一、简介
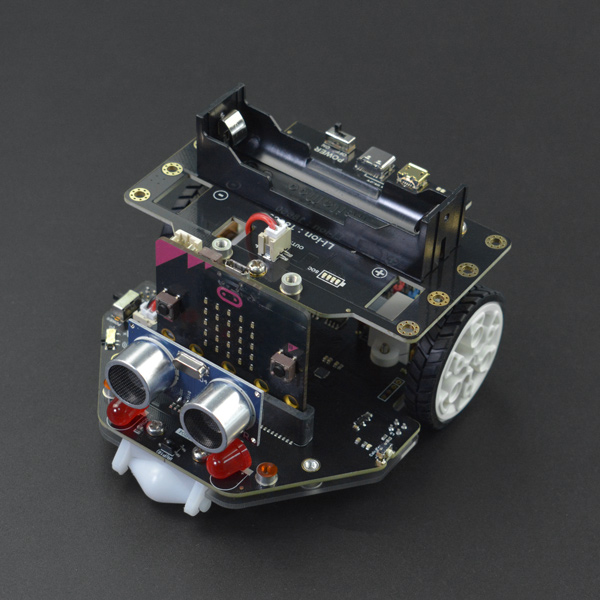
这是麦昆plus的最新版本。用于中小学STEAM机器人教学。本产品具有丰富的扩展接口(14路扩展口+顶部模块安装孔),充足的电力供应(4节镍氢充电电池和18650电池可选),宽大的机身。所以,它能够支持更多的周边扩展,包括哈士奇AI摄像头、麦昆工程队等。用户可灵活的用于课堂教学以及课后实践。
并且,麦昆plus继承了麦昆Lite的所有功能。无论是否是使用过麦昆的老师,麦昆plus都非常容易上手。但它又比麦昆Lite的功能更加丰富和灵活。
二、产品参数
- 供电方式:1.5V AA碱性电池×4 或 1.2V AA镍氢电池×4 或 18650可充电电池(18650电池版本)
- 18650版本板载充电电路,MicroUSB及TYPEC充电接口,充电时间4小时,使用时间约15小时。
- 支持micro:bit V1和V2主板
- 2路133转N20金属电机
- 1路蜂鸣器
- 3路5V IO口(P0 P1 P2)
- 8路3.3V IO口(P0 P1 P2 P8 P12 P13 P14 P15 )
- 2组3.3V I2C接口
- 1组5V I2C接口
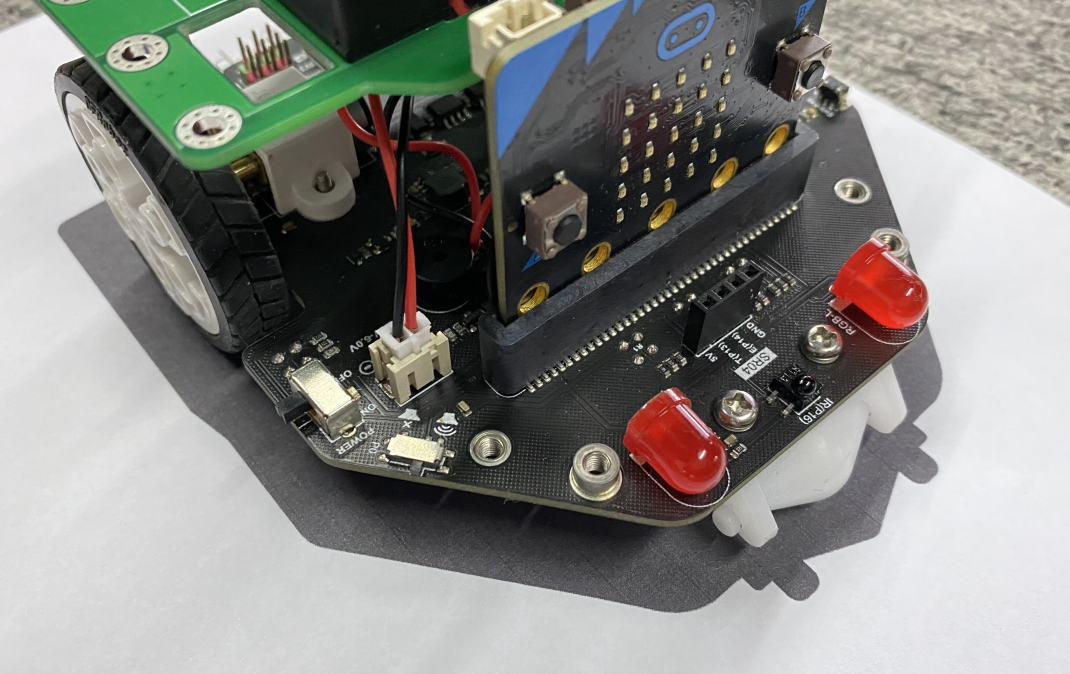
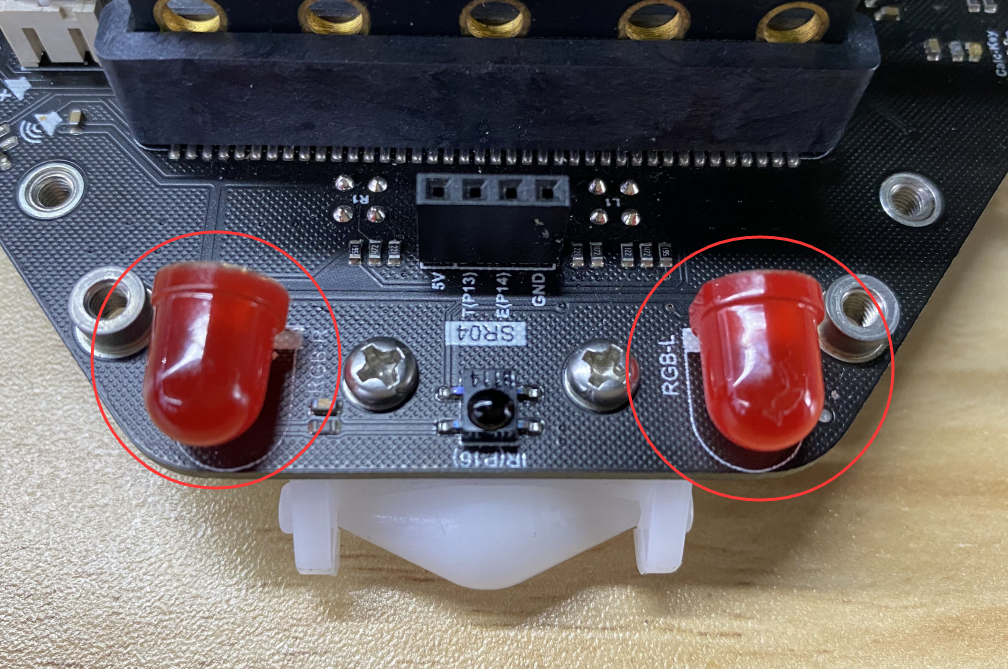
- 2路大号LED车灯
- 4路RGB氛围灯
- 5路巡线传感器
- 巡线一键校准
- 巡线传感器灰度值读取
- 1路红外接收传感器
- SRO4超声波模块
- 产品尺寸:136mm×65mm
- 编程平台:Mind+、makecode图形化编程
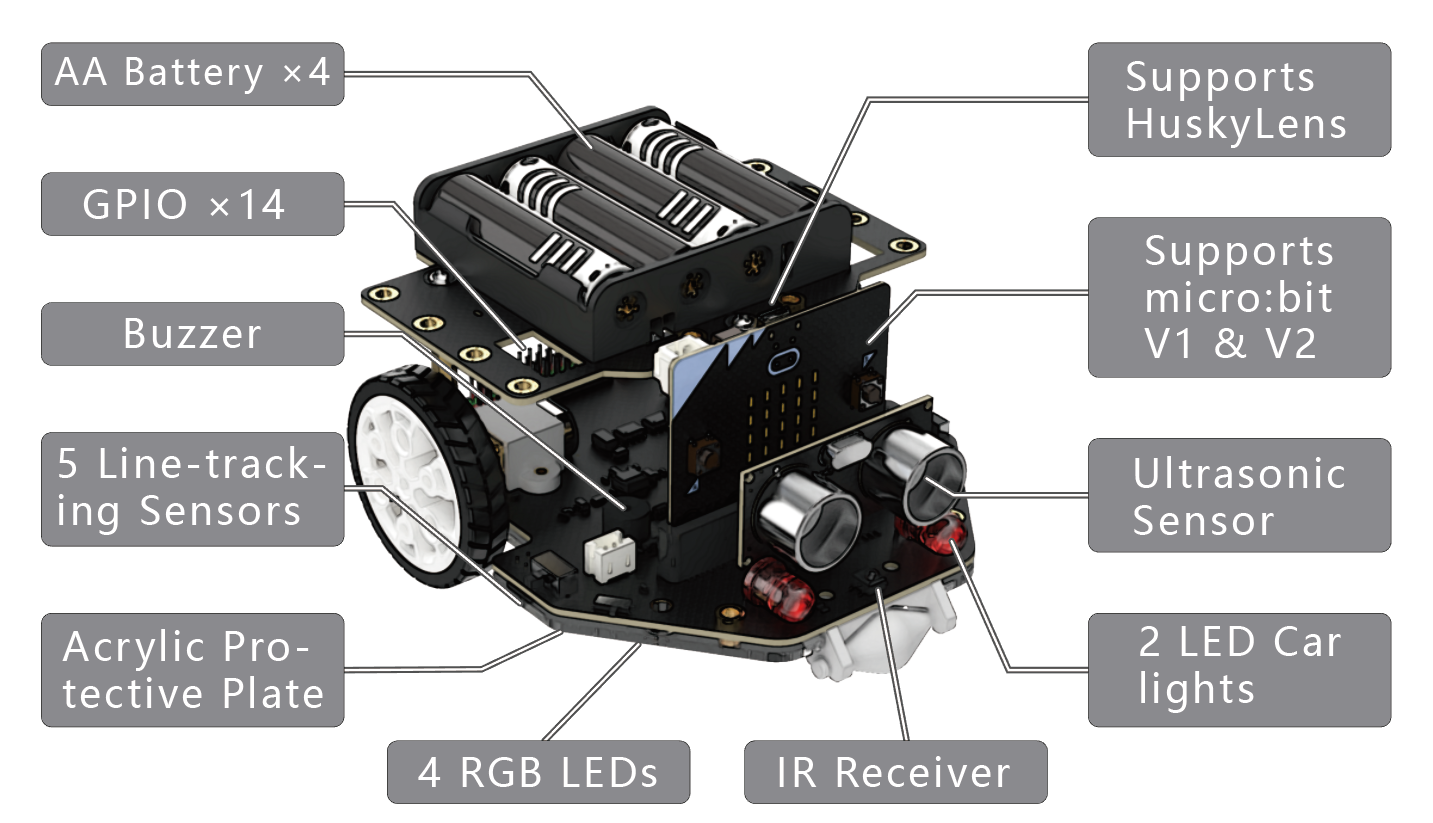
三、功能指示图
AA电池版本:
18650电池版本:

四、电池使用方法及充电方法
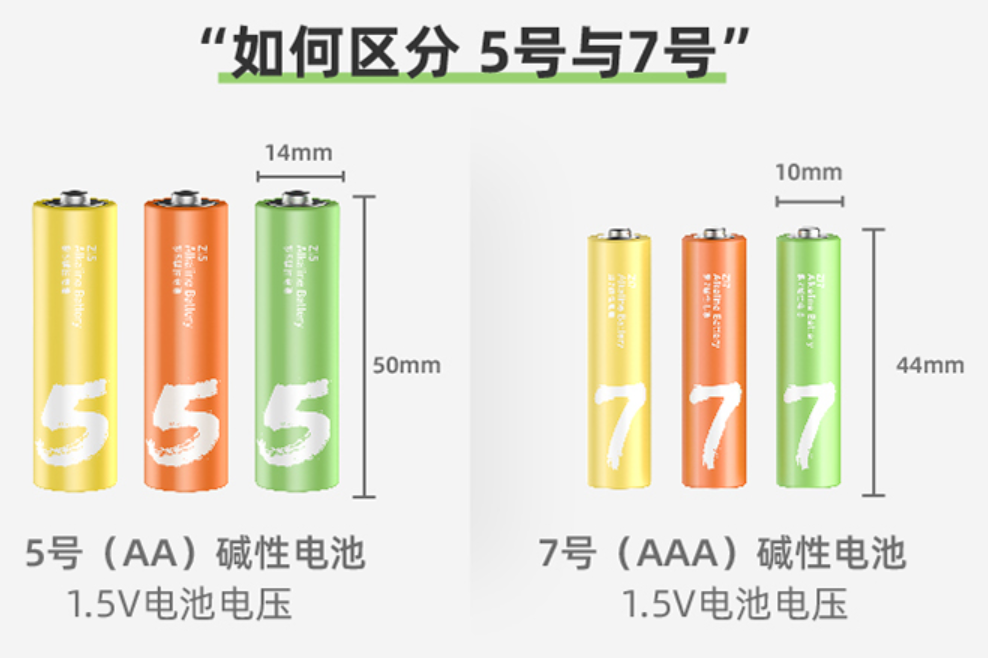
