
概 述
HPS-3D160-U是最新一代基于 ToF 原理的高性能固态面阵激光雷达传感器,配合优化设计的照明系统和低畸变红外光学镜头,目标为 90%反射率白色物体时,最远测量距离可达到 12m。灵活的自定义敏感区域设定功能、简易自适应积分(Simple-HDR)、自适应积分(Auto-HDR)模式和超级自适应积分控制(Super-HDR)模式,使得 HPS-3D160-U可广泛应用于各种反射率场景。
HPS-3D160-U集成了大功率 850nm 红外 VCSEL发射器和高灵敏度感光器件,内置高性能处理器和先进数据处理、滤波和补偿算法,实现了非常稳定和实时的测量结果输出。全固态结构、工业级 IP67防尘防水设计和坚固的航空铝外壳使得 HPS-3D160-U可应用于各种复杂环境。
HPS-3D160-U采用USB作为数据传输使其能更方便的与主机连接,提供SDK支持Windows、Linux、ROS和树莓派。可应用于AGV避障、敏感区域防护、服务机器人避障、智能交通和车辆控制等领域。
产品特性
- 全视场帧率最高可达35fps
- 76°×32°视场角,160 x 60分辨率
- 支持16组用户自定义敏感区域设定,每组支持多个自定义敏感区域
- 接口丰富,支持USB和1组的光耦隔离GPIO接口
- 支持GPIO输入同步测量
- 最远测量距离可达12m
