概述
想要摇一摇切换彩灯,但又不想使用编程复杂,成本又高的三轴加速度传感器?这款数字晃动传感器一定能满足你的需要。
数字晃动传感器是一款对单方向手摇运动敏感的数字传感器。采用弹簧式震动开关,静止时输出高电平,当用户沿指定方向用力晃动一次,模块输出一个低电平脉冲,板载指示灯同时闪亮。得益于震动开关的单方向敏感特性和相应的滤波电路,中等强度的碰撞或震动(如:跌落、撞击)也不会误触发产生中断信号,具有较强的抗冲击干扰能力。只要摇一摇,挥一挥,各类开关控制尽在手中。
特性
- 单方向敏感,抗冲击干扰强,防止误触发
- 兼容3.3V/5V控制器
- 精致小巧,方便安装
应用场景
- 摇摇棒
- 摇一摇开关控制
技术规格
- 输入电压:3.3V~5.0V
- 开关寿命:20万次以上
- 接口类型:Gravity 3P数字接口
- 产品尺寸:30.0mm×22.0mm
接口说明
 | |
| |
| 标号 | 名称 | 功能描述 |
|---|---|---|
| + | VCC | 电源正极(3.3~5.0V) |
| - | GND | 电源负极 |
| D | Digital | 数字输出(静止高电平,晃动低电平脉冲) |
| PWR | Power | 电源指示灯(红色),上电点亮 |
| ON | ON | 晃动触发指示灯(蓝色) |
特性说明
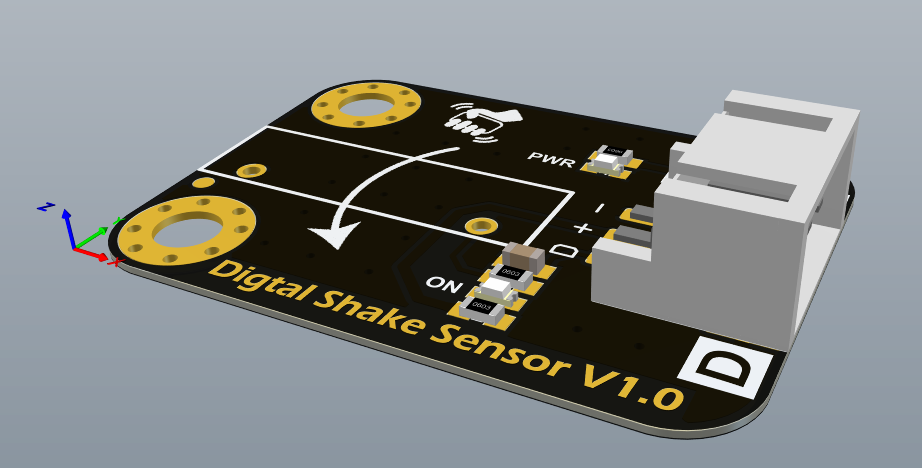
