产品简介
LIS2DW12三轴加速度计是一款超低功耗的线性加速度计,该传感器拥有两个独立的可编程中断及专用内部引擎,可实现超多功能,例如自由落体检测、纵向/横向检测、朝向检测、可配置的单击/双击识别、运动检测、运动唤醒以实现高级省电等。我们为您提供了以上功能的示例程序,方便您在项目中轻松使用。
该传感器具有±2g /±4g /±8g /±16g的用户可选全刻度,并能够以1.6 Hz至1600 Hz的输出数据速率测量加速度。它内置多种带宽的多种运行模式,您可以按需选择合适的模式。
注意:Gravity版本没有引出两个可编程中断引脚,若需要使用外部中断的高级功能,请购买Breakout版本
特性
- 可选量程:±2g /±4g /±8g /±16g
- 16位数据输出
- 简单易用的Gravity接口,无需焊接
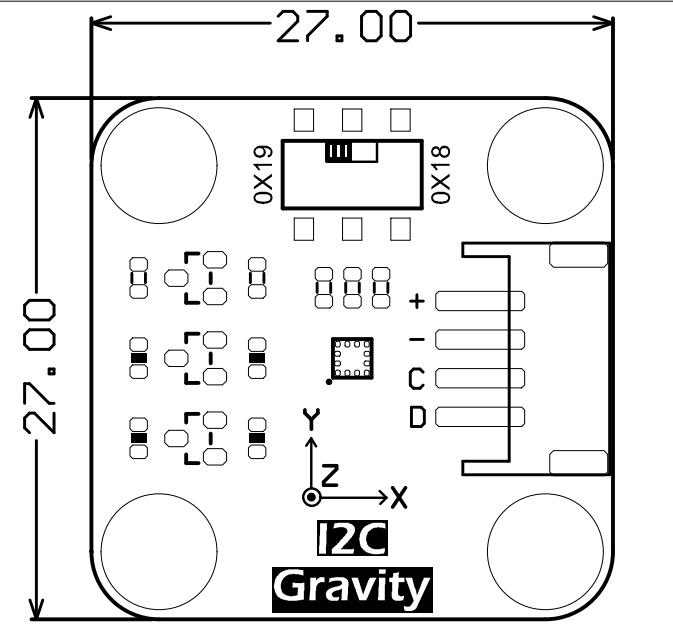
- 拨扭开关可方便切换I2C地址
技术规格
- 工作电压:3.3V~5V
- 工作电流:8~10uA(低功耗低噪声模式)/0.12mA(高性能模式)
- 接口方式:Gravity-I2C接口
- I2C地址:0x19(默认地址)/0x18(可选)
- 可选标尺:±2g /±4g /±8g /±16g
- 频率:1.6Hz~1600Hz
- 16位数据输出
- 睡眠唤醒功能
- 超低噪声:1.3 mg RMS(低功耗模式)
- 32级FIFO(先进先出缓冲区)
- 万克高抗撞击能力
- ECOPACK®RoHS和“绿色”标准
- 工作温度:-40℃~+85℃
- 模块尺寸:27 x 27(mm)
- 安装孔尺寸:内径3.1mm/外径6mm
应用
- 自由落体检测
- 运动检测及记录
- 单击/双击检测
- 自平衡机器人
- 飞行器
- 人体动作识别
- 空气鼠标
- 游戏手柄
- 冲击检测及记录
引脚说明
| 序号 | 丝印 | 功能描述 |
|---|---|---|
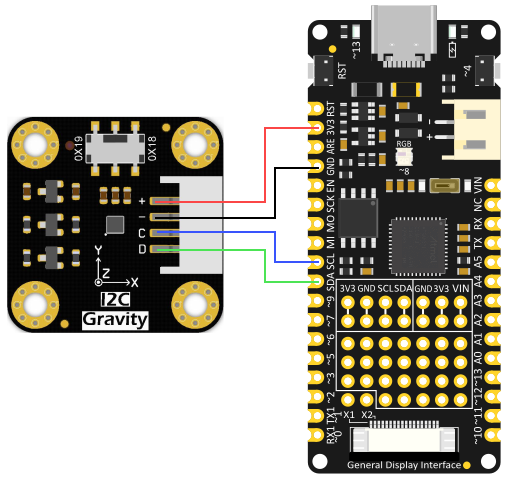
| 1 | VCC/+ | 5V / 3V3 |
| 2 | GND/- | GND |
| 3 | SCL/C | I2C时钟线 |
| 4 | SDA/D | I2C数据线 |
注意:拨钮开关可选择I2C地址为0x18或0x19。micro:bit(v1.5版本)的I2C地址与传感器I2C地址0x19冲突,所以请选择0x18。
M0使用教程
请按接线图所示将传感器与M0(或其它主板)相连接即可。
准备
- 硬件
- 1 x Firebeetle Board-M0
- 1 x LIS2DW12三轴加速度计
- 若干 杜邦线
- 软件
- Arduino IDE, 点击下载Arduino IDE
- LIS系列库文件和示例程序
关于如何安装库文件,点击链接
-
样例代码
-
主要API接口函数列表
DFRobot_LIS2DW12();
/**
* @brief Initialize the function
* @return true(Initialization succeed)/fasle(Initialization failed)
*/
bool begin(void);
/**
* @brief Get chip id
* @return 8 bit serial number
*/
uint8_t getID();
/**
* @brief Software reset to restore the value of all registers to the default value
*/
void softReset();
/**
* @brief Enable the chip to continuously collect data
* @param enable true(continuous update)/false( output registers not updated until MSB and LSB read)
*/
void continRefresh(bool enable);
/**
* @brief Set the filter processing mode
* @param path path of filtering
eLPF = 0x00,/< low-pass filter path selected>/
eHPF = 0x10,/<high-pass filter path selected>/
*/
void setFilterPath(ePath_t path);
/**
* @brief Set the bandwidth of the data
* @param bw bandwidth
eRateDiv_2 ,/<Rate/2 (up to Rate = 800 Hz, 400 Hz when Rate = 1600 Hz)>/
eRateDiv_4 ,/<Rate/4 (High Power/Low power)>*
eRateDiv_10 ,/<Rate/10 (HP/LP)>/
eRateDiv_20 ,/<Rate/20 (HP/LP)>/
*/
void setFilterBandwidth(eBWFilter_t bw);
/**
* @brief Set power mode, there are two modes for the sensor to measure acceleration
* @n 1.Continuous measurement In this mode, the sensor will continuously measure and store data in its register
* @n 2.Single data conversion on demand mode In this mode, the sensor will not make a measurement unless it receives an external request
* @param mode power modes to choose from
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
void setPowerMode(ePowerMode_t mode);
/**
* @brief Chip data collection rate setting
* @param rate Accelerometer frequency, 0-1600hz selection
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, use only under low-power mode>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement>/
*/
void setDataRate(eRate_t rate);
/**
* @brief Set the free fall time, or the number of free-fall samples. In a measurement, it will not be determined as a free fall event unless the samples are enough.
* @param dur Freefall samples, range:0~31
* @n time = dur * (1/rate)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
void setFreeFallDur(uint8_t dur);
/**
* @brief Select the interrupt event generated on the int1 pin
* @param event Interrupt event, when it occurs, a level jump will be generated on the int1 pin
eDoubleTap = 0x08,/<Double tap event>/
eFreeFall = 0x10,/<Free-fall event>/
eWakeUp = 0x20,/<Wake-up event>/
eSingleTap = 0x40,/<Single tap event>/
e6D = 0x80,/<An event that changes the status of facing up/down/left/right/forward/back>/
*/
void setInt1Event(eInt1Event_t event);
/**
* @brief Select the interrupt event generated on the int2 pin
* @param event Interrupt event, when it occurs, a level jump will be generated on the int2 pin
eSleepChange = 0x40,/<Sleep change status routed to INT2 pad>/
eSleepState = 0x80,/<Enable routing of SLEEP_STATE on INT2 pad>/
*/
void setInt2Event(eInt2Event_t event);
/**
* @brief Set wake-up duration, when using the detection mode of eDetectAct in setActMode() function, it will collect data at a normal rate
* @n after the chip is awakened. Then after a period of time, the chip will continue to hibernate, collecting data at a frequency of 12.5hz.
* @param dur duration,range: 0~3
@n time = dur * (1/rate)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
void setWakeUpDur(uint8_t dur);
/**
* @brief Set the wake-up threshold, when the acceleration in a certain direction is greater than this value, a wake-up event will be triggered
* @param th threshold ,unit:mg, the value is within the measurement range
*/
void setWakeUpThreshold(float th);
/**
* @brief Set the mode of motion detection, the first mode will not detect whether the module is moving; the second, once set, will measure data at a lower
* @n frequency to save consumption, and return to normal after detecting motion; the third can only detect whether the module is in sleep state.
