行空板K10信息科技实验盒(高配版)
前言
随着信息技术在现代教育体系中的核心地位愈发显著,有效实施信息科技课程已成为教育工作者肩负的重要职责。在此背景之下,行空板K10信息科技实验盒应运而生,专为满足中小学信息科技课程的教学需求而精心打造。这款教学辅助工具旨在为广大教师和学生提供一个功能全面、易于操作的学习平台,助力大家轻松探索信息技术的无限魅力。
行空板K10信息科技实验盒集成了摄像头、双麦克风、小音箱等一系列关键组件,无需额外外接设备,即可轻松实现从基础传感器实验到复杂人工智能项目的全方位实践探索。其内置的丰富传感器种类(输入输出控制、环境感知、运动方向感知、障碍检测),结合先进的SIoT(智能物联网)技术,能够帮助学生构建完整的物联网信息系统。同时,内置的RFID(无线射频识别)模块也为教学带来了更多创新的灵感和可能。
此外,行空板K10信息科技实验盒凭借其高集成度和人性化的收纳设计,在教学场景中展现出极高的实用性。它不仅便于携带,还大大提升了教学效率,助力教师更高效地开展信息技术课程教学,促进学生对信息科技知识的深入理解和掌握。
目标
-
介绍行空板K10信息科技实验盒的主要组件及其功能,帮助用户熟悉各部分的使用方法。
-
指导用户进行基本的硬件连接和软件安装,以便顺利开启行空板K10信息科技实验盒的奇妙之旅。
-
提供基础示例项目,帮助用户通过实际操作来熟悉行空板K10信息科技实验盒的使用,从而掌握关键的技术概念和技能。
适用对象
-
中小学信息科技课程相关的教师及学生:这款实验盒将成为你们教学和学习过程中的得力助手,助力你们轻松掌握信息技术的精髓。
-
对开源硬件和机器人感兴趣的初学者及爱好者:无论你是初学者还是有一定基础的爱好者,行空板K10信息科技实验盒都将为你提供一个充满挑战和乐趣的学习平台。
-
已经使用过行空板K10的用户:如果你已经对行空板K10有所了解,那么本手册将帮助你更深入地挖掘其潜力,探索更多有趣的应用场景。
让我们一起携手踏上这段充满挑战和乐趣的信息科技之旅吧!本手册将带你深入探索行空板K10信息科技实验盒的强大功能和多种应用场景,从简单的操作入手,到复杂的项目实施,共同探索信息技术的无限可能性!
一、行空板K10信息科技实验盒通用知识
行空板K10信息科技实验盒是一款专门为满足信息科技课程标准而设计的多功能、高集成的教育实验箱套件。它方便收纳,适合大班教学,能帮助老师高效展开信息科技课程。
1.1 主要特点
-
以行空板K10为核心,搭配摄像头、双麦克风、小音响可实现各类人工智能项目。
-
集成丰富的输入、输出类传感器,接入SIoT可搭建完整的物联网信息系统。
-
提供丰富的扩展接口,支持更多功能的开发。
-
内置超声波、巡线、电机等模块,满足一台小车的基础功能。
-
结合教材需求,能够完成过程与控制、物联网、AI等常见项目的实践。
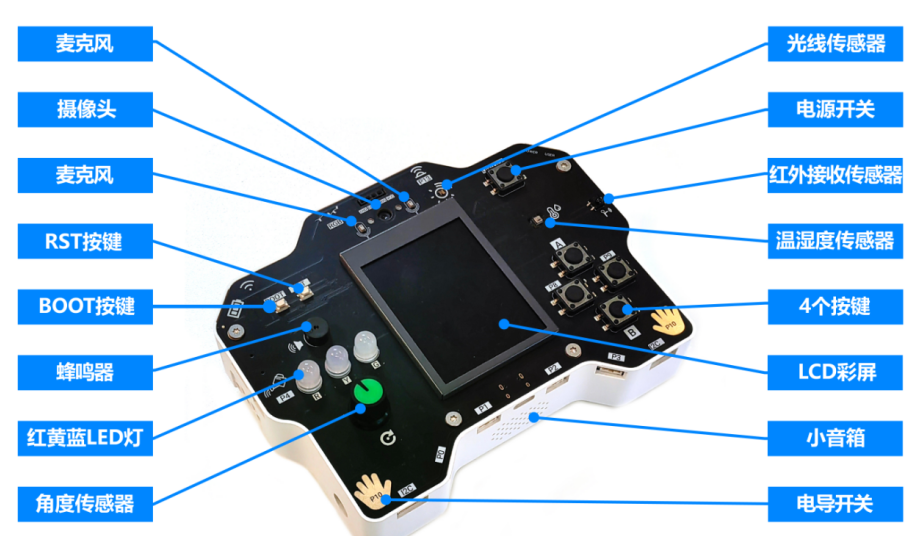
1.2 板载功能
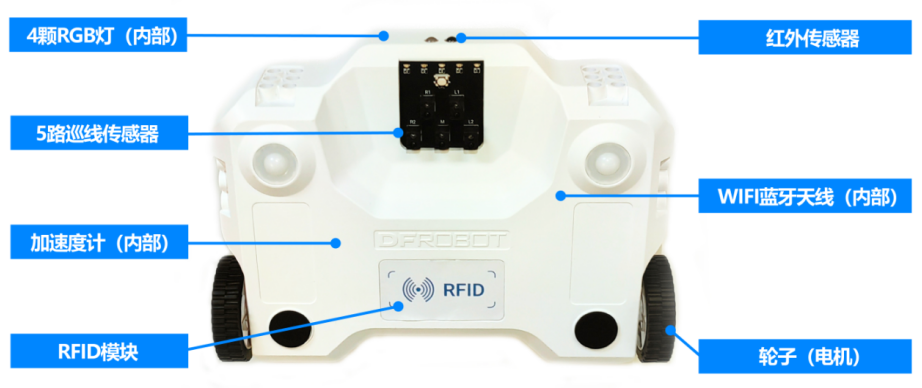
注:5路巡线传感器,电机,6轴加速度计,属于高配版中的功能。
1.3 详细功能说明
核心部分
行空板K10实验盒以行空板K10为核心,MCU、WIFI、蓝牙等核心参数,可以跳转到行空板K10 WIKI 了解核心部件。
传感器&执行器
| 功能 | 说明 |
|---|---|
| 屏幕 | 2.8寸 240x320 彩色 LCD |
| 光线传感器 | 检测范围:0~64k Lux |
| 六轴加速度传感器 | 三轴加速度 三轴陀螺仪 |
| 温湿度传感器 | 温度:-40-85℃ 精度±0.3℃湿度:0-100%RH 精度±2%RH |
| 实体按键 | ON/OFF按键:长按可开机/关机A按键(上按键):与K10单板上A按键功能一样B按键(上按键):与K10单板上B按键功能一样左按键:P8右按键:P9RST:复位按键BOOT:硬件初始化按键 |
| 电导开关 | 引脚:P10输出类型:高低电平 |
| 红外传感器 | 引脚:P13输出类型:高低电平检测距离:9~15cm备注:该传感器可拆卸,出厂时已经安装好。 |
| RFID模块 | 通信接口: I2C最大检测距离:不低于3cm |
| 摄像头 | 200W像素,60度镜头 |
| 红黄绿LED灯 | 直径:8mm输出类型:高低电平红灯和黄灯支持PWM控制 |
| RGB LED灯 | 侧发光 RGB灯 x 4亮度显示:0~255全彩:1600万色 |
| 喇叭 | 方形喇叭 |
| 红外接收传感器 | 红外接收x 1 |
| MEMS麦克风 | MEMS麦克风 x 2 |
| 蜂鸣器 | 蜂鸣器 x 1 |
| SR04超声波传感器(高配) | 型号:HC-SR04检测距离:2~400cm检测角度:约15度 |
| 5路巡线传感器(高配) | 探头数量:5路TTL信号输出:黑色高电平,白色低电平检测距离:1~2cm支持一键巡线校准 |
| 电机(高配) | 电机数量:2接口:M1,M2速度设置范围:0~255 |
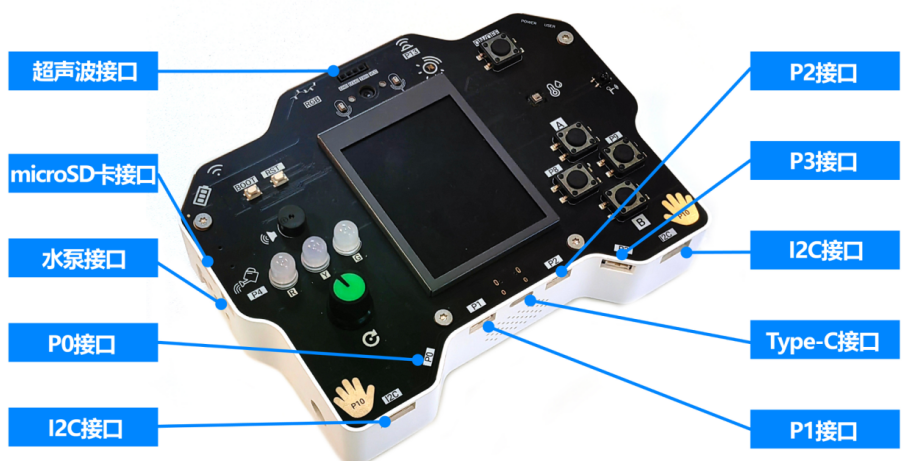
接口
| 功能 | 说明 |
|---|---|
| USB Type-C接口 | 用于连接PC编程或供电 |
| TF卡接口 | 用于扩展存储空间 |
| 3Pin I/O | P0,P1,P2,P3 |
| 4Pin I2C | 2路I2C接口 |
| 2Pin 水泵接口 | P4 |
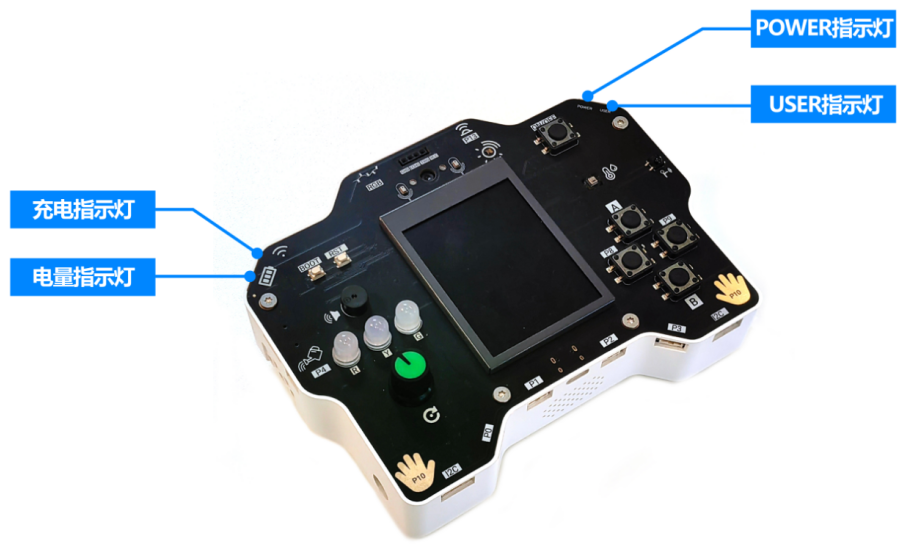
指示灯
| 功能 | 说明 |
|---|---|
| 电量指示灯 | 状态:白色,紫色,红色白色表示电量50%~100%,紫色表示电量25%~50%,红色表示电量0%~25%。 |
| USER指示灯 | 状态:闪烁红色USER灯闪烁表示系统正常运行 |
| POWER指示灯 | 状态:红色电源灯,开机就显示红色 |
| 充电指示灯 | 状态:绿色接上充电线时一直亮绿色,充满电后熄灭 |
电源
| 功能 | 说明 |
|---|---|
| 供电 | 18650电池供电 |
| 工作电压 | 3.3V |
| 最大工作电流 | 1500mA |
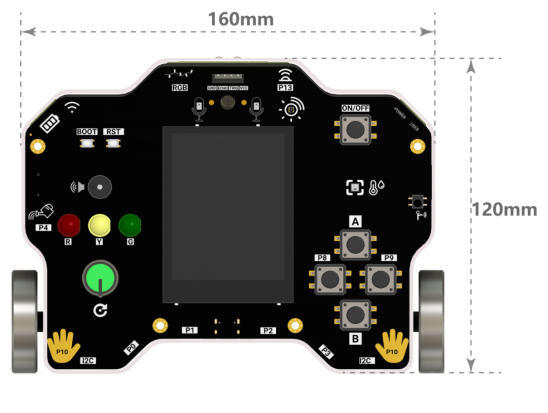
1.4尺寸
长x宽x高:160mmx120mmx33mm
 |
 |
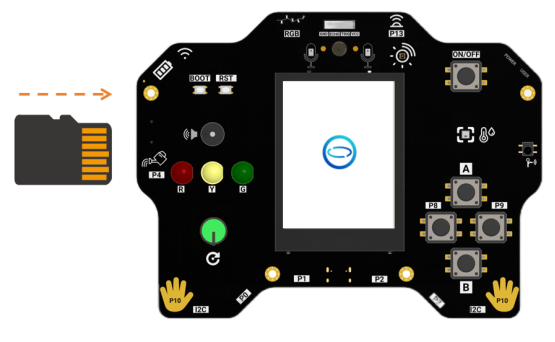
1.5 存储卡操作
行空板K10信息科技实验盒的左侧上方,有一个micro SD卡槽,高配版的行空板K10信息科技实验盒,在出厂时插好了内存卡。
-
取卡操作:通过按压弹出的方式进行取卡,切勿强行取卡,以免损坏卡槽或存储卡。
-
插卡操作:将SD插入卡槽中,听到卡被扣住的声音,才算插卡完成,插入方式见下面操作图。
1.6 行空板K10通用知识
行空板K10是一款专为快速体验物联网和学习人工智能而设计的开发学习板,100%采用国产芯片,知识产权自主可控,符合信息科技课程中编程学习、物联网及人工智能等教学需求。行空板K10的核心特点如下:
1. 高度集成:行空板K10集成了LCD彩屏、WiFi蓝牙、摄像头、麦克风、扬声器、RGB指示灯、多种传感器及丰富的扩展接口,无需额外连接其他设备,便可轻松实现传感器控制、物联网应用以及人脸识别、语音识别、语音合成等人工智能项目。
2. 人工智能算法集成:内置了基础的图像检测、语音识别、语音合成等AI算法,并集成了摄像头、麦克风、扬声器等器件,助力广大师生轻松开始AI学习。
3. 大尺寸全彩显示屏:配备了2.8寸全彩显示屏,分辨率高,色彩丰富,为创意提供了无限可能,无论是制作精美的图形界面还是展示丰富多彩的图像,都能让作品更加生动有趣。
4. 物联网支持:可作为物联网系统中的终端节点使用,满足物联网教学需求,集成了WiFi和蓝牙模块,全面支持物联网应用。
5. 接口丰富、可扩展性强:拥有丰富的扩展接口,支持板载接口和金手指接口,可以根据自己的需求连接各种外部设备,拓展更多的功能。
6. 多种编程方式:支持图形化编程和MicroPython编程,无论编程新手还是经验丰富的科创老师,都能找到适合自己的编程方式。
- 更多详细内容,请查看行空板K10官方文档。
二、编程平台
2.1 使用Mind+编程
-
下载行空板K10公测版Mind+压缩包:
下载方法请参考行空板K10快速使用教程中的4.软件准备
-
编程软件打开后,切换到“上传模式”,并点击“扩展”,在“主控板"中,选择”行空板K10“。

