简介
这是一个树莓派4B的接线端子扩展板,采用接线端子的方式引出了树莓派的所有GPIO,在接线时能够更稳定与可靠。接线端子上方贴有彩色丝印标识,丝印清晰且不易损坏。接线端子下方,板载LED对应端子口,指示端口电平状态。
特点
- 清晰的彩色丝印
- 端口电平状态指示灯
- 引出多个GND、3.3V、5V端口
产品参数
产品尺寸图

产品外观图

技术规格
- GPIO端口数量: × 28
- 3.3V端口数量: × 4
- 5V端口数量: × 4
- GND端口数量:× 12
- 外形尺寸(不包含包装):65 × 56.5mm
- 接线端子型号:127S-3.81mm
- 丝印标识颜色数量:× 6
- 端口指示LED数量:× 32
- 端口指示LED颜色:蓝色
-可支持树莓派型号:树莓派4B、树莓派3B、树莓派Zero
说明
扩展板默认点亮CE0、CE1、SDA1、SCL1、RXD、TXD、I022、IO21、SDA0、SCL0、3.3V和5V端口

树莓派引脚说明
本产品采用BCM引脚映射标注

使用教程
1. GPIO示例
本示例使用扩展板自带的LED进行LED闪烁演示。
import time
from traceback import print_list
import RPi.GPIO as GPIO
pin_list=[4,27,21,13,26,23,22,12,20,19,24,25,16,5,6,17,18,10,9,11,8]
GPIO.setmode(GPIO.BCM)
GPIO.setup(pin_list,GPIO.OUT)
GPIO.setwarnings(False)
while True:
GPIO.outp(pin_list,GPIO.LOW)
time.sleep(0.5)
GPIO.output(pin_list,GPIO.HIGH)
time.sleep(0.5)

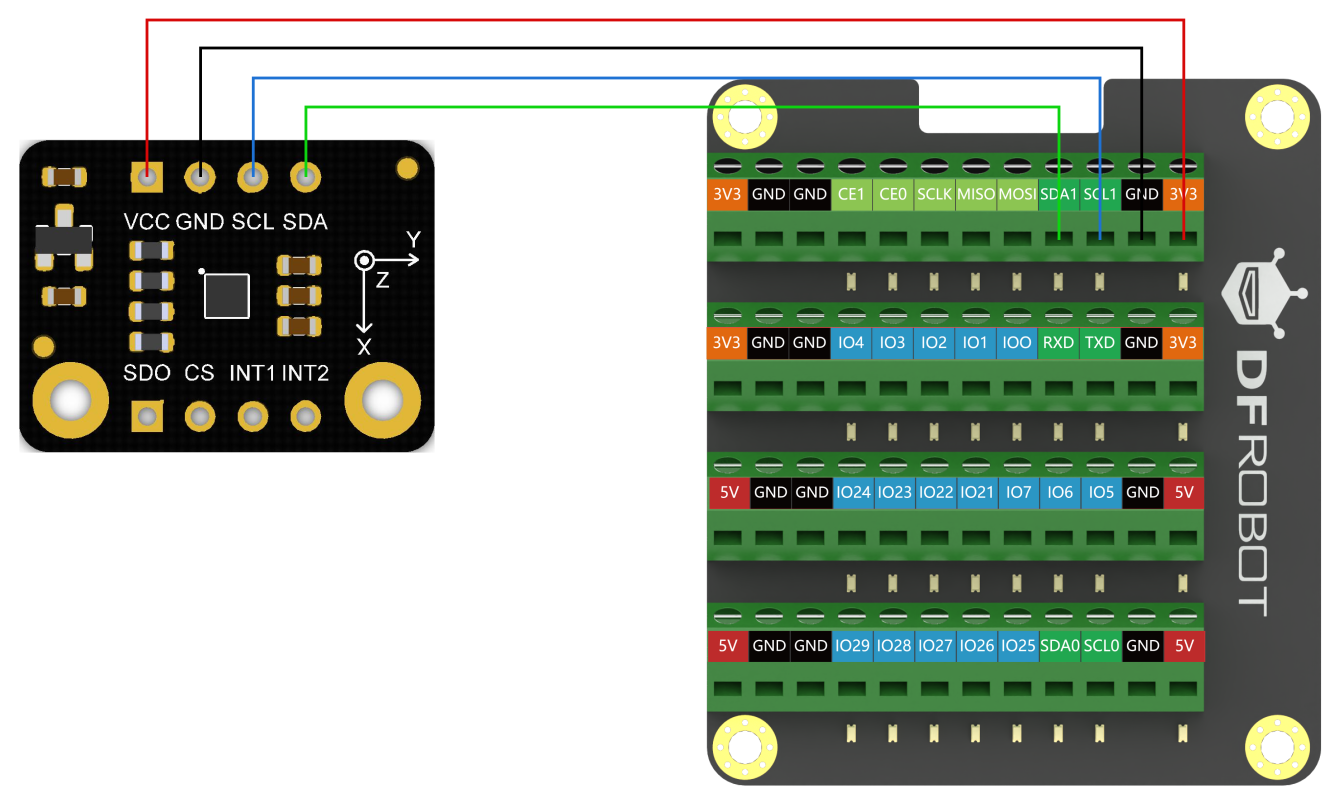
2. I2C示例
本示例使用SEN0405加速度传感器进行演示。
LIS库下载地址,加速度传感器示例程序下载。选择example > LIS2DW12文件夹中的程序。
连线示意图:
#include <DFRobot_LIS2DW12.h>
DFRobot_LIS2DW12_I2C acce;
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
acce.softReset();
acce.continRefresh(true);
acce.setDataRate(DFRobot_LIS2DW12::eRate_50hz);
acce.setRange(DFRobot_LIS2DW12::e2_g);
acce.setFilterPath(DFRobot_LIS2DW12::eLPF);
acce.setFilterBandwidth(DFRobot_LIS2DW12::eRateDiv_4);
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwrLowNoise2_14bit);
Serial.print("Acceleration:\n");
delay(100);
}
void loop(void){
Serial.print("x: ");
Serial.print(acce.readAccX());
Serial.print(" mg \ty: ");
Serial.print(acce.readAccY());
Serial.print(" mg \tz: ");
Serial.print(acce.readAccZ());
Serial.println(" mg");
delay(300);
}
结果:

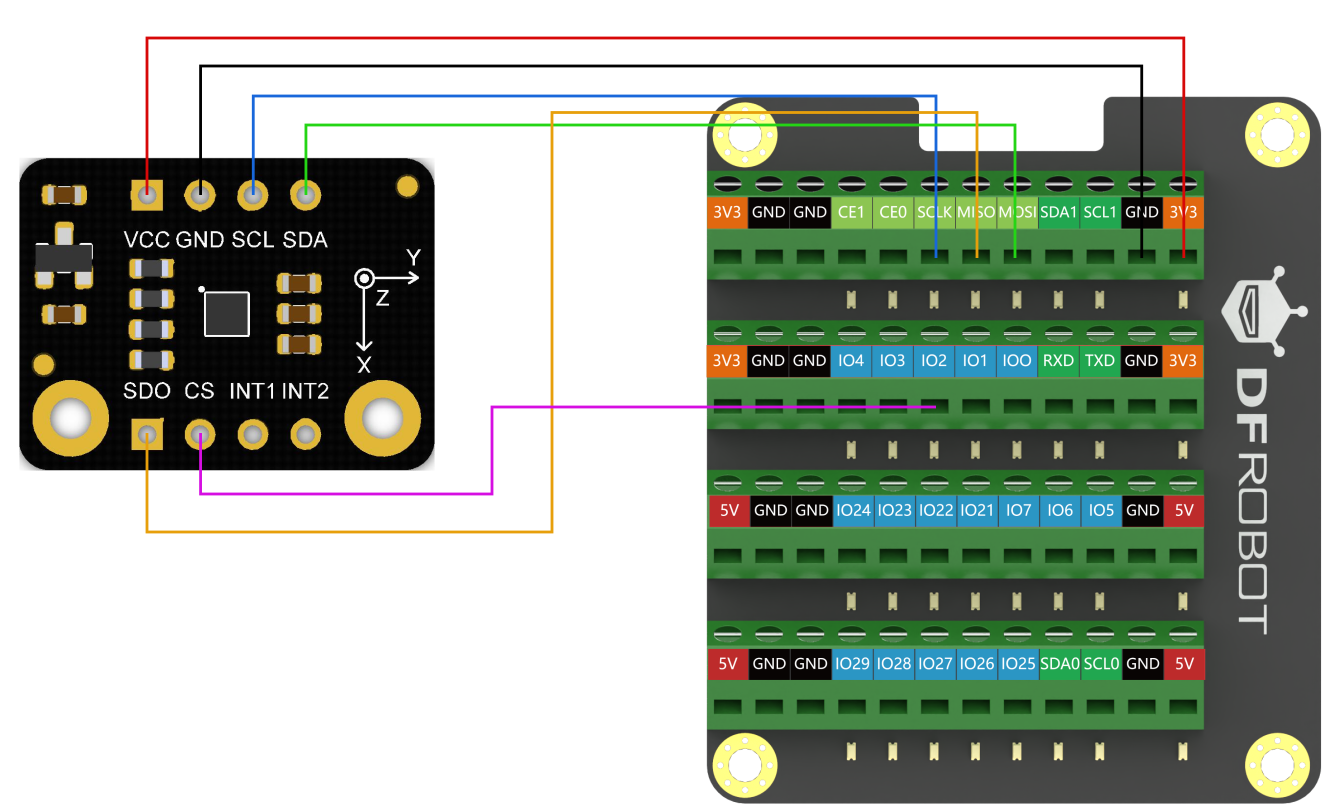
3.SPI示例
本示例使用SEN0405加速度传感器进行演示。
连线示意图:
#include <DFRobot_LIS2DW12.h>
DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
acce.softReset();
acce.continRefresh(true);
acce.setDataRate(DFRobot_LIS2DW12::eRate_50hz);
acce.setRange(DFRobot_LIS2DW12::e2_g);
acce.setFilterPath(DFRobot_LIS2DW12::eLPF);
acce.setFilterBandwidth(DFRobot_LIS2DW12::eRateDiv_4);
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwrLowNoise2_14bit);
Serial.print("Acceleration:\n");
delay(100);
}
void loop(void){
Serial.print("x: ");
Serial.print(acce.readAccX());
Serial.print(" mg \ty: ");
Serial.print(acce.readAccY());
Serial.print(" mg \tz: ");
Serial.print(acce.readAccZ());
Serial.println(" mg");
delay(300);
}
结果:

疑难解答
更多问题及有趣的应用,请访问论坛
