
简介
TCS34725是一款低成本,高性价比的RGB全彩颜色识别传感器,传感器通过光学感应来识别物体的表面颜色。支持红、绿、蓝(RGB)三基色,支持明光感应,可以输出对应的具体数值,帮助您还原颜色本真。
为了提高精度,防止周边环境干扰,我们特意在传感器底部添加了一块红外遮光片,最大程度减小了入射光的红外频谱成份,让颜色管理更加准确。板载自带四个高亮LED,可以让传感器在低环境光的情况下依然能够正常使用,实现“补光”的功能。模块采用I2C通信,拥有PH2.0和XH2.54(面包板)两种接口,用户可以根据自己的需求来选择接口,更加便利。
产品参数
- 工作电压:3.3-5V
- 工作电流:65uA
- 检测距离:3-10mm
- 时钟频率:0-400KHZ
- 接 口:I2C接口和2.54间距接口
- I2C地址:0x29
- 温度范围:-30℃ ~ +70℃
- 尺 寸:18.5 mm * 23 mm
- 重量:12 g
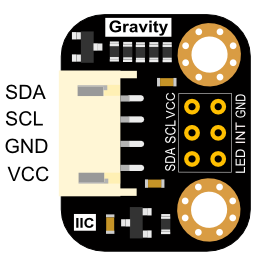
引脚说明
| 标号 | 名称 | 功能描述 |
|---|---|---|
| 1 | I2C | I2C接口:SDA SCL GND VCC |
| 2 | SDA | I2C数据信号 |
| 3 | SCL | I2C时钟信号 |
| 4 | VCC | 电源正极3.3-5V |
| 5 | GND | 电源负极 |
| 6 | LED | 控制传感器附近的4个LED灯,高信号或者悬空时LED灯亮,低信号灭 |
| 7 | INT | 中断输出,低电平有效 |
注意:
- 本模块的I2C地址是0x29
- 使用XH2.54(面包板兼容)接口时,需要自行焊接
- 底部红外遮光片上的一层保护纸可以撕下来
使用教程
将颜色传感器放在色卡10mm处,检测不同的颜色,RGB灯显示出与色卡相应的颜色。
准备
- 硬件
- UNO x1
- 颜色传感器 x1
- RGB灯模块 x1
- 4P传感器线 x1
- 软件
- Arduino IDE 版本1.6.8 点击下载Arduino IDE
DFRobot_TCS34725 Arduino库(Github)。
- Arduino IDE 版本1.6.8 点击下载Arduino IDE
接线图

将传感器放置于被测物体正面,间距控制在3~10mm之间。
如果使用RGB灯需要将对应引脚置高/低
样例代码
DFRobot_TCS34725 Arduino库(Github)。
如何安装库?
/*!
* @file colorview.ino
* @brief Gets the ambient light color
