1. 产品简介
我叫麦昆
大家好,我叫麦昆,是一款面向创客教育的图形化编程机器人,继承了micro:bit可玩性高和上手简单的特点。
迷你的车身,有趣的功能,和即插即用的免接线方式能够让小孩在寓教于乐中快速学习图形化编程,培养小孩对科学的兴趣以及逻辑思维能力。
2. 麦昆具有哪些功能和特点?
-
支持makecode图形化编程,支持基于Mind+的图形化编程及python编程
-
体积迷你,移动灵活
-
全金属微型减速电机,质量优良,驱动力强
-
巡线、氛围灯、LED车灯、超声波接口、蜂鸣器、I2C接口、舵机专用接口、金手指接口、Gravity扩展口、机械扩展螺孔等等......功能齐全,扩展性强
-
独家定制的赛钢材料支撑轮,灵活可靠,越障能力强
-
安装简单,轻松上手
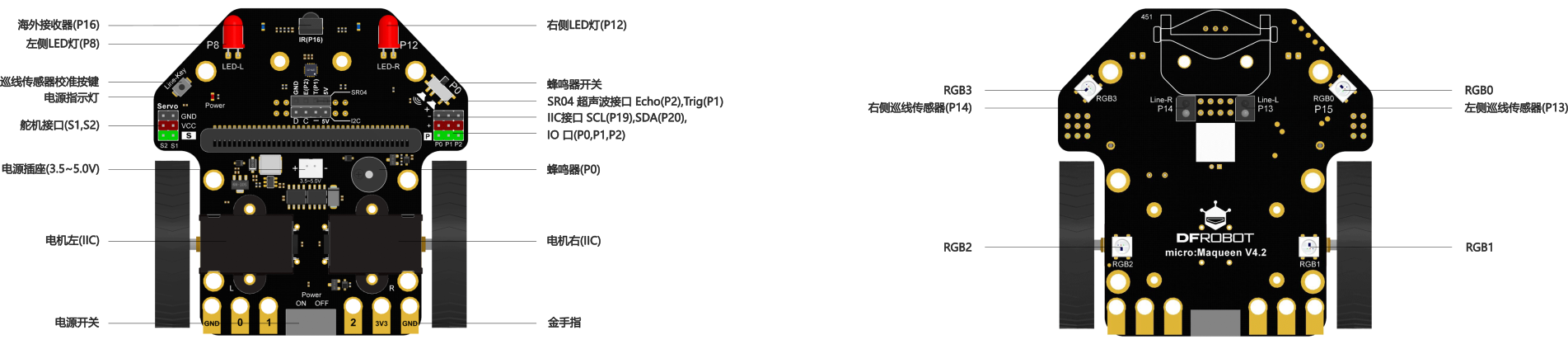
3. 功能图解
4. 产品参数
- 供电电压:3.5V~5V DC(3节7号干电池或3.6V~3.7V锂电池)
- 红外巡线传感器(高低电平)×2
- 嗡鸣器×1
- 红外接收(NEC编码)×1
- LED车灯(高低电平控制)×2
- RGB氛围灯(全彩1600万色)×4
- SR04、SR04P超声波接口(5V))×1
- I2C接口(5V)×1
- 舵机专用接口 ×2(S1 S2)
- Gravity扩展口 ×2 (P0 P1 P2)
- N20金属减速电机×2
- 电机减速比:1:75
- 电机最大转速:260转/分
- 电机驱动方式:PWM电机驱动
- 支架及保护盖扩展M3螺丝孔×6
- 编程方式:makecode图形化编程、Mind+图形化编程、python编程(Mind+)
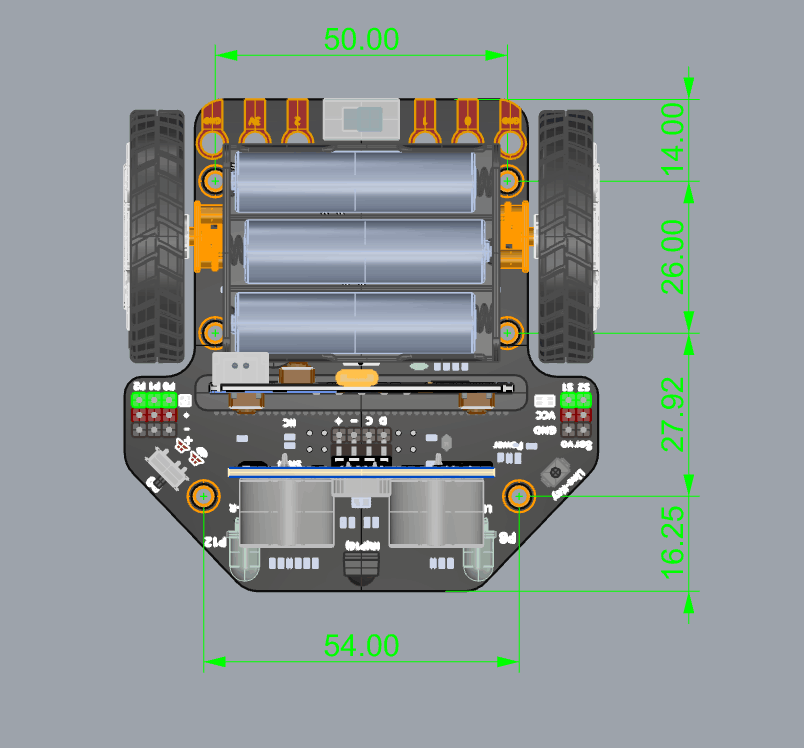
- 产品尺寸:宽81mm×长85mm×高44mm(不含micro:bit主板高度)
- 产品重量:75.55g(不含电池,不含micro:bit主板及周边配件)
5. 产品标准配置清单
- 车体(出厂已安装好电机和支撑轮)×1
- 轮子×2
- 3节7号电池盒×1
- 双面胶×1
6. 产品安装

7. 麦昆项目卡教程Mind+版本
重要更新:麦昆项目卡教程Mind+版:

下载地址:https://www.dfrobot.com.cn/images/upload/File/20190726113410dej0rm.pdf
7-1.麦昆工程队零售版教程
更新:麦昆工程队零售版教程
教程下载地址:https://www.dfrobot.com.cn/images/upload/File/20191215172005zoelvk.pdf
7-2. Mind+编程流程
1、下载及安装软件。下载地址:https://www.mindplus.cc 详细教程:Mind+基础wiki教程-软件下载安装