- 厘米级点云距离精度
- 支持Windows、Linux、ROS和树莓派
- 优异的环境光抑制能力
- 内置抗干扰算法,支持多机工作
- 全固态结构,工业级IP67防水设计
- 支持Simple-HDR模式、Auto-HDR模式和Super-HDR模式,具有良好的场景适应性
产品参数
- 工作电压:11~24V
- 功率:3~5W
- 强光性能:80,000 Lux
- 工作温度:-10 ~ 55℃
- 红外发射波长:850 nm
- 发射角度:76 °(水平)x 32 °(垂直)
- 量程:0.25~12m
- 精度:± 2cm
- 输出帧率:35Hz/可变
- 尺寸:78(长)X40(宽)X30(高)mm
- 重量:110g
接口说明
| 电缆颜色 | 信号名称 | 信号种类 | 描述 |
|---|---|---|---|
| 红 | VCC | Power | 电源,连接到DC +11 ~ 24V |
| 黑 | GND | GND | 电源地 |
| 蓝 | DATA- | Digital | TXN(-) |
| 蓝/白 | DATA+ | Digital | TXP(+) |
| 橙 | DATA- | Digital | RXN(-) |
| 橙/白 | DATA+ | Digital | RXP(+) |
| 紫 | COM | I/O | 光耦隔离I/O公共端 |