4-1.AA电池使用方法:
如果你购买的是AA电池版本的麦昆PlusV2,那么它是支持1.5V的5号(AA)电池和1.2V镍氢充电5号(AA)电池两种规格电池的。购买电池的时候,请注意不要购买成7号(AAA)电池。AA电池在大多数超市均可购买到。需要注意的是,1.5V的碱性电池为一次性电池,不可对其充电,否则可能会发生爆炸或者起火。
镍氢充电电池是一种比锂电池更安全,不易发生爆炸起火的充电电池,电压为1.2V每节。镍氢电池的尺寸和AA碱性电池一样,麦昆Plus考虑到万一用户误对碱性电池进行充电造成危险,所以没有设计板载充电电路。所以,如果需要使用镍氢电池,你需要购买镍氢充电电池和充电器套装。
推荐购买链接:
https://detail.tmall.com/item.htm?id=523725647695&ali_refid=a3_430582_1006:1106679608:N:FJfpzaQMWgMK+w2VICAjCexa77ah0hPj:8e75d388b0a5abd72c4240aa7c4ca673&ali_trackid=1_8e75d388b0a5abd72c4240aa7c4ca673&spm=a230r.1.14.6&skuId=4418633335447

注:不论使用何种AA电池,安装的时候均需要注意电池的正负极和电池盒上对应,不可装反。
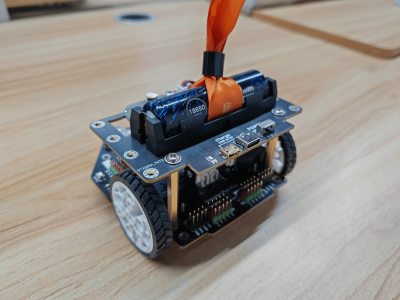
4-2.18650电池插拔方法:
如果你购买的是18650电池版本的麦昆PlusV2,那么可以用附带的电池易拉带将电池包裹住。

将电池板断电,关闭开关,按照对应的正负极将电池放置到电池盒中就可以使用了。如果需要将电池取下,可以手握包裹电池的易拉带将电池拔出。
注:禁止使用螺丝刀、镊子等金属工具从电池盒中撬起18650电池。在安装电池时需注意正负极方向,拔出电池时电池板需断电。