2、切换到“上传模式”。 详细教程:Mind+基础wiki教程-上传模式编程流程
3、“扩展”中选择“套件”中的“麦昆”。 详细教程:Mind+基础wiki教程-加载扩展库流程
4、进行编程,程序如下:
5、菜单“连接设备”,选择一个“COM-microbit”(如果第一次使用则点击“一键安装驱动”Mind+基础wiki教程-驱动的安装),然后点击“上传到设备”
8. Mind+编程实例
Mind+控制麦昆代码
注意:Mind+菜单中示例程序中有很多内置的代码且不断更新,可以方便查看。
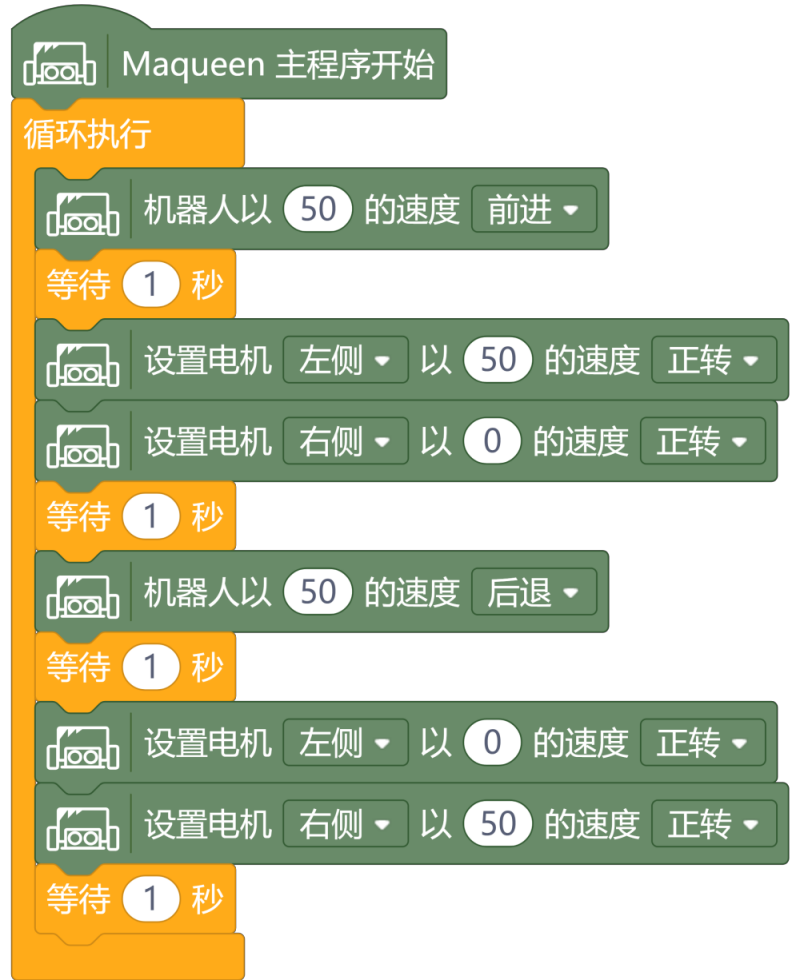
8-1. 电机控制
学习目标:掌握Maqueen的电机控制基本方法。
程序效果展示:小车前进1秒,左转1秒,后退1秒,右转1秒。
Mind+ 图形化程序截图
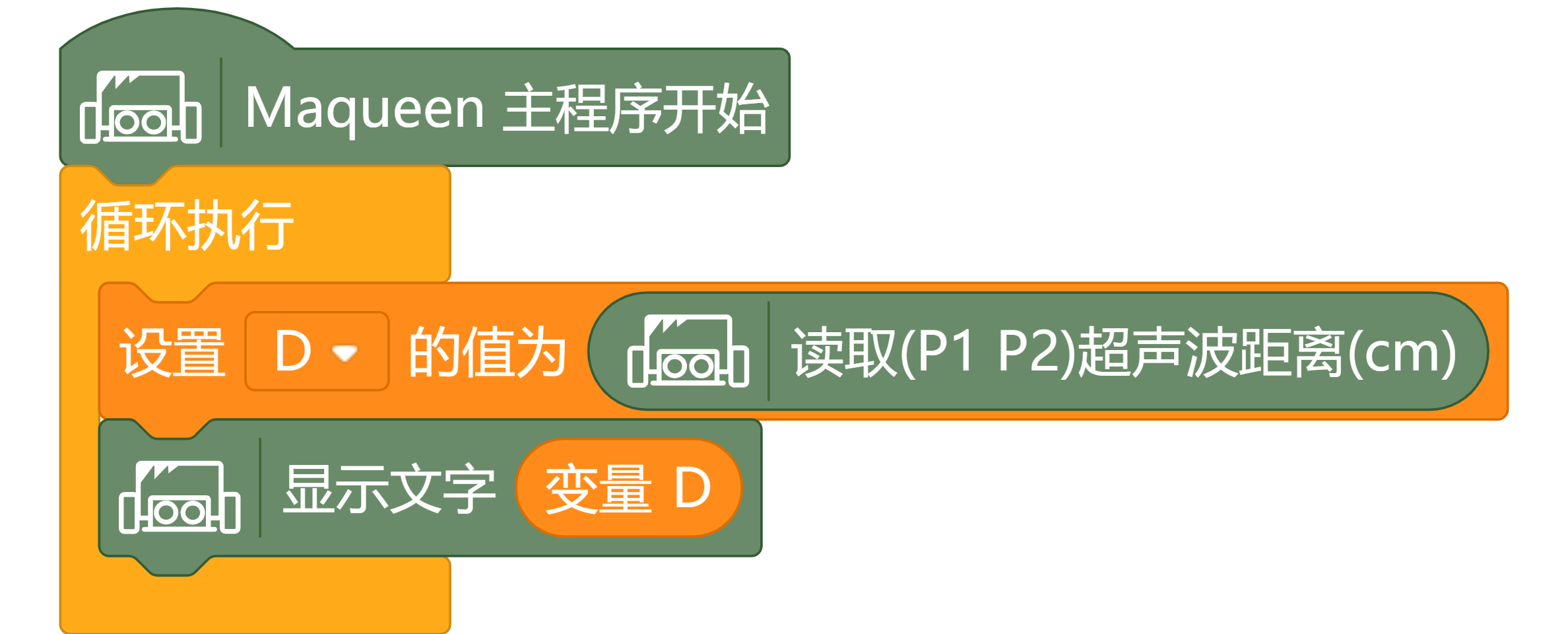
8-2. 读取超声波距离值
学习目标:使用超声波测距离。
程序效果展示:使用超声波测距离,并在micro:bit点阵屏上显示出来。
Mind+ 图形化程序截图
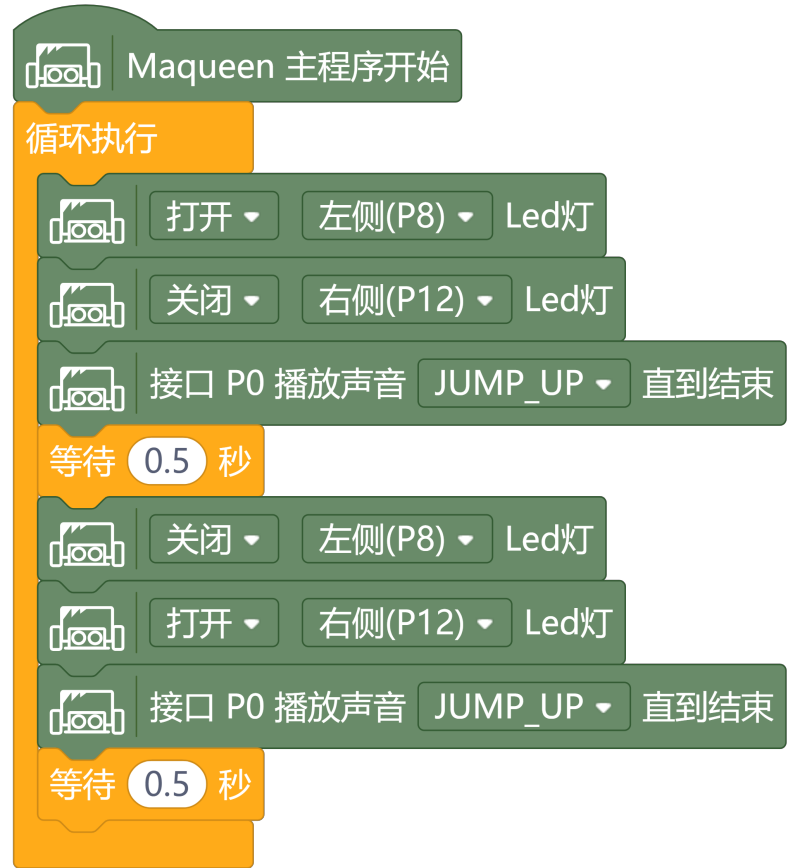
8-3. 点亮LED车灯
学习目标:点亮LED车灯和蜂鸣器的基本使用方法。
程序效果展示:左右两颗LED车灯交替闪烁,蜂鸣器播放JUMP_UP音乐。
Mind+ 图形化程序截图
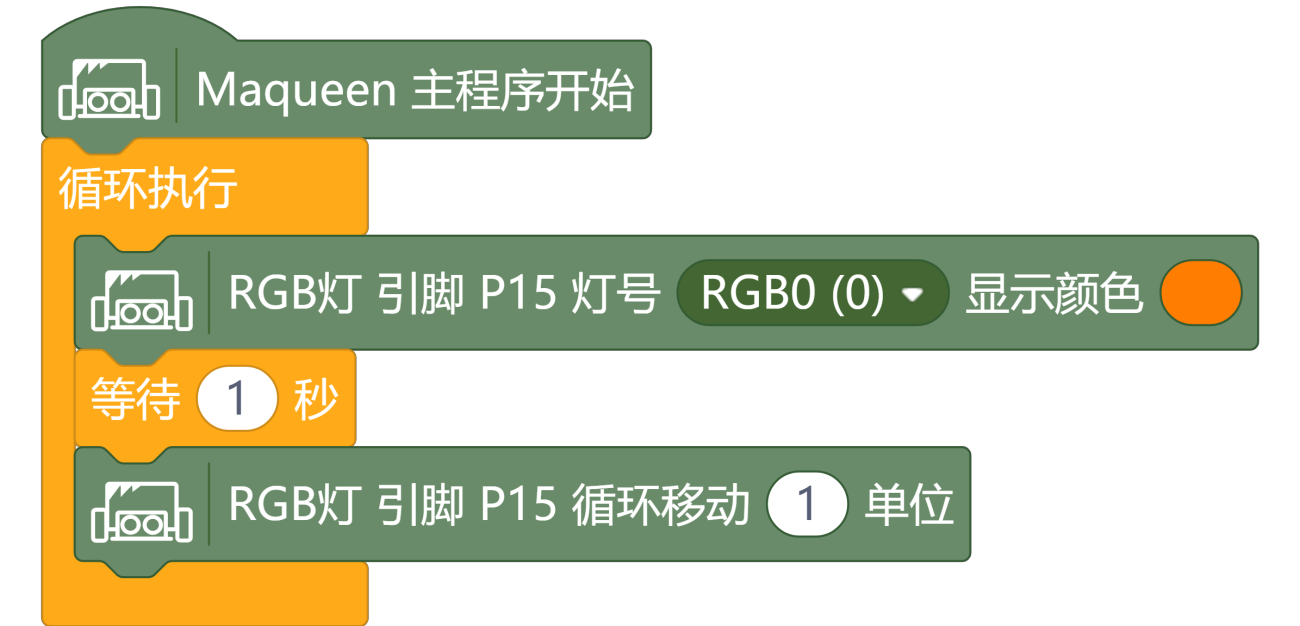
8-4. 点亮氛围灯
学习目标:点亮氛围灯。
程序效果展示:每隔一秒,依次点亮4颗氛围灯。
Mind+ 图形化程序截图
8-5. 读取红外线键值
学习目标:读取红外线遥控器按键的值。
程序效果展示:按下遥控器上面的按键,在LED点阵屏上显示的数值就是该按键的键值。
Mind+ 图形化程序截图