* @param mode Motion detection mode
eNoDetection /<No detection>/
eDetectAct /<Detect movement,the chip automatically goes to 12.5 Hz rate in the low-power mode>/
eDetectStatMotion /<Detect Motion, the chip detects acceleration below a fixed threshold but does not change either rate or operating mode>/
*/
void setActMode(eActDetect_t mode);
/**
* @brief Set the range
* @param range 量程
e2_g = 2, /<±2g>/
e4_g = 4, /<±4g>/
e8_g = 8, /<±8g>/
e16_g = 16, /< ±16g>/
*/
void setRange(eRange_t range);
/**
* @brief Enable detect tap events in the Z direction
* @param enable ture(Enable tap detection)\false(Disable tap detection)
*/
void enableTapDetectionOnZ(bool enable);
/**
* @brief Enable detect tap events in the Y direction
* @param enable ture(Enable tap detection)\false(Disable tap detection)
*/
void enableTapDetectionOnY(bool enable);
/**
* @brief Enable detect tap events in the X direction
* @param enable ture(Enable tap detection)\false(Disable tap detection)
*/
void enableTapDetectionOnX(bool enable);
/**
* @brief Set the tap threshold in the X direction
* @param th Threshold(mg),Can only be used in the range of 0~2g
*/
void setTapThresholdOnX(float th);
/**
* @brief Set the tap threshold in the Y direction
* @param th Threshold(mg),Can only be used in the range of 0~2g
*/
void setTapThresholdOnY(float th);
/**
* @brief Set the tap threshold in the Z direction
* @param th Threshold(mg),Can only be used in the range of 0~2g
*/
void setTapThresholdOnZ(float th);
/**
* @brief Duration of maximum time gap for double-tap recognition. When double-tap
* @n recognition is enabled, this register expresses the maximum time between two
* @n successive detected taps to determine a double-tap event.
* @param dur duration, range:0~15
* @n time = dur * (1/rate)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
void setTapDur(uint8_t dur);
/**
* @brief Set the tap detection mode, detect single tap or both single tap and double tap
* @param mode Tap detection mode
eOnlySingle /<Detect single tap>/
eBothSingleDouble /<Detect both single tap and double tap>/
*/
void setTapMode(eTapMode_t mode);
/**
* @brief Set Thresholds for 4D/6D, when the threshold of rotation exceeds the specified angle, a direction change event will occur.
* @param degree eDegrees80 /<80°>/
eDegrees70 /<70°>/
eDegrees60 /<60°>/
eDegrees50 /<50°>/
*/
void set6DThreshold(e6DTh_t degree);
/**
* @brief Read the acceleration in the x direction
* @return Acceleration data from x(mg), the measurement range is ±2g, ±4g, ±8g or ±16g, set by the setRange() funciton.
*/
int16_t readAccX();
/**
* @brief Read the acceleration in the y direction
* @return Acceleration data from y(mg), the measurement range is ±2g, ±4g, ±8g or ±16g, set by the setRange() funciton.
*/
int16_t readAccY();
/**
* @brief Read the acceleration in the z direction
* @return Acceleration data from z(mg), the measurement range is ±2g, ±4g, ±8g or ±16g, set by the setRange() funciton.
*/
int16_t readAccZ();
/**
* @brief Detect motion
* @return true(Motion generated)/false(No motion)
*/
bool actDetected();
/**
* @brief Detect free fall
* @return true(Free-fall detected)/false(No free-fall)
*/
bool freeFallDetected();
/**
* @brief Detect whether the direction of the chip changes when the chip is facing up/down/left/right/forward/back (ie 6D)
* @return true(a change in position detected)/false(no event detected)
*/
bool oriChangeDetected();
/**
* @brief Only in 6D (facing up/down/left/right/forward/backward) state can the function get the orientation of the sensor relative to the positive z-axis.
* @return eXDown /<X is now down>/
eXUp /<X is now up>/
eYDown /<Y is now down>/
eYUp /<Y is now up>/
eZDown /<Z is now down>/
eZUp /<Z is now up>/
*/
eOrient_t getOrientation();
/**
* @brief Tap detection, can detect it is double tap or single tap
* @return eSTap /<Single Tap>/
eDTap /<double Tap>/
eNoTap, //No tap
*/
eTap_t tapDetect();
/**
* @brief Tap direction source detection
* @return eDirXUp /<Tap is detected in the positive direction of X>/
eDirXDown /<Tap is detected in the negative direction of X>/
eDirYUp /<Tap is detected in the positive direction of Y>/
eDirYDown /<Tap is detected in the negative direction of Y>/
eDirZUp /<Tap is detected in the positive direction of Z>/
eDirZDown /<Tap is detected in the negative direction of Z>/
*/
eTapDir_t getTapDirection();
/**
* @brief Wake-up motion direction detection
* @return eDirX /<The chip is woken up by the motion in X direction>/
eDirY /<The chip is woken up by the motion in Y direction>/
eDirZ /<The chip is woken up by the motion in Z direction>/
eDirError,/<Error detected>/
*/
eWakeUpDir_t getWakeUpDir();
/**
* @brief In Single data conversion on demand mode, request a measurement.
*/
void demandData();
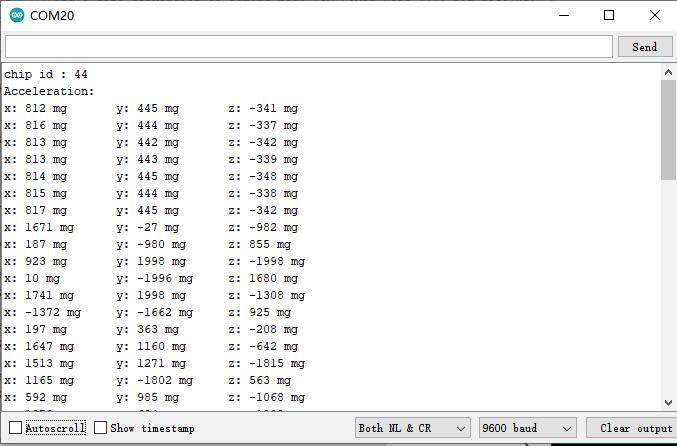
样例代码1-读取x,y,z轴加速度(getAcceleration.ino)
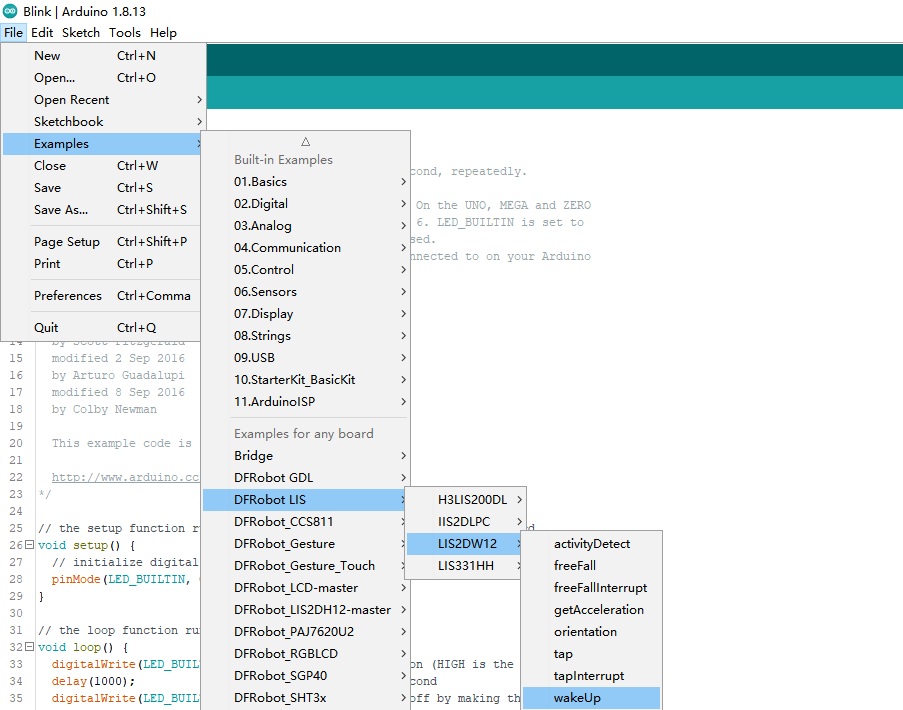
- 选择getAcceleration.ino
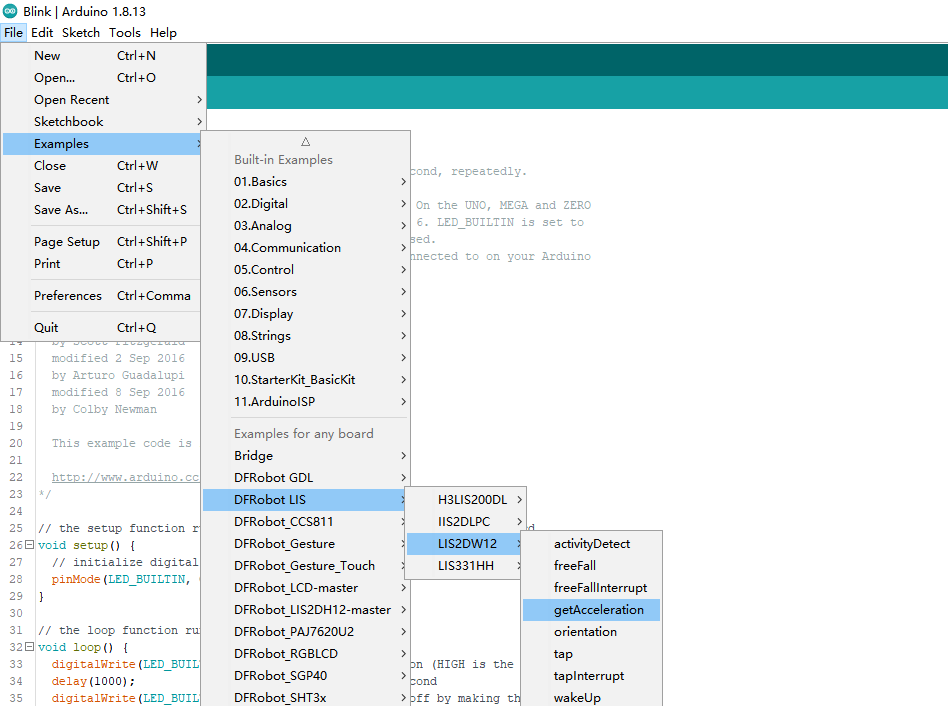
- 烧录程序
/**!
