简介
这款测距模组是一个基于单点TOF技术,采用850nm LED光源,配合独特的光学、结构、电路设计而成的低成本测距模组,实现中短距离的测距需求,测距范围为 0.2m~12m,结合相应的滤波算法处理,可以得到极低的测量噪声。
该款测距模组同时支持 I2C 和 UART 的通信,便于终端产品的集成。在测距方面提供单次被动测量和连续主动测量,以满足不同终端产品的实际使用需求。
技术规格
- 测量范围:0.2m~12m(室内90%反射率)
- 供电电压:4.8-5.2V
- 通信方式:UART、I2C
- 测量精度:20-350cm (±5cm) 351-1200cm(±1.5%cm)
- 接收视野角:半角1°
- 发送视野角:半角2°
- 最小分辨率:1mm
- 测试帧率:Max 500Hz
- 抗环境光能力:15KIux
- 曝光时间:5us-5000us
- 信号幅度:3400LSB-7000LSB
- 工作温度 -10℃-60℃
注:除了能在各主板上使用外,模组还可以直接在上位机使用,上位机软件与使用教程在最下方的PDF资料文件中。
引脚示意图
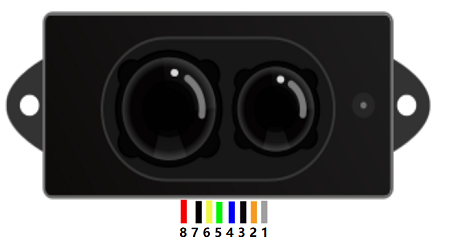
| 标号 | 名称 | 功能描述 |
|---|---|---|
| 1 | SCL | I2C 通讯时钟线 |
| 2 | SDA | I2C 通讯数据线 |
| 3 | GND_LED | 光源供电地 |
| 4 | VCC_LED | 光源供电电源(5V) |
| 5 | TX | UART 发送数据线 |
| 6 | RX | UART 接收数据线 |
| 7 | GND | 模块主供电地 |
| 8 | VCC | 模块主供电电源(5V) |
使用教程
准备
- 硬件
Arduino UNO x1
TOF红外测距模块 x1
- 软件
Arduino IDE,点击下载 Arduino IDE
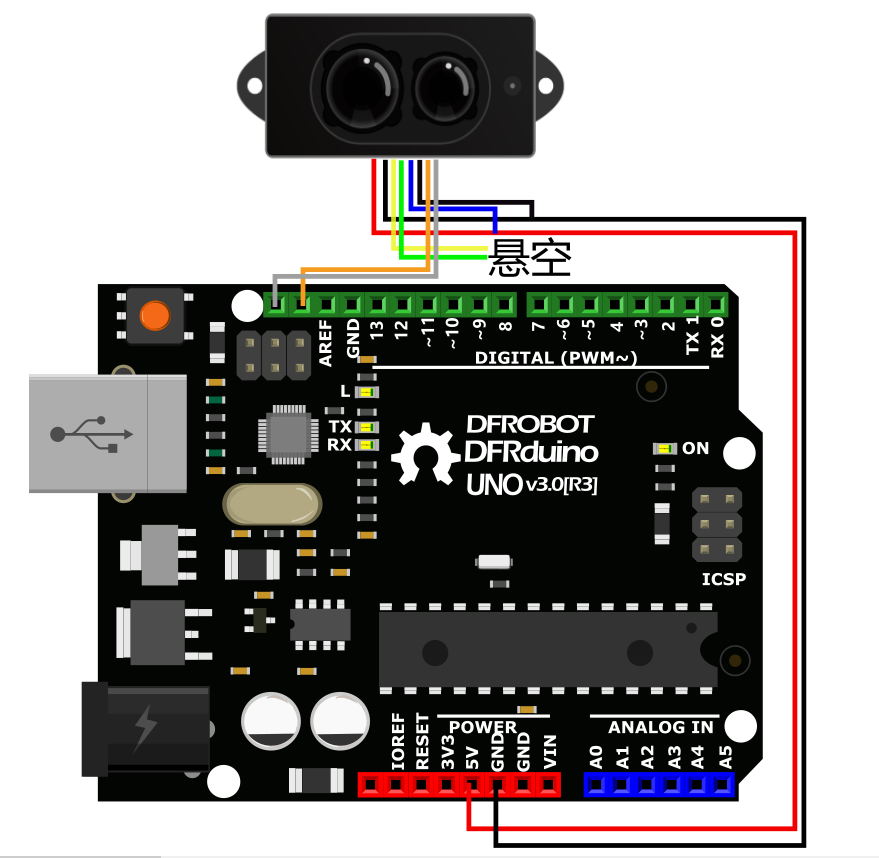
Arduino I2C接线图
示例代码
/**
* @file measureDistance.ino
* @brief This example demonstrated the basic distance measuring function of LIDAR07, the range is 0.2m-12m (Operating voltage: 5 V)
* @n Connection rules: PIN1-PIN8 are in the front of the sensor from right to left.