五、快速上手指南
5-1.安装好电池。(如图)

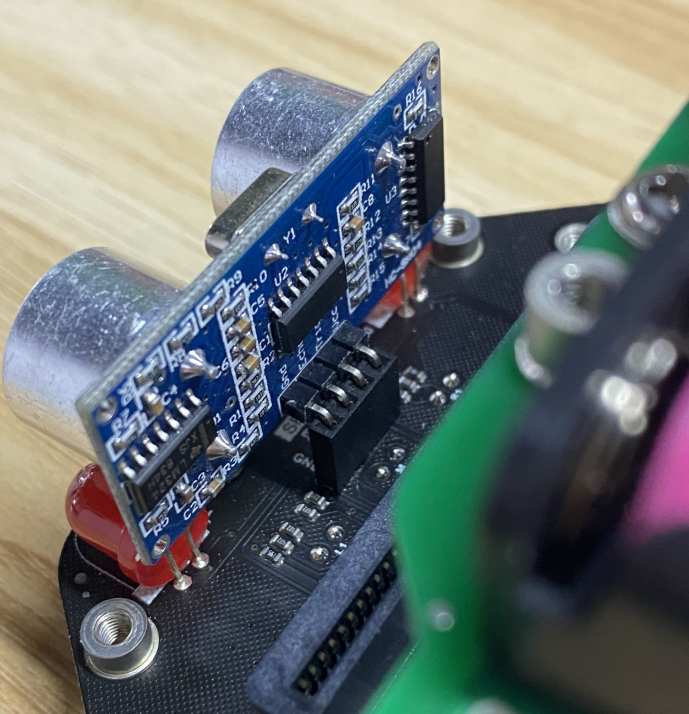
5-2.插上超声波传感器(如图)
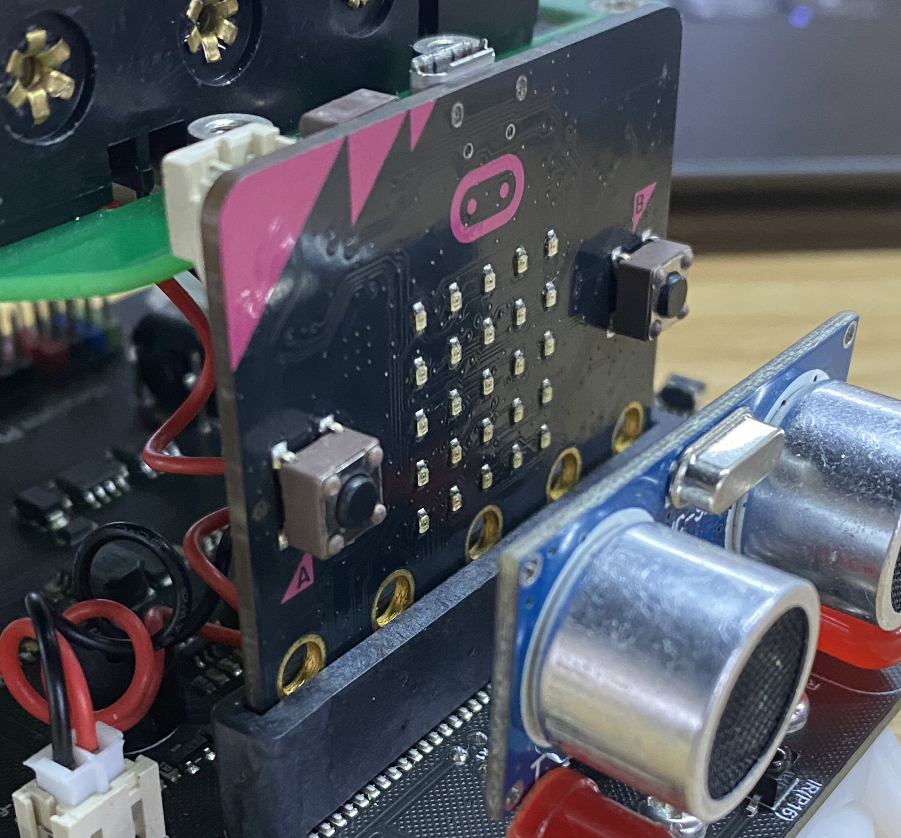
5-3.将microbit主板插入插槽(如图)
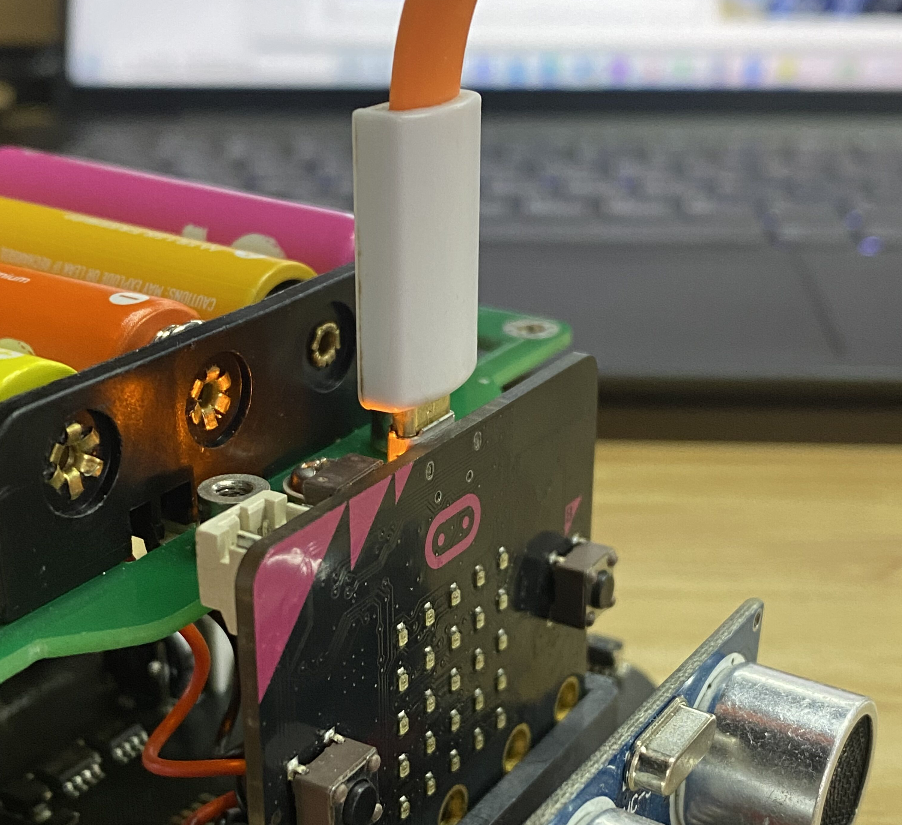
5-4.将USB线插在主板上,并连接电脑的USB口(如图)
5-5.点击示例程序链接,在打开的页面选择 “编辑” 。(如图)
示例程序:https://makecode.microbit.org/_e7rYAPAUMUV8

5-6.拔掉USB线,并打开电源开关(如图)

经过以上的操作,我们把一个自动避障机器人的程序下载到了主板上。将麦昆Plus放在地上,它会自动往前开,并且自动检测前方30cm内是否有障碍物,如果有障碍物的话,麦昆Plus会自动转弯避开障碍物继续行驶。
六、MakeCode图形化编程
-
MakeCode基础教程:点击进入makecode在线图形化编程基础操作教程
-
MakeCode库地址:https://github.com/DFRobot/pxt-DFRobot_MaqueenPlus_v20
-
如何添加库:
http://wiki.dfrobot.com.cn/index.php?title=MakeCode%E5%9C%A8%E7%BA%BF%E5%9B%BE%E5%BD%A2%E5%8C%96%E7%BC%96%E7%A8%8B%E5%9F%BA%E7%A1%80%E6%93%8D%E4%BD%9C%E6%95%99%E7%A8%8B
6-1. 光控麦昆Plus
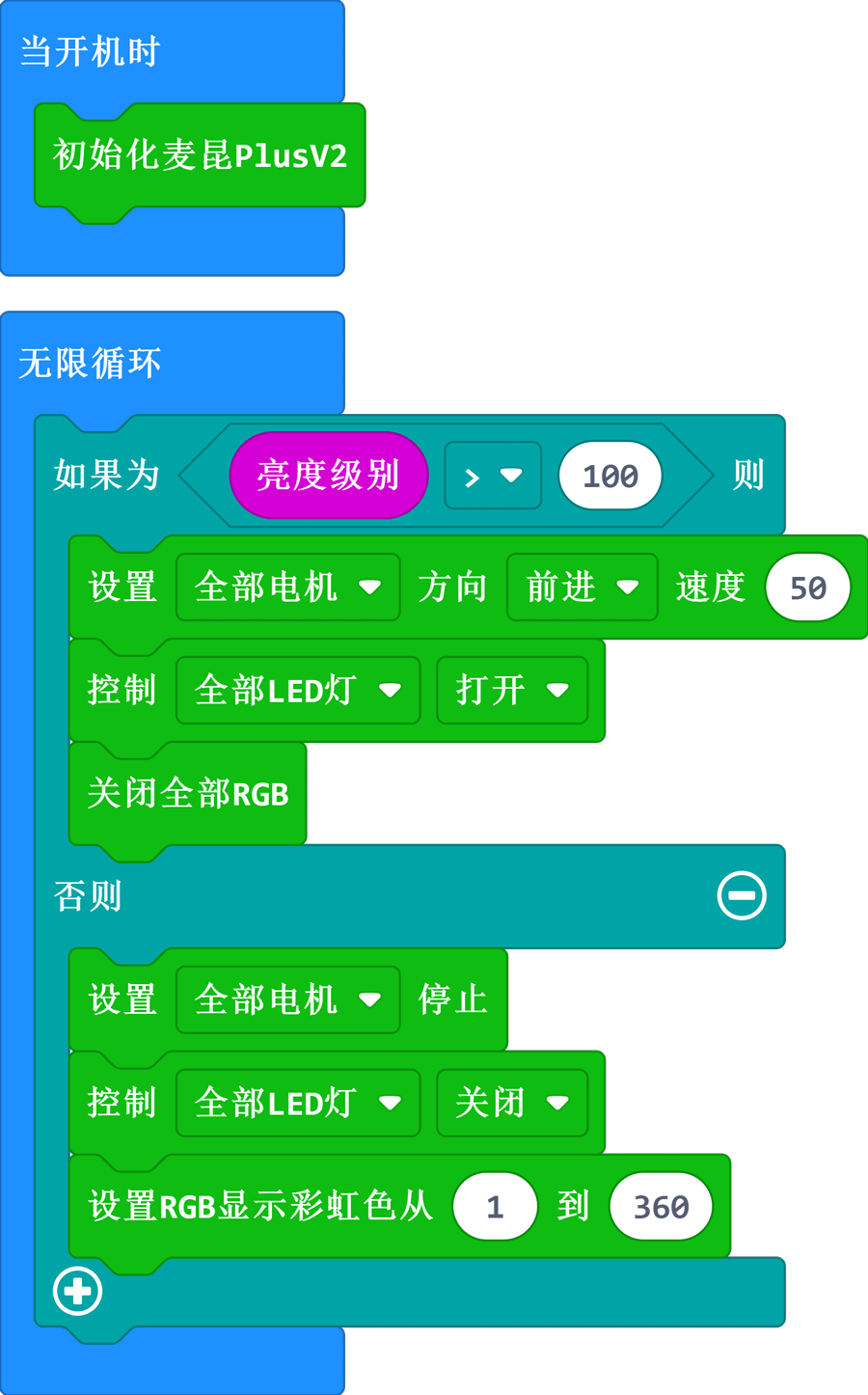