* @file getAcceleration.ino
* @brief Get the acceleration in the three directions of xyz, the range can be ±2g, ±4g, ±8g or ±16g, set by the setRange() function
* @n In this example, the continuous measurement mode is selected by default -- the acceleration data will be measured continuously according to the measuring rate.
* @n You can also use the single data conversion on demand mode 1. You need to select a suitable conversion mode in the setPowerMode() function
* @n 2. Fill in the setDataRate() function with the eSetSwTrig parameter
* @n 3. Request a measurement by the demandData() function
* @n When using SPI, chip select pin can be modified by changing the value of LIS2DW12_CS
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli](li.feng@dfrobot.com)
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS2DW12.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS2DW12_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS2DW12_I2C acce(&Wire,0x18);
DFRobot_LIS2DW12_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS2DW12_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS2DW12_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS2DW12_CS 3
#elif (defined NRF5)
#define LIS2DW12_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
//Chip soft reset
acce.softReset();
//Set whether to collect data continuously
acce.continRefresh(true);
/**!
Set the sensor data collection rate:
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, use only under low-power mode>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement>/
*/
acce.setDataRate(DFRobot_LIS2DW12::eRate_50hz);
/**!
Set the sensor measurement range:
e2_g /<±2g>/
e4_g /<±4g>/
e8_g /<±8g>/
e16_g /< ±16g>/
*/
acce.setRange(DFRobot_LIS2DW12::e2_g);
/**!
Filter settings:
eLPF (Low pass filter)
eHPF (High pass filter)
*/
acce.setFilterPath(DFRobot_LIS2DW12::eLPF);
/**!
Set bandwidth:
eRateDiv_2 /<Rate/2 (up to Rate = 800 Hz, 400 Hz when Rate = 1600 Hz)>/
eRateDiv_4 /<Rate/4 (High Power/Low power)>*
eRateDiv_10 /<Rate/10 (HP/LP)>/
eRateDiv_20 /< Rate/20 (HP/LP)>/
*/
acce.setFilterBandwidth(DFRobot_LIS2DW12::eRateDiv_4);
/**!
Set power mode:
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwrLowNoise2_14bit);
Serial.print("Acceleration:\n");
delay(100);
}
void loop(void){
//Request a measurement under single data conversion on demand mode
//acce.demandData();
//The mearsurement range is ±2g,±4g,±8g or ±16g, set by the setRange() function.
Serial.print("x: ");
//Read the acceleration in the x direction
Serial.print(acce.readAccX());
Serial.print(" mg \ty: ");
//Read the acceleration in the y direction
Serial.print(acce.readAccY());
Serial.print(" mg \tz: ");
//Read the acceleration in the z direction
Serial.print(acce.readAccZ());
Serial.println(" mg");
delay(300);
}
结果
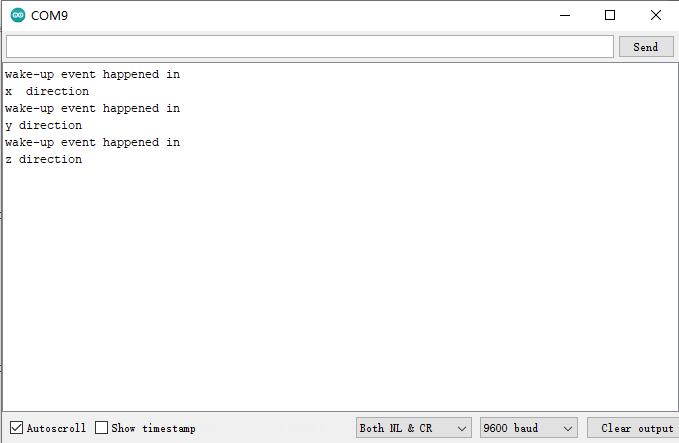
样例代码2-睡眠唤醒功能(wakeUp.ino)
- 选择wakeUp.ino
- 烧录程序
/**!
* @file wakeUp.ino
* @brief When the acceleration change in x, y or z direction is detected to exceed the threshold we set before, the chip will generate a wake-up event.
* @n By accessing the chip register, we can know which direction of movement wakes up the chip.
* @n In this example, it is necessary to set the wake-up duration by setWakeUpDur().
* @n When woken up, the chip will last for a while before it enters the sleep state.
* @n And to set the threshold by setWakeUpThreshold(). When the acceleration change exceeds this value, the eWakeUp event will be triggered.
* @n When using SPI, chip select pin can be modified by changing the value of LIS2DW12_CS
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli](li.feng@dfrobot.com)
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS2DW12.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS2DW12_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS2DW12_I2C acce(&Wire,0x18);
DFRobot_LIS2DW12_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS2DW12_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS2DW12_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS2DW12_CS 3
#elif (defined NRF5)
#define LIS2DW12_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
//Chip soft reset
acce.softReset();
/**!
Set the sensor measurement range:
e2_g /<±2g>/
e4_g /<±4g>/
e8_g /<±8g>/
e16_g /< ±16g>/
*/
acce.setRange(DFRobot_LIS2DW12::e2_g);
/**!
Set power mode:
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwrLowNoise1_12bit);
/**!
Set the sensor data collection rate:
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, use only under low-power mode>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement>/
*/
acce.setDataRate(DFRobot_LIS2DW12::eRate_200hz);
/**!
Filter settings:
eLPF(Low pass filter)
eHPF(High pass filter)
*/
acce.setFilterPath(DFRobot_LIS2DW12::eLPF);
/**
The wake-up duration – when woken up, the chip will last for a while before it enters the sleep state.
dur (0 ~ 3)
time = dur * (1/Rate)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
acce.setWakeUpDur(/*dur =*/2);
//Set wakeup threshold, when the acceleration change exceeds this value, the eWakeUp event will be triggered, unit:mg
//The value is within the range
acce.setWakeUpThreshold(/*threshold = */0.5);
/**!
Set the interrupt event of the int1 pin:
eDoubleTap(Double click)
eFreeFall(Free fall)
eWakeUp(wake)
eSingleTap(single-Click)
e6D(Orientation change check)
*/
acce.setInt1Event(DFRobot_LIS2DW12::eWakeUp);
/**!
