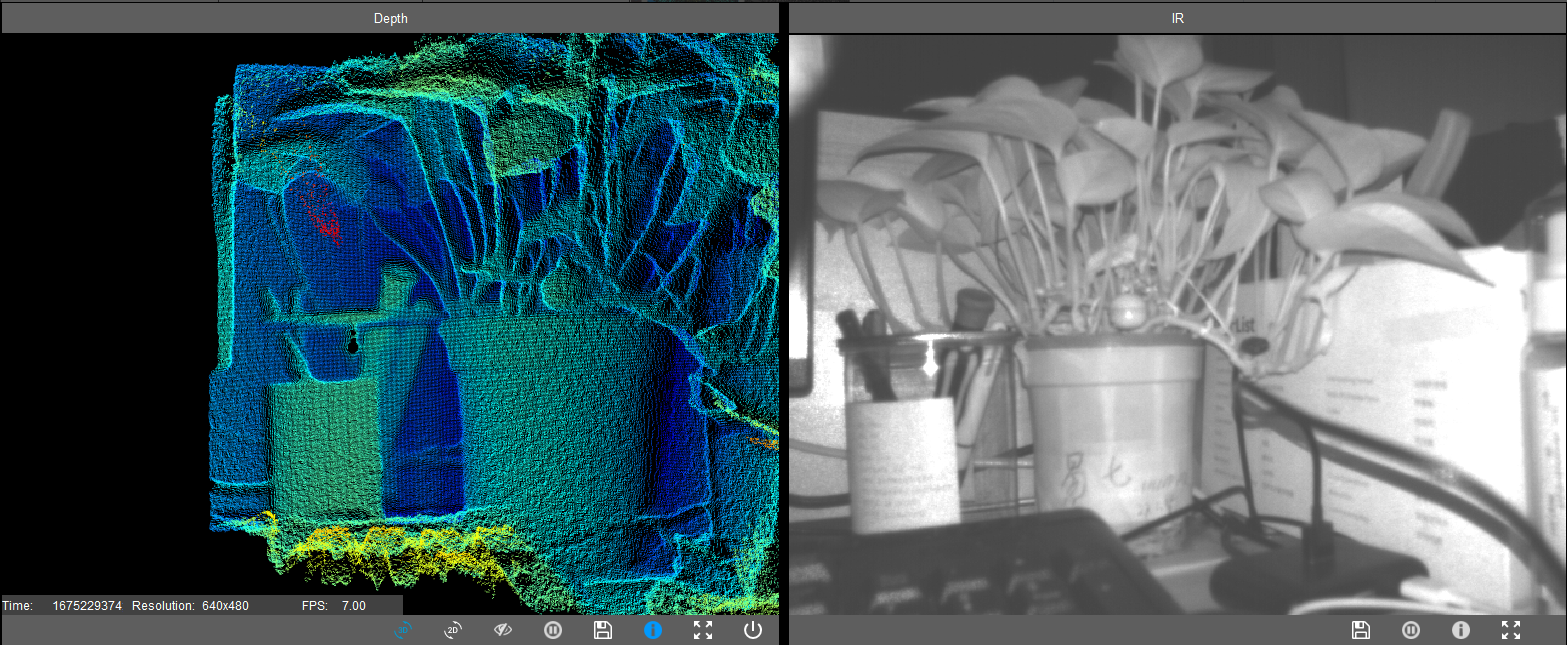
黑暗环境3D点云图(抽屉)

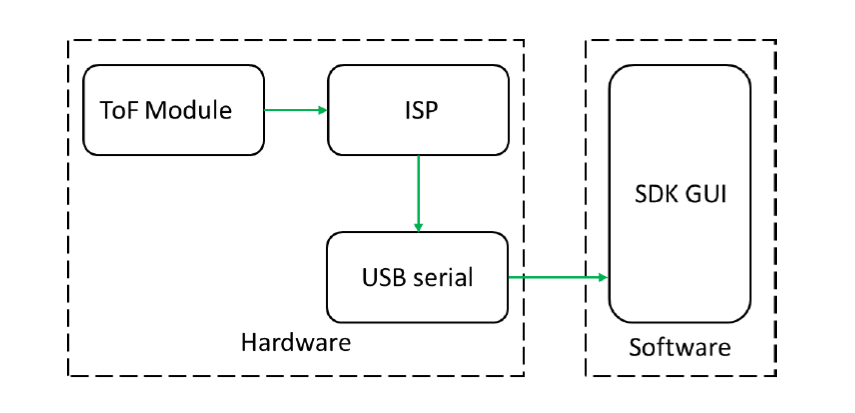
系统架构
注意事项
- 请勿用其他热源加热此产品;
- 请勿摔落、撞击或拆解本产品,以防内部组件损坏及精度下降;
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖
更多
[你是懂的!-DFRobot 商城]
跳至首行