传感器所使用的震动开关具有单方向敏感特性。如上图,用户按照模块图示logo握住模块,沿箭头方向(自+Y向Y-)方向用力一甩,即可在“D”引脚产生一次有效的低电平中断脉冲,同时ON产生较明亮的闪烁。对X或Z方向的摇晃、撞击或者震动不敏感,但如果晃动剧烈仍能触发中断。
使用时,检测中断信号并适当增加抖动时间将使触发器更加稳定。
Arduino使用教程
准备
-
硬件
- Arduino UNO控制板 x 1
- Gravity:晃动传感器 x 1
- Gravity 3P数字传感器线(或若干杜邦线) x 1
-
软件
- Arduino IDE (1.0.x或1.8.x), 点击下载Arduino IDE
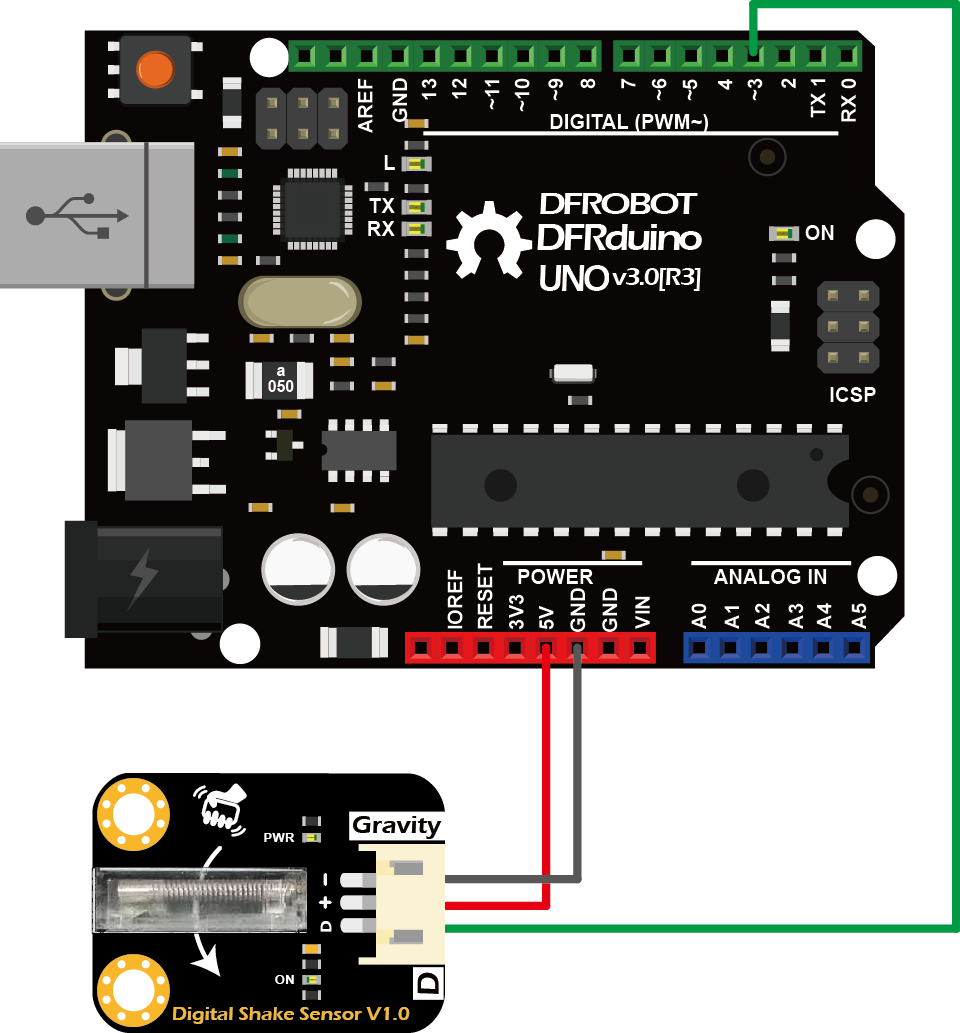
连线图
样例代码
const int interruptPin = 2; // D2引脚连接到中断引脚
const int ledPin = 13; // D13引脚连接到LED
volatile bool interruptFlag = false;
unsigned long lastInterruptTime = 0;
const unsigned long debounceDelay = 1000; // 中断防抖延迟时间(1秒)
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(interruptPin, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(interruptPin), handleInterrupt, RISING);
}
void loop() {