Set the interrupt event of the int1 pin:
eSleepChange = 0x40,/<Sleep change status routed to INT2 pad>/
eSleepState = 0x80,/<Enable routing of SLEEP_STATE on INT2 pad>/
*/
//acce.setInt2Event(DFRobot_LIS2DW12::eSleepChange);
delay(100);
}
void loop(void){
//Wake-up event detected
if(acce.actDetected()){
Serial.print("wake-up event happened in ");
//Wake-up motion direction detection
DFRobot_LIS2DW12::eWakeUpDir_t dir = acce.getWakeUpDir();
if(dir == DFRobot_LIS2DW12::eDirX){
Serial.println("x direction");
}
if(dir == DFRobot_LIS2DW12::eDirY){
Serial.println("y direction");
}
if(dir == DFRobot_LIS2DW12::eDirZ){
Serial.println("z direction");
}
delay(100);
}
}
结果
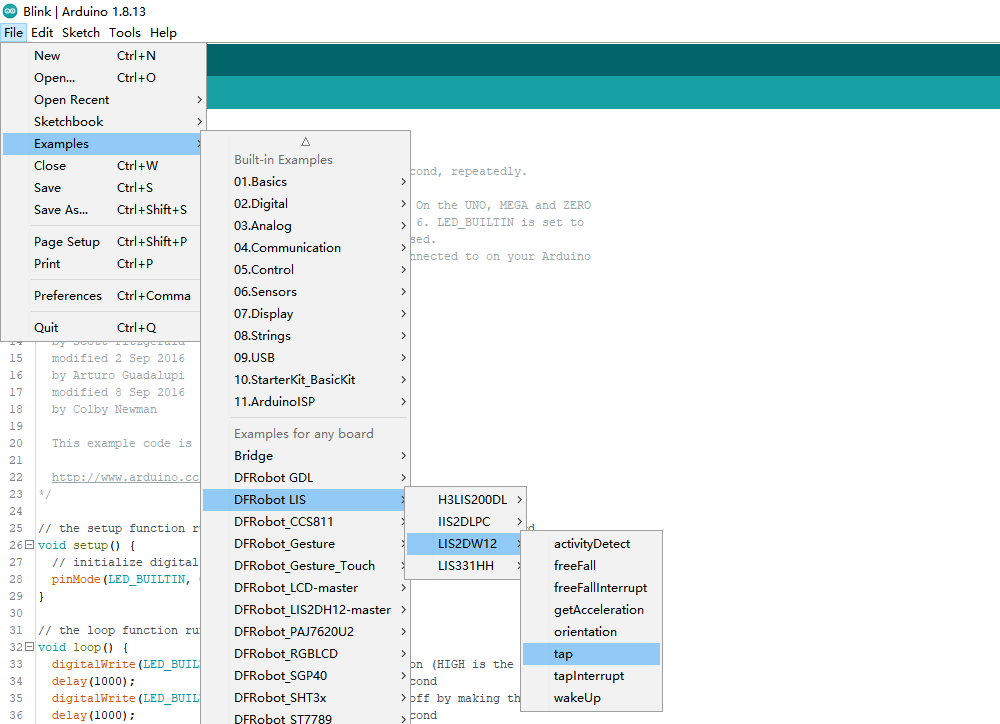
样例代码3-敲击检测功能(tap.ino)
- 选择tap.ino
- 烧录程序
/**!
* @file tap.ino
* @brief Single tap and double tap detection, tapping the module or the desktop near the module both can trigger the tap event
* @n You can select to detect single tap or to detect both single tap and double tap by the setTapMode() function
* @n When using SPI, chip select pin can be modified by changing the value of LIS2DW12_CS
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli](li.feng@dfrobot.com)
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS2DW12.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS2DW12_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS2DW12_I2C acce(&Wire,0x18);
DFRobot_LIS2DW12_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS2DW12_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS2DW12_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS2DW12_CS 3
#elif (defined NRF5)
#define LIS2DW12_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
//Chip soft reset
acce.softReset();
/**!
Set the sensor measurement range:
e2_g /<±2g>/
e4_g /<±4g>/
e8_g /<±8g>/
e16_g /< ±16g>/
*/
acce.setRange(DFRobot_LIS2DW12::e2_g);
/**!
Set power mode:
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwrLowNoise1_12bit);
/**!
Set the sensor data collection rate:
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, use only under low-power mode>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement>/
*/
acce.setDataRate(DFRobot_LIS2DW12::eRate_800hz);
//Enable tap detection in the Z direction
acce.enableTapDetectionOnZ(true);
//Enable tap detection in Y direction
acce.enableTapDetectionOnY(true);
//Enable tap detection in the X direction
acce.enableTapDetectionOnX(true);
//The threshold setting in the X direction
//Threshold(mg),Can only be used in the range of ±2g
acce.setTapThresholdOnX(/*Threshold = */0.5);
//The threshold setting in the Y direction //Threshold(mg),Can only be used in the range of ±2g
acce.setTapThresholdOnY(/*Threshold = */0.5);
//The threshold setting in the Z direction //Threshold(mg),Can only be used in the range of ±2g)
acce.setTapThresholdOnZ(/*Threshold = */0.5);
/*
Set the interval time between two taps when detecting double tap
dur duration(0 ~ 15)
time = dur * (1/ODR)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
acce.setTapDur(/*dur=*/6);
/**!
Set tap detection mode:
eOnlySingle(Single tap)
eBothSingleDouble(Single tap and double tap)
*/
acce.setTapMode(DFRobot_LIS2DW12::eBothSingleDouble);
/**!
Set the interrupt source of the int1 pin:
eDoubleTap(Double tap)
eFreeFall(Free fall)
eWakeUp(wake)
eSingleTap(single-tap)
e6D(Orientation change check)
*/
acce.setInt1Event(DFRobot_LIS2DW12::eDoubleTap);
delay(1000);
}
void loop(void){
//tap detected
DFRobot_LIS2DW12:: eTap_t tapEvent = acce.tapDetect();
//Tap source detection
DFRobot_LIS2DW12::eTapDir_t dir = acce.getTapDirection();
uint8_t tap = 0;
if(tapEvent == DFRobot_LIS2DW12::eSTap){
Serial.print("Single Tap Detected :");
tap = 1;
}
if(tapEvent == DFRobot_LIS2DW12::eDTap){
Serial.print("Double Tap Detected :");
tap = 1;
}
if(tap == 1){
if(dir == DFRobot_LIS2DW12::eDirXUp){
Serial.println("tap is detected in the positive direction of X");
}else if(dir == DFRobot_LIS2DW12::eDirXDown){
Serial.println("tap is detected in the negative direction of X");
}else if(dir == DFRobot_LIS2DW12::eDirYUp){
Serial.println("tap is detected in the positive direction of Y");
}else if(dir == DFRobot_LIS2DW12::eDirYDown){
Serial.println("tap is detected in the negative direction of Y");
}else if(dir == DFRobot_LIS2DW12::eDirZUp){
Serial.println("tap is detected in the positive direction of Z");
}else if(dir == DFRobot_LIS2DW12::eDirZDown){
Serial.println("tap is detected in the negative direction of Z");
}
delay(500);
tap = 0;
}
}
结果
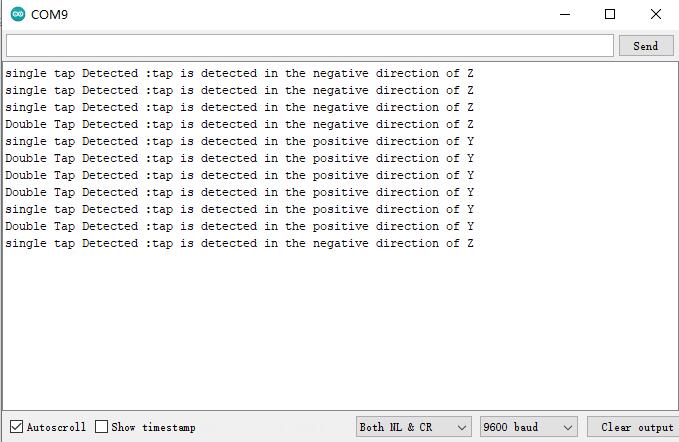
样例代码4-敲击中断功能(tapInterrupt.ino) (仅Breakout版本可使用)
- 选择tapInterrupt.ino
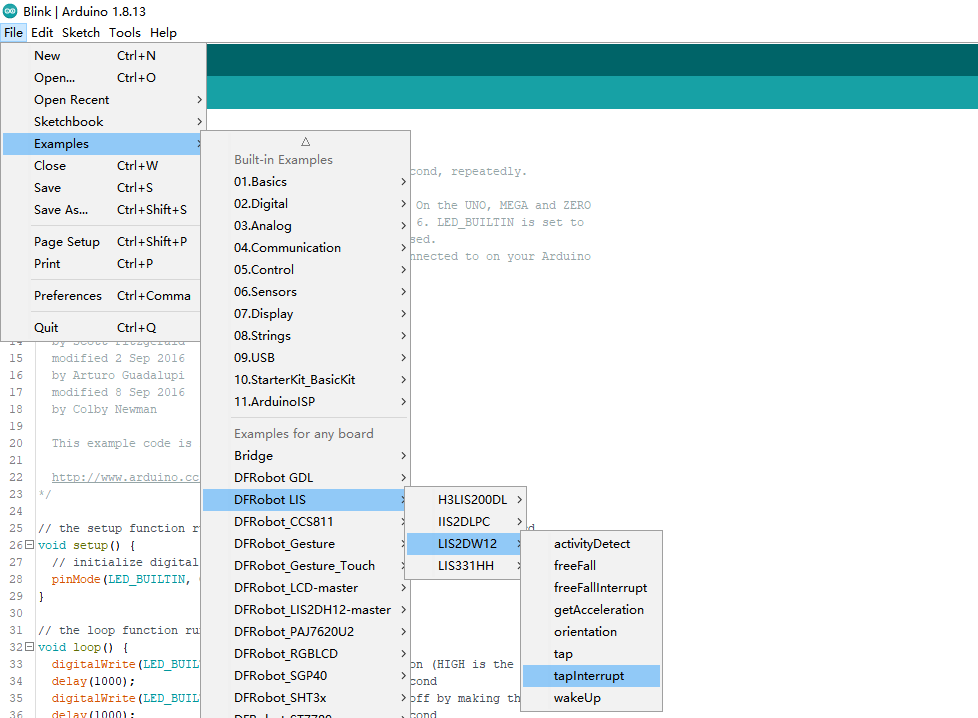
- 烧录程序
/**!