| 按键 | 码值 |
|---|---|
| 红色按钮 | 255 |
| VOL+ | 127 |
| FUNC/STOP | 191 |
| 左箭头 | 223 |
| 暂停 | 95 |
| 右箭头 | 159 |
| 下箭头 | 239 |
| VOL- | 111 |
| 上箭头 | 175 |
| 0 | 207 |
| EQ | 79 |
| ST/REPT | 143 |
| 1 | 247 |
| 2 | 119 |
| 3 | 183 |
| 4 | 215 |
| 5 | 87 |
| 6 | 151 |
| 7 | 231 |
| 8 | 103 |
| 9 | 167 |
8-6. 红外线遥控
学习目标:使用红外线遥控器指挥小车前进或后退。
程序效果展示:红外线遥控器的2、4、6、8共4个按键遥控小车前进、左转、右转、后退。
Mind+ 图形化程序截图:

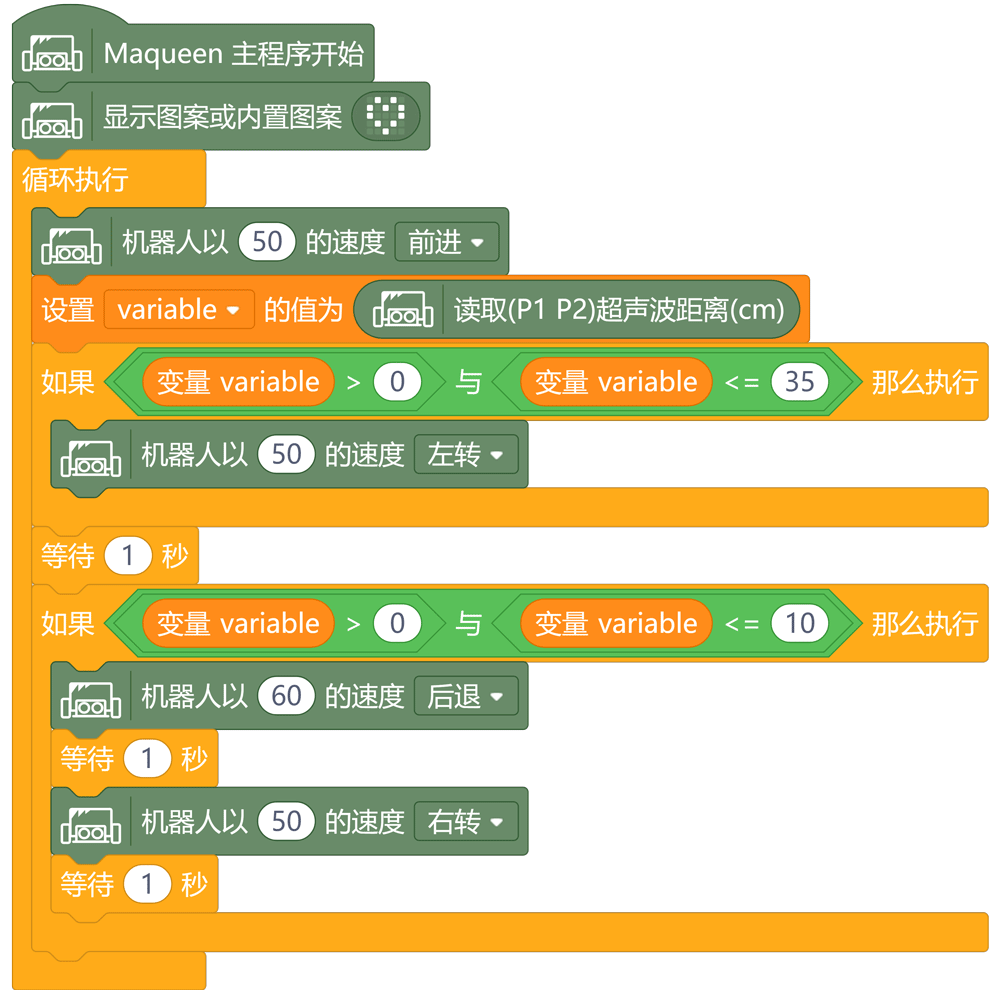
8-7. 超声波避障
学习目标:学习使用超声波躲避障碍物。
程序效果展示:当麦昆与障碍物的距离<=35cm时,左转,当距离<=10cm时,后退在右转。
Mind+ 图形化程序截图
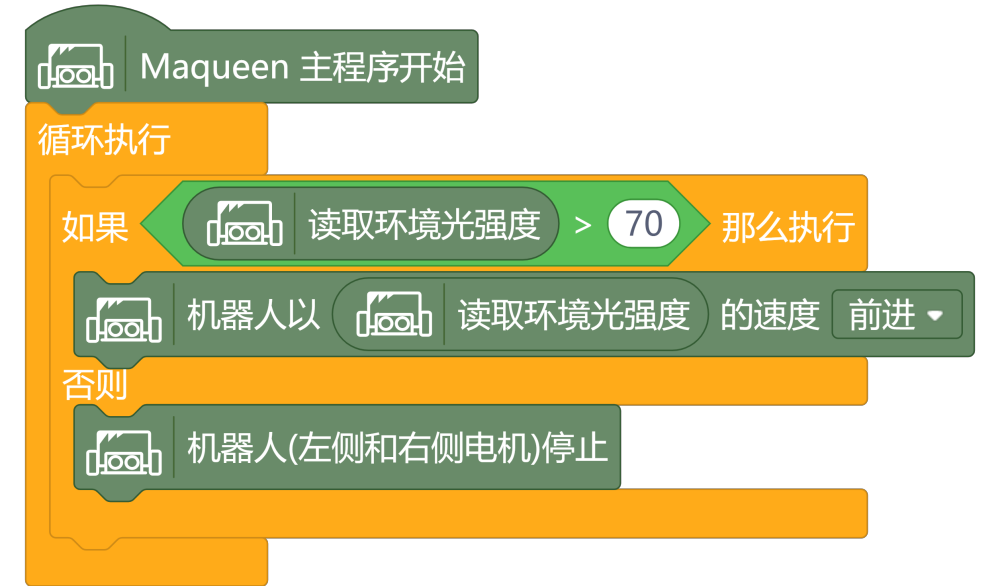
8-8. 光控精灵
学习目标:学习使用micro:bit主控板上的光线传感器。
程序效果展示:小车在光线较暗的地方不动,当手电筒照射LED的时候,随着光线强度的增加,车辆的前进速度也开始增加。
Mind+ 图形化程序截图
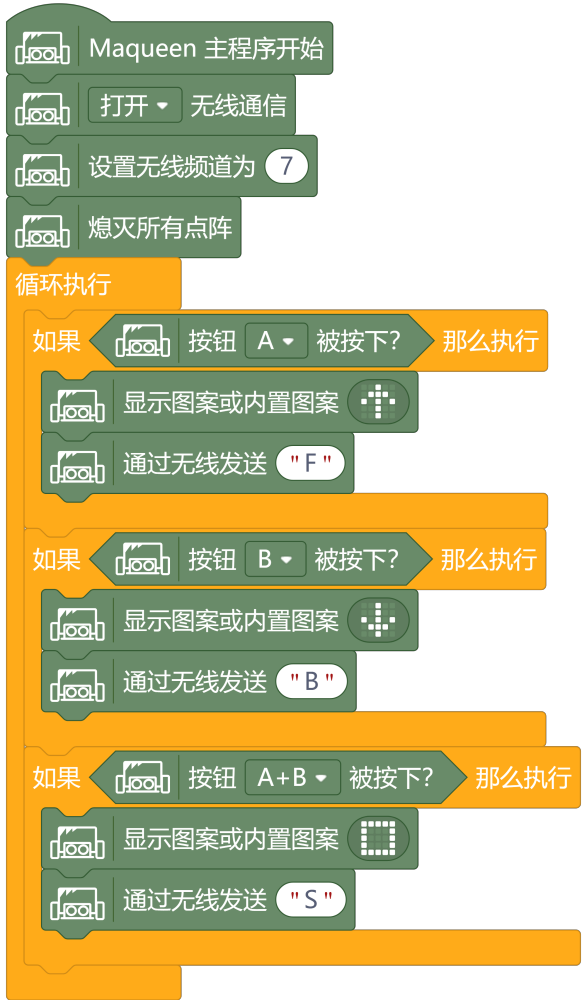
8-9. 无线发送
学习目标:学习使用两个micro:bit主板互相通信,发送信号。
程序效果展示:用一块micro:bit主板控制maqueen向前,向后,停止等动作。
Mind+ 图形化程序截图
8-10. 无线接收
学习目标:学习使用两个micro:bit主板互相通信,接受信号。
程序效果展示:用一块micro:bit主板控制maqueen向前,向后,停止等动作。
Mind+ 图形化程序截图

