简介
这是一款高灵敏度的24GHz人体存在状态感应雷达模组。其工作原理是利用FMCW调频连续波,对设定空间内的人体目标进行探测,结合雷达信号处理、精确人体感应算法,实现高灵敏度的人体存在状态感应,可识别运动和静止状态下的人体,并可计算出目标的距离等辅助信息。模组感应效果不受温度、亮度、湿度和光线波动等周围环境影响,并且具有良好的外壳穿透性,可隐藏在外壳里面工作,无需在产品表面开孔。
这款微波雷达主要应用在室内场景,感知区域内是否有运动或者微动的人体,实时输出检测结果。最远感应距离可达6米,距离分辨率0.75m。提供串口通信协议,可配置感应距离范围、不同区间的感应灵敏度和无人延时时间等,适应不同的具体应用需求。
支持UART 和GPIO(高低电平)输出,搭配Arduino控制器或者其他控制器,可以灵活应用到项目中,例如人体感应灯控、广告屏人体感应唤醒、UV灯控、家庭安防等。
特性
- 5~12V宽电压供电
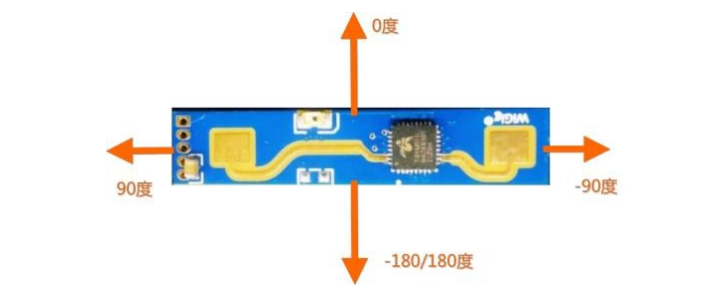
- 高灵敏度、120°宽探测角
- 最远感应距离可达6米,可输出距离值
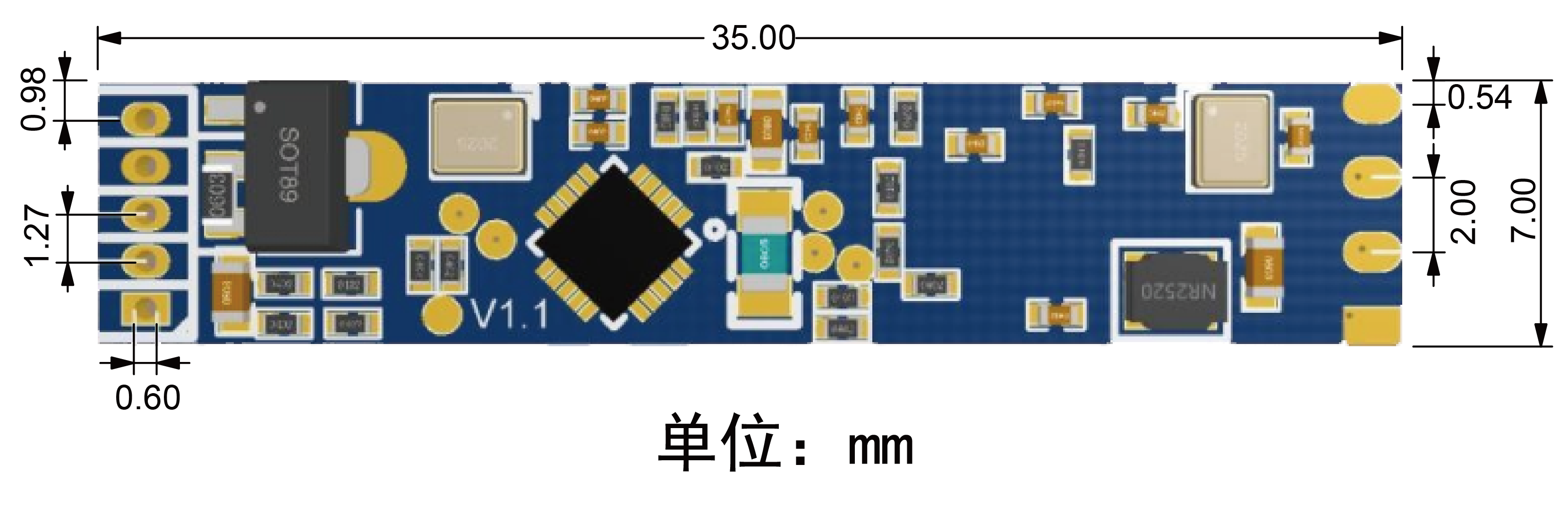
- 7mm*35mm,窄小体积,易嵌入边框
- 支持 GPIO 和 UART 输出,即插即用
技术规格
- 额定电压:5V
- 工作频段:24GHz~24.25GHz
- 调制方式:FMCW
- 工作电压:DC5V~12V
- 平均工作电流:80mA
- 探测距离:0.75m~6m(实测盲区距离30cm)
- 探测角度:±60°
- 输出接口:UART & GPIO(3.3V)
- 默认波特率:57600(256000最佳)
- 距离分辨率:0.75m
- 扫频带宽:250MHz
- 环境温度:-40~85℃
- 尺寸:7mm*35mm
- 转接线:SH 1.27mm - 杜邦母口2.54
注:工作频段和扫描频率均符合FCC、CE、无委会认证标准
尺寸图
模块背面
引脚说明
模块正面