* @file tapInterrupt.ino
* @brief tap interrupt detection, tapping the module and the desktop near the module can both trigger the interrupt level on pin int1.
* @n When using SPI, chip select pin can be modified by changing the value of macro LIS2DW12_CS
* @n In this example, the int2/int1 pin on the module needs to be connected to the interrupt pin on the motherboard. Default UNO(2),
* @n Mega2560(2), Leonardo(3), microbit(P0),FireBeetle-ESP8266(D6),FireBeetle-ESP32((D6),FireBeetle-M0(6)
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli](li.feng@dfrobot.com)
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS2DW12.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS2DW12_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS2DW12_I2C acce(&Wire,0x18);
DFRobot_LIS2DW12_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS2DW12_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS2DW12_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS2DW12_CS 3
#elif (defined NRF5)
#define LIS2DW12_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
volatile uint8_t intFlag = 0;
void interEvent(){
intFlag = 1;
}
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
//Chip soft reset
acce.softReset();
#if defined(ESP32) || defined(ESP8266)
//The D6 pin is used as the interrupt pin by default, and other non-conflicting pins can also be selected as the external interrupt pin
attachInterrupt(digitalPinToInterrupt(D6)/*Query the interrupt number of the D6 pin*/,interEvent,CHANGE);
#elif defined(ARDUINO_SAM_ZERO)
//The 5 pin is used as the interrupt pin by default, and other non-conflicting pins can also be selected as the external interrupt pin
attachInterrupt(digitalPinToInterrupt(5)/*Query the interrupt number of the 5 pin*/,interEvent,CHANGE);
#else
/* The Correspondence Table of AVR Series Arduino Interrupt Pins And Terminal Numbers
* ---------------------------------------------------------------------------------------
* | | DigitalPin | 2 | 3 | |
* | Uno, Nano, Mini, other 328-based |--------------------------------------------|
* | | Interrupt No | 0 | 1 | |
* |-------------------------------------------------------------------------------------|
* | | Pin | 2 | 3 | 21 | 20 | 19 | 18 |
* | Mega2560 |--------------------------------------------|
* | | Interrupt No | 0 | 1 | 2 | 3 | 4 | 5 |
* |-------------------------------------------------------------------------------------|
* | | Pin | 3 | 2 | 0 | 1 | 7 | |
* | Leonardo, other 32u4-based |--------------------------------------------|
* | | Interrupt No | 0 | 1 | 2 | 3 | 4 | |
* |--------------------------------------------------------------------------------------
*/
/* The Correspondence Table of micro:bit Interrupt Pins And Terminal Numbers
* ---------------------------------------------------------------------------------------------------------------------------------------------
* | micro:bit | DigitalPin |P0-P20 can be used as an external interrupt |
* | (When using as an external interrupt, |---------------------------------------------------------------------------------------------|
* |no need to set it to input mode with pinMode)|Interrupt No|Interrupt number is a pin digital value, such as P0 interrupt number 0, P1 is 1 |
* |-------------------------------------------------------------------------------------------------------------------------------------------|
*/
attachInterrupt(/*Interrupt No*/0,interEvent,CHANGE);//Open the external interrupt 0, connect INT1/2 to the digital pin of the main control:
//UNO(2), Mega2560(2), Leonardo(3), microbit(P0).
#endif
/**!
Set the sensor measurement range:
e2_g /<±2g>/
e4_g /<±4g>/
e8_g /<±8g>/
e16_g /< ±16g>/
*/
acce.setRange(DFRobot_LIS2DW12::e2_g);
/**!
Set power mode:
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwrLowNoise1_12bit);
/**!
Set the sensor data collection rate:
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, Measurement off>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement>/
*/
acce.setDataRate(DFRobot_LIS2DW12::eRate_800hz);
//Enable tap detection in the Z direction
acce.enableTapDetectionOnZ(true);
//Enable tap detection in Y direction
acce.enableTapDetectionOnY(true);
//Enable tap detection in the X direction
acce.enableTapDetectionOnX(true);
//The threshold setting in the X direction
//Threshold(mg),Can only be used in the range of ±2g
acce.setTapThresholdOnX(/*Threshold = */0.5);
//The threshold setting in the Y direction //Threshold(mg),Can only be used in the range of ±2g
acce.setTapThresholdOnY(/*Threshold = */0.5);
//The threshold setting in the Z direction //Threshold(mg),Can only be used in the range of ±2g)
acce.setTapThresholdOnZ(/*Threshold = */0.5);
/*
Set the interval time between two taps when detecting double tap
dur duration(0 ~ 15)
time = dur * (1/ODR)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
acce.setTapDur(/*dur=*/6);
/**!
Set tap detection mode:
eOnlySingle(single tap)
eBothSingleDouble(Single tap and double tap)
*/
acce.setTapMode(DFRobot_LIS2DW12::eBothSingleDouble);
/**!
Set the interrupt source of the int1 pin:
eDoubleTap(Double tap)
eFreeFall(Free fall)
eWakeUp(wake)
eSingleTap(single-tap)
e6D(Orientation change check)
*/
acce.setInt1Event(DFRobot_LIS2DW12::eDoubleTap);
delay(1000);
}
void loop(void){
if(intFlag == 1){
//Tap detected
DFRobot_LIS2DW12:: eTap_t tapEvent = acce.tapDetect();
//Tap direction source detection
DFRobot_LIS2DW12::eTapDir_t dir = acce.getTapDirection();
if(tapEvent == DFRobot_LIS2DW12::eSTap){
Serial.print("Single Tap Detected :");
}
if(tapEvent == DFRobot_LIS2DW12::eDTap){
Serial.print("Double Tap Detected :");
}
if(dir == DFRobot_LIS2DW12::eDirXUp){
Serial.println("tap is detected in the positive direction of X");
}else if(dir == DFRobot_LIS2DW12::eDirXDown){
Serial.println("tap is detected in the negative direction of X");
}else if(dir == DFRobot_LIS2DW12::eDirYUp){
Serial.println("tap is detected in the positive direction of Y");
}else if(dir == DFRobot_LIS2DW12::eDirYDown){
Serial.println("tap is detected in the negative direction of Y");
}else if(dir == DFRobot_LIS2DW12::eDirZUp){
Serial.println("tap is detected in the positive direction of Z");
}else if(dir == DFRobot_LIS2DW12::eDirZDown){
Serial.println("tap is detected in the negative direction of Z");
}
delay(500);
intFlag = 0;
}
}
样例代码5-自由落体检测功能(freeFall.ino)
- 选择freeFall.ino
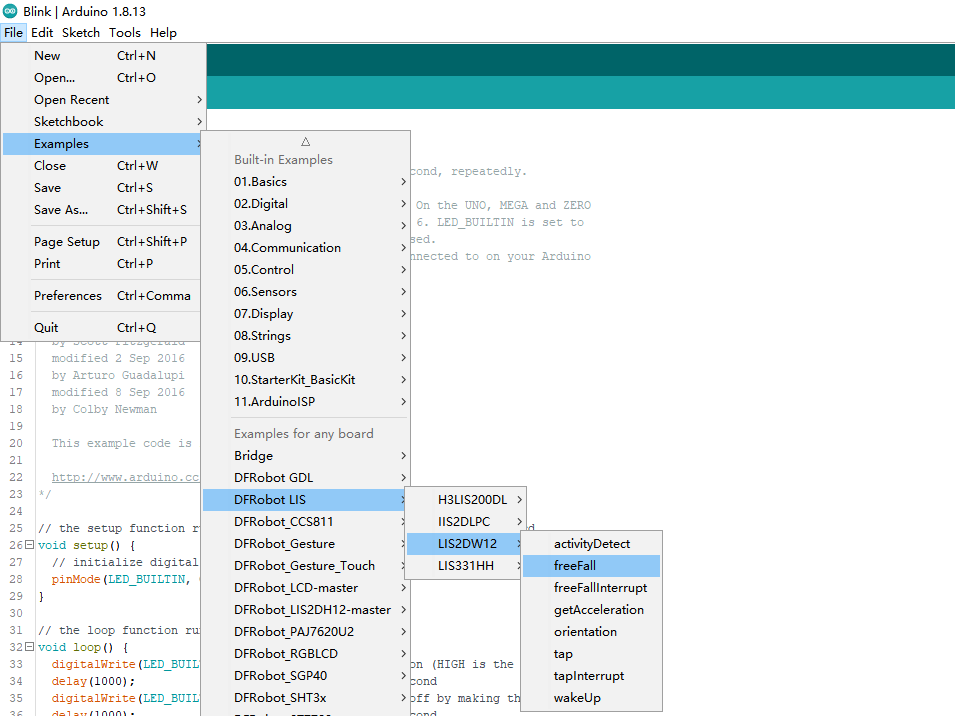
- 烧录程序
/**!
* @file freeFall.ino
* @brief Sensor module free fall detection, set the free fall time with the setFrDur() function to adjust the sensitivity of the detection.