9. makecode编程实例
9-1. 导入makecode图形化库
第一步:点击链接:makecode.microbit.org 进入makecode图形化在线编程平台 (注:第一次加载会比较慢,请耐心等待)
第二步:MakeCode扩展中搜索“dfrobot”然后选择“Maqueen”
第三步:MakeCode扩展中粘贴网址:https://github.com/DFRobot/pxt-maqueen
按下图步骤导入库

makecode控制麦昆代码
9-2. 控制电机模块
学习目标:掌握Maqueen的电机控制基本方法
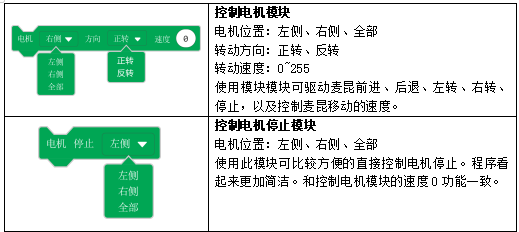
示例程序效果展示:小车前进1秒,右转1秒,左转1秒,后退1秒,后退并右转1秒。

makecode程序链接:https://makecode.microbit.org/_gKTKJYKH4TH5
makecode图形化程序截图

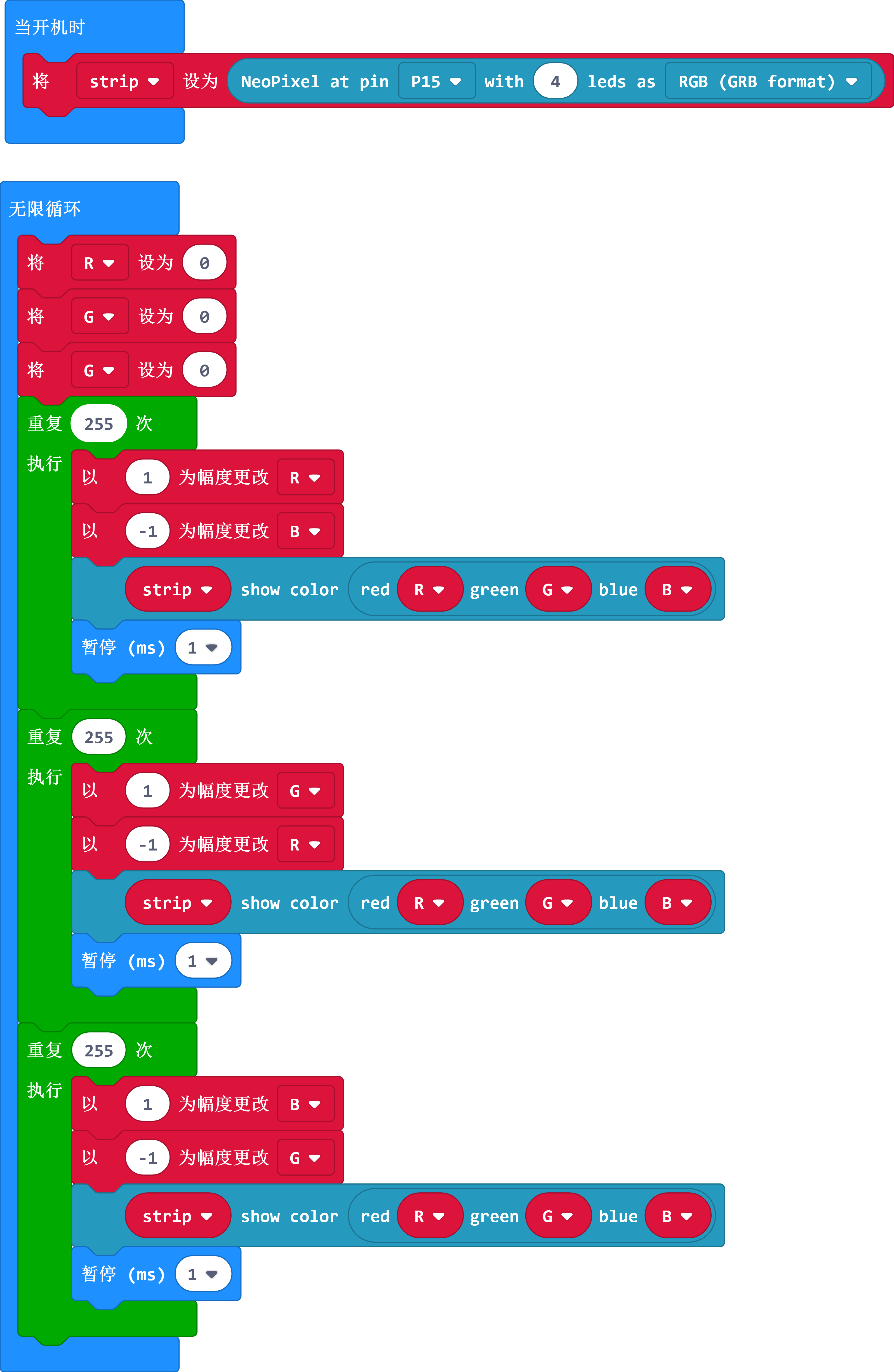
9-3. RGB彩色呼吸氛围灯
学习目标:了解RGB氛围灯的基本使用方法
示例程序效果展示:底部RGB氛围灯红、绿、蓝三色混合渐变显示出多种颜色,呈现出彩色呼吸效果。

本例程需分额外加载灯带库,加载方法:设置 - 扩展 - neopixel 。
如图:
makecode程序链接:https://makecode.microbit.org/_0cKbTrMsyLac
makecode图形化程序截图
9-4. LED车灯闪烁
学习目标:了解LED车灯基本使用方法。

