简介
Gravity: ICP-10111气压温度传感器搭载了TDK新推出ICP-10111气压温度传感器,基于MEMS电容技术,以实现了超低功耗,实现了业界领先的相对精度和温度偏移系数。
ICP-10111气压温度传感器可以以±1Pa的精度测量压差,高度测量差值可小至8.5cm,小于单个台阶的高度。压力噪声可低至0.4Pa,读出的数据更加稳定。内置温度传感器进行气压补偿,温度偏移系数低至0.5Pa/℃,长期稳定性更高。该传感器高测量精度、低噪声、低功耗、低温度漂移等特性非常适合无人机高度控制、室内导航定位、垂直速度测量、增强现实和虚拟显示应用。
产品特性
- 相对精度±1Pa,高度测量差小至8.5cm
- 温度系数漂移低±0.5Pa/℃,长期稳定性高
- 压力噪声可低至0.4Pa,数据更稳定
应用领域
- 无人机高度控制
- 室内导航定位
- 垂直速度测量
- 增强现实和虚拟显示应用
技术规格
- 工作电压:3.3V~5.5V
- 工作电流:<2mA
- 通讯方式:I2C
- I2C地址:0x63
- 大气压测量范围:30~110 kPa
- 相对气压测量精度:±0.01 hPa(950hPa~1050hPa,25℃)
- 绝对气压测量精度:±1 hPa(950hPa-1050hPa,0℃~65℃)
- 温度漂移系数:±0.5 Pa/℃(100kPa,25℃~45℃)
- 绝对温度测量精度:±0.4℃
- 工作温度:-40℃~85℃
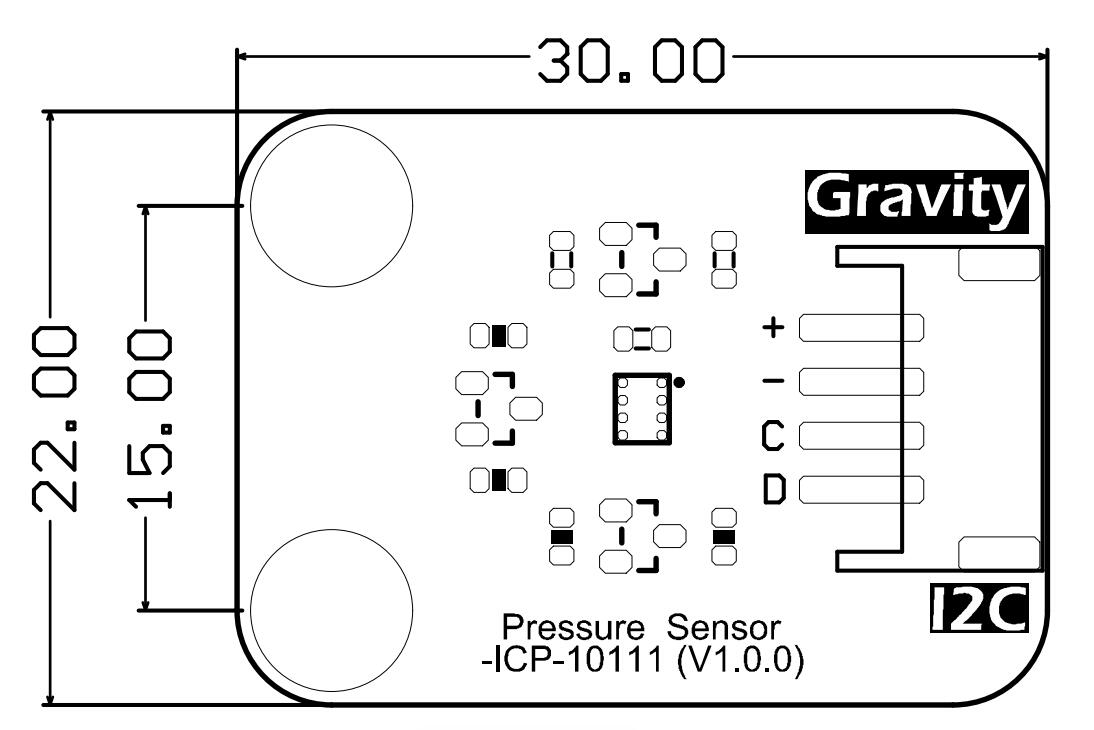
- 外形尺寸:30 mm * 22 mm
- 安装孔:孔间距:15 mm,孔径:3 mm
引脚说明

| 丝印 | 功能描述 |
|---|---|
| + | 电源正极 |
| - | 电源负极 |
| C | I2C时钟引脚 |
| D | I2C数据引脚 |
使用教程
- 测出当前环境下的大气压强、温度值和海拔高度
准备
- 硬件
- DFRduino UNO控制板x1
- Gravity 气压传感器x1
- 若干 杜邦线
- 软件
- Arduino IDE 点击下载Arduino IDE
- 下载并安装DFRobot_ICP库。如何安装库?