* @n The shorter the free fall time we set, the easier for the module to detect the free fall event
* @n When using SPI, chip select pin can be modified by changing the value of LIS2DW12_CS
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli](li.feng@dfrobot.com)
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS2DW12.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS2DW12_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS2DW12_I2C acce(&Wire,0x18);
DFRobot_LIS2DW12_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS2DW12_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS2DW12_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS2DW12_CS 3
#elif (defined NRF5)
#define LIS2DW12_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
//Chip soft reset
acce.softReset();
//Set whether to collect data continuously
acce.continRefresh(true);
/**!
Set power mode:
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwr4_14bit);
/**!
Set the sensor data collection rate:
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, use only under low-power mode>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement>/
*/
acce.setDataRate(DFRobot_LIS2DW12::eRate_100hz);
/**!
Set the sensor measurement range:
e2_g /<±2g>/
e4_g /<±4g>/
e8_g /<±8g>/
e16_g /< ±16g>/
*/
acce.setRange(DFRobot_LIS2DW12::e2_g);
/**
* Set the free fall time (Or the number of free-fall samples. In a measurement, it will not be determined as a free-fall event unless the free-fall samples are sufficient.)
dur (0 ~ 31)
time = dur * (1/Rate)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
acce.setFreeFallDur(/*dur = */3);
/**!
Set the interrupt source of the int1 pin:
eDoubleTap(Double click)
eFreeFall(Free fall)
eWakeUp(wake)
eSingleTap(single-Click)
e6D(Orientation change check)
*/
acce.setInt1Event(DFRobot_LIS2DW12::eFreeFall);
delay(100);
}
void loop(void){
//Free fall event detected
if(acce.freeFallDetected()){
Serial.println("free fall detected");
delay(300);
}
}
结果

样例代码6-自由落体中断功能(freeFallInterrupt.ino)(仅Breakout版本可使用)
- 选择freeFallInterrupt.ino
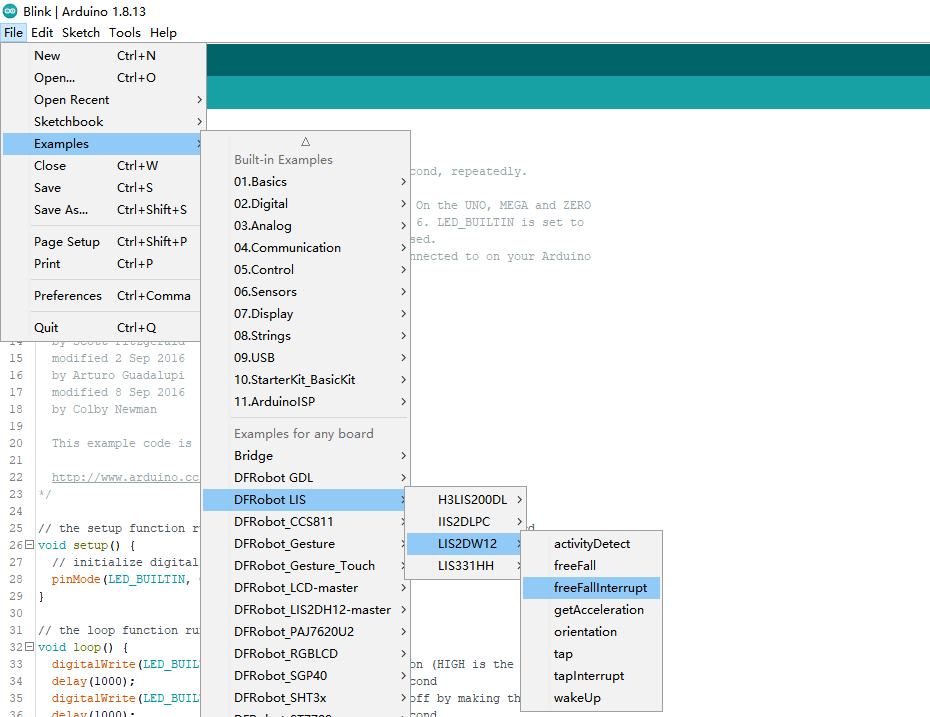
- 烧录程序
/**!
* @file freeFallInterrupt.ino
* @brief Interrupt detection of free fall, an interrupt signal will be generated in int1 once a free fall event occurs.
* @n When a free-fall motion is detected, it will be printed on the serial port.
* @n When using SPI, chip select pin can be modified by changing the value of LIS2DW12_CS
* @n In this example, the int2/int1 pin on the module needs to be connected to the interrupt pin on the motherboard. Default UNO(2),
* @n Mega2560(2), Leonardo(3), microbit(P0),FireBeetle-ESP8266(D6),FireBeetle-ESP32((D6),FireBeetle-M0(6)
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli](li.feng@dfrobot.com)
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS2DW12.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS2DW12_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS2DW12_I2C acce(&Wire,0x18);
DFRobot_LIS2DW12_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS2DW12_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS2DW12_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS2DW12_CS 3
#elif (defined NRF5)
#define LIS2DW12_CS P3
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
volatile uint8_t intFlag = 0;
void interEvent(){
intFlag = 1;
}
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
#if defined(ESP32) || defined(ESP8266)
//By default, the D6 pin is used as the interrupt pin, and other non-conflicting pins can also be selected as the external interrupt pin.
attachInterrupt(digitalPinToInterrupt(D6)/*Query the interrupt number of the D6 pin*/,interEvent,CHANGE);
#elif defined(ARDUINO_SAM_ZERO)
//By default, the 5 pin is used as the interrupt pin, and other non-conflicting pins can also be selected as the external interrupt pin.
attachInterrupt(digitalPinToInterrupt(5)/*Query the interrupt number of the pin 5*/,interEvent,CHANGE);
#else
/* The Correspondence Table of AVR Series Arduino Interrupt Pins And Terminal Numbers
* ---------------------------------------------------------------------------------------
* | | DigitalPin | 2 | 3 | |
* | Uno, Nano, Mini, other 328-based |--------------------------------------------|
* | | Interrupt No | 0 | 1 | |
* |-------------------------------------------------------------------------------------|
* | | Pin | 2 | 3 | 21 | 20 | 19 | 18 |
* | Mega2560 |--------------------------------------------|
* | | Interrupt No | 0 | 1 | 2 | 3 | 4 | 5 |
* |-------------------------------------------------------------------------------------|
* | | Pin | 3 | 2 | 0 | 1 | 7 | |
* | Leonardo, other 32u4-based |--------------------------------------------|
* | | Interrupt No | 0 | 1 | 2 | 3 | 4 | |
* |--------------------------------------------------------------------------------------
*/
/* The Correspondence Table of micro:bit Interrupt Pins And Terminal Numbers
* ---------------------------------------------------------------------------------------------------------------------------------------------
* | micro:bit | DigitalPin |P0-P20 can be used as an external interrupt |
* | (When using as an external interrupt, |---------------------------------------------------------------------------------------------|
* |no need to set it to input mode with pinMode)|Interrupt No|Interrupt number is a pin digital value, such as P0 interrupt number 0, P1 is 1 |
* |-------------------------------------------------------------------------------------------------------------------------------------------|
*/
attachInterrupt(/*Interrupt No*/0,interEvent,CHANGE);//Enable the external interrupt 0, connect INT1/2 to the digital pin of the main control:
//UNO(2), Mega2560(2), Leonardo(3), microbit(P0).
#endif
//Chip soft reset
acce.softReset();
//Set whether to collect data continuously
acce.continRefresh(true);
/**!
Set power mode:
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwr4_14bit);
/**!
Set the sensor data collection rate:
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, use only under low-power mode>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement.>/
*/
acce.setDataRate(DFRobot_LIS2DW12::eRate_100hz);
/**!
Set the sensor measurement range:
e2_g /<±2g>/
e4_g /<±4g>/
e8_g /<±8g>/
e16_g /< ±16g>/
*/
acce.setRange(DFRobot_LIS2DW12::e2_g);
//The duration of free fall (0~31), the larger the value, the longer it takes to detect a free fall event
/**
* Set the free fall time (Or the number of free-fall samples. In a measurement, it will not be determined as a free fall event unless the samples are enough.)
dur range(0 ~ 31)
time = dur * (1/Rate)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
acce.setFreeFallDur(/*dur = */3);
/**!
Set the interrupt source of the int1 pin:
eDoubleTap(Double click)
eFreeFall(Free fall)
eWakeUp(wake)
eSingleTap(single-Click)
e6D(Orientation change check)
*/
acce.setInt1Event(DFRobot_LIS2DW12::eFreeFall);
delay(100);
}
void loop(void){
if(intFlag == 1){
//Free fall event detected
delay(100);
if(acce.freeFallDetected()){
Serial.println("free fall detected");
delay(200);
}
intFlag = 0;
}
}
样例代码7-运动检测功能(activityDetect.ino)
- 选择activityDetect.ino
- 烧录程序
/**!
* @file activityDetect.ino
* @brief Motion detection, can detect whether the module is moving
* @n It’s necessary to go into low power mode before using this function. Then call setActMode() to make the chip in sleep mode.