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author PengKaixing(kaixing.peng@dfrobot.com)
* @version V1.0.0
* @date 2022-03-16
* @url https://github.com/DFRobot/DFRobot_TCS
*/
#include "DFRobot_TCS34725.h"
DFRobot_TCS34725 tcs = DFRobot_TCS34725(&Wire, TCS34725_ADDRESS,TCS34725_INTEGRATIONTIME_24MS, TCS34725_GAIN_1X);
void setup()
{
Serial.begin(115200);
Serial.println("Color View Test!");
while(tcs.begin() != 0)
{
Serial.println("No TCS34725 found ... check your connections");
delay(1000);
}
}
void loop() {
uint16_t clear, red, green, blue;
tcs.getRGBC(&red, &green, &blue, &clear);
tcs.lock();
Serial.print("C:\t"); Serial.print(clear);
Serial.print("\tR:\t"); Serial.print(red);
Serial.print("\tG:\t"); Serial.print(green);
Serial.print("\tB:\t"); Serial.print(blue);
Serial.println("\t");
// Figure out some basic hex code for visualization
uint32_t sum = clear;
float r, g, b;
r = red; r /= sum;
g = green; g /= sum;
b = blue; b /= sum;
r *= 256; g *= 256; b *= 256;
Serial.print("\t");
Serial.print((int)r, HEX); Serial.print((int)g, HEX); Serial.print((int)b, HEX);
Serial.println();
}