- 行空板K10信息科技实验盒对应的内置模块库,需要在“扩展”的“用户库”中,使用链接进行检索并加载:
行空板K10信息科技实验盒库链接:https://gitee.com/zhaoruiz/ext-unihiker-k10-box
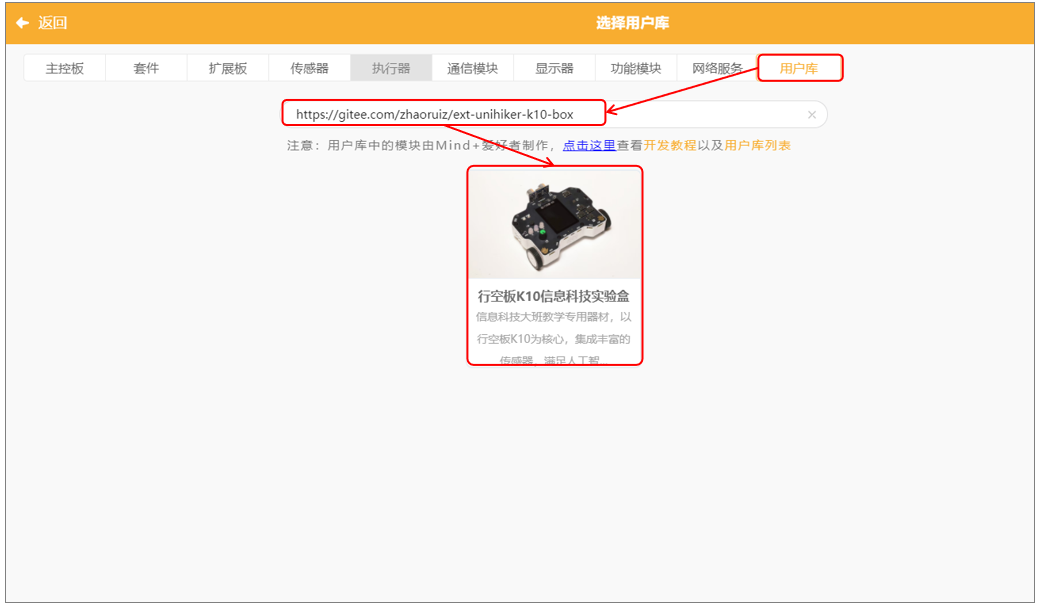
- 添加完成后,点击“返回”,切换到编程界面。