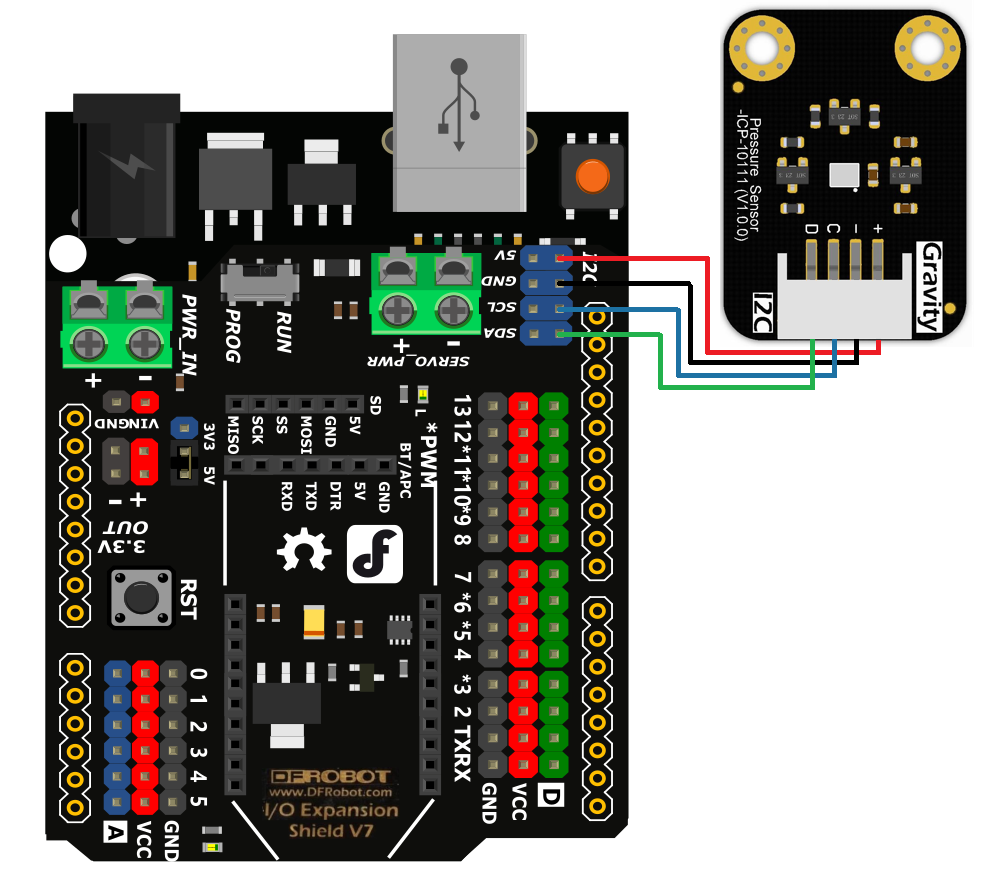
接线图
连接模块与DFRduino UNO主板(通过I2C接口),按照如下图的方式连接。
样例代码1
- 拷贝以下的代码到Arduino IDE然后烧录到DFRduino Uno上
注:海拔高度是通过气压计算得出,因为气压会受到天气、季节、气流等因素影响,因此数据会出现偏差。
/*!
* @file readData.ino
* @brief 这是传感器SEN0516的例程,通过运行本例程,获取传感器的温度、气压及海拔。
* @copyright Copyright (c) 2021 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author [TangJie](jie.tang@dfrobot.com)
* @version V1.0
* @date 2021-11-05
* @url https://github.com/DFRobot/DFRobot_ICP
*/
#include <DFRobot_ICP10111.h>
DFRobot_ICP10111 icp;
void setup(void)
{
Serial.begin(115200);
while(icp.begin() != 0){
Serial.println("Failed to initialize the sensor");
}
Serial.println("Success to initialize the sensor");
/**
* @brief 设置工作模式
* |------------------|-----------|-------------------|----------------------|
* | api | mode |Conversion Time(ms)|Pressure RMS Noise(Pa)|
* |icp.eLowPower | 低功耗 | 1.8 | 3.2 |
* |icp.eNormal | 正常模式 | 6.3 | 1.6 |
* |icp.eLowNoise | 低噪声 | 23.8 | 0.8 |
* |icp.eUltraLowNoise| 超低噪声 | 94.5 | 0.4 |
*/
icp.setWorkPattern(icp.eUltraLowNoise);
}
void loop(void)
{
Serial.println("------------------------------");
Serial.print("Read air pressure:");
Serial.print(icp.getAirPressure());
Serial.println("Pa");
Serial.print("Read temperature:");
Serial.print(icp.getTemperature());
Serial.println("℃");
Serial.print("Read altitude:");
Serial.print(icp.getElevation());
Serial.println("m");
delay(1000);
}
结果
- 打开串口监视器你将看到当前环境的气压、温度、海拔
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