| 紫/白 | OUT | I/O | 光耦隔离I/O输出端 |
| 屏蔽层 | SHIELD | -- | 电缆屏蔽层,内部与产品外壳连接 |
使用教程
准备
-
硬件
HPS-3D160-U面阵激光雷达 ×1
树莓派4b ×1
-
软件
上位机使用
1、请给传感器接通电源并把USB接口接在电脑上。
2、在Windows电脑上下载并解压客户端
3、安装驱动,进入driver文件夹,解压en.stsw-stm32102.ZIP文件后你就可以得到驱动文件,双击你电脑对应的版本(win10请双击NDP461-KB3102438-Web文件)安指示安装即可
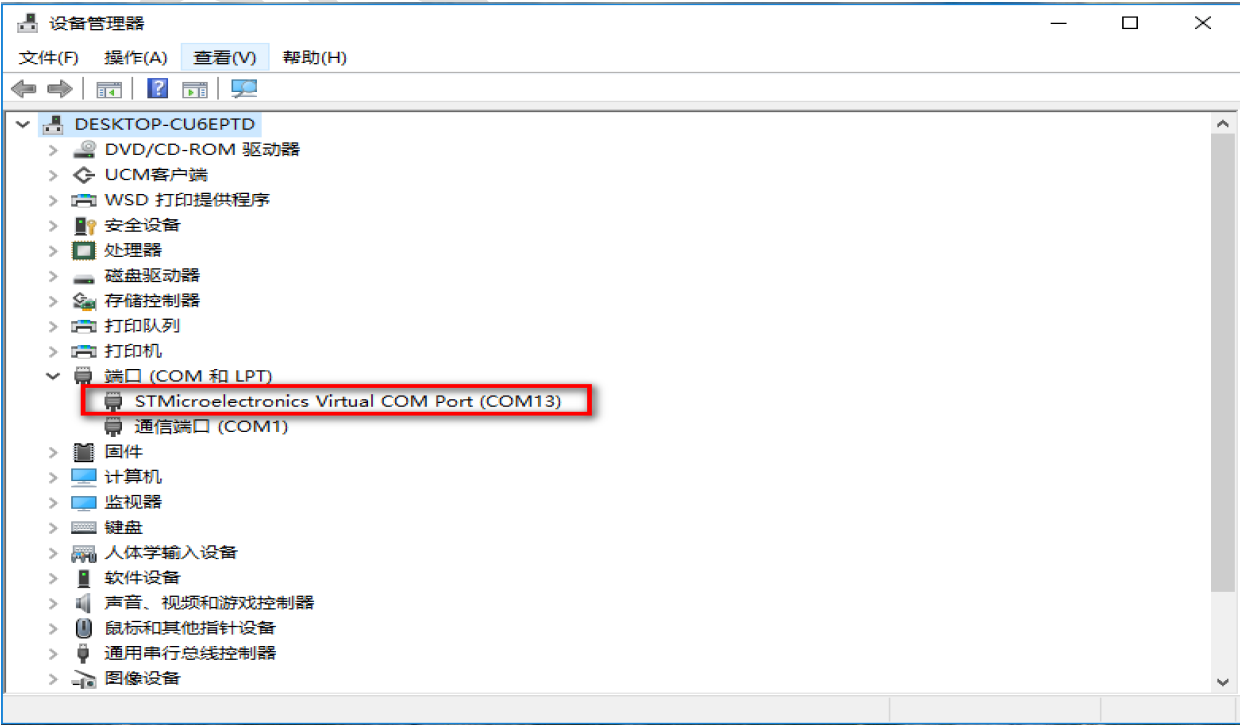
打开设备管理器 ,确认驱动是否安装完成 ,如下即为安装成功
4、进入HPS3D160_Client文件夹,双击打开HPS-3D160.exe文件
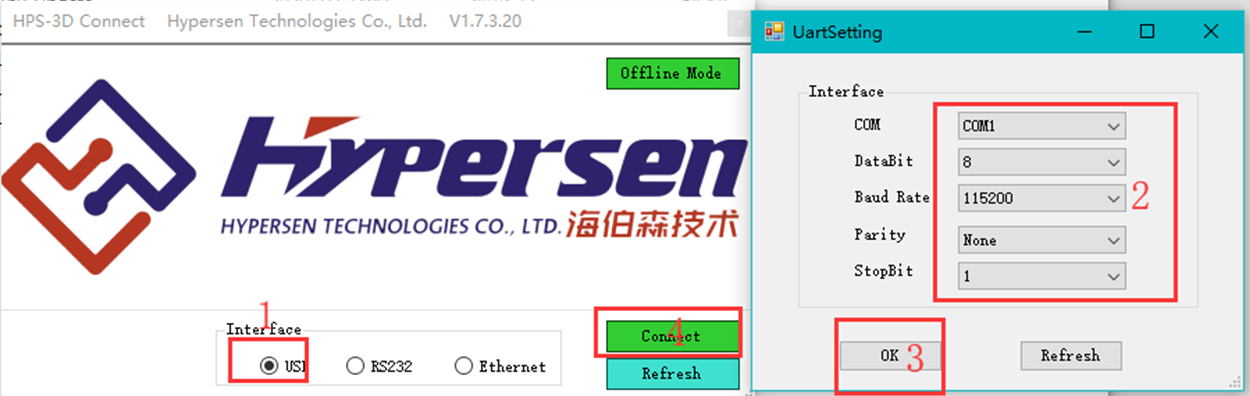
5、按下面顺序完成配置
6、进入到上位机主界面
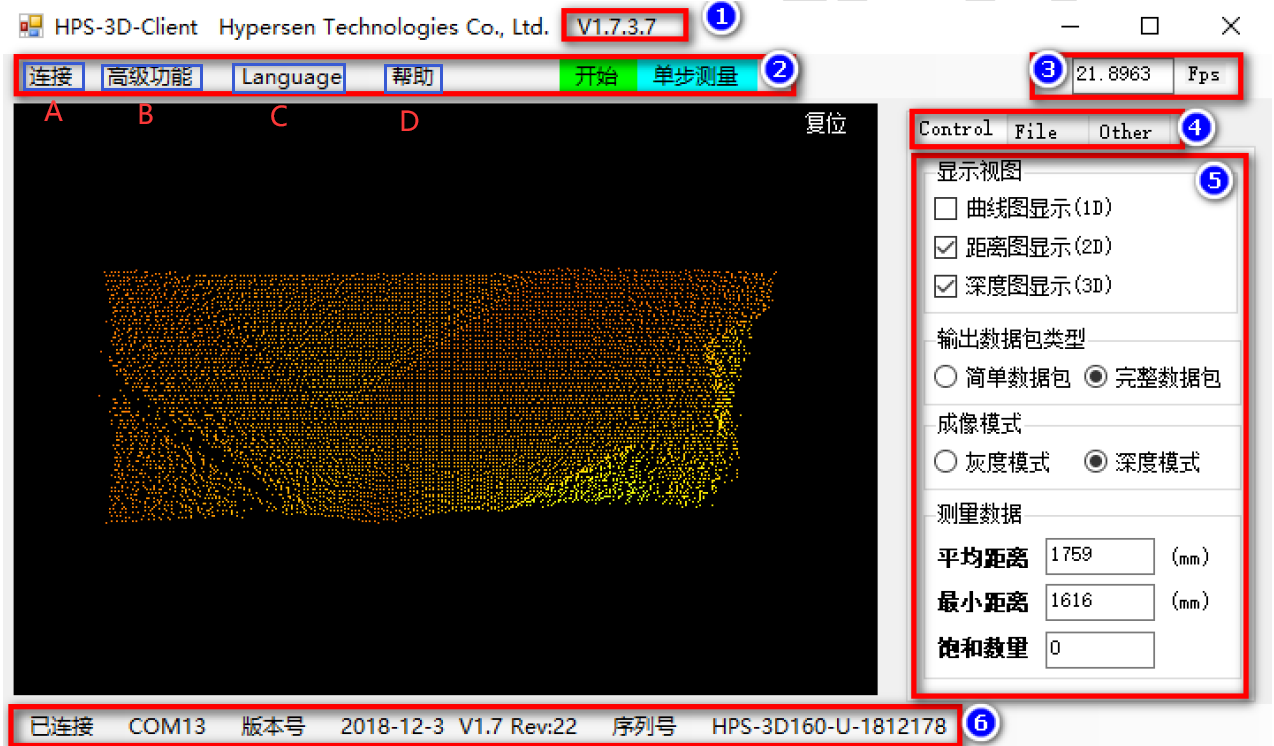
(1)客户端软件版本号
(2)菜单栏
- A、连接 :设备的连接与断开
- B、高级功能设定选项卡 :包含以下功能 :保存用户配置 、 恢复出厂设置 、保存客户端配置 、加载客户端配置 、 边缘噪声滤除 、 波特率重置 、敏感区域设置以及高级功能设定等