以下程序调用了microbit主板的光线传感器。平时,小车处于停止状态,底部的RGB灯亮起彩色。当用手电筒照射microbit主板正面的时候,底部的小车往前行驶,底部RGB灯熄灭,前灯打开。
光线传感器的值是一个0~255之间的模拟量。用来表示光线的强度大小。在程序中,我们取了一个100的光线强度值作为分界点,当光线强度大于100的时候,就启动小车,反之则让小车停止。
程序链接:https://makecode.microbit.org/_Wue51de0tKyU
程序截图:
6-2. 声控麦昆Plus(该例程仅支持板载声音传感器的V2主板)
以下程序调用了microbitV2主板板载的声音传感器,当拍手掌的时候,小车开始行驶,并打开车灯,当再次拍手掌的时候,小车停止,关闭车灯。如此循环检测掌声。
在程序中,当检测到声音大于100的时候,就将一个布尔值的状态反转。接着,程序检测布尔值是否为真,如果为真的话,小车前进,如果为假的话,小车停止。
程序链接:https://makecode.microbit.org/_hcsETx7EyV5C
程序截图:

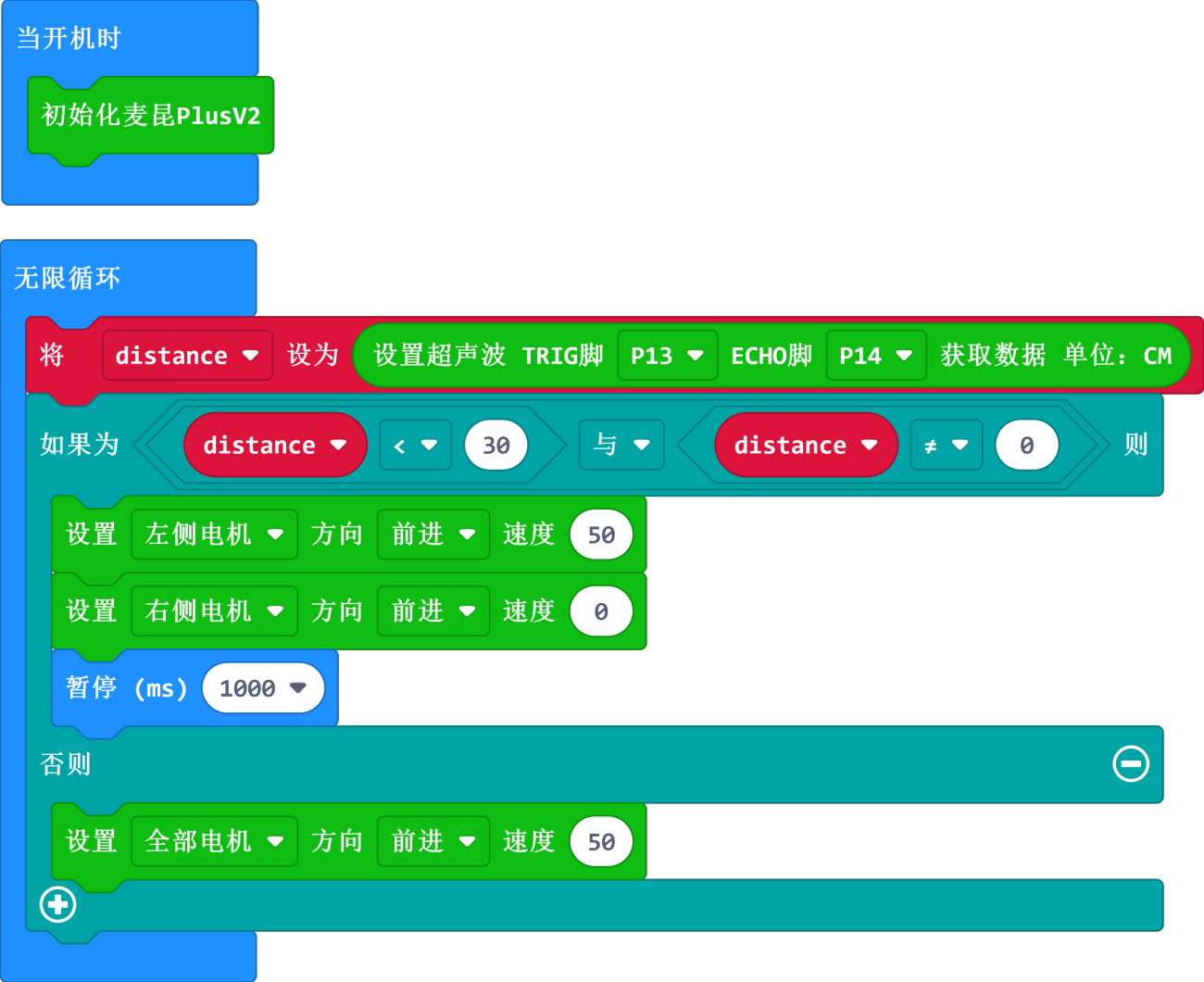
6-3. 超声波避障机器人
以下程序实现的功能是:麦昆Plus在行驶的过程中,检测前方是否有障碍物。如果发现前方30cm左右有障碍物的话,就转弯避开障碍物继续行驶。
程序中,把超声波读取到的距离赋值给一个变量,然后判断这个变量的值如果小于30的话,就执行转弯一秒钟的动作。当转弯一秒后,会继续检测距离是否小于30cm,如果前方30cm没有了障碍物的话,小车就直行前进。
程序链接:https://makecode.microbit.org/_fs8aEXFeEVY8
程序截图:
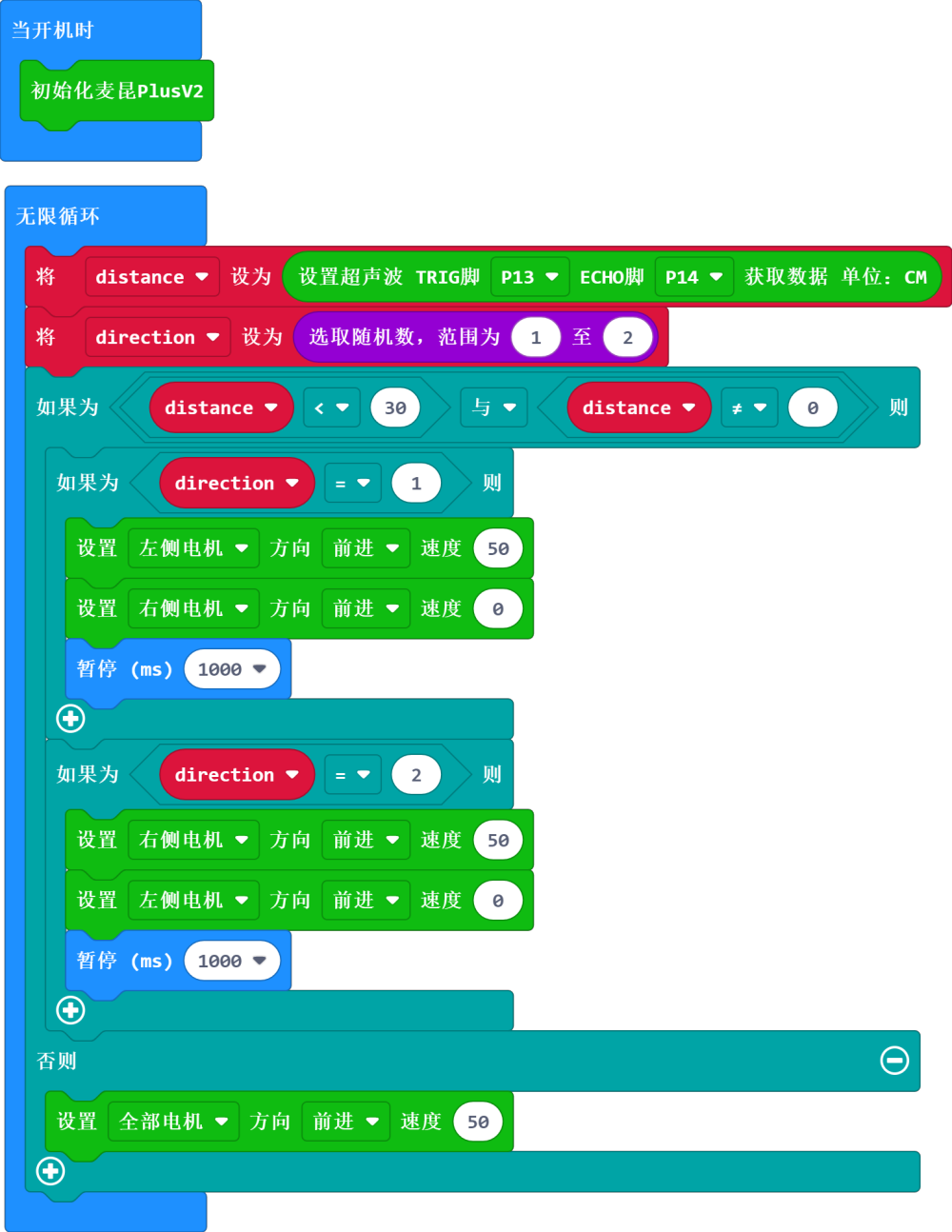
以上程序执行后,你会发现,小车遇到障碍物后永远是朝着一个方向转弯的。下面我们将程序改进以下,让小车遇到障碍物随机选择一个转弯的方向继续行驶。