2.2 连接主控-行空板K10
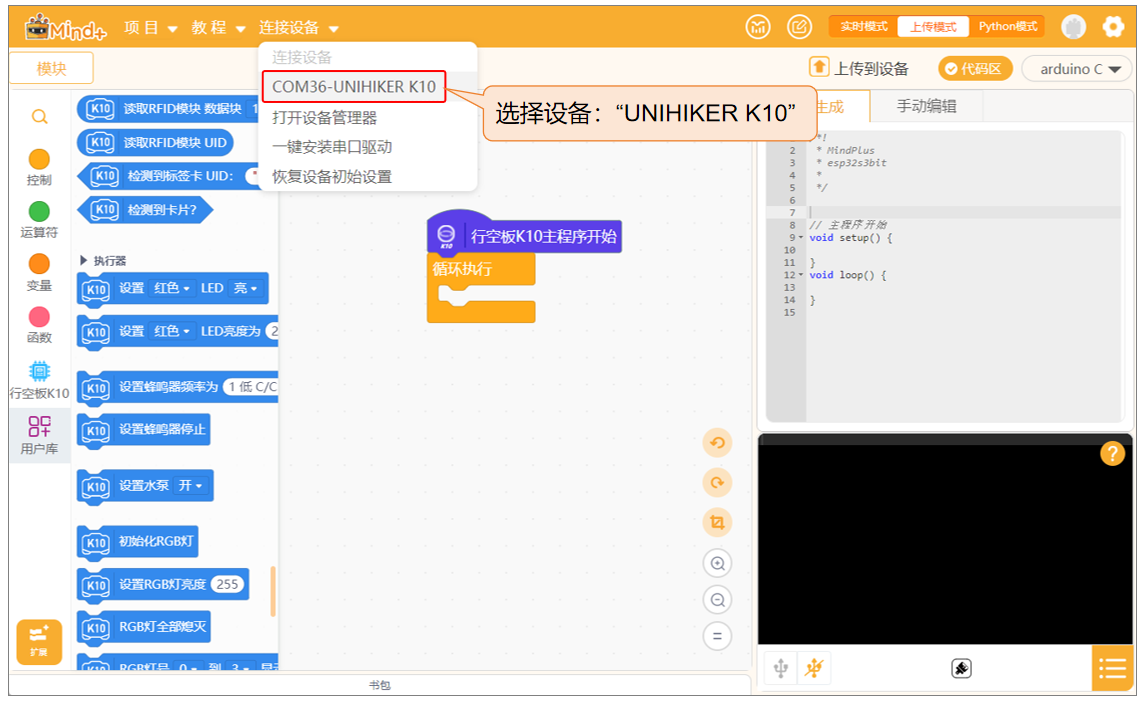
- 使用USB线将行空板K10信息科技实验盒与电脑进行连接,连接成功后,长按开/关机键“ON/OFF”,等待“POWER”指示灯亮起。