- C、中英文切换选项卡
- D、帮助选项卡:主要包含固件升级、 客户端软件版本号及设备信息等
(3)帧率显示
(4)控制选项卡:包含视图选择文件保存以及其他功能主要是障碍物提取
(5)显示视图控制
- 包含1D曲线图显示、2D距离图显示、3D深度图显示
- 输出数据包选择:简单数据包(不包含深度信息)及完整数据包(包含单个像素点深度信息)
- 成像模式 :灰度模式(仅显示灰度信号幅值不包含测量距离值)与深度模式(测量距离结果值);测量数据显示 :平均距离,最小距离、饱和数量显示;
(6)设备连接成功菜单栏:包含当前连接状态、连接端口号、当前设备版本号、及设备序列号
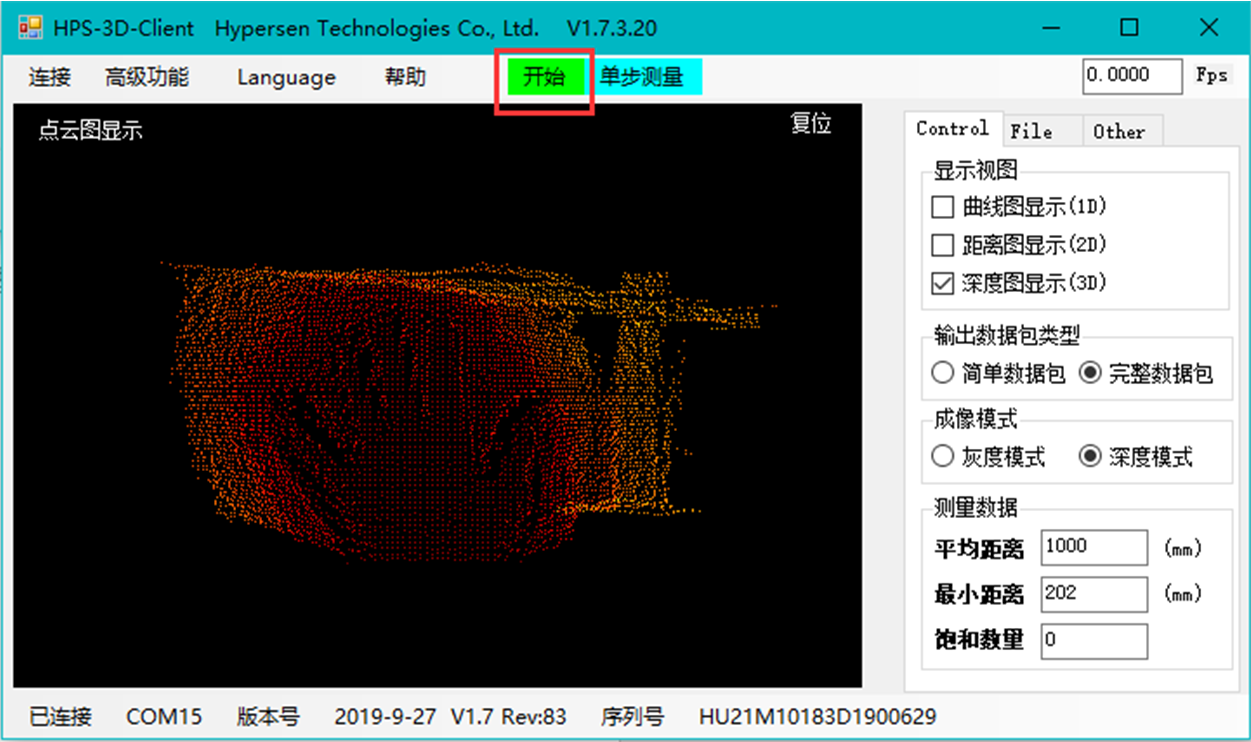
7、点击开始就可以看到点云数据了可以看到探测范围内的物理轮廓,用鼠标拖动点云图像可以改变视角。滚动滑轮能放大缩小
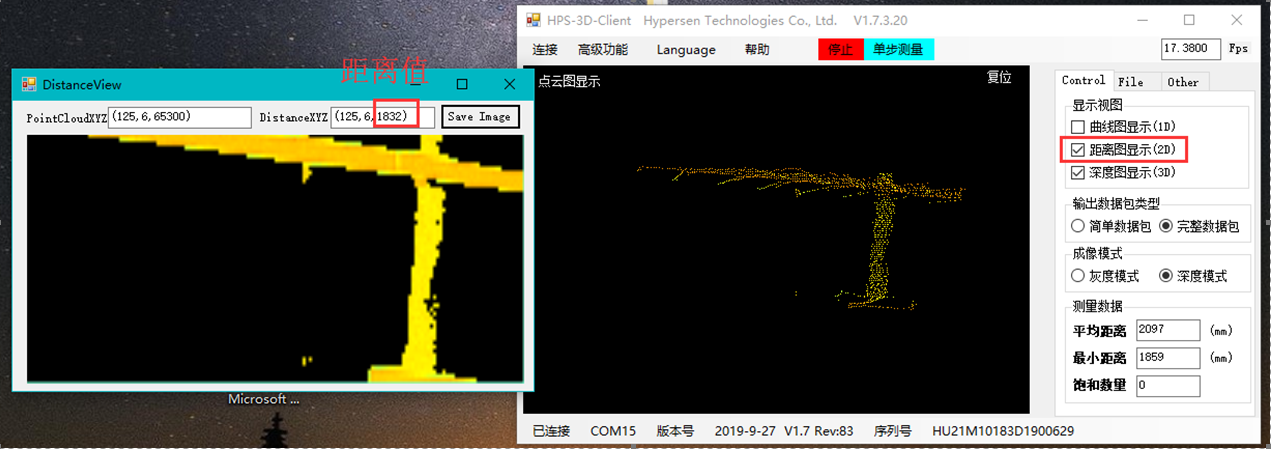
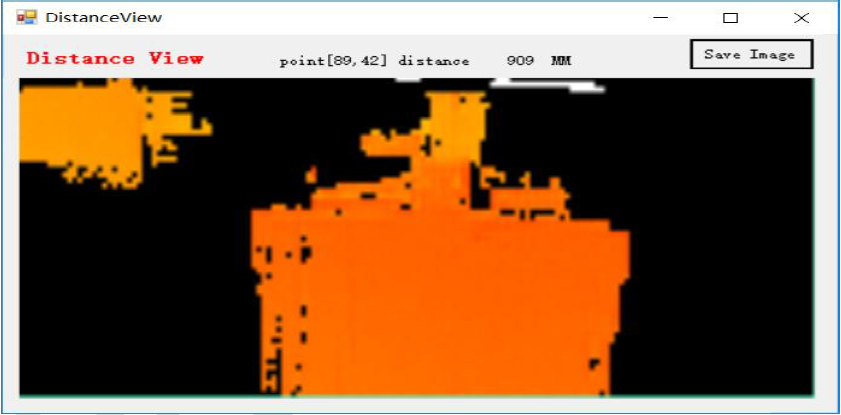
8、2D距离图:像素点饱和值65400及65500显示为白色,信号幅值低值65300显示为黑色,无效测距值65530显示为黑色,其余显示按照 距离值(小-大)由红到蓝显示