* @n In this state, the measurement rate is 12.5hz.
* @n When the acceleration change in a certain direction is detected to exceed the threshold, the measurement rate will be increased
* @n to the normal rate we set before. The threshold can be set by the setWakeUpThreshold() function.
* @n But if the move stops moving, also, the acceleration change in the three directions is less than the threshold, the chip will turn into sleep
* @n mode after a period of time. This duration time can be set by the setWakeUpDur() function.
* @n When using SPI, chip select pin can be modified by changing the value of LIS2DW12_CS.
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli](li.feng@dfrobot.com)
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS2DW12.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS2DW12_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS2DW12_I2C acce(&Wire,0x18);
DFRobot_LIS2DW12_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS2DW12_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS2DW12_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS2DW12_CS 3
#elif (defined NRF5)
#define LIS2DW12_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
//Software reset
acce.softReset();
/**!
Set the sensor measurement range:
e2_g /<±2g>/
e4_g /<±4g>/
e8_g /<±8g>/
e16_g /<±16g>/
*/
acce.setRange(DFRobot_LIS2DW12::e2_g);
/**!
Filter settings:
eLPF(Low pass filter)
eHPF(High pass filter)
*/
acce.setFilterPath(DFRobot_LIS2DW12::eLPF);
/**!
Set bandwidth:
eRateDiv_2 ,/<Rate/2 (up to Rate = 800 Hz, 400 Hz when Rate = 1600 Hz)>/
eRateDiv_4 ,/<Rate/4 (High Power/Low power)>*
eRateDiv_10 ,/<Rate/10 (HP/LP)>/
eRateDiv_20 ,/< Rate/20 (HP/LP)>/
*/
acce.setFilterBandwidth(DFRobot_LIS2DW12::eRateDiv_4);
/**
Wake-up duration: when using the detection mode of eDetectAct in the setActMode() function, it will collect data
at a normal rate after the chip is awakened. Then after a period of time, the chip will continue to hibernate, collecting data at a frequency of 12.5hz.
dur (0 ~ 3)
time = dur * (1/Rate)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
acce.setWakeUpDur(/*dur = */2);
//Set wakeup threshold, when the acceleration change exceeds this value, the eWakeUp event will be triggered, unit:mg
//The value is within the range.
acce.setWakeUpThreshold(/*threshold = */0.2);
/**!
Set power mode:
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwrLowNoise1_12bit);
/**!
Set the mode of motion detection:
eNoDetection /<No detection>/
eDetectAct /<If set this mode, the rate of the chip will drop to 12.5hz and turn into normal measurement frequency
after the eWakeUp event is generated.>/
eDetectStatMotion /<In this mode, it can only detect if the chip is in sleep mode without changing the measurement frequency
and power mode, continuously measuring the data at normal frequency.>/
*/
acce.setActMode(DFRobot_LIS2DW12::eDetectAct);
/**!
Set the interrupt source of the int1 pin:
eDoubleTap(Double click)
eFreeFall(Free fall)
eWakeUp(wake up)
eSingleTap(single-Click)
e6D(Orientation change check)
*/
acce.setInt1Event(DFRobot_LIS2DW12::eWakeUp);
/**!
Set the sensor data collection rate:
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, use only under low-power mode>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement>/
*/
acce.setDataRate(DFRobot_LIS2DW12::eRate_200hz);
delay(100);
}
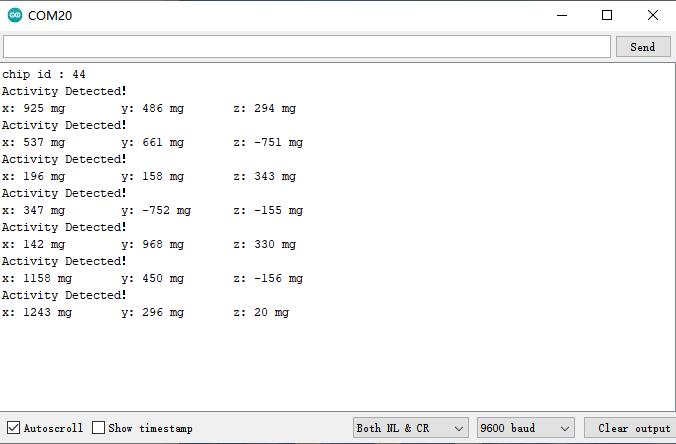
void loop(void){
//Motion detected
if(acce.actDetected()){
Serial.println("Activity Detected!");
Serial.print("x: ");
Serial.print(acce.readAccX());
Serial.print(" mg \t y: ");
Serial.print(acce.readAccY());
Serial.print(" mg \t z: ");
Serial.print(acce.readAccZ());
Serial.println(" mg");
delay(100);
}
}
结果
样例代码8-朝向检测功能(orientation.ino)
- 选择orientation.ino
- 烧录程序
/**!
* @file orientation.ino
* @brief When detecting the orientation of the module, the sensor can detect the following six events:
* @n Positive z-axis is facing up
* @n Positive z-axis is facing down
* @n Positive y-axis is facing up
* @n Positive y-axis is facing down
* @n Positive x-axis is facing up
* @n Positive x-axis is facing down
* @n When using SPI, chip select pin can be modified by changing the value of macro LIS2DW12_CS
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (https://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli](li.feng@dfrobot.com)
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS2DW12.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS2DW12_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS2DW12_I2C acce(&Wire,0x18);