在程序中使用了随机生成整数的模块,随机生产1或者2,如果是判断随机数是1的话,就右转,如果随机数是2的话,就左转。
程序链接:https://makecode.microbit.org/_Uot1AJdwwbur
程序截图:
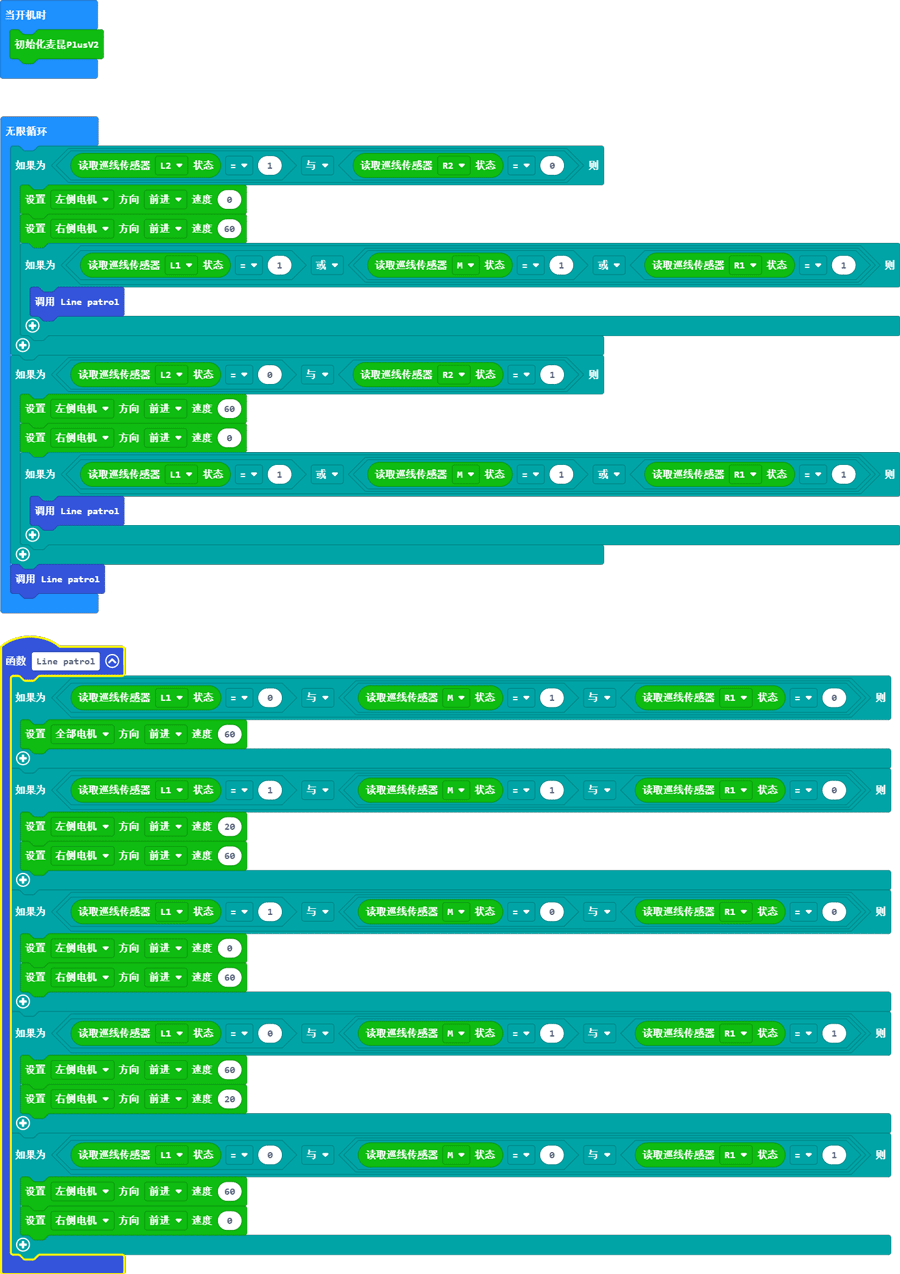
6-4. 巡线机器人
以下程序的功能是:将小车放到圆形的黑色线条地图上,小车会利用设置在底部的三个巡线传感器探头检测小车是否在黑色线条上行驶,如果偏离了黑色线条,小车会实时的纠正行驶方向,以便小车会一直沿着黑色线条行驶。
麦昆Plus V2一共有5个巡线传感器探头,在本程序中,使用了L1、R1、M这三个探头来检测黑色线条。L2和R2暂未使用。
当巡线探头检测到黑色线条的时候,输出值为1,检测到的是白色的时候,输出值为0 。利用这个特性,就可以使用三个巡线传感器来对黑色线条进行检测,利用多个探头的状态来实时判断黑色线条的位置和小车应该如果转弯纠偏。
程序链接:https://makecode.microbit.org/_KhA1VvMi70rp
程序截图:

在以上程序当中,我们并没有使用到最两边的L2和R2两个探头,小车如果失误开出去了就很难再返回来找黑线继续行驶。下面的程序,我们将使用五个探头,在左右两侧的最边上再增加一层检测,让小车发现走错后还能及时返回。
程序链接:
https://makecode.microbit.org/_WVc5uwLsq9xE
程序截图:
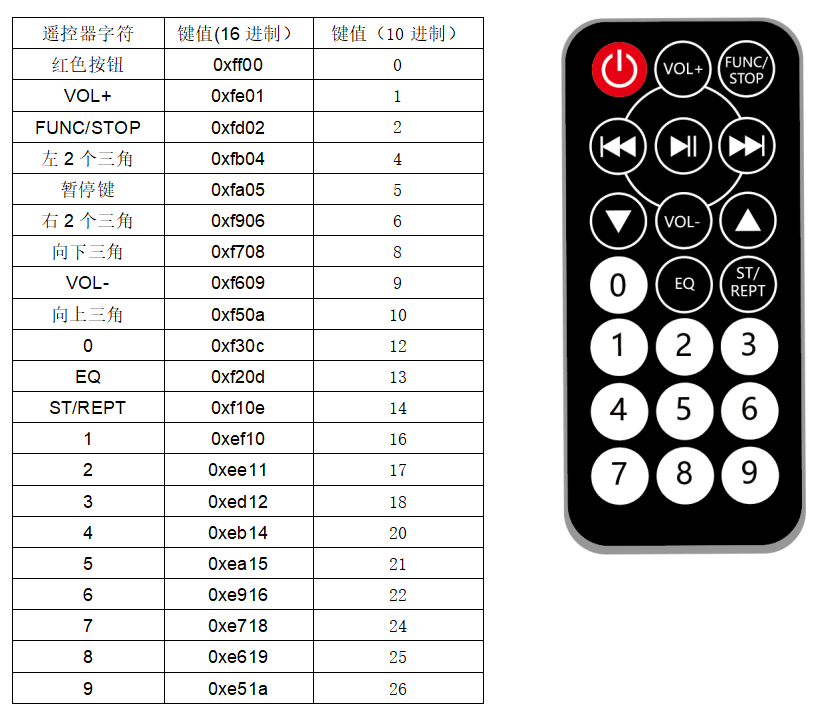
6-5. 红外遥控麦昆Plus
首先,我们熟悉一下红外遥控器以及键值。红外遥控器上的每一个按键都对应有一个唯一的键值,键值有两种进制表示,16进制和10进制,在麦昆PlusV2中,我们使用的是10进制。如图所示:
例程一:
下面的例程,我们使用红外遥控器的2、4、6、8四个按键分别控制小车的前进、左转、右转、后退。同时,让底部RGB灯和LED车灯均亮起来。