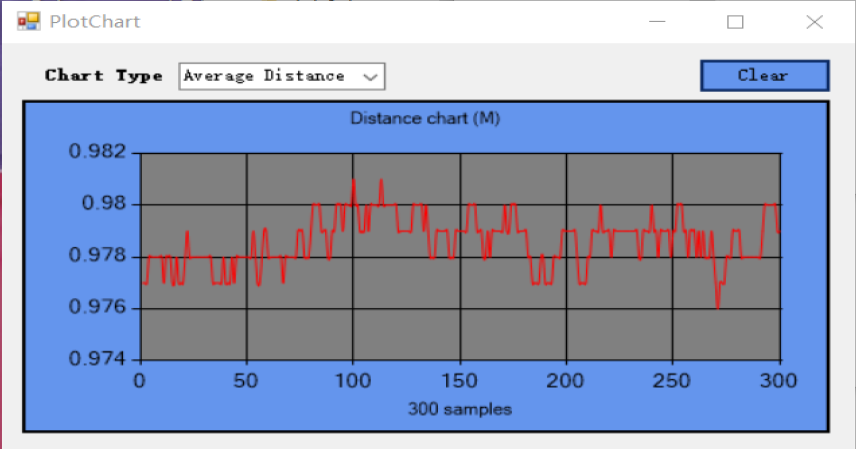
9、1D曲线图:可绘制平均距离、最小距离、以及单个像素点、点云XYZ坐标曲线图
10、成像模式选择:灰度模式下无法测距,仅保留信号幅值深度模式下是测距模式;
11、文件选项卡 (File):主要是将数据记录并保存到文件中用于分析,也包含数据回放功能;
12、其他功能 O ther )):主要包含的是障碍物提取参数设置及数据显示障碍物提取效果如下所示:
功能参数描述:
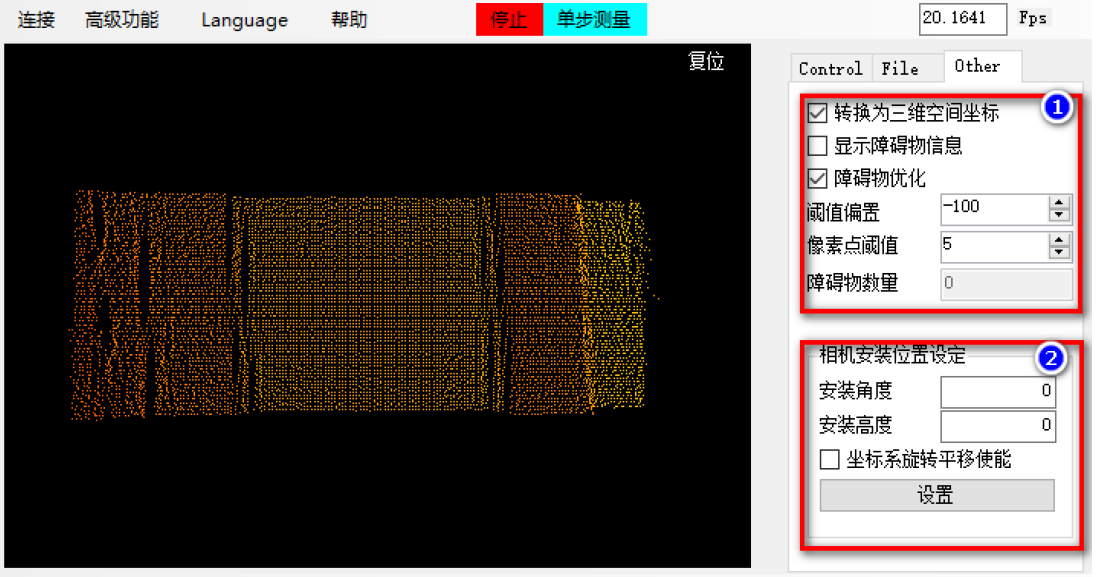
- 转换为三维空间坐标:将输出的距离数据转换为相应的点云空间坐标信息
- 显示障碍物信息 :提取当前环境下障碍物信息
- 障碍物优化处理 :对障碍物离散像素点进行优化
- 距离偏置:提取障碍物区分前景与背景的最小距离阈值
- 像素点阈值:提取像素点数高于此阈值的障碍物
- 障碍物数量:显示当前提取到的障碍物的个数
雷达安装位置设定:通过设置雷达的安装角度与高度可将传感器测量距离值转换为被测物到传感器水平方向距离值;使能点云坐标旋转平移,可将有一定安装角度的雷达世界坐标系转换为与我们思维逻辑 一致的世界坐标系,从而进行数据的分析与处理