Mind+(基于Scratch3.0)图形化编程
- 下载Mind+编程软件。 点击下载Mind+
- 详细安装教程:Mind+基础wiki教程-软件下载安装
- 打开Mind+软件,选择上传模式,“扩展”中选择“主控板”中的“Arduino Uno”,然后点击传感器,输入SEN0212,选择颜色识别传感器。
- 进行编程,程序如下图:
- 菜单“连接设备”,“上传到设备”
- 程序上传完毕后,打开串口即可看到数据输出。
程序下载:点击下载

结果

红色R的值高于蓝色B和绿色G,RGB灯的的颜色偏红色。
Mind+ Python模式编程(行空板)
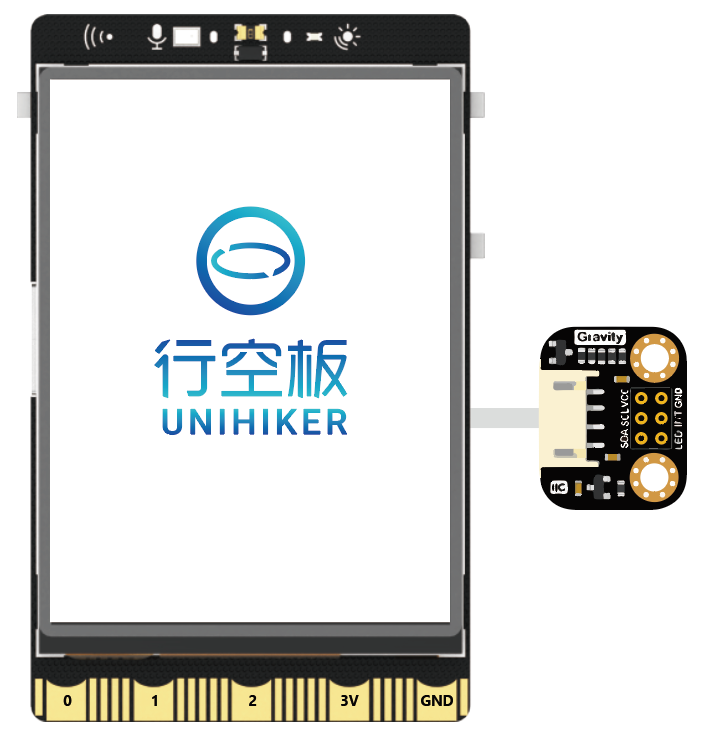
Mind+Python模式为完整Python编程,因此需要能运行完整Python的主控板,此处以行空板为例说明
连接图
操作步骤
1、下载及安装官网最新软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装
2、切换到“Python模式”。“扩展”中选择“官方库”中的“行空板”和“pinpong库”中的”pinpong初始化“和“颜色识别传感器”。切换模式和加载库的详细操作链接
3、进行编程
4、连接行空板,程序点击运行后,可在终端查看数据。行空板官方文档-行空板快速上手教程 (unihiker.com)
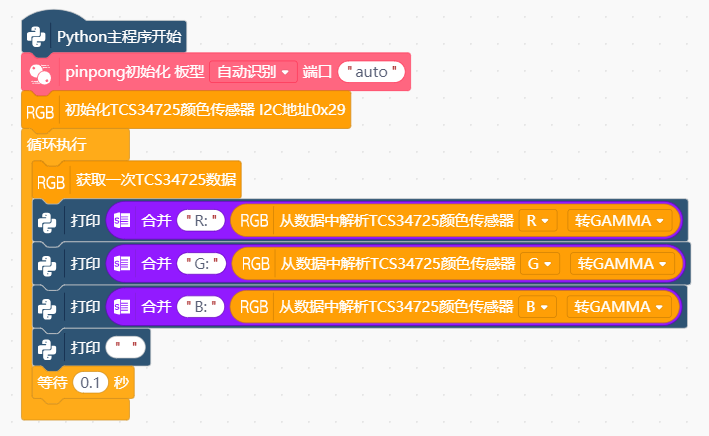
代码编程
以pinpong库为例,行空板官方文档-行空板快速上手教程 (unihiker.com)
# -*- coding: UTF-8 -*-
# MindPlus
# Python
from pinpong.libs.dfrobot_tcs34725 import TCS34725
from pinpong.board import Board
import time
Board().begin()
p_tcs34725 = TCS34725()
print("Initialize until successful")
while True:
if p_tcs34725.begin():
print("Found sensor")
break
else:
print("No TCS34725 found ... check your connections")
time.sleep(1)
while True:
p_tcs34725list = p_tcs34725.get_rgbc()