示例程序效果展示:麦昆前方的左右两个车灯按0.5秒的频率左右交替闪烁。并且,蜂鸣器随着闪烁频率发出不同的音调。

makecode程序链接:https://makecode.microbit.org/_5AuHAMPPmD28
makecode图形化程序截图

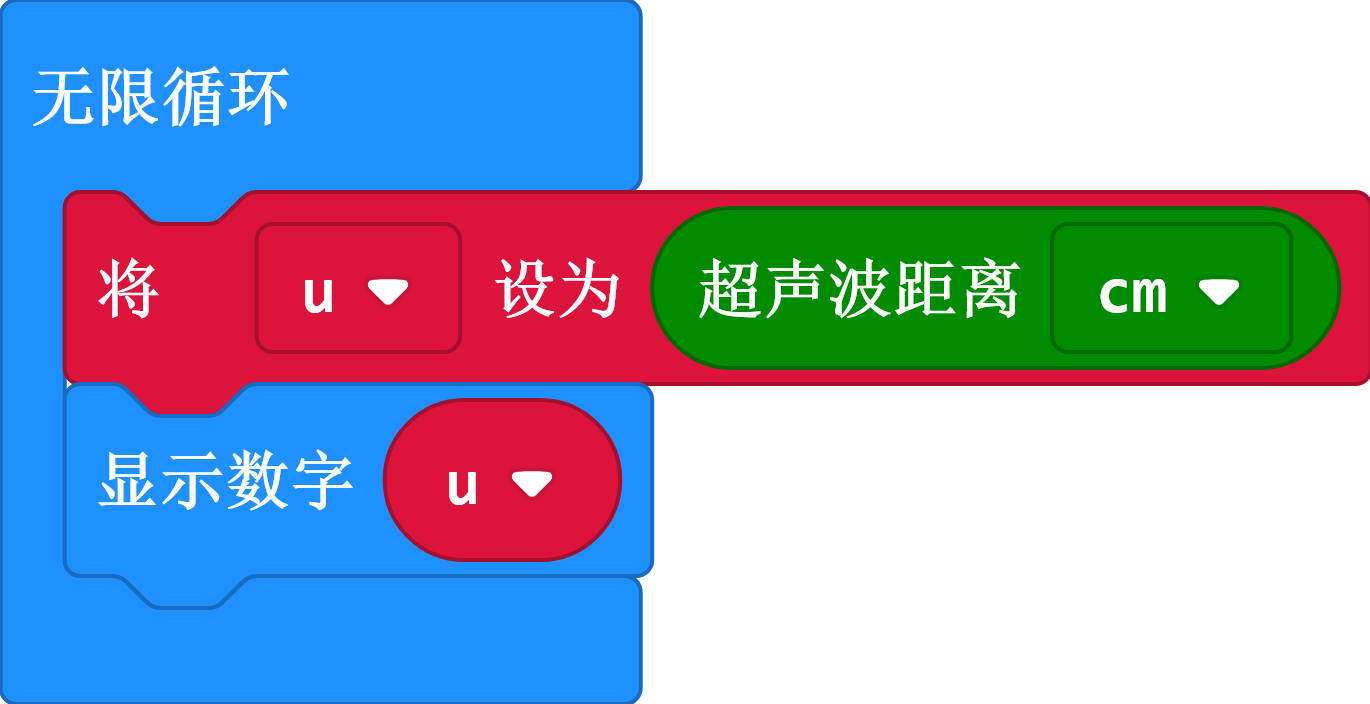
9-5. 读取超声波距离值
学习目标:学会读取超声波的距离,以便后期可以灵活的使用这些数据。
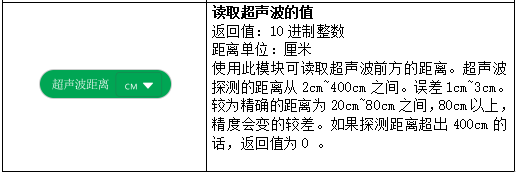
示例程序效果展示:超声波检测前方不同距离的障碍物,并将距离显示在点阵屏上,单位为厘米。

makecode程序链接:https://makecode.microbit.org/_ihJE33RVaUc0
makecode图形化程序截图
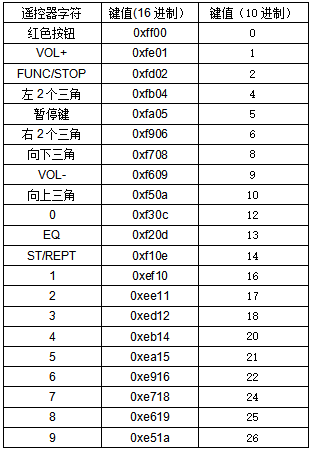
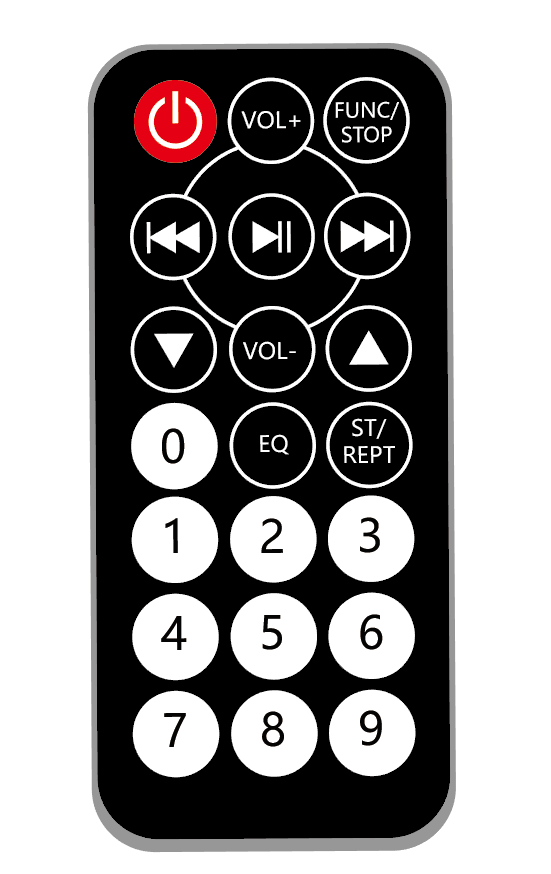
9-6. 读取红外线键值
学习目标:学会红外遥控器的键值,以便后期可以灵活的使用这些数据。

示例程序效果展示:用红外线遥控器对着红外接收管按任意键,点阵屏上对应显示当前按下按键的键值,十进制方式显示键值的最后两位。

makecode程序链接:https://makecode.microbit.org/_UV9W1vRPP4tW
makecode图形化程序截图

红外遥控器及其键值:
下表中的键值是16进制,在本产品中,我们读取红外编码的最后两位,并自动转换为10进制数据。
9-7.红外遥控
学习目标:学会通过红外线遥控器控制小车。

示例程序效果展示:用红外线遥控器的2、8、4、6、5按键分别遥控麦昆前进、后退、左转、右转、停止。

makecode程序链接:https://makecode.microbit.org/_MMbLtx05ARxx
makecode图形化程序截图

9-8. 读取巡线传感器
学习目标:学会读取巡线传感器返回值。
示例程序效果:将巡线传感器放在黑线上,输出信号0,并且在microbit点阵上显示数字0,如果巡线传感器放在白色区域上,输出信号1,并且在microbit点阵上显示数字1 。
程序链接:https://makecode.microbit.org/_LbsPh6W86Ybc
makecode图形化程序截图
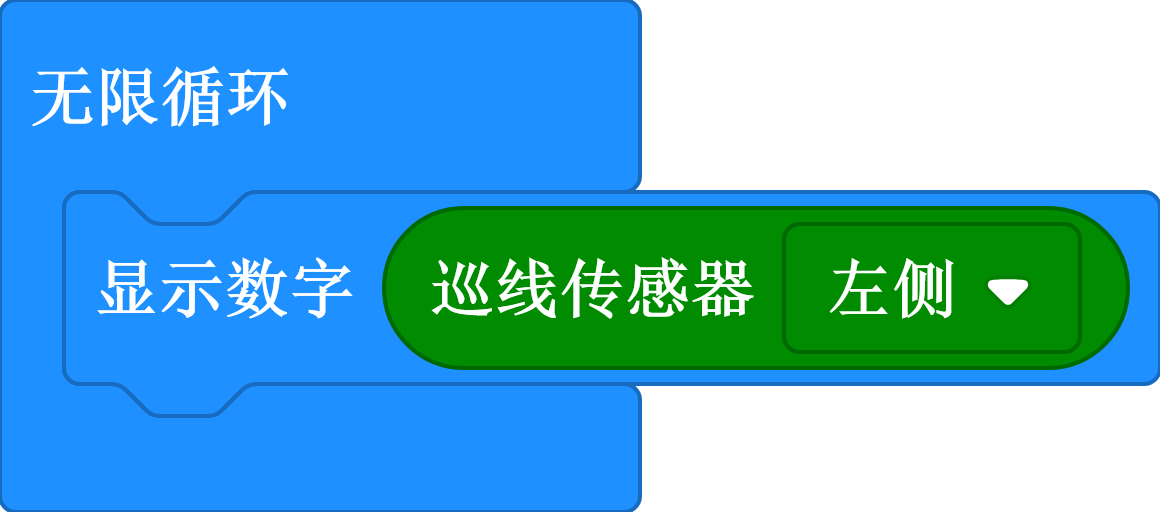
9-9. 巡线行驶
学习目标:学会让小车在黑线上行驶。
示例程序效果展示:小车沿着黑色线条行驶(黑线宽度和绝缘胶带宽度近似)