* @n PIN1----------------------SCL--------------------Maincontroller SCL(IIC mode)
* @n PIN2----------------------SDA--------------------Maincontroller SDA(IIC mode)
* @n PIN3----------------------Light source power supply ground--------------Maincontroller GND
* @n PIN4----------------------Light source power supply(5V)--------Maincontroller VCC
* @n PIN5----------------------TX---------------------Maincontroller RX pin, which is set to be used for serial communication with the sensor (UART mode)
* @n PIN6----------------------RX---------------------Maincontroller TX pin, which is set to be used for serial communication with the sensor (UART mode)
* @n PIN7----------------------Module main power supply ground------------Maincontroller GND
* @n PIN8----------------------Module main power supply(5V)------Maincontroller VCC
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [yangfeng]<feng.yang@dfrobot.com>
* @version V1.0
* @date 2022-06-20
* @url https://github.com/DFRobot/DFRobot_LIDAR07
*/
#include"DFRobot_LIDAR07.h"
//If using IIC mode, please enable macro USE_IIC
#define USE_IIC
#ifdef USE_IIC
DFRobot_LIDAR07_IIC LIDAR07;
#endif
//If using UART mode, please enable macro USE_UART. The USE_UART is enabled by default. The two modes USE_IIC and USE_UART can’t be used at the same time.
//#define USE_UART
#ifdef USE_UART
#if defined(ESP8266)||defined(ARDUINO_AVR_UNO)
#include <SoftwareSerial.h>
SoftwareSerial mySerial(4,12);//GPIO4 is corresponding to RX on main control board, GPIO12 is corresponding to TX on main control board
/**!
* The TX of esp32 Serial1 is GPIO10, and the RX is GPIO9
* The TX of mega2560 Serial1 is GPIO18, and the RX is GPIO19
* The TX of M0 Serial1 is GPIO1, and the RX is GPIO0
* The TX of leonardo Serial1 is GPIO1, and the RX is GPIO0
*/
#endif
DFRobot_LIDAR07_UART LIDAR07;
#endif
void setup() {
uint32_t version;
Serial.begin(115200);
#ifdef USE_IIC
while(!LIDAR07.begin()){
Serial.println("The sensor returned data validation error");
delay(1000);
}
#endif
#ifdef USE_UART
#if defined(ESP8266)||defined(ARDUINO_AVR_UNO)
mySerial.begin(115200);
while(!LIDAR07.begin(mySerial)){
Serial.println("The sensor returned data validation error");
delay(1000);
}
#else
Serial1.begin(115200);
while(!LIDAR07.begin(Serial1)){
Serial.println("The sensor returned data validation error");
delay(1000);
}
#endif
#endif
version = LIDAR07.getVersion();
Serial.print("VERSION: ");
Serial.print((version>>24)&0xFF,HEX);
Serial.print(".");Serial.print((version>>16)&0xFF,HEX);
Serial.print(".");Serial.print((version>>8)&0xFF,HEX);
Serial.print(".");Serial.println((version)&0xFF,HEX);
//After enabling the filter, it can be stopped by calling LIDAR07.stopFilter()
LIDAR07.startFilter();
/**
* @brief Configure the sensor to single acquisition mode
* @param mode The way data are collected
* @n eLidar07Single A single collection
* @n eLidar07Continuous Continuous acquisition
* @return true (Successful) , false (Failed)
*/
while(!LIDAR07.setMeasureMode(LIDAR07.eLidar07Single)){
Serial.println("set measure mode err");
}
}
void loop() {
//Open measurement (in single measurement mode, it will automatically close after sampling),To stop collection, use stopMeasure()
LIDAR07.startMeasure();
//Get the collected data
if(LIDAR07.getValue()){
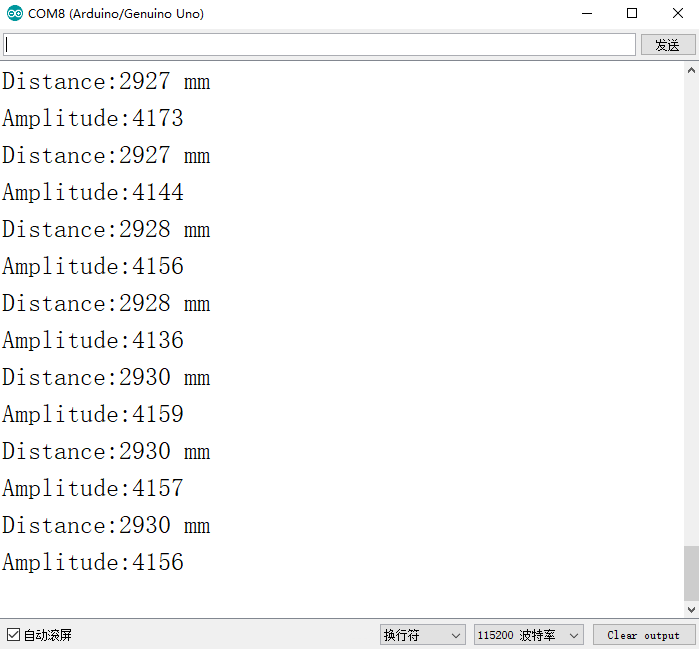
Serial.print("Distance:");Serial.print(LIDAR07.getDistanceMM());Serial.println(" mm");
Serial.print("Amplitude:");Serial.println(LIDAR07.getSignalAmplitude());
}
delay(1000);
}
示例结果
各类主板兼容性

常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