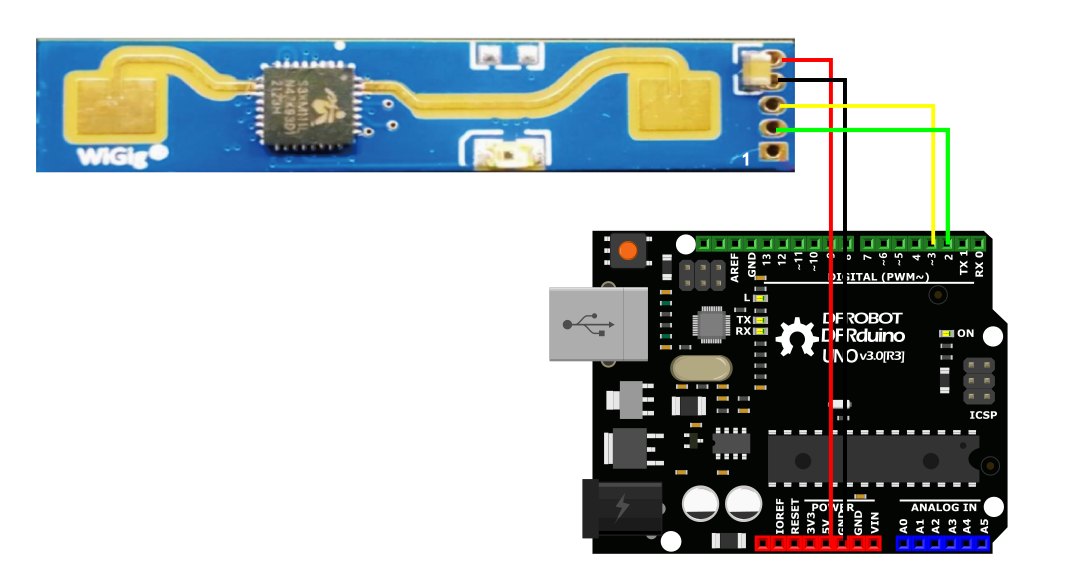
| 配线颜色 | 名称 | 功能描述 |
|---|---|---|
| 蓝色 | OUT | 目标状态输出,检测到有人:输出高电平(3.3V)无人:输出低电平(0V) |
| 绿色 | UART_Tx | 串口Tx,发送数据 |
| 黄色 | UART_Rx | 串口Rx,接收数据 |
| 黑色 | GND | 电源地 |
| 红色 | VCC | 供电输入 |
Arduino 使用教程
准备
-
硬件
Arduino UNO x1
24GHz 微波感应雷达模组 x1
转接线 x1
- 软件
Arduino IDE,点击下载 Arduino IDE
接线图
读取探测距离值(Demo)
#include <SoftwareSerial.h>
SoftwareSerial mySerial(2, 3); //定义软串口,3号端口为TX,2号端口为RX,
size_t readN(uint8_t *buf, size_t len);
bool recdData(uint8_t *buf);
uint8_t Cache[23] = {0}; //缓存
void setup()
{
Serial.begin(115200); //串口波特率
mySerial.begin(57600); //软串口
//Serial1.begin(256000);
}
void loop()
{
recdData(Cache);
}
size_t readN(uint8_t *buf, size_t len)
{
size_t offset = 0, left = len;
int16_t Tineout = 1500;
uint8_t *buffer = buf;
long curr = millis();
while (left) {
if (Serial1.available()) {
//buffer[offset] = Serial1.read();
buffer[offset] = Serial.read();