makecode程序链接:https://makecode.microbit.org/_hc1Up1eekFWA
makecode图形化程序截图
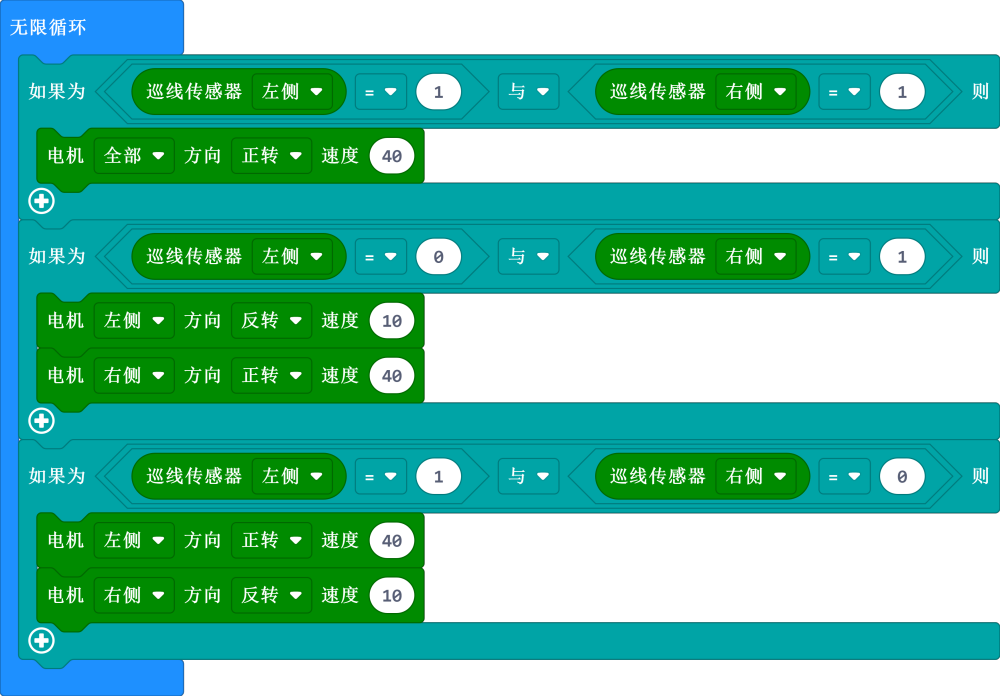
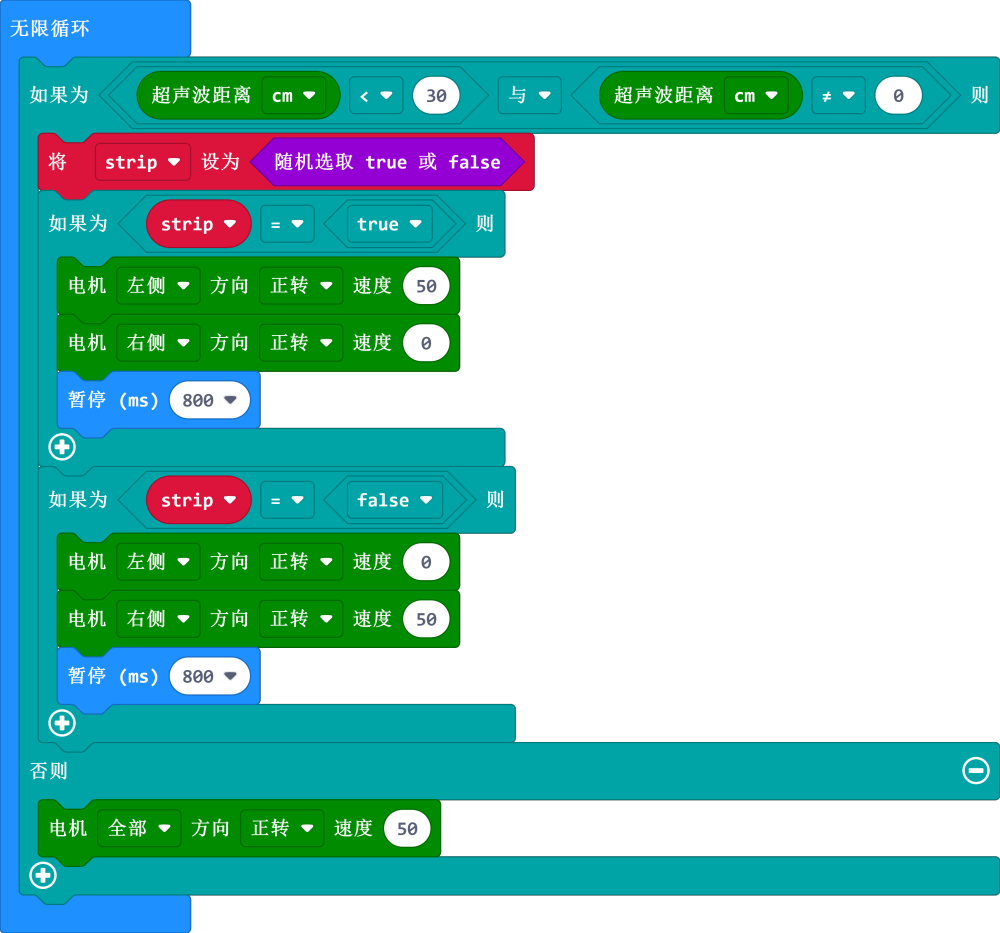
9-10. 超声波避障
学习目标:学会让小车避开障碍物行驶。
示例程序效果展示:开机小车前进,超声波检测前方距离,如果距离小于30cm,小车随机选择左转或者右转,避开障碍物。
配件准备:SR04超声波模块×1或者SR04-P超声波模块,插入前方的SR04接口。

makecode程序链接:https://makecode.microbit.org/_V0yFaqJ4EEkD
makecode图形化程序截图
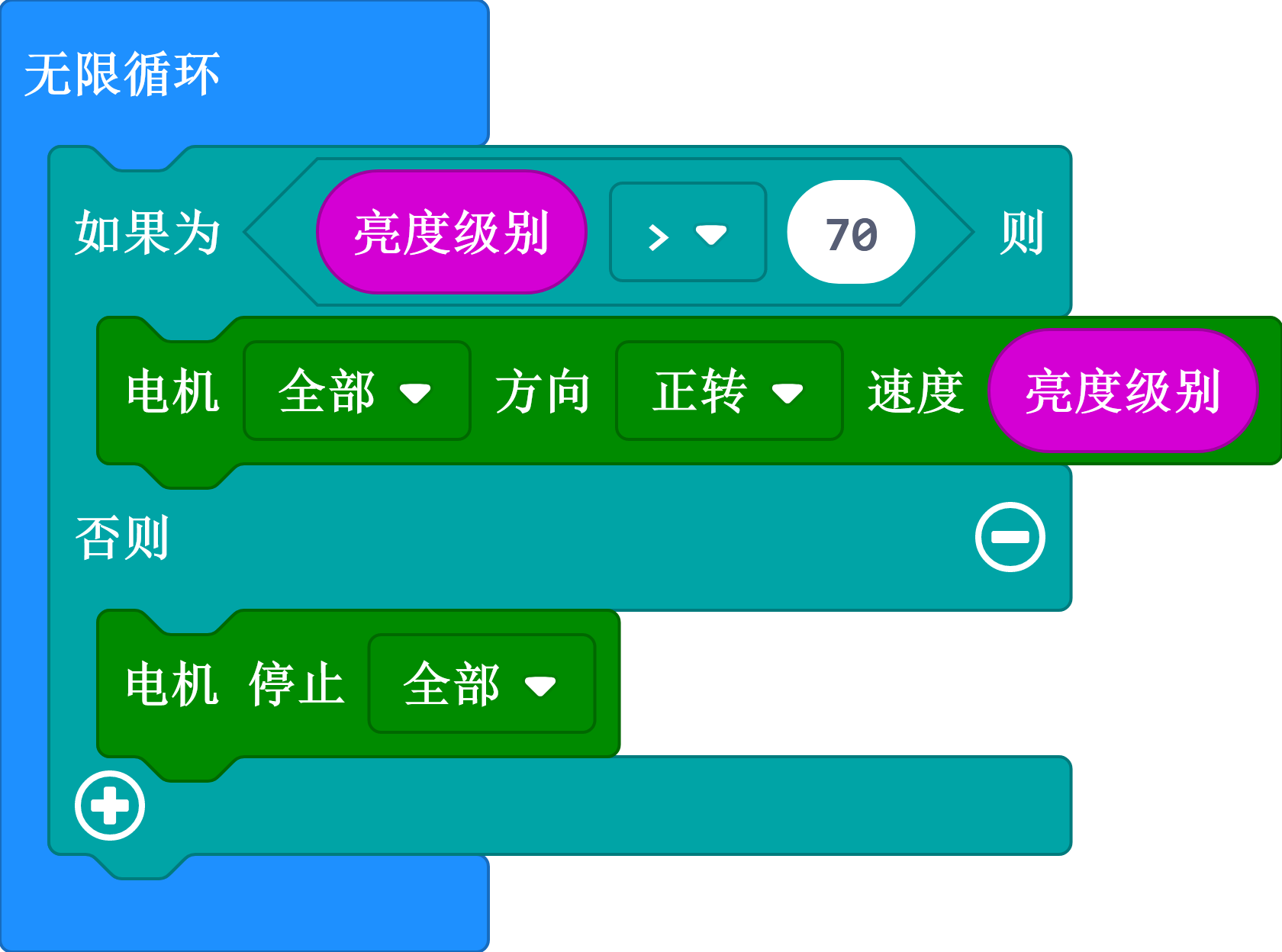
9-11. 光控精灵
学习目标:学会让小车跟着光线走。
程序效果展示:用手机的手电筒灯光照射microbit主板上的LED点阵,麦昆即可前进行驶。并且,亮度越大,麦昆行驶的越快。