if (interruptFlag) {
interruptFlag = false;
if (millis() - lastInterruptTime >= debounceDelay) {
digitalWrite(ledPin, !digitalRead(ledPin));
lastInterruptTime = millis(); /
}
}
}
void handleInterrupt() {
interruptFlag = true;
}
结果
- 按照模块箭头所示方向,每用力晃动模块一次,传感器上的ON指示灯闪烁一次,Arduino UNO上的指示灯L点亮状态翻转一次。
Micro:bit使用教程
准备
-
硬件
- Micro:bit 编程入门开发板 x 1
- Micro:mate 多功能I/O扩展板 x 1
- Gravity:晃动传感器 x 1
- 数字传感器线(或若干杜邦线) x 1
-
软件
- Microsoft Makecode在线版, 点击进入
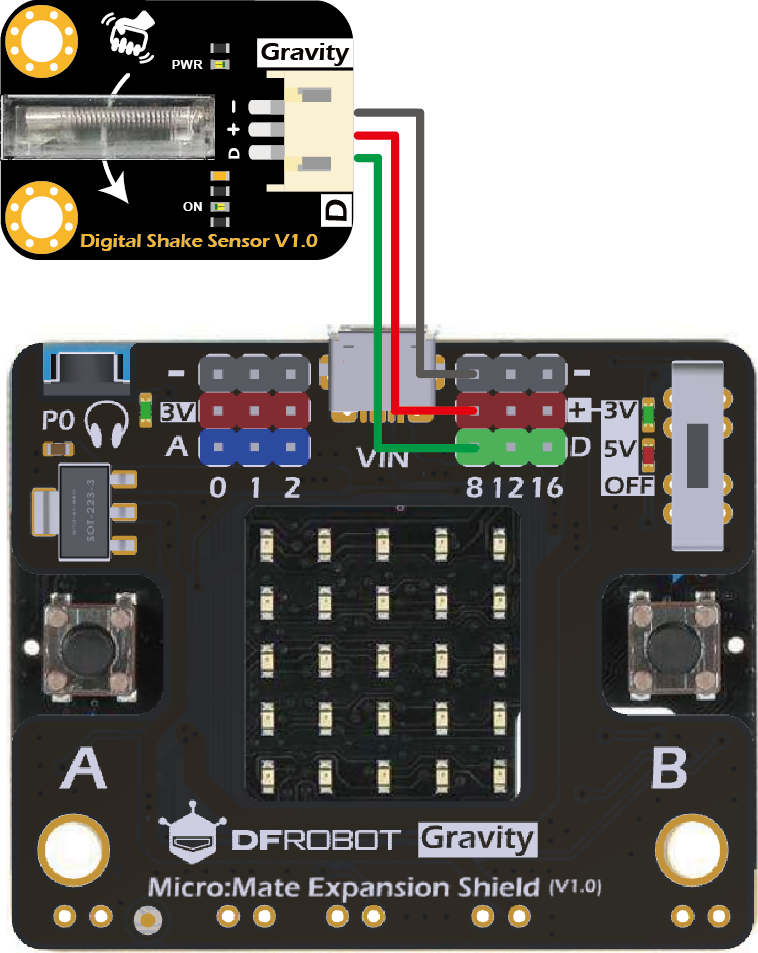
连线图
样例代码

结果
- 按照模块箭头所示方向,用力多次晃动模块,点阵LED显示心跳图案。
摇一摇 — 行空板K10
项目功能描述
沿箭头方向用力晃动模块 , 模块短暂输出一次触发信号;行空板K10 捕捉到该信号后切换板载 LED 状态。
硬件准备
| 器材 | SKU / 型号 | 数量 |
|---|---|---|
| 行空板K10 | DFR0992 | 1 |