offset++;
left--;
}
if (millis() - curr > Tineout) {
break;
}
}
return offset;
}
bool recdData(uint8_t *buf)
{
int16_t Tineout = 50000;
long curr = millis();
uint8_t ch;
bool ret = false;
const char *P;
while (!ret) {
if (millis() - curr > Tineout) {
break;
}
if (readN(&ch, 1) == 1) {
if (ch == 0xF4) {
buf[0] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0xF3) {
buf[1] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0xF2) {
buf[2] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0xF1) {
buf[3] = ch;
if (readN(&buf[4], 19) == 19) {
// printdf(buf, 23); //打印原始数据
uint16_t Adistance = buf[10] << 8 | buf[9];
uint16_t Sdistance = buf[13] << 8 | buf[12];
uint16_t Distance = buf[16] << 8 | buf[15];
switch (buf[8]) {
case 0x00 : Serial.println("检测状态:无人"); break;
case 0x01 : Serial.println("检测状态:运动"); break;
case 0x02 : Serial.println("检测状态:静止"); break;
case 0x03 : Serial.println("检测状态:运动&静止目标"); break;
}
// Serial.print("运动目标能量值:");
// Serial.println(buf[11]);
// Serial.print("静止目标能量值:");
// Serial.println(buf[14]);
// Serial.print("运动目标距离CM:");
// Serial.println(Adistance);
// Serial.print("静止目标距离CM:");
// Serial.println(Sdistance);
Serial.print("探测距离CM:");
Serial.println(Distance);
break;
}
}
}
}
}
}
}
}
}
}
return ret;
}
void printdf(uint8_t *buf, int len)
{
for (int i = 0; i < len; i++) {
if (buf[i] < 0x10) {
Serial.print("0");
}
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
运行效果
模块只输出运动状态的目标距离值,非运动状态,距离值输出为0;如有疑问,请参考串口通信协议说明

串口通信协议说明
LD2410 串口通信协议 V1.08.pdf//含上位机使用和配置说明&串口通信协议指令
24GHz_Tool_CN.rar//上位机
应用场景
这款模组对运动、微动和站立、坐卧的人体均可进行探测识别,支持多级调参,可广泛应用于 AIoT 各种场景,常用类型如下
- 人体感应灯控:
感知所在空间是否有人存在,自动控制灯光,如公共场所照明设备、各类感应灯、球泡灯等。 - 广告屏等设备的人体感应唤醒:
人来自动开启,无人自动休眠节电,信息投放更精准高效 - 生命安全防护:
UV灯工作保护,防止UV灯在周边有人时开启对人身造成伤害
危险场所自动检测告警,防止有人进入特定高危空间,如煤矿爆破的进制人员进入的高危场所 - 智能家电:
房间内长时间无人,电视空调等电器自动关闭,节能又安全 - 智能安防:
对指定范围内有人侵入、逗留等的检测识别

安装方式和感应范围
挂顶安装示意图
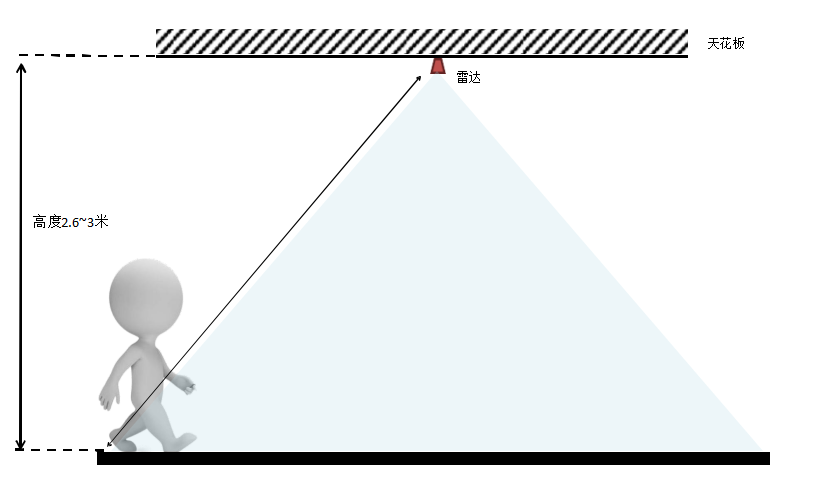
探测范围示意图(挂顶高度3米)
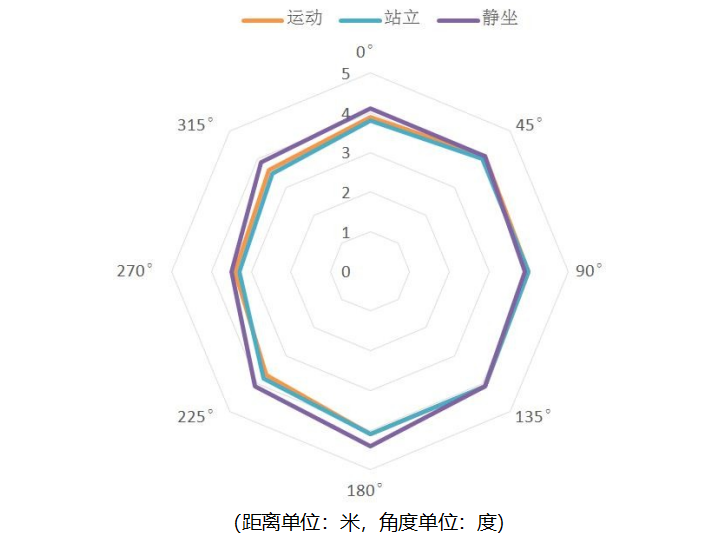
挂壁安装示意图
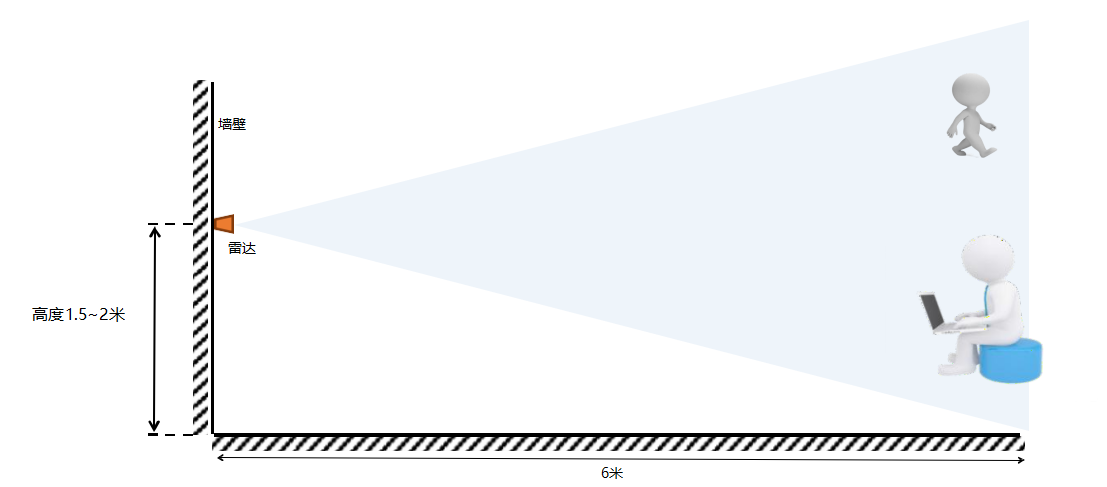
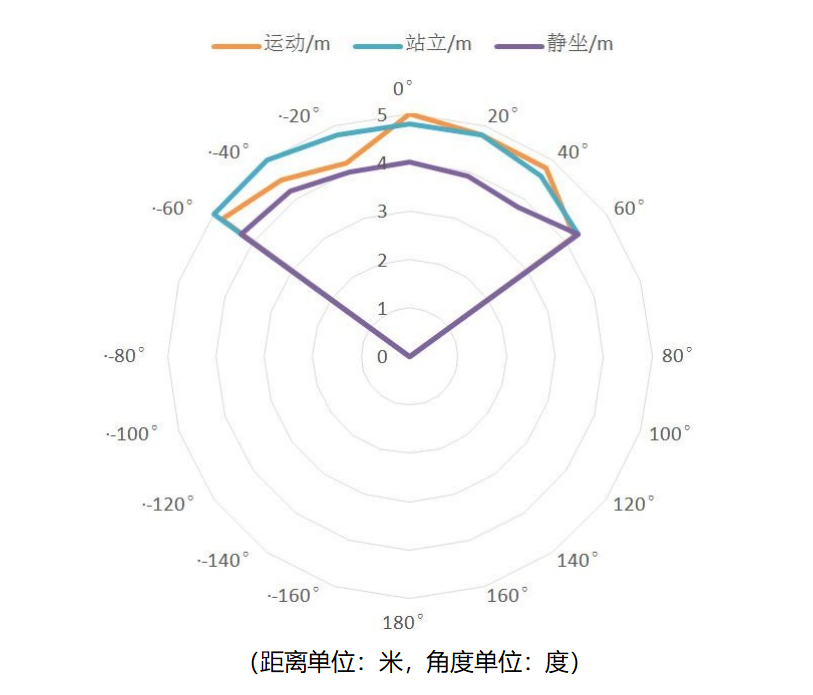
探测范围示意图(挂壁高度1.5米)

安装条件
确认最小安装间隙
如果雷达需要安装外壳,则外壳必须在24GHz有良好的透波特性,不能含有金属材质或对电磁波有屏蔽作用的材料。
安装环境要求
本产品需要安装在合适的环境中,如在以下环境中使用,检测效果将受到影响:
- 感应区域内存在持续运动的非人物体,如动物,持续摆动的窗帘、正对出风口的大株绿植等
- 感应区域内存在大面积的强反射物,强反射物正对雷达天线会造成干扰
- 挂壁安装时,需要考虑室内顶部的空调,电风扇等外部的干扰因素
安装时注意事项
- 尽量保证雷达天线正对要检测的区域,且天线四周开阔无遮挡
- 要保证传感器的安装位置牢固、稳定,雷达本身的晃动将影响检测效果
- 要保证雷达的背面不会有物体运动或震动。由于雷达波具有穿透性,天线信号背瓣可能会检测到雷达背面的运动物体。可以采用金属屏蔽罩或者金属背板,对雷达背瓣进行屏蔽,减弱雷达背面 物体造成的影响
- 雷达理论距离精度是在距离分辨率(0.2m或0.75m)的基础上通过特殊算法处理得到的结果,由于目标的体型,状态,RCS等不同,目标距离精度会有波动;同时最远距离也会稍有波动
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖
更新记录
| 版本 | 更新说明 |
|---|---|
| V1.1 | 默认波特率更新为57600 ,涉及相关资料已更新 |