- 在Mind+中,点击菜单栏的“连接设备”,找到对应的“UNIHIKER K10”设备,并点击,完成设备连接。
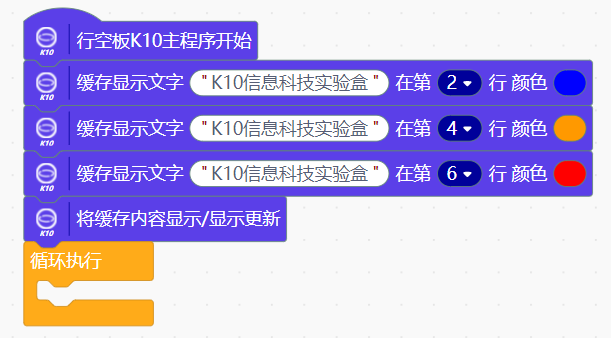
- 编写程序,分别在行空板K10信息科技实验盒屏幕上的第2、4、6行,显示不同颜色的文字”K10信息科技实验盒“。
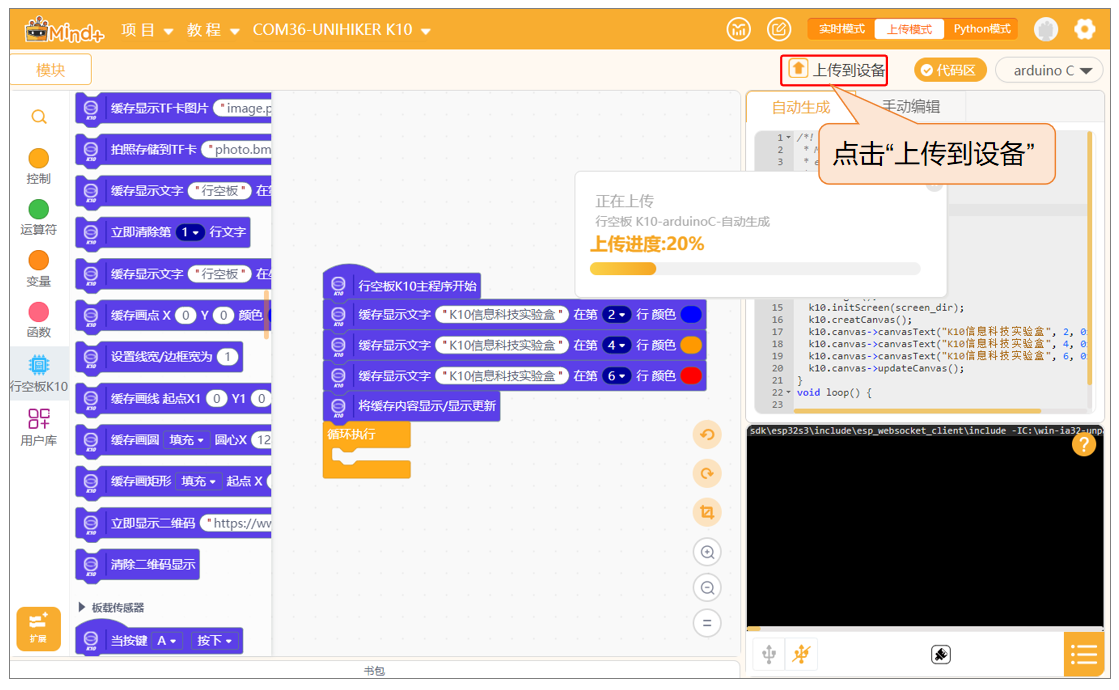
- 点击“上传到设备”,等待程序上传完成。
- 程序上传成功后,K10屏幕上,显示不同颜色的文字“K10信息科技实验盒”。

- 若编译任何代码都报错,请查看:公测版解压问题
- 特别提示:行空板K10单板上完成的程序,都可以在行空板K10信息科技实验盒上运行。
三、行空板K10信息科技实验盒基础使用说明
3.1传感器
角度传感器
| 积木 |  |
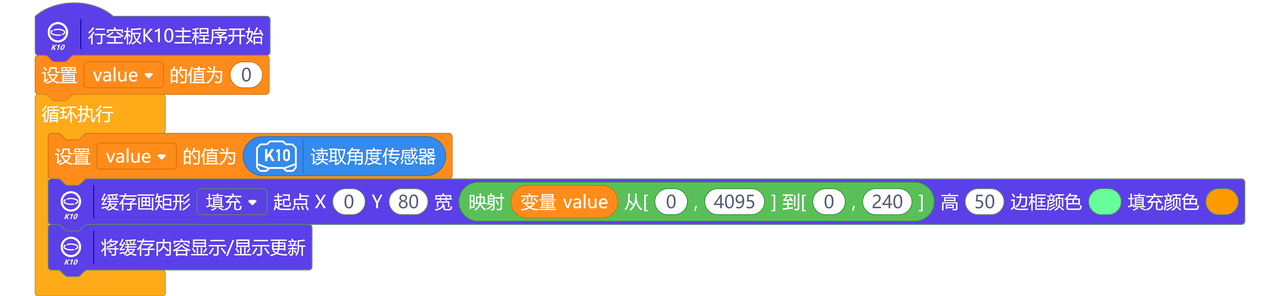
| 功能说明 | 读取板载角度传感器的值。当传感器顺时针转动时,返回的值会增大;逆时针转动时,值会减小。输出值的范围为 0 到 4095。 |
示例项目:在主控屏幕上,绘制矩形框,并通过转动角度传感器来填充矩形框。
示例程序:
示例效果:
声音传感器
| 积木 |  |
| 功能说明 | 读取声音强度,检测到的声音越大,数值越高。 |
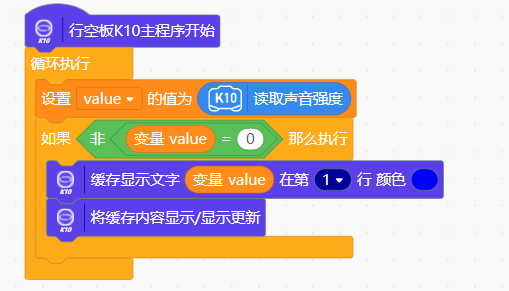
示例项目:将获取到的声音强度值,实时的显示在K10屏幕上。
示例程序:
示例效果:
按键
| 积木 |  |
| 功能说明 | 该指令用于判断试验箱上板载的上(A)、下(B)、左(P11)、右(P12)按键,是否被按下。 |
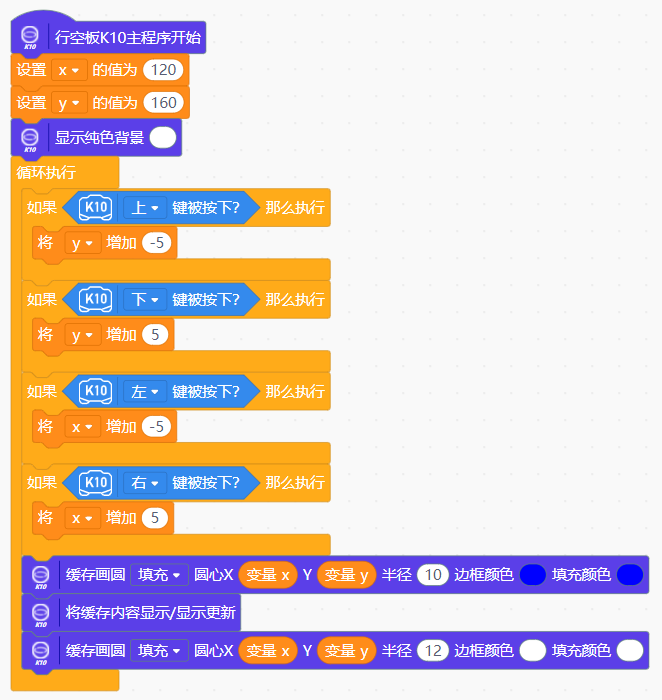
示例项目:在K10屏幕上绘制一个小圆球,通过上下左右按键,控制K10屏幕上的小圆球进行上下左右移动。
示例程序:
示例效果:
电导开关
| 积木 |  |
| 功能说明 | 该指令用于判断实验盒上的P10引脚是否被导通。 |
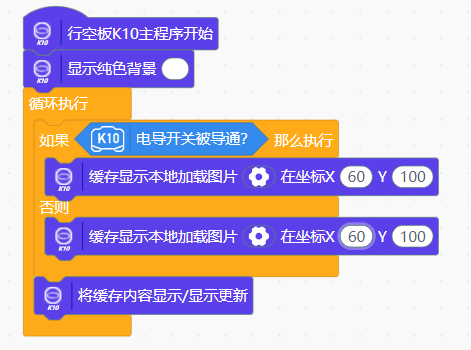
示例项目:当电导开关被接通后,K10屏幕上显示心形图案,否则,显示心碎图案。
示例程序:
示例效果:
红外检测传感器
| 积木 |  |
| 功能说明 | 该指令用于判断红外传感器是否检测到前方是否有障碍物。 |
示例项目:实验盒前方的红外避障传感器检测到前方有障碍物时,K10屏幕上显示障碍物提示图片,否则,不显示。
示例程序:

示例效果:
RFID射频识别
| 积木 |  |
| 功能说明 | 初始化RFID模块。 |
| 积木 |  |
| 功能说明 | 该指令用于向标签卡写入数据。注意:1. 白卡前4个数据块为只读区,不可写入数据。从第5个数据块开始,可以进行写入操作。2. 白卡的数据结构为每个数据块可存放4个字节数据,因此写入时,每个数据块只能写入4个字节。3. 圆形卡的所有数据块都是可读写操作的,并且每个数据块可以写入16个字节。 |
| 积木 |  |
| 功能说明 | 该指令用于从标签卡中,读取指定数据块的所有数据。 |
| 积木 |  |
| 功能说明 | 该指令用于从标签卡中,读取指定数据块指定指令字节的数据。 |
| 积木 |  |
| 功能说明 | 该指令用于读取标签卡的编号。 |
| 积木 |  |
| 功能说明 | 该指令用于判断检测到的标签编号,是否是我们填入的编号。 |
| 积木 |  |
| 功能说明 | 该指令用于判断在检测区是否检测到标签卡。 |
示例项目-01:读取标签卡的UID编号,并将读取到的编号显示在K10屏幕上。
示例程序:

示例效果:
示例项目-02:当识别到白卡的编号(04b3e1b5)时,在K10屏幕上显示文字“欢迎回家”,当识别到其他编号的卡时,显示文字“请刷正确的卡”。
示例程序:
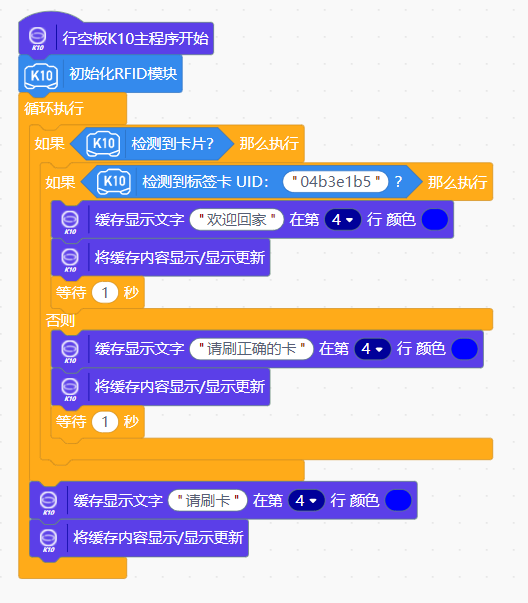
示例效果:

项目示例-03:通过实验盒上的左按键,向卡片的第5个数据块种的第一个字节写入数据10,然后通过按下右键,查看写入的数据是否成功。
示例程序:
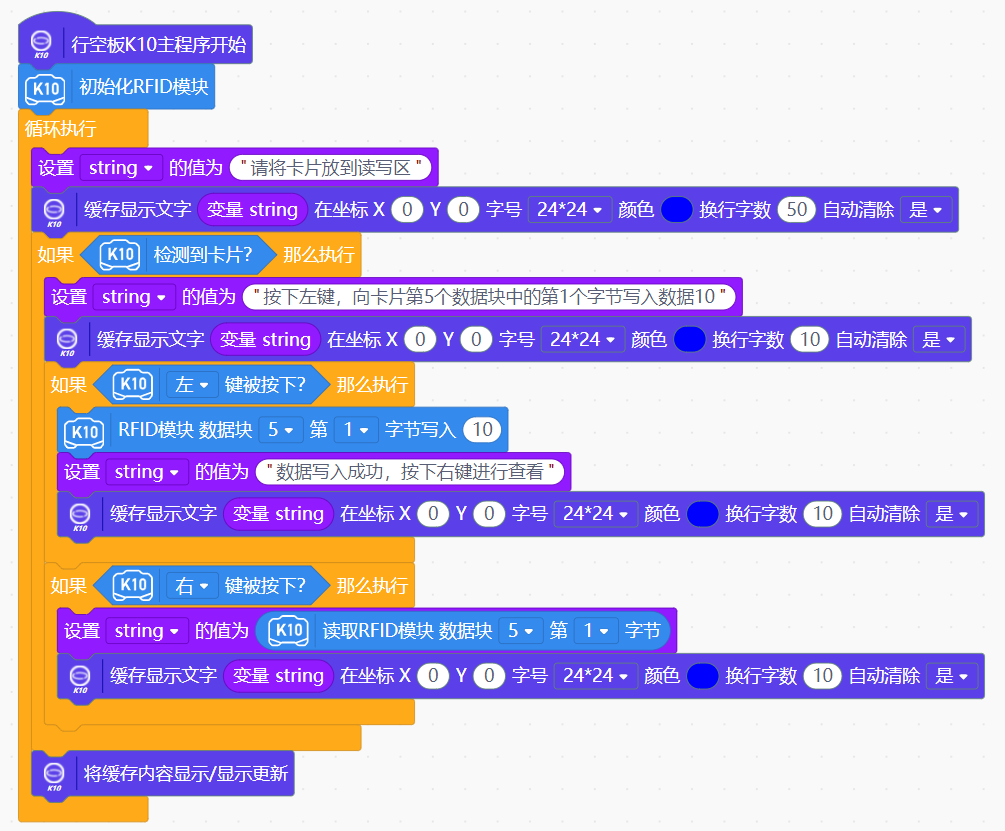
示例效果:
3.2执行器
红绿灯
| 积木 |  |
| 功能说明 | 该指令用于控制板载的红(P2)、黄(P3)、绿(P4)三个LED灯亮或灭。 |
| 积木 |  |
| 功能说明 | 该指令用于设置板载的红灯、黄灯、路灯的亮度。 |
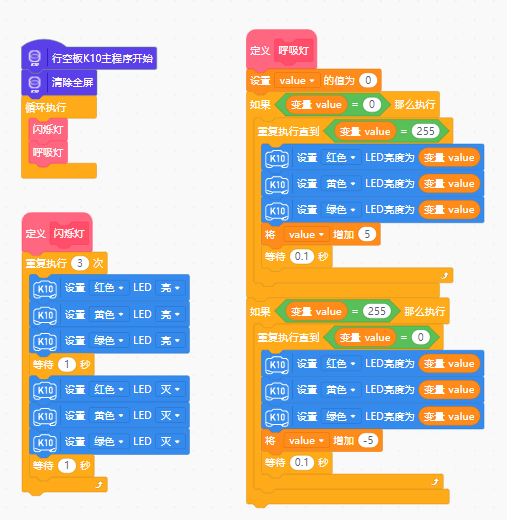
示例项目:控制红黄绿三个灯执行三次亮灭后,再控制三个灯的亮度由灭——逐渐亮,再由亮——逐渐灭。
示例程序:
示例效果:

蜂鸣器
| 积木 |  |
| 功能说明 | 控制蜂鸣器发出不同频率的声音。 |
| 积木 |  |
| 功能说明 | 控制蜂鸣器停止发声。 |
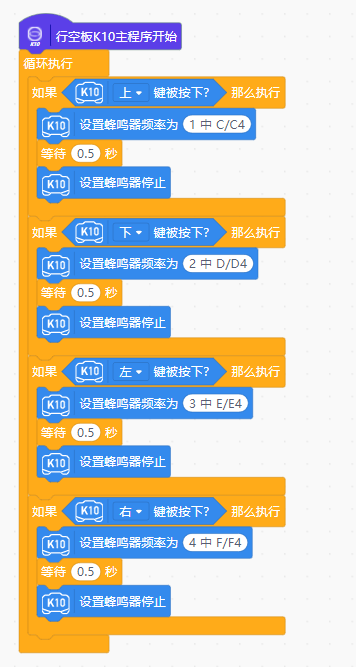
示例项目:通过实验盒上的上下左右按键,控制蜂鸣器发出“哆瑞咪发”的声音。
示例程序:
RGB LED灯
| 积木 |  |
| 功能说明 | 该指令用于初始化连接在P9引脚上的RGB灯。 |
| 积木 |  |
| 功能说明 | 该指令用于设置RGB灯的亮度。最低值为:0,RGB灯灭;最大值为:255,RGB灯最亮状态。 |
| 积木 |  |
| 功能说明 | 该指令用于控制RGB灯全部熄灭。 |
| 积木 |  |
| 功能说明 | 该指令用于设置指定的RGB LED灯的显示颜色。一共有4个RGB灯,灯的编号从0-3。 |
| 积木 |  |
| 功能说明 | 该指令用于将指定范围内的 RGB LED 灯设置为彩虹颜色效果 |
| 积木 |  |
| 功能说明 | 该指令用于将所有 RGB LED 灯的颜色向前移动指定单位的位置。 |
| 积木 |  |
| 功能说明 | 该指令用于将所有RGB LED灯的颜色进行循环的旋转操作。颜色会根据指定的单位进行旋转。 |
| 积木 |  |
| 功能说明 | 该指令用于通过RGB三原色的值,控制RGB ELD的灯颜色显示。每个颜色的值为0-255。 |
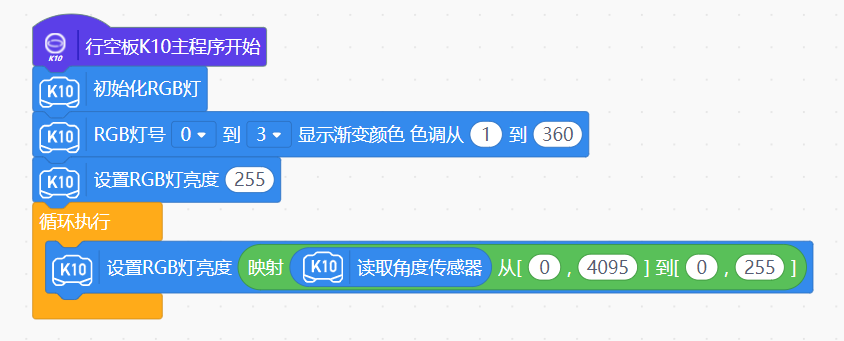
示例项目-01:分别设置4个RGB LED灯显示彩虹色,然后通过角度传感器控制RGB LED灯的亮度。
示例程序:
示例效果:
示例项目-02:通过将RGB灯循环移动一个单位,实现跑马灯的效果。
示例程序:

示例效果:

水泵开关
| 积木 |  |
| 功能说明 | 控制水泵开启或关闭。 |
硬件连接:将水泵连接到P4水泵引脚。
示例项目:通过实验盒上的按钮,控制水泵开关。按下上键,打开水泵,按下下键,关闭水泵。
示例程序:

示例效果:
3.3高配功能
超声波传感器
| 积木 |  |
| 功能说明 | 该指令用于获取超声波传感器检测到的距离。 |
硬件连接:将超声波传感器连接到对应的引脚,并且需要注意,超声波的探头朝前。

示例项目-01:当超声波传感器检测到的距离小于10cm时,红灯亮,否则,红灯灭。
示例程序:
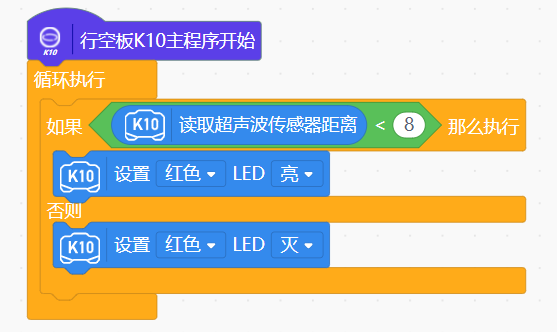
示例效果:
示例项目-02:将超声波传感器检测到的距离,实时的显示在主控屏幕上。
示例程序:
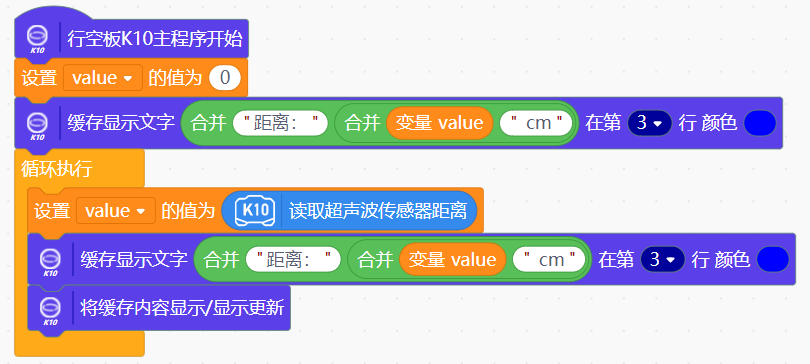
示例效果:
红外接收传感器
| 积木 |  |
| 功能说明 | 接收红外遥控器发射出的红外值。 |
示例项目:使用实验盒上的红外接收传感器,将接收到的红外信息,显示在K10屏幕上。
示例程序:
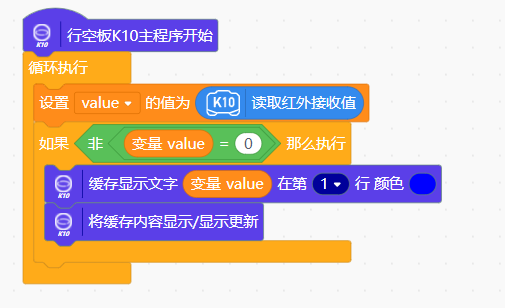
示例效果:

6轴加速度
| 积木 |  |
| 功能说明 | 读取板载加速度传感器(X方向、Y方向、Z方向或强度)的数值,单位为毫重力(m-g)。 |
| 积木 |  |
| 功能说明 | 用于获取在X轴、Y轴、X轴的角速度值。 |
示例项目:在屏幕上绘制一个小球,通过加速度计检测到的x、y值。控制小球在K10屏幕上移动。
示例程序:
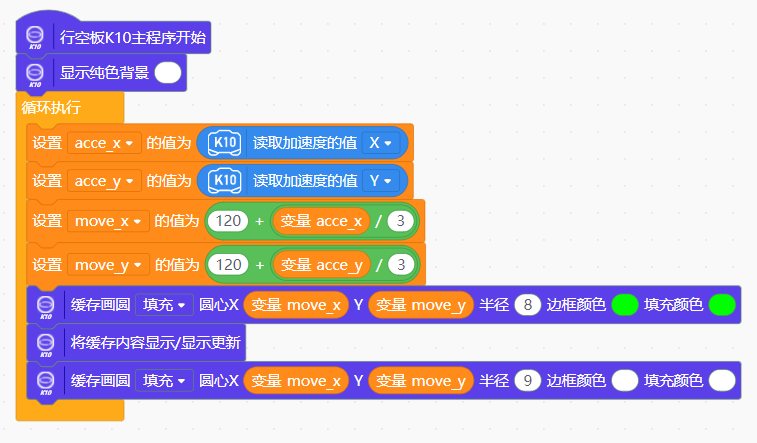
示例效果:

巡线传感器
| 积木 |  |
| 功能说明 | 初始化巡线传感器 |
| 积木 |  |
| 功能说明 | 设置巡线传感器的阈值。 |
| 积木 |  |
| 功能说明 | 获取巡线传感器模块所有探头阈值。获取阈值的顺序为:L2、L1、M、R1、R2。 |
| 积木 |  |
| 功能说明 | 获取巡线传感器模块所有探头的模拟值,获取的模拟值顺序为:L2、L1、M、R1、R2。注意:巡线传感器探头的模拟值为:0-255 |
| 积木 |  |
| 功能说明 | 获取巡线传感器模块所有探头的数字值,获取的数字值顺序为:L2、L1、M、R1、R2。 |
| 积木 |  |
| 功能说明 | 该指令用于一次获取巡线模块所有探头的数字值,获取的数字值顺序为:L2、L1、M、R1、R2。 |
| 积木 |  |
| 功能说明 | 该指令用于获取巡线模块指定探头的数字值。 |
注意:在使用之前,可以将巡线传感器放到对应的校准区,进行校准。
校准方法:将巡线传感器放到校准区,确保所有探头都在校准区,长按校准按钮,直到蓝色指示灯亮起,松开按钮,等待蓝色灯连续闪烁三次后,完成校准。

示例项目-01:设置巡线探头L2、L1、M、R1、R2的阈值分别为50、60、70、80、90,然后将所有探头的阈值显示在主控屏幕上。
注意:在设置巡线探头的阈值后,如果我们再对巡线传感器进行了校准,那么阈值会变成校准后的阈值。
示例程序:
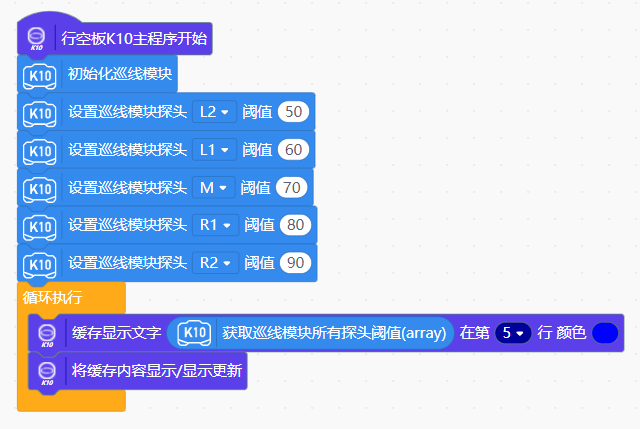
示例效果:

示例项目-02:获取巡线传感器的模拟值和数字值,并显示在主控屏幕上。
示例程序:

示例效果:
 |
 |
电机控制
| 积木 |  |
| 功能说明 | 控制电机的转速与转向。电机:M1(左侧)、M2(右侧)、全部速度:0-255方向:正转、反转 |
| 积木 |  |
| 功能说明 | 控制电机停止运行。控制方式:M1(左侧)、M2(右侧)、全部。 |
示例项目-01:控制左右两个电机先正转1秒,反转1秒,最后停止1秒。
示例程序:
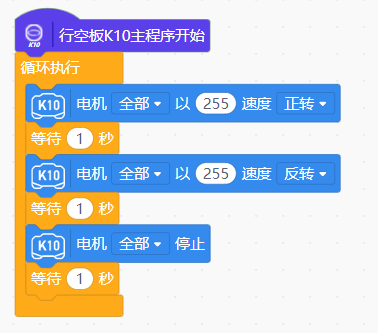
示例效果:
示例项目-02:利用巡线传感器检测到的数字值,控制实验盒的电机,让实验盒能够完成巡线操作。
示例程序:
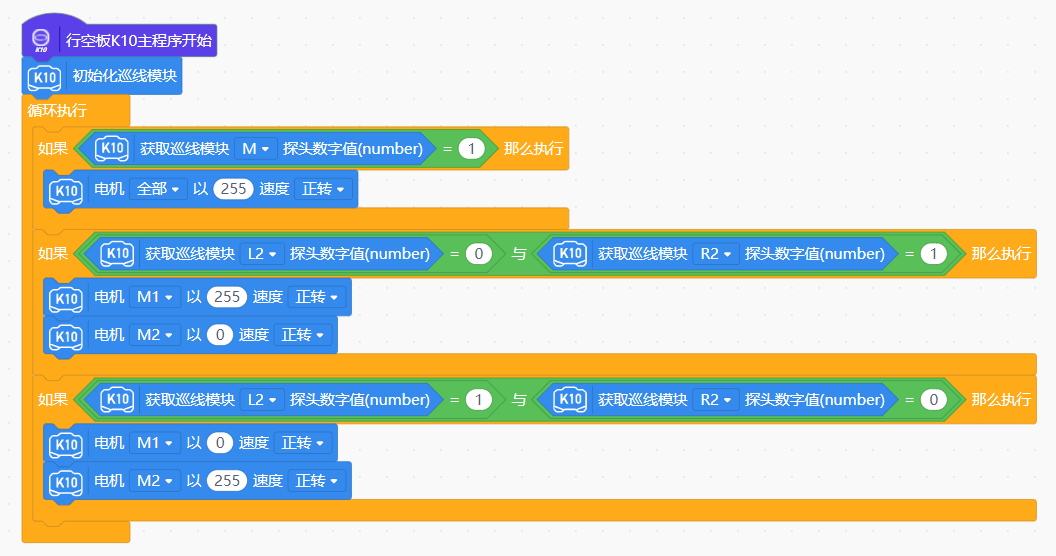
示例效果:
综合项目
项目1-红外遥控灯
硬件准备:
- 实验盒 x1
- 红外遥控器 x1
示例项目:使用红外遥控器上的电源按钮,控制行空板K10信息科技实验盒的LED开启或关闭。
示例程序:
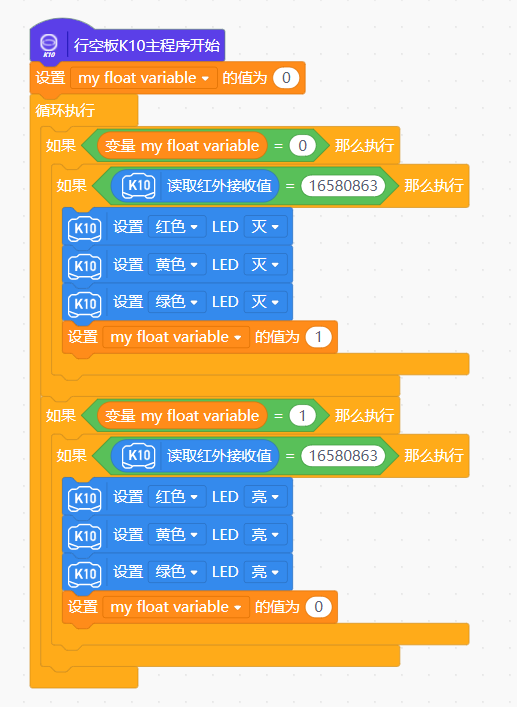
示例效果:

项目2-红外遥控小车
硬件准备:
- 实验盒 x1
- 红外遥控器 x1
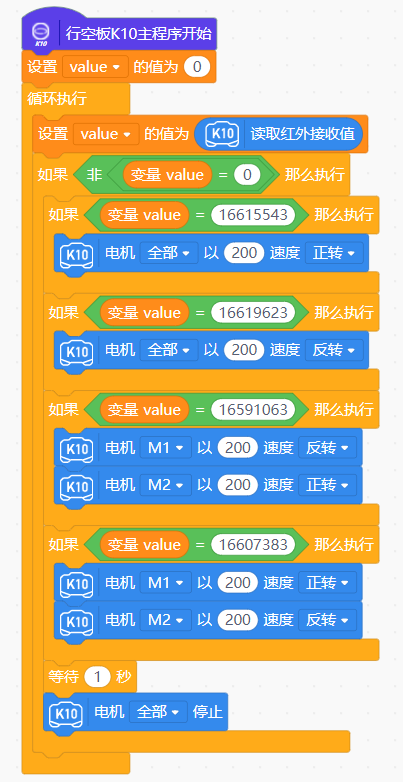
示例项目:通过红外遥控器上的2、8、4、6按键,控制小车前进1秒、后退1秒、左转1秒、右转1秒。
示例程序:
项目3-土壤湿度控制好
硬件准备:
- 实验盒 x1
- 水泵 x1
- 土壤湿度传感器 x1
硬件连接:
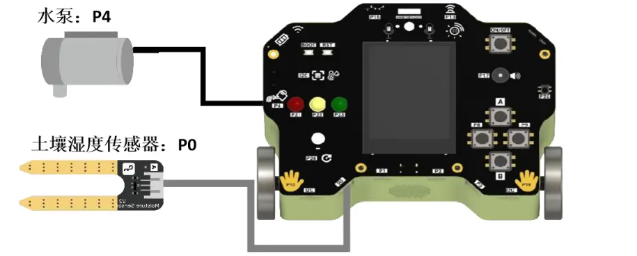
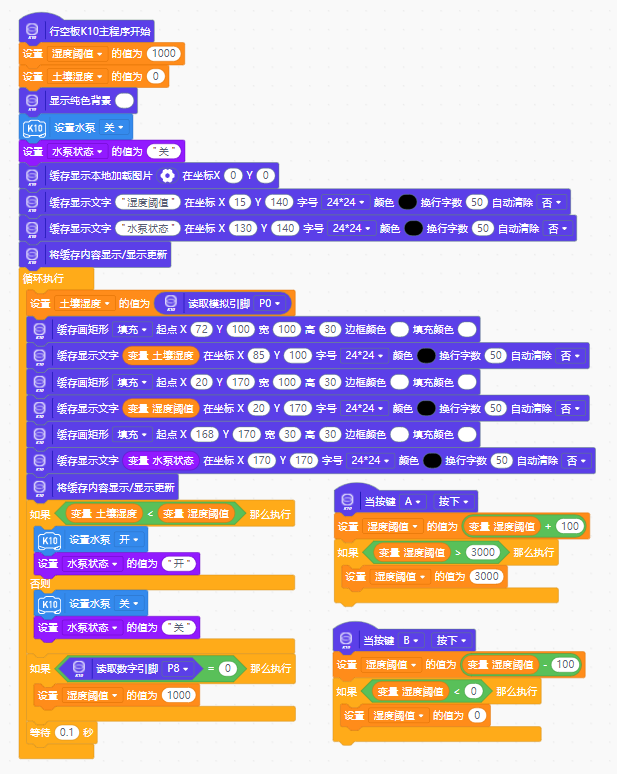
示例项目:通过实验盒上的A、B按键调节土壤湿度阈值,当检测到的土壤湿度值小于设置的土壤湿度阈值时,水泵自动打开;否则,水泵自动关闭。
示例程序:
示例效果:
项目4-温控空调
硬件准备:
- 实验盒 x1
- 风扇模块 x1
硬件连接:
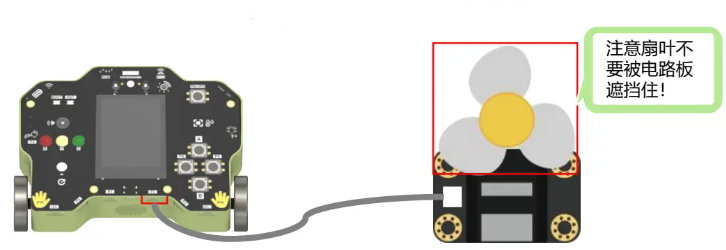
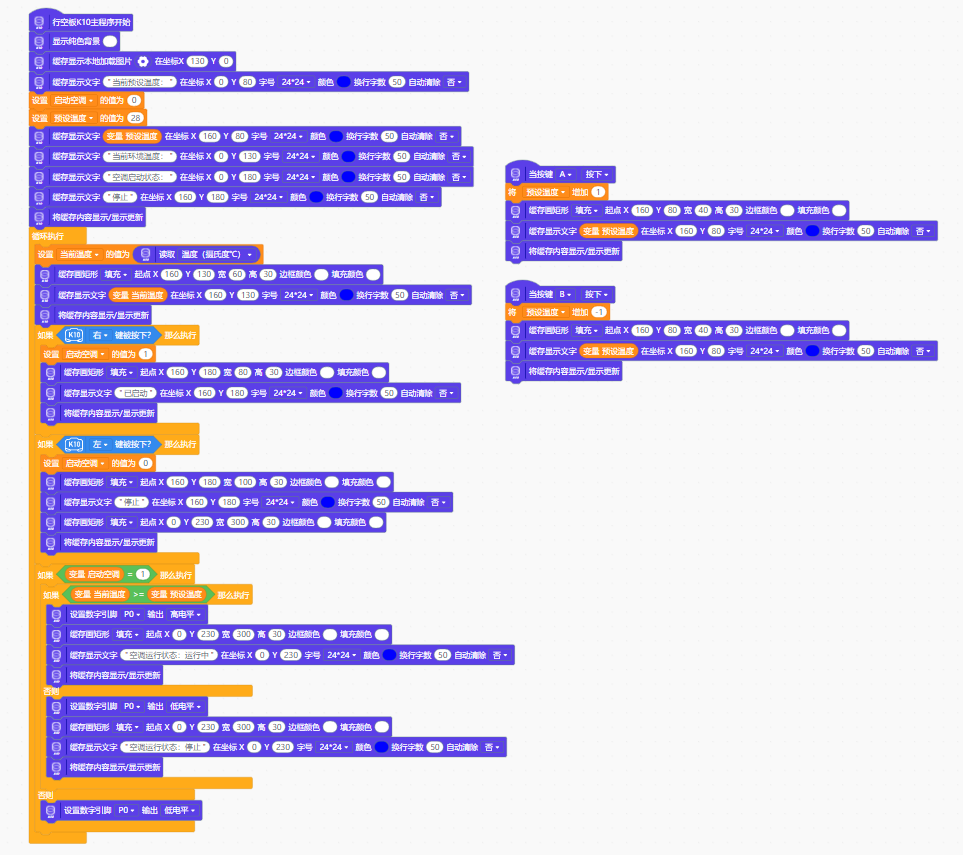
示例项目:实验盒上的上下按钮用于调节温度阈值,左右按钮用于开启或关闭空调。开始空调后,空调会自动判断当前的温度与温度阈值的大小,当当前温度大于预设温度时,空调自动开启(风扇转动);否则,空调关闭。
示例程序:
示例效果:

更多综合案例,正在更新中……