程序链接:https://makecode.microbit.org/_7aThcFKAjDqL
程序截图:

下载程序到microbit,按下红外遥控器的2键,麦昆PlusV2就朝前方行驶。按下4键,麦昆PlusV2往左边原地转弯,按下6键,麦昆PlusV2往右边原地转弯,按下8键,麦昆PlusV2后退行驶。
但是,在操作的过程中,我们发现了两个问题:
1、当我让小车转弯的时候,我只要按下了4键或者6键,小车就原地打转,控制起来感觉不灵活,且不符合实际车辆控制方式。
2、当小车正在后退的时候,按2键让小车前进时,小车因为反作用力的作用,往后倾倒了。我们尝试优化一下代码和操作体验:
程序链接:https://makecode.microbit.org/_MsvFPPVWKbqT
程序截图:

这个示例,我们对遥控的方式做了一些改变。在按下4键(键值20)或者6键(键值22)的时候,,只让小车转弯很短的时间(200毫秒)。这样,我们按一下,小车转一些,然后继续直行。如果我们需要转大弯的话,就多按几次。后退的时候,汽车都不会直接快速后退,那样会因为惯性的原因导致翻车,所以,我们把按8键(键值25)的后退功能修改成了停止。在本程序中,我们没有写后退部分的程序,你在编写自己程序的时候,尝试用另外一个按键来实现后退的功能。
6-6. 无线手柄遥控麦昆Plus
在本章节中,会使用到另外一个控制麦昆的方式和产品:遥控手柄。
产品链接:https://www.dfrobot.com.cn/goods-1674.html)
WIKI链接:https://wiki.dfrobot.com.cn/_SKU_DFR0536__micro_bit%E6%B8%B8%E6%88%8F%E6%89%8B%E6%9F%84%E6%89%A9%E5%B1%95%E6%9D%BF
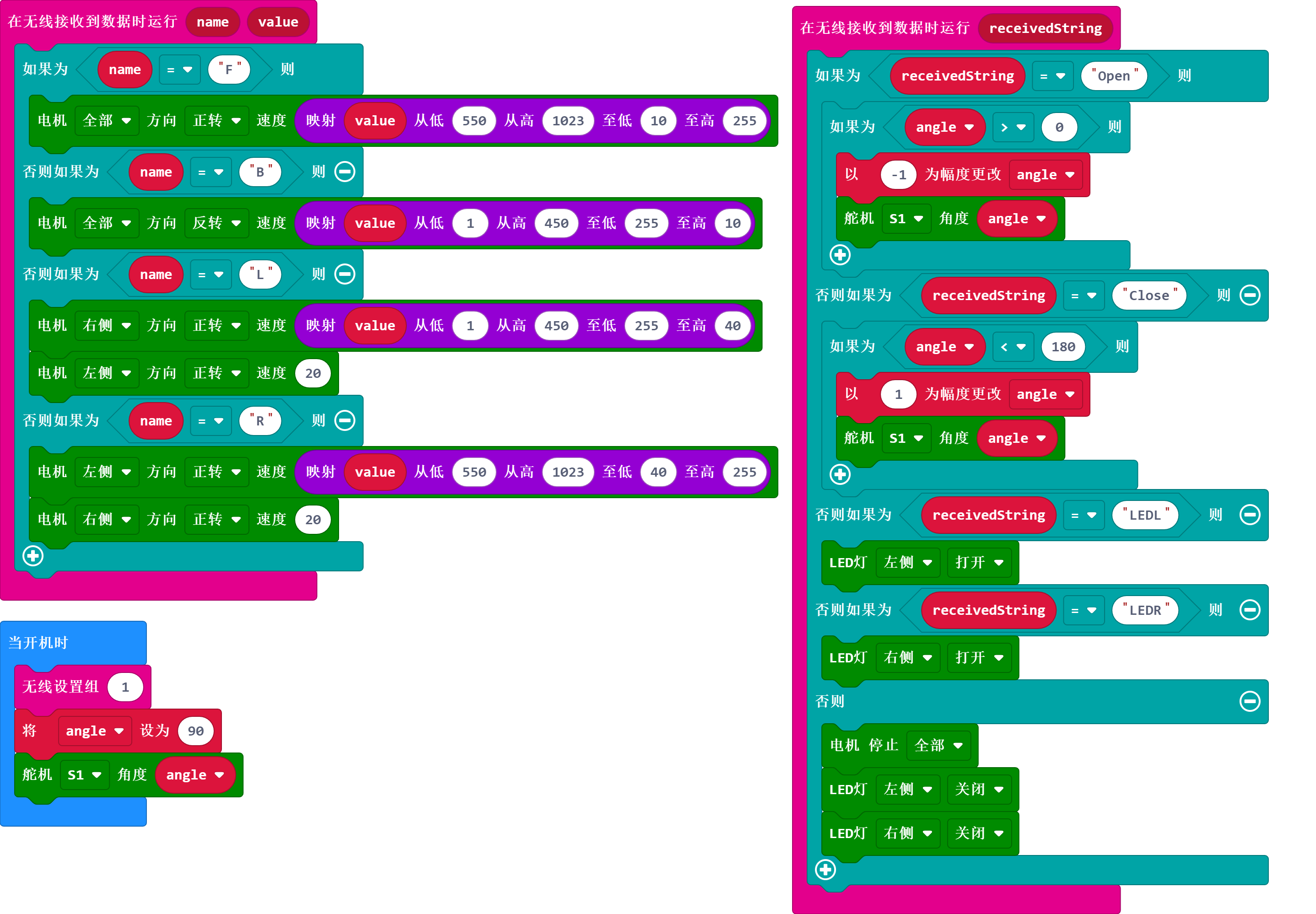
