
简介
我们新推出了7款薄膜压力传感器,有长条的,有方形的,有圆形的,也有接触面积大的和接触面积小的,可选择性非常丰富。
这7款产品都有非常大的柔性,使用起来非常方便,撕下保护膜就可将传感器粘贴在被探测部位;同时适用范围也比较广泛,可主要用于压力开关,在床离床监测,智能跑鞋,记录受压的强度和频率以及在医疗设备上检测人体受压程度等方面。
这7款薄膜压力传感器是由综合机械性能优异的聚酯薄膜, 高导电材料和纳米级压力敏感材料组成,顶层是柔性薄膜和复合在上面的压敏层,底层是柔性薄膜和复合在上面的导电线路。两者通过双面胶贴合以及隔离感应区域。当感应区受压时,在底层彼此断开的线路会通过顶层的压敏层导通,端口的电阻输出值随着压力变化,压力越大电阻越小。
本次推出的几款薄膜压力传感器均能达到如下标准:能感知静态和动态压力感应,响应速度快,使用寿命长。
产品参数
- 厚度
- SEN0293:0.35mm
- SEN0294:0.4mm
- SEN0295:0.4mm
- SEN0296:0.45mm
- SEN0297:0.3mm
- SEN0298:0.3mm
- SEN0299:0.35mm
- 触发力
- SEN0293:小于20g,默认电阻值小于200kΩ时触发
- SEN0294:20g,默认电阻值小于200kΩ时触发
- SEN0295:20g,默认电阻值小于200kΩ时触发
- SEN0296:20g,默认电阻值小于200kΩ时触发
- SEN0297:30g,默认电阻值小于200kΩ时触发
- SEN0298:30g,默认电阻值小于200kΩ时触发
- SEN0299:小于20g,默认电阻值小于200kΩ时触发
- 压力感应范围
- SEN0293:20g~10kg或更大
- SEN0294:20g~6kg
- SEN0295:20g~6kg
- SEN0296:20g~10kg
- SEN0297:30g~1.5kg
- SEN0298:30g~1.5kg
- SEN0299:20g~10kg或更大
- 压力作用方式:静态或动态
- 未触发时电阻:大于10MΩ
- 激活时间:小于0.01S
- 使用温度:-40℃~+85℃
- 耐久性:100万次以上
- 迟滞:+10%, (RF+ -RF-)/FR+,1000g力
- 响应时间:小于10mS
- 电磁干扰EMI:不产生
- 静电释放EDS:不敏感
- 漂移:<5%, 1Kg力静载24H
使用教程
本教程介绍的是薄膜压力传感器搭配Arduino UNO主控板,在不同压力条件下串口输出端的变化。
准备
-
硬件
- DFRduino UNO x1
- 薄膜压力传感器 x1
- PC电脑 x1
- 杜邦线 若干
-
软件
- Arduino IDE
薄膜圧力曲线图
- 横坐标:压力g
- 纵坐标:电阻Ω

本传感器的工作原理为当感应区受压时,在底层彼此断开的线路会通过顶层的压敏层导通,端口的电阻输出值随着压力变化,压力越大电阻越小。即在不同压力情况下,传感器电阻值不一样,此曲线图表示的是传感器在不同压力下,压力与电阻的对应关系;横轴代表压力,纵轴代表电阻。由图可知,当受到压力值过大和过小时,斜率也会过大或者过小,所以该传感器较适合定性测量。定量测量时可能会出现数据误差太大的问题。
- R@F for C18.3:SEN0294,SEN0295
- R@F for S40:SEN0296
- R@F for C7.6:SEN0297,SEN0298
- R@F for RP-L:SEN0293,SEN0299
Arduino接线图
其中所使用的电阻为1~100K

样例代码
/*!
* @file SEN0299.ino
* @brief FSR testing sketch
* @n 将FSR的一端连接到电源,另一端连接到模拟0.然后将模拟0的10K电阻的一端连接到地
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author DFRobot
* @version V1.0
* @date 2023-08-03
*/
int fsrPin = 0; // FSR和10K下拉连接到a0
int fsrReading; //来自FSR电阻分压器的模拟读数
int fsrVoltage; //模拟读数转换为电压
unsigned long fsrResistance; // The voltage converted to resistance, can be very big so make "lo
unsigned long fsrConductance;
long fsrForce; // Finally, the resistance converted to force
void setup(void)
{
Serial.begin(9600); // We'll send debugging information via the Serial monitor
}
void loop(void)
{
fsrReading = analogRead(fsrPin);
Serial.print("Analog reading = ");
Serial.println(fsrReading);
// analog voltage reading ranges from about 0 to 1023 which maps to 0V to 5V (= 5000mV)
fsrVoltage = map(fsrReading, 0, 1023, 0, 5000);
Serial.print("Voltage reading in mV = ");
Serial.println(fsrVoltage);
if (fsrVoltage == 0) {
Serial.println("No pressure");
} else {
// The voltage = Vcc * R / (R + FSR) where R = 10K and Vcc = 5V
// so FSR = ((Vcc - V) * R) / V yay math!
fsrResistance = 5000 - fsrVoltage; // fsrVoltage is in millivolts so 5V = 5000mV
fsrResistance *= 10000; // 10K resistor
fsrResistance /= fsrVoltage;
Serial.print("FSR resistance in ohms = ");
Serial.println(fsrResistance);
fsrConductance = 1000000; // we measure in micromhos so
fsrConductance /= fsrResistance;
Serial.print("Conductance in microMhos: ");
Serial.println(fsrConductance);
// Use the two FSR guide graphs to approximate the force
if (fsrConductance <= 1000) {
fsrForce = fsrConductance / 80;
Serial.print("Force in Newtons: ");
Serial.println(fsrForce);
} else {
fsrForce = fsrConductance - 1000;
fsrForce /= 30;
Serial.print("Force in Newtons: ");
Serial.println(fsrForce);
}
}
Serial.println("--------------------");
delay(1000);
}
结果
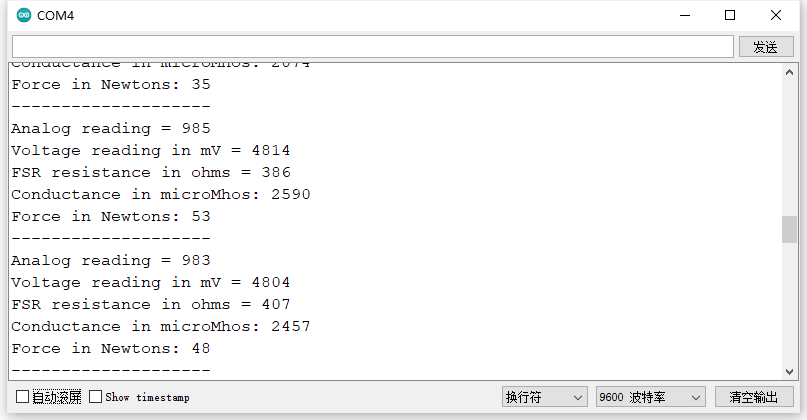
样例代码
/*!
* @file piezoVibrationSensor.ino
* @brief This example The sensors detect vibration
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author linfeng(490289303@qq.com)
* @version V1.0
* @date 2016-02-26
*/
#define sensorPin A0
void setup()
{
Serial.begin(115200);
}
void loop()
{
int x = analogRead(sensorPin);
Serial.println(x);
delay(50);
}
结果

用手接触传感器,如上图所示,观察到串口数据会发生变化,施加的压力大小不同,串口显示的数值不一样,所施加的压力和串口显示数值成线性减小关系,由于是模拟量,只推荐定性测量。
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖!