| 数字晃动传感器 | SEN0289 | 1 |
| 两头PH2.0-3P白色硅胶绞线 | — | 1 |
| Type-C 数据线 | — | 1 |
连线说明
| 模块 | 模块端口引脚 | 扩展板接口 | 注意事项 |
|---|---|---|---|
| 数字晃动传感器 | VCC-GND-Signal | K10 P1 | 沿箭头方向晃动触发 |
示例程序
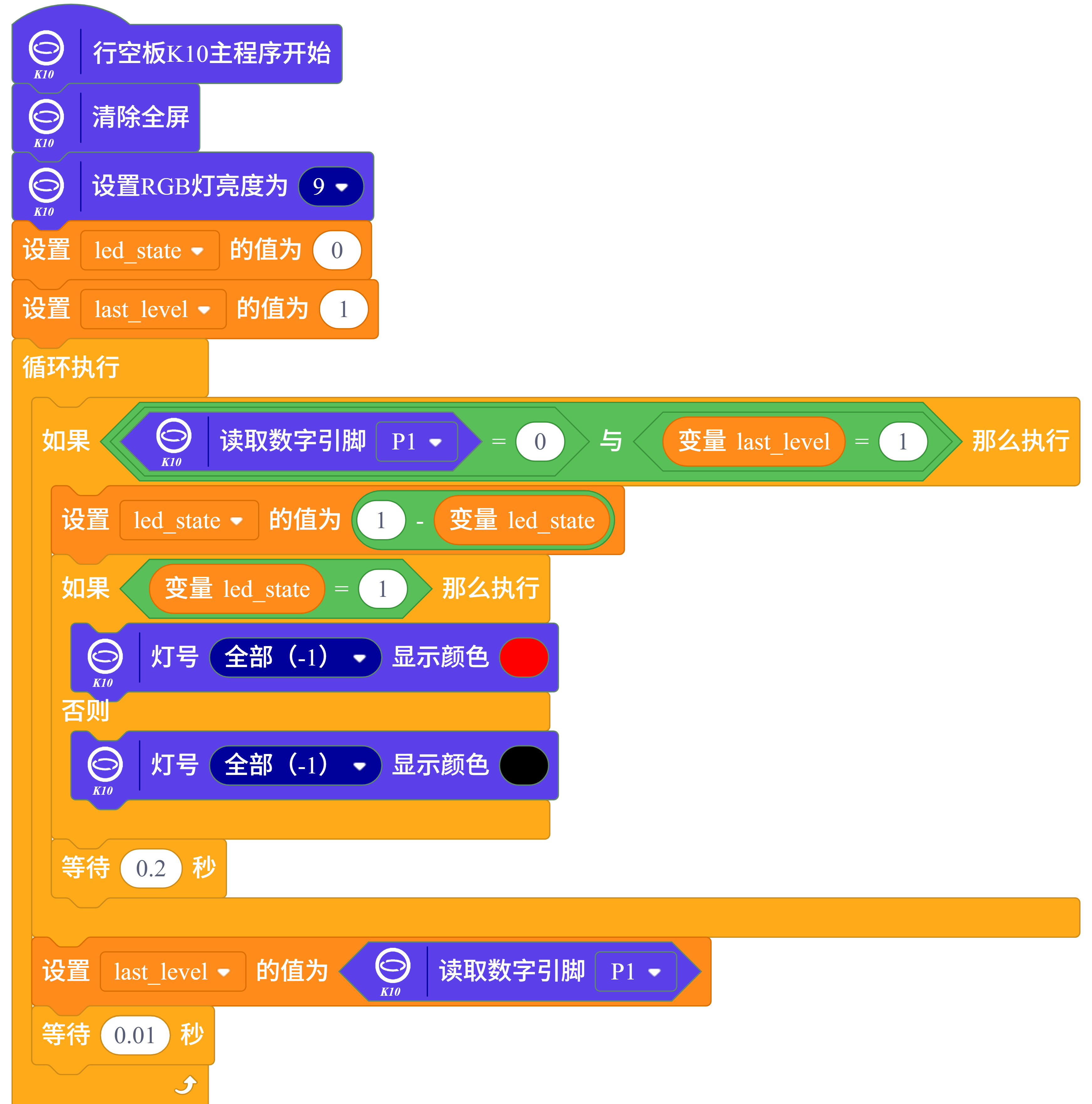
运行效果
沿箭头方向甩一次 , 板载 RGB 亮;再甩一次 , RGB 熄灭。
若无效,请检查连接线是否插在对应的引脚。
常见问题
Q1. 为什么ON出现闪烁,但是UNO上的指示灯不翻转?
- A. 轻微甩动、手指轻弹、撞击传感器时,ON会微微闪烁,但UNO上指示灯L不翻转属正常现象。只有用力往箭头方向甩动,ON出现较明亮闪烁,L点亮状态才会翻转。
Q2. 这个传感器不灵敏啊,灵敏度可以调节吗?
- A. 不能。为了排除其它震动与冲击的干扰,误触发主控,传感器的灵敏度设置相对较低,仅对特定方向适当用力的摇晃(甩动)有效。经过测试,该灵敏度较好地平衡了抗冲击性能与(手)摇晃检测的有效性。
Q3. 通过“analogRead() == 0”这类检测低电平的方法检测摇晃不太好用。
- A. '当有摇晃时,传感器产生窄的低电平脉冲,主控未必能正确检测出来。建议按照样例代码,使用沿跳变外部中断方式检测是否产生摇晃。
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