遥控手柄上需要安装另外一个microbit主板,两块主板通过无线网络通讯,从而实现遥控的功能。无线通讯和红外相比,它具有没有方向性,距离远等特点。下面我们尝试编写一个遥控小车。这次需要编写两块主板的程序,小车端的主板,编写接收和执行的程序。手柄端:需要编写发送指令的程序。
程序链接
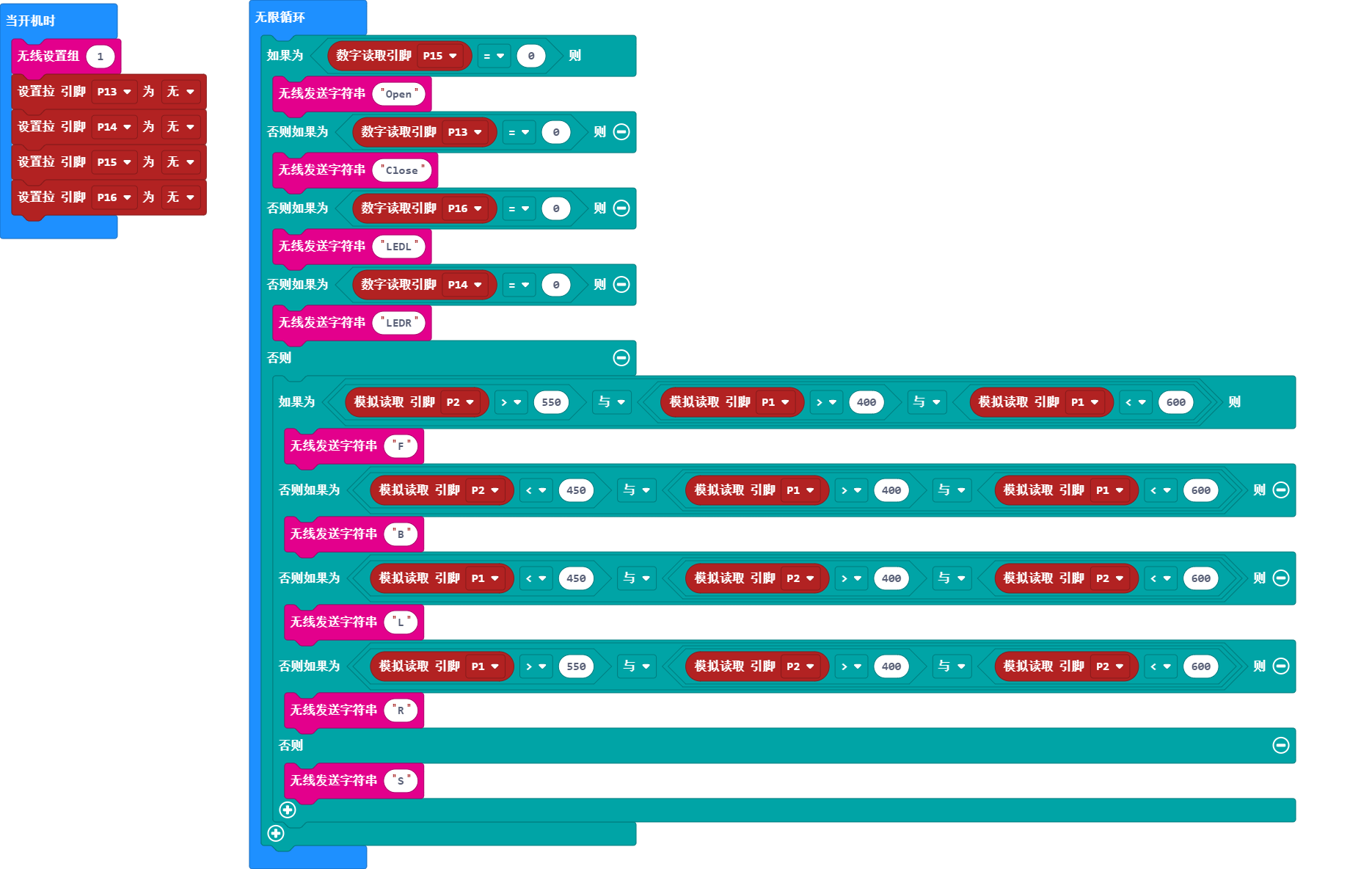
手柄端程序链接:https://makecode.microbit.org/_Ew9VCh414YW3
手柄端程序截图:
小车端程序链接:https://makecode.microbit.org/_bTPhA5JDs6mA
小车端程序截图:
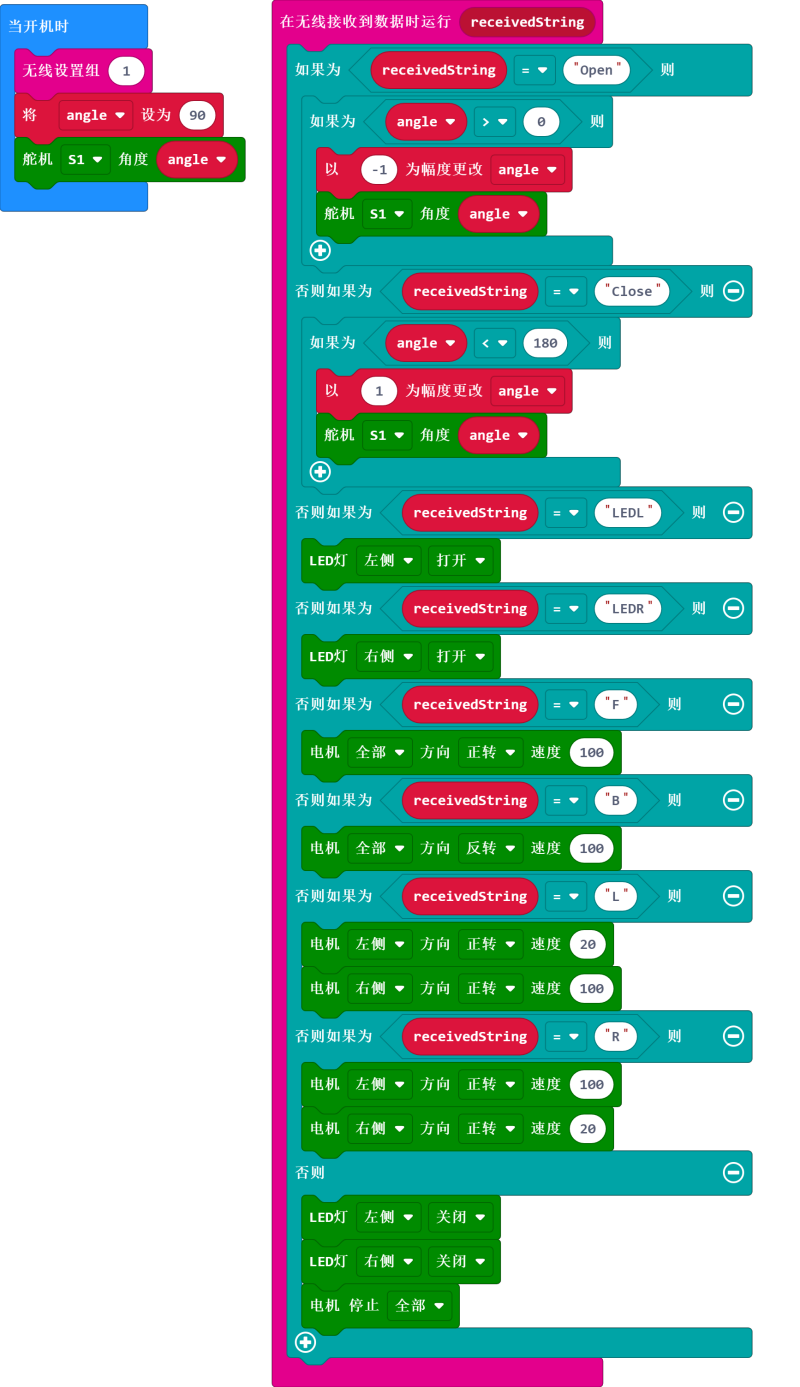
分别对手柄端的microbit主板和小车端的microbit主板下载对应的程序。打开手柄和小车的电源。搬动手柄左侧的摇杆,即可控制小车的前进,后退,左转,右转。
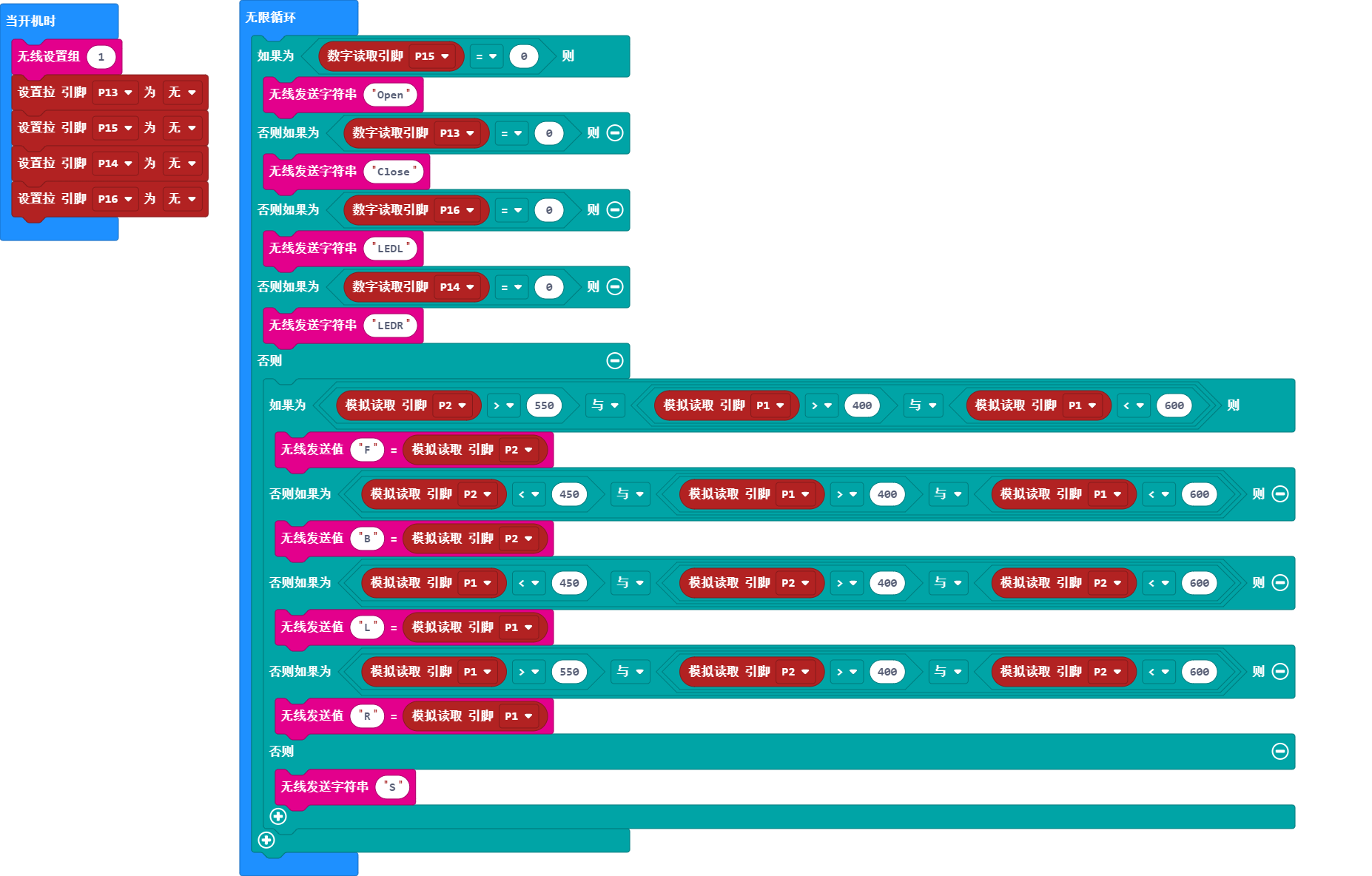
但是,你可能发现一个问题,我们只能控制小车的方向,不能控制小车的速度。下面我们来更新一下程序,让遥控手柄既可以控制方向,也可以控制速度。
手柄端程序链接:https://makecode.microbit.org/_99UJEH9hahwF
手柄端程序截图:
小车端程序链接:https://makecode.microbit.org/_evzJtbUqoLFt
小车端程序截图:
分别对手柄端的microbit主板和小车端的microbit主板下载对应的程序。打开手柄和小车的电源。轻轻的往前推动摇杆,小车的速度会逐渐的启动和变快。尝试着转弯和后退的操作,每一个方向的速度都和摇杆搬动的角度大小相关,你不仅可以控制小车的方向,也可以控制小车的速度了。
七. 巡线传感器校准方法