print((str("R:") + str(int((p_tcs34725list[0]/p_tcs34725list[3])*256))))
print((str("G:") + str(int((p_tcs34725list[1]/p_tcs34725list[3])*256))))
print((str("B:") + str(int((p_tcs34725list[2]/p_tcs34725list[3])*256))))
print("")
time.sleep(0.1)
颜色检测 — 行空板K10
项目功能描述
本项目使用 SEN0212(TCS34725)I2C 颜色识别传感器实现颜色检测:模块可识别物体表面颜色的 RGB 分量与色温。通过 I2C 通信将数据发回行空板K10 并在终端显示。
硬件准备
| 器材 | SKU / 型号 | 数量 |
|---|---|---|
| 行空板K10 | DFR0992 | 1 |
| I2C 颜色识别传感器 | SEN0212 | 1 |
| I2C 地址转换器 | DFR1193 | 1 |
| 两头PH2.0-4P白色硅胶绞线 | — | 2 |
| Type-C 数据线 | — | 1 |
连线说明
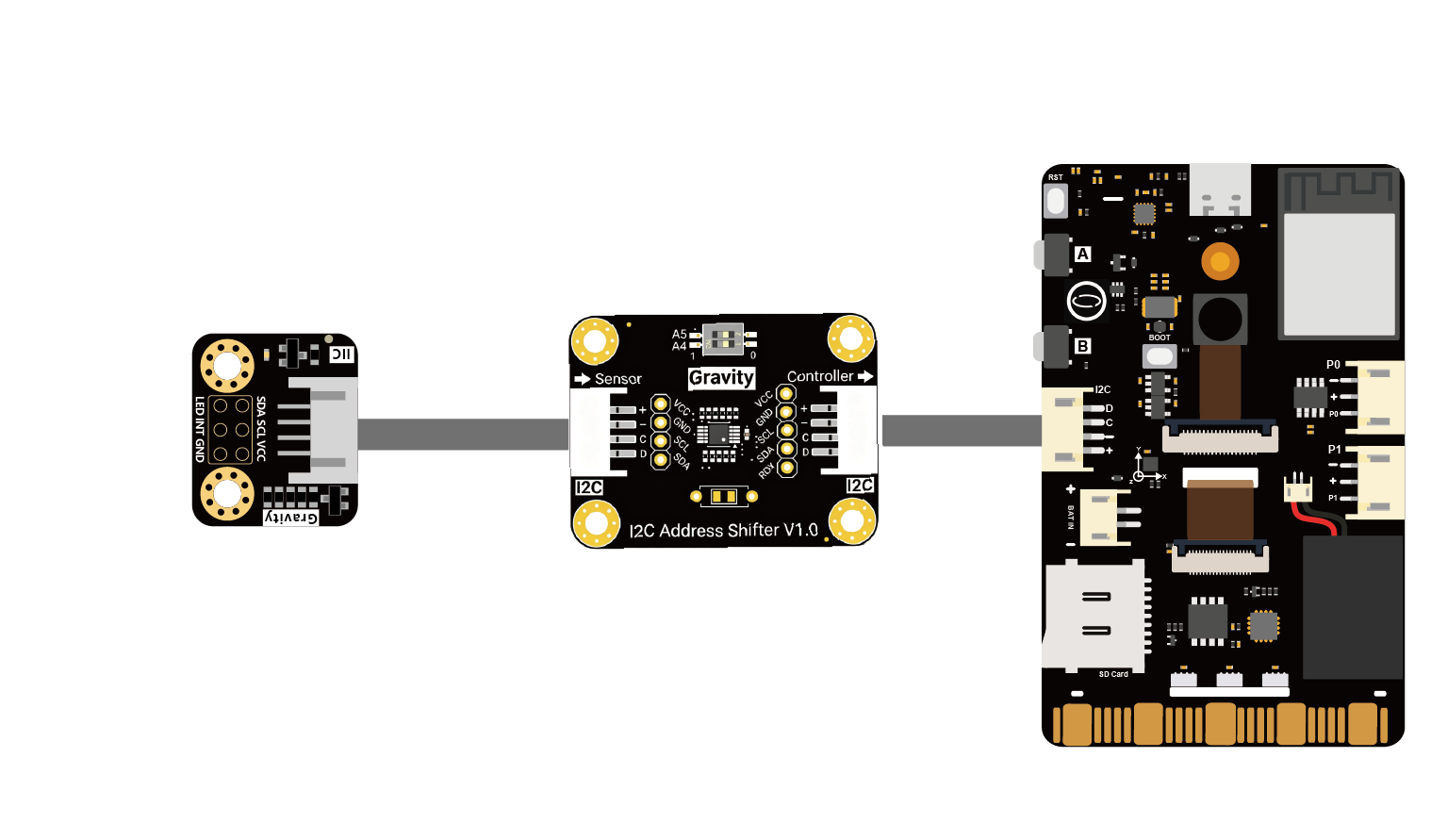
| 模块 | 模块端口引脚 | 扩展板接口 | 注意事项 |
|---|---|---|---|
| 颜色识别传感器 | VCC-GND-SDA-SCL | → 地址转换器 DFR1193(A4A5 拨至 00) | — |
| 地址转换器 DFR1193 | VCC-GND-SDA-SCL | K10 I2C | I2C 地址 0x29 |
软件准备
本项目需搭配 I2C 地址转换器 DFR1193(A4A5 拨至 00)使用,并加载颜色识别传感器库,步骤如下:
- 打开 MIND+ 软件(V1.8.1 RC1.0 及以上版本)。
- 选择「上传模式」,并添加主控板为「行空板K10」,使用 Type-C 数据线连接行空板K10 与电脑。
- 点击左下角「扩展」→ 在「传感器」分类中搜索「SEN0212」并加载。
示例程序(行空板K10)
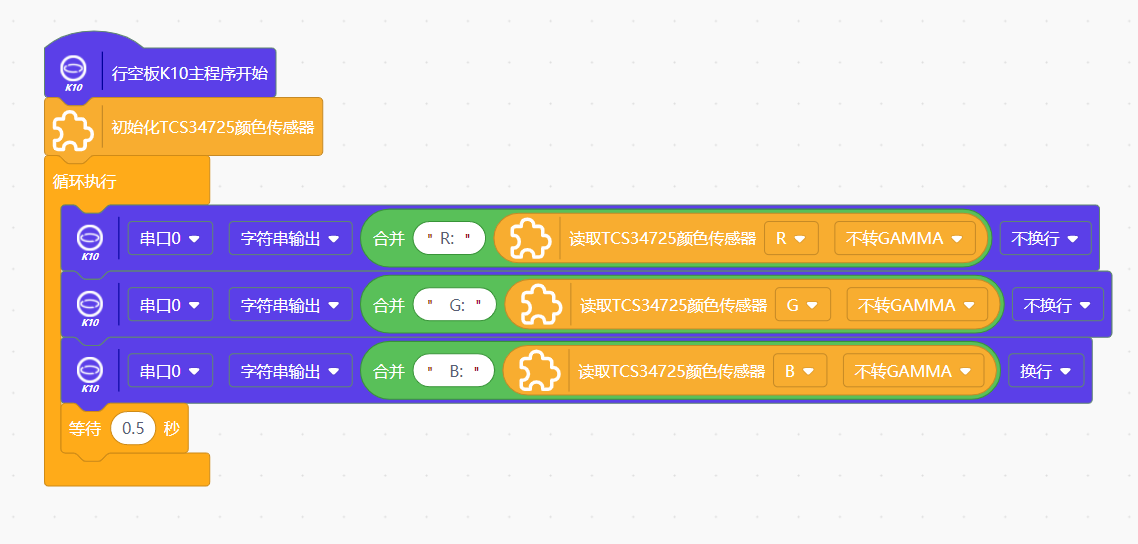
运行效果
将传感器对准红色物体 , R 通道值远大于 G / B;对准蓝色 , B 最大;对准白色 , RGB 三通道均大。
若无效请检查连接线是否插在对应的引脚(SDA 与 SCL 不能反)。
常见问题
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖!