makecode程序链接:https://makecode.microbit.org/_83R1r97Kob5c
makecode图形化程序截图
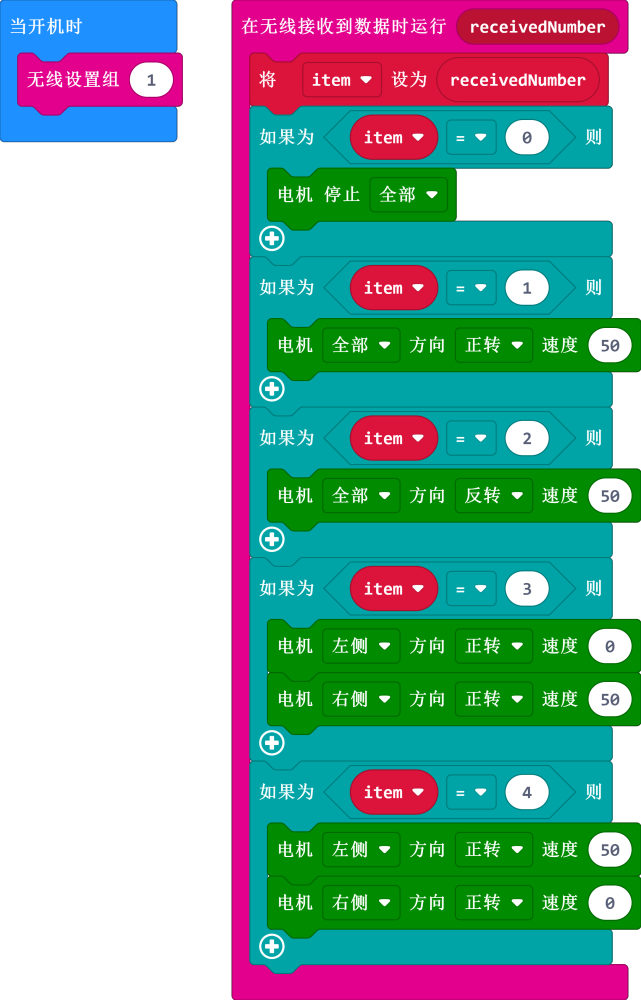
9-12. microbit手柄遥控麦昆
学习目标:学会使用microbit的无线功能
示例程序效果展示:使用microbit手柄摇杆控制小车前后左右运动。
首先需要加载遥控手柄的库链接:https://github.com/DFRobot/pxt-gamePad
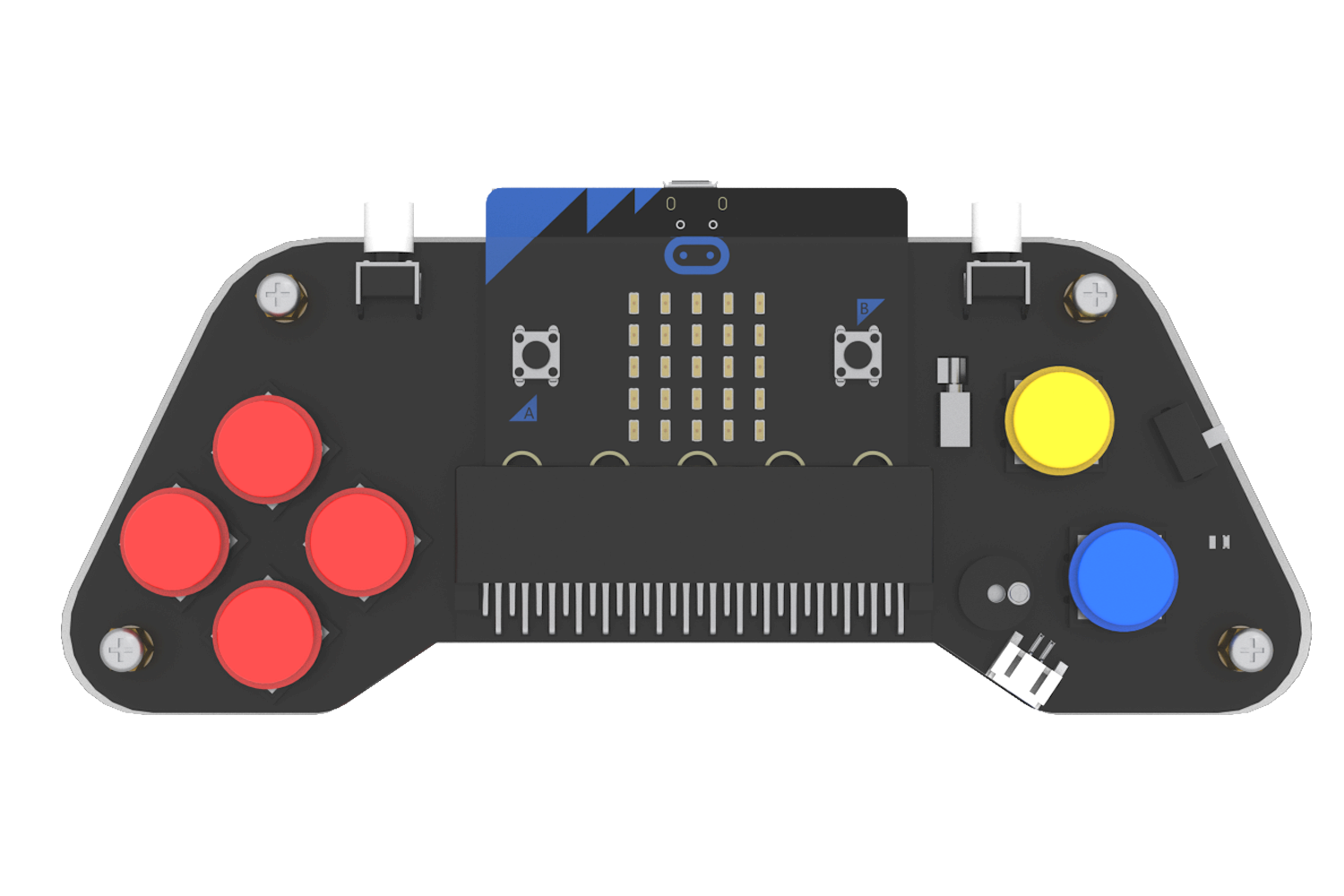