巡线传感器在出厂的时候已经校准好了,你无需再次校准。就像数码产品的复位按钮一样,你绝大多数情况下都不需要使用到。不正确的校准方法也会导致巡线传感器失效。
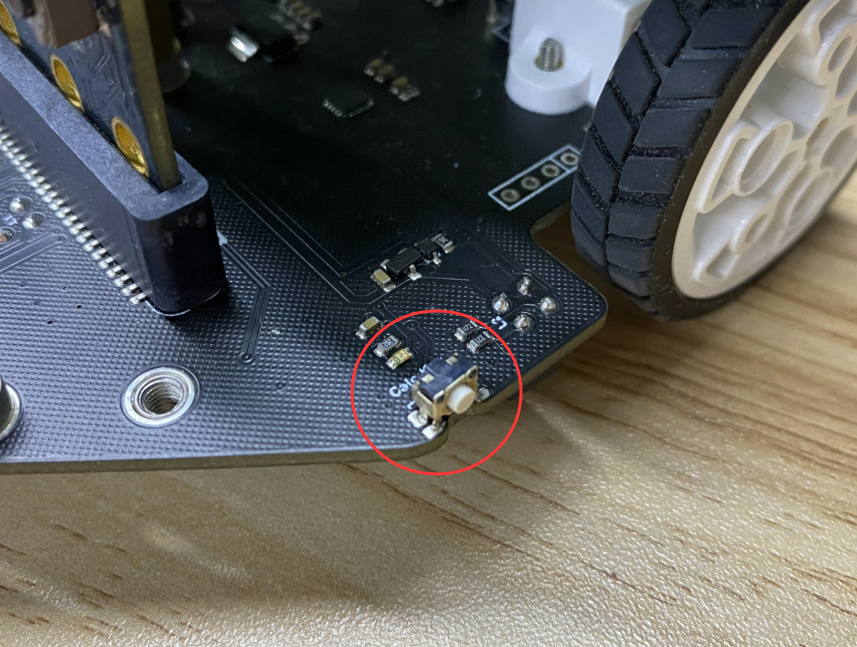
如果你发现巡线传感器不识别原来能正常识别的黑色线条,那么你可以尝试校准。方法如下:
1、将小车放在产品配送的地图黑色块上,并确保5个传感器都在黑色区域内。如图所示:
2、长按约1秒钟校准按键,此时,车灯闪烁,校准完成。
3、检查校准结果:校准完成后,将巡线传感器放到黑色区域,巡线指示灯亮,放在白色区域,指示灯灭,说明校准是正确的。
八、蜂鸣器切换开关
当你不需要使用蜂鸣器,又要使用P0口的时候,或者使用microbit V2主板的时候,可以使用这个开关关闭蜂鸣器。如图为打开蜂鸣器的状态。往另外一侧拨动即可关闭蜂鸣器的声音。

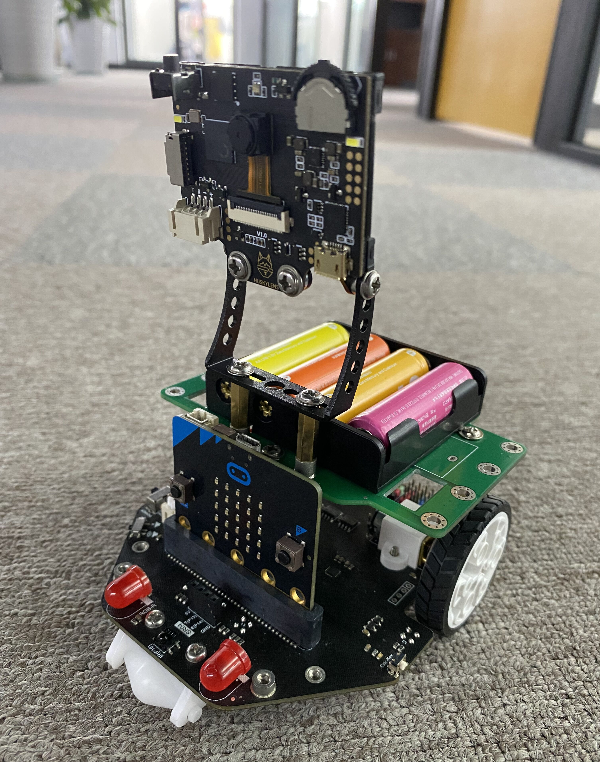
九、二哈识图AI摄像头安装方法
1、将产品配送的两颗铜柱安装在如图所示的位置:

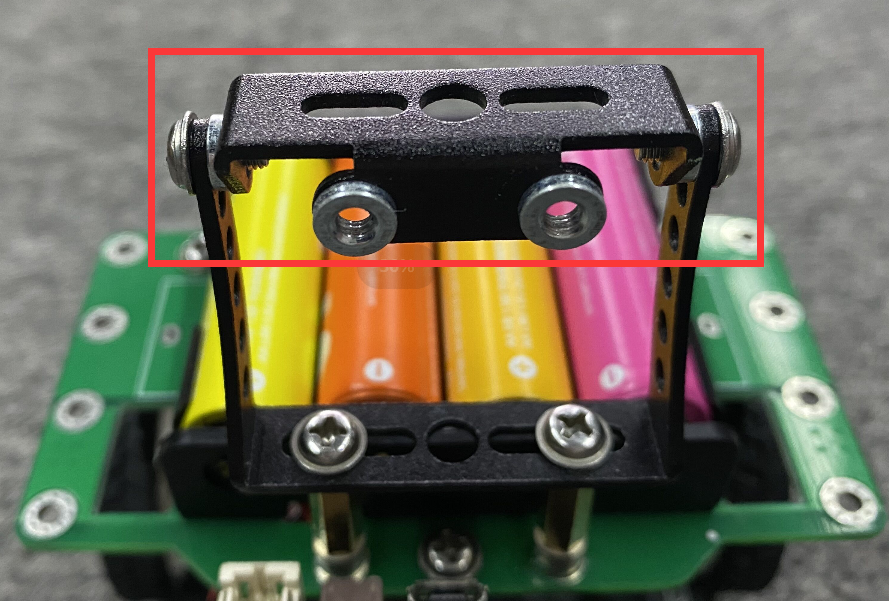
2、将圆弧形状的支架(二哈识图产品配有该支架及安装螺丝)用螺丝固定在铜柱上。
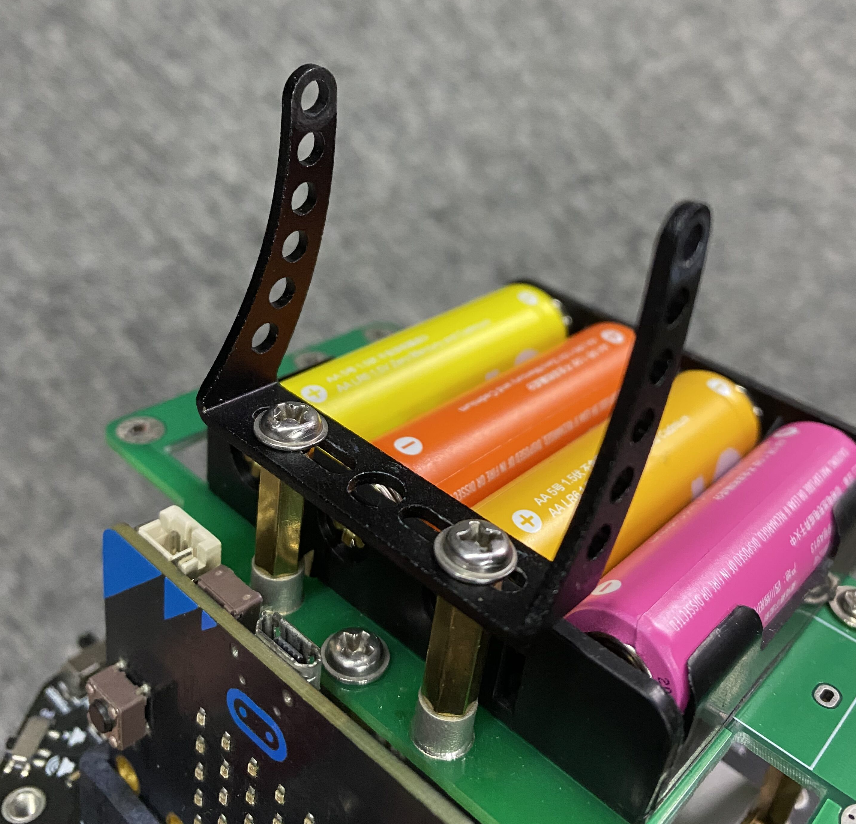
3、将另外一个支架安装上(二哈识图产品配有该支架及安装螺丝)
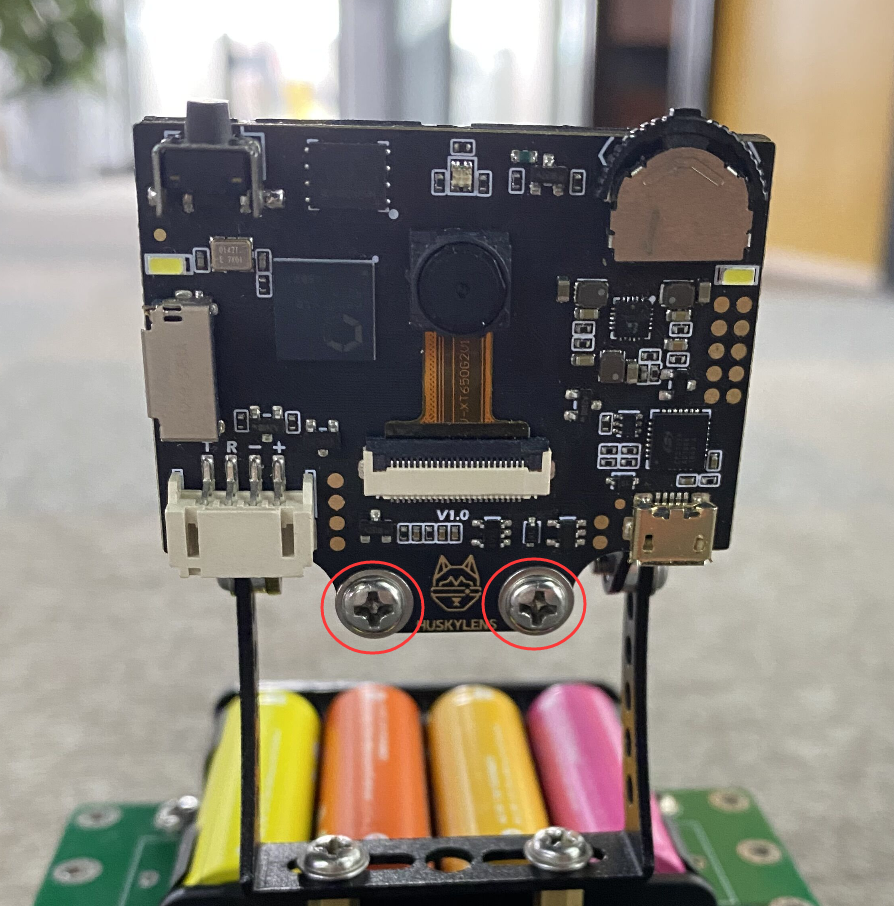
4、安装二哈识图AI摄像头
5、插上AI摄像头连线
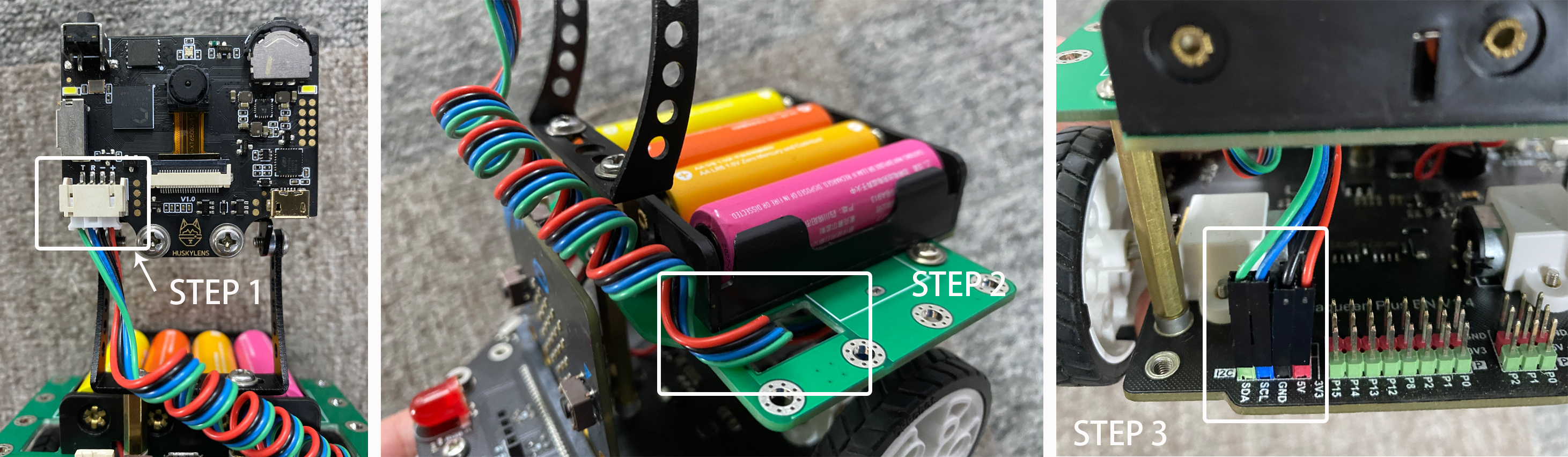
完成安装后的效果
十、麦昆工程队的安装方法
1、在图示位置安装好配送的铜柱。
2、将装配好的麦昆工程队用螺丝安装在铜柱上。
3、将舵机的连接线插在背后的P0或P1或P2任意一个5V接口上,注意方向不要插反。

疑难解答
更多问题及有趣的应用,请访问论坛