DFRobot_LIS2DW12_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS2DW12_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS2DW12_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS2DW12_CS 3
#elif (defined NRF5)
#define LIS2DW12_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
int lastOrientation = 0; //No event happened
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
//Chip soft reset
acce.softReset();
/**!
Set the sensor measurement range:
e2_g /<±2g>/
e4_g /<±4g>/
e8_g /<±8g>/
e16_g /< ±16g>/
*/
acce.setRange(DFRobot_LIS2DW12::e2_g);
/**!
Set power mode:
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwrLowNoise1_12bit);
/**!
Set the sensor data collection rate:
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, use only under low-power mode>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement>/
*/
acce.setDataRate(DFRobot_LIS2DW12::eRate_200hz);
/**!
Set the threshold of the angle when turning:
eDegrees80 (80°)
eDegrees70 (70°)
eDegrees60 (60°)
eDegrees50 (50°)
*/
acce.set6DThreshold(DFRobot_LIS2DW12::eDegrees60);
/**!
Set the interrupt source of the int1 pin:
eDoubleTap(Double click)
eFreeFall(Free fall)
eWakeUp(wake)
eSingleTap(single-Click)
e6D(Orientation change check)
*/
acce.setInt1Event(DFRobot_LIS2DW12::e6D);
delay(1000);
}
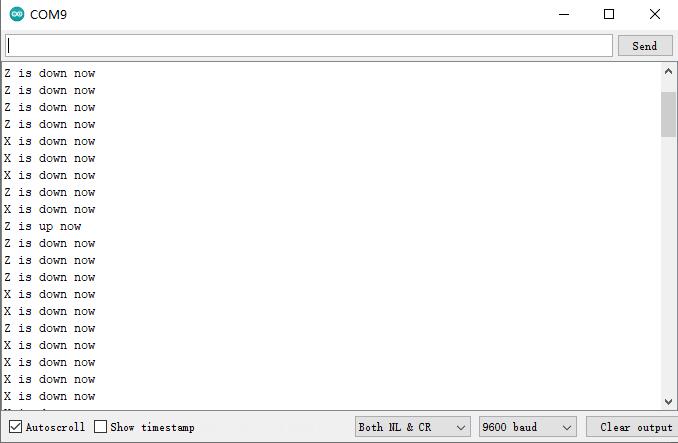
void loop(void){
//check Changes detected in six directions
if(acce.oriChangeDetected()){
DFRobot_LIS2DW12::eOrient_t orientation = acce.getOrientation();
if(lastOrientation != orientation){
if(orientation == DFRobot_LIS2DW12::eXDown){
Serial.println("X is down now");
}
if(orientation == DFRobot_LIS2DW12::eXUp){
Serial.println("X is up now");
}
if(orientation == DFRobot_LIS2DW12::eYDown){
Serial.println("Y is down now");
}
if(orientation == DFRobot_LIS2DW12::eYUp){
Serial.println("Y is up now");
}
if(orientation == DFRobot_LIS2DW12::eZDown){
Serial.println("Z is down now");
}
if(orientation == DFRobot_LIS2DW12::eZUp){
Serial.println("Z is up now");
}
lastOrientation = orientation;
}
}
}
结果
树莓派使用教程
准备
-
硬件
- 树莓派4代B型(或类似)主控板 x 1
- LIS2DW12三轴加速度计 x 1
- 若干杜邦线 x 1
-
软件
接线图
- 将模块与树莓派按照连线图相连。I2C地址默认为0x19
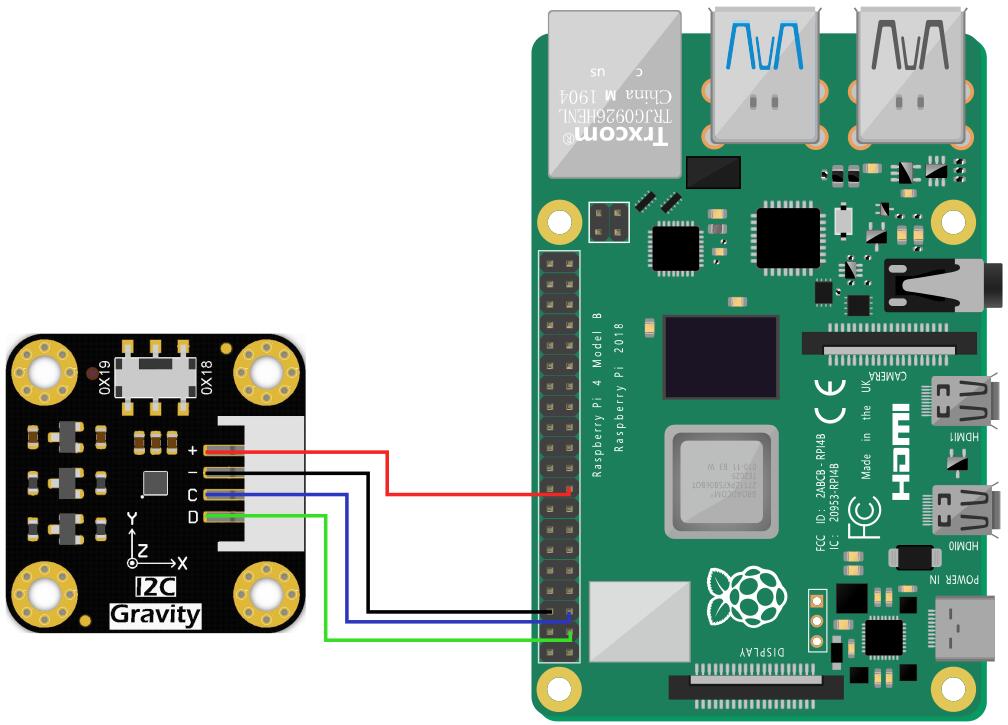
安装驱动
- 启动树莓派的I2C接口。如已开启,可跳过该步骤。
打开终端(Terminal),键入如下指令,并回车:
sudo raspi-config
然后用上下键选择“ 5 Interfacing Options ”, 按回车进入,选择 “ P5 I2C ”, 按回车确认“ YES ”即可。重启树莓派主控板。
- 安装Python依赖库与git,树莓派需要联网。如已安装,可跳过该步骤。
在终端中,依次键入如下指令,并回车:
sudo apt-get update
sudo apt-get install build-essential python-dev python-smbus git
- 下载LIS系列驱动库。在终端中,依次键入如下指令,并回车:
cd Desktop
git clone https://github.com/DFRobot/DFRobot_LIS
注意:
若您选择使用I2C(0X18)的通信方式,需要修改demo至相应的通信,您可能会遇到没有权限修改示例程序的情况,以下是解决办法:
1.在要修改的文件目录下查询权限,命令为:
ls -al
2.修改该文件权限,命令为:
sudo chmod a+w XXX.py
此时,所有人都对该文件具备写权限了。
样例代码
- 样例代码1-读取x,y,z轴加速度(get_acceleration.py)
- 样例代码2-睡眠唤醒功能(wake_up.py)
- 样例代码3-敲击检测功能(tap.py)
- 样例代码4-自由落体检测功能(free_fall.py)
- 样例代码5-自由落体中断功能(interrupt.py)(仅在Breakout版本可使用)
- 样例代码6-运动检测功能(activity_detect.py)
- 样例代码7-朝向检测功能(orientation.py)
样例代码1-读取x,y,z轴加速度(get_acceleration.py)
- 在终端中,键入如下指令并回车,运行样例代码:
cd home/pi/Desktop/DFRobot_LIS/python/raspberrypi/examples/LIS2DW12
cd get_acceleration
python get_acceleration.py
- 结果
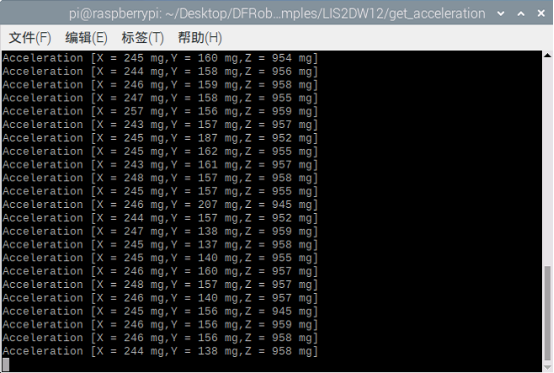
样例代码2-睡眠唤醒功能(wake_up.py)
- 在终端中,键入如下指令并回车,运行样例代码:
cd home/pi/Desktop/DFRobot_LIS/python/raspberrypi/examples/LIS2DW12
cd wake_up
python wake_up.py
- 结果

样例代码3-敲击检测功能(tap.py)
- 在终端中,键入如下指令并回车,运行样例代码:
cd home/pi/Desktop/DFRobot_LIS/python/raspberrypi/examples/LIS2DW12
cd tap
python tap.py
- 结果
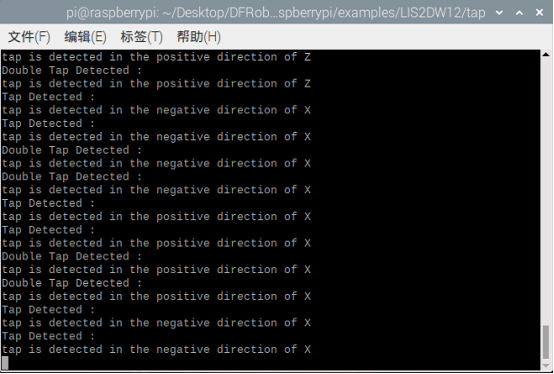
样例代码4-自由落体检测功能(free_fall.py)
- 在终端中,键入如下指令并回车,运行样例代码:
cd home/pi/Desktop/DFRobot_LIS/python/raspberrypi/examples/LIS2DW12
cd free_fall
python free_fall.py
- 结果
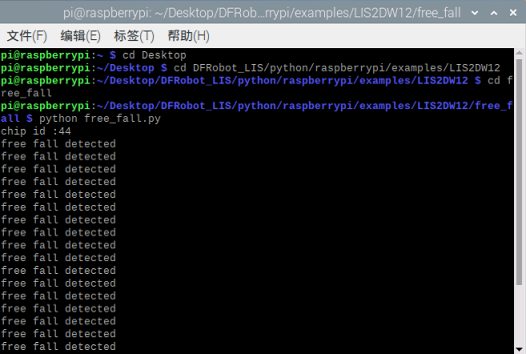
样例代码5-自由落体中断功能(interrupt.py)(仅在Breakout版本可使用)
- 在终端中,键入如下指令并回车,运行样例代码:
cd home/pi/Desktop/DFRobot_LIS/python/raspberrypi/examples/LIS2DW12
cd interrupt
python interrupt.py
样例代码6-运动检测功能(activity_detect.py)
- 在终端中,键入如下指令并回车,运行样例代码:
cd home/pi/Desktop/DFRobot_LIS/python/raspberrypi/examples/LIS2DW12
cd activity_detect
python activity_detect.py
- 结果
样例代码7-朝向检测功能(orientation.py)
- 在终端中,键入如下指令并回车,运行样例代码:
cd home/pi/Desktop/DFRobot_LIS/python/raspberrypi/examples/LIS2DW12
cd orientation
python orientation.py
- 结果
常见问题
如果有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。

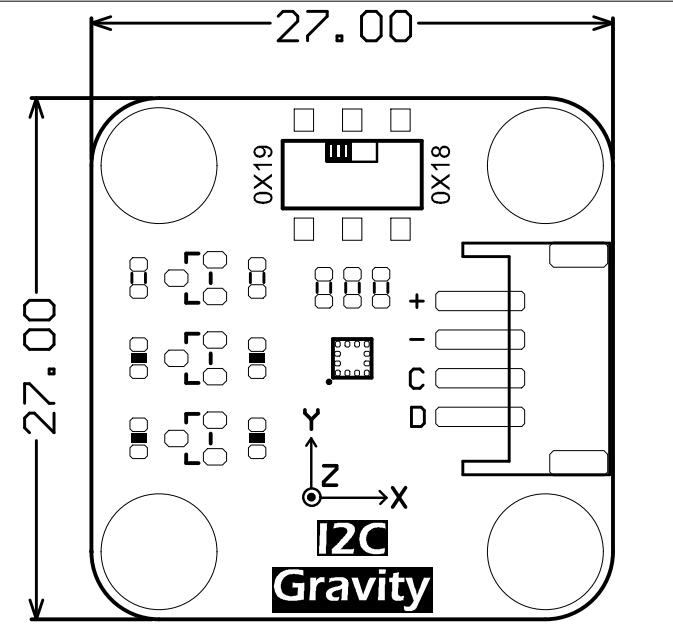{kind=link}