本例程中,我们通过程序将模拟摇杆设置为开关量,用于控制小车前进,后退,左转,右转。
小车端程序链接:
https://makecode.microbit.org/_iHi2Ra1PvVWz
手柄端程序链接:
https://makecode.microbit.org/_4cHaJWYKDgCP
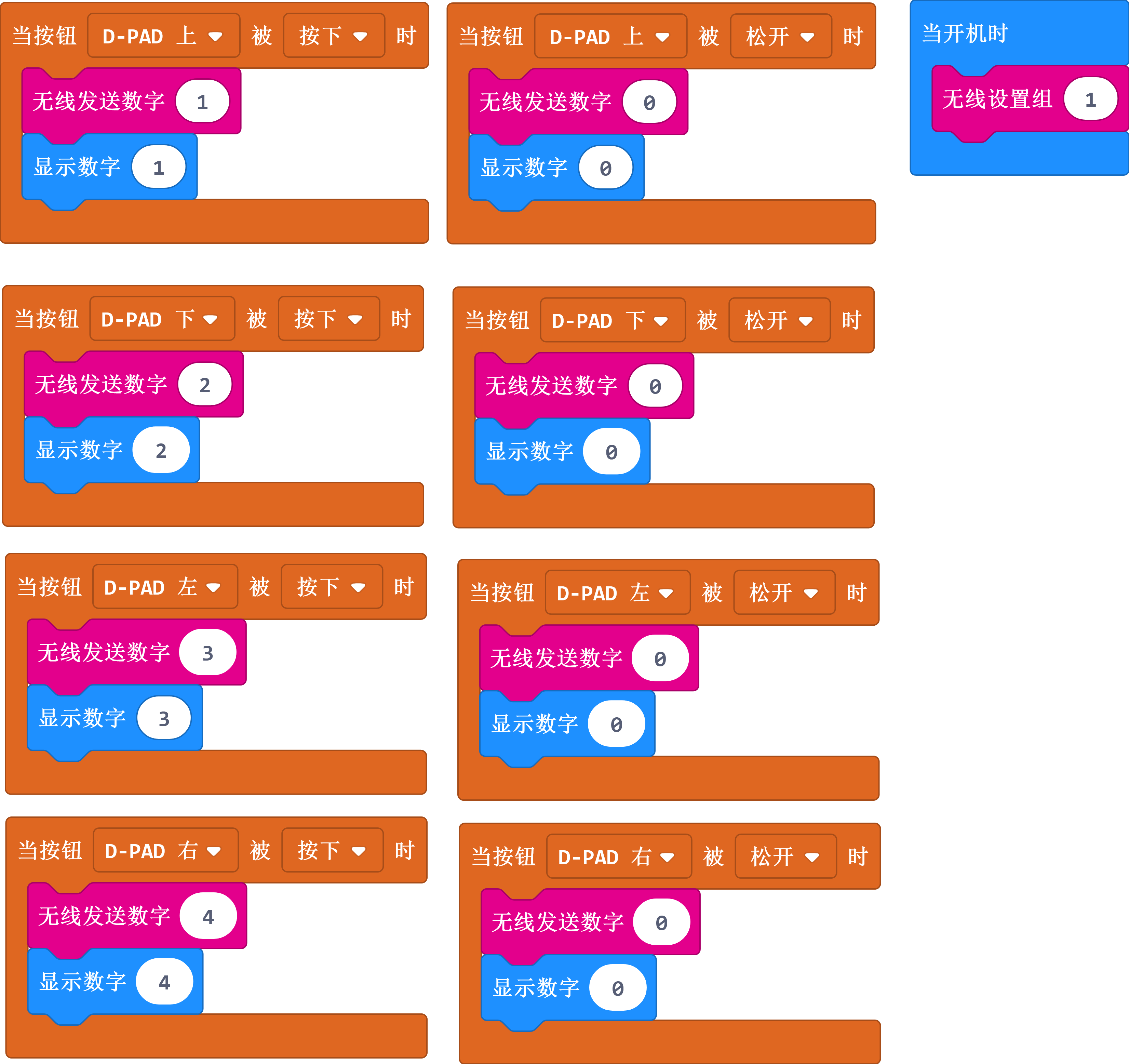
运行效果
运行程序,拨动摇杆,麦昆Lite执行方式如下:

9-13. 舵机驱动
学习目标:学会如何控制舵机。
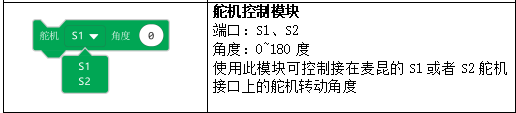
示例程序效果展示:S1和S2舵机从0度到180度转动,再从150度回到0度,循环执行。
配件准备:在舵机接口S1和S2正确插入9g舵机(麦昆支持9g普通舵机及金属舵机)。
makecode程序链接:https://makecode.microbit.org/_JbAfTMTkzcMR
makecode图形化程序截图

9-14. 读取产品信息
学习目标:学会读取产品信息。
程序效果展示:在microbit点阵上显示读取到的麦昆产品信息。
简体中文版显示:ROB0148-CN
繁体中文版显示:ROB0148-TW
英文版显示:ROB0148-EN
韩国版显示:ROB0148-KR
日本版显示:ROB148-JP
makecode程序链接:https://makecode.microbit.org/_YAebP1f7pdsi
makecode图形化程序截图


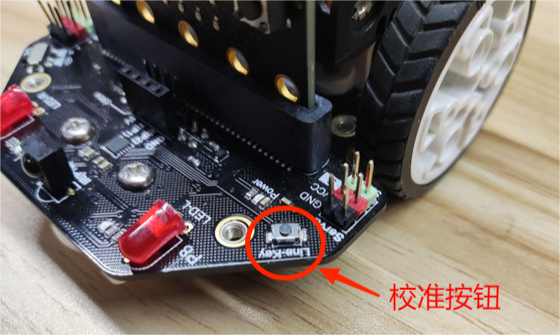
10. 巡线传感器校准方法
巡线传感器在出厂的时候已经校准好了,你无需再次校准。校准按钮就像数码产品的复位按钮一样,你绝大多数情况下都不需要使用到。不正确的校准方法也会导致巡线传感器失效。
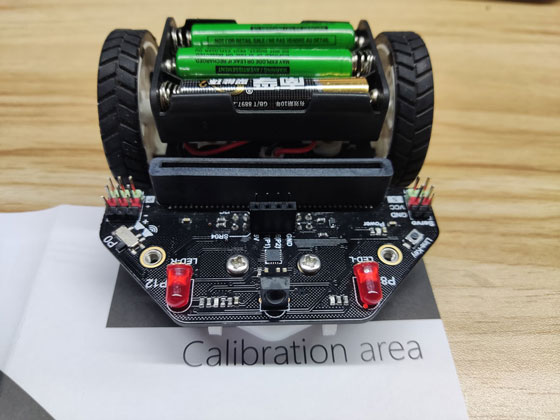
如果你发现巡线传感器不能识别原来能正常识别的黑色线条,那么你可以尝试校准。方法如下:
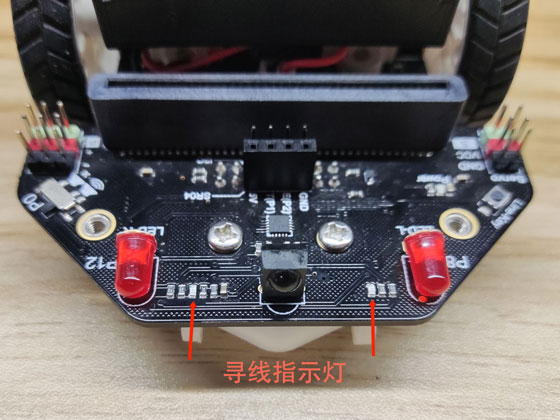
1、将小车放在产品配送的地图黑色块上,并确保左右两侧寻线传感器都在黑色区域内。如图所示:
2、长按约1秒钟校准按钮,此时,两个蓝色LED寻线指示灯闪烁,结束后校准完成。
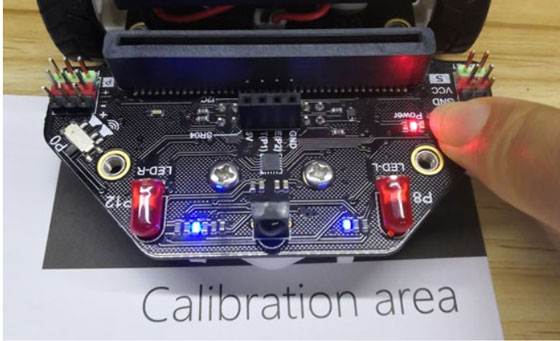
3、检查校准结果:校准完成后,将巡线传感器放到白色区域,两个寻线指示灯亮;放在黑色区域,指示灯灭,说明校准是正确的。
疑难解答
1. 上传不成功?
上传到设备时需要将代码窗口切换到“自动生成”窗口

2. 测试超声波出现0值
测试壁障要加一个约束条件,距离不为0的时候,距离小于5的都过滤掉
也可以尝试加100毫秒的delay,防止收到多次反射
3.给小车装上电池,车上的power灯能够亮起,烧录程序无法控制电机转动?
电池没电导致,建议更换电量充足的电池。电池电压低于2V时,板子上的LED及其他功能是可以正常工作的,但是电机会由于电量不足无法转动。