13、敏感区域功能介绍:目前客户端软件支持多组用户自定义敏感区域,每组支持多个自定义敏感区域,可以通过设定多个不同的敏感区域进行组合,来满足我们实际应用场景中的需求。单击主界面上的敏感区域设置按钮,进入到敏感区域设置主界面,如下图所示:
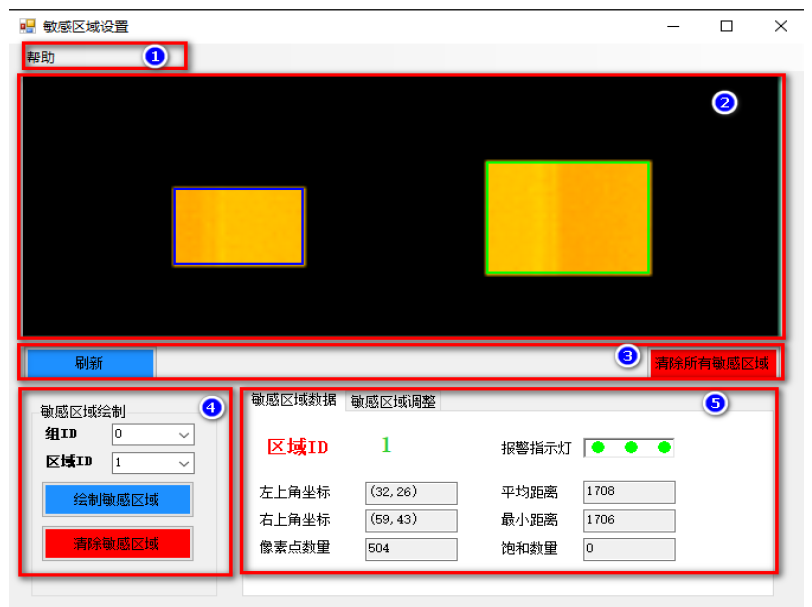
(1) 帮助:包含敏感区域参数解释以及设置步骤等简单说明
(2) 距离图像显示界面 :彩色距离图像显示以及敏感矩形区域绘制及设定部分;
(3) 刷新当前显示界面和清除当前敏感区域分组(组ID) 下的所有自定义敏感区域;
(4) 敏感 区域绘制:目前该客户端软件支持16组用户自定义敏感区域,每组支持多个不重叠的敏感区域,详细绘制步骤请参下文;
(5) 敏感区域数据框:该区域是用于显示当前区域内的简单数据,通过移动鼠标到所绘制的敏感区域内,在该区域则会显示当前ID以及其简单数据包内容;其中报警指示灯对应于 三段阈值报警输出状态位bit0 bit1 bit2
- 敏感区域调整 :可将手动绘制好的敏感区域进行微调处理,包含平移及缩放
敏感区域设定步骤
第一步,在敏感区域主界面④区域内选择组ID0~15
第二步,选择区域ID编号
第二步,单击绘制敏感区域按钮,然后在显示区域内用鼠标由左上往右下拖动鼠标进行敏感区域绘制矩形,每绘制完成后如需再次绘制需要重新单击绘制按钮
第三步,在所绘制的敏感区域内单击鼠标对该区域进行报警参数设定等,设定界面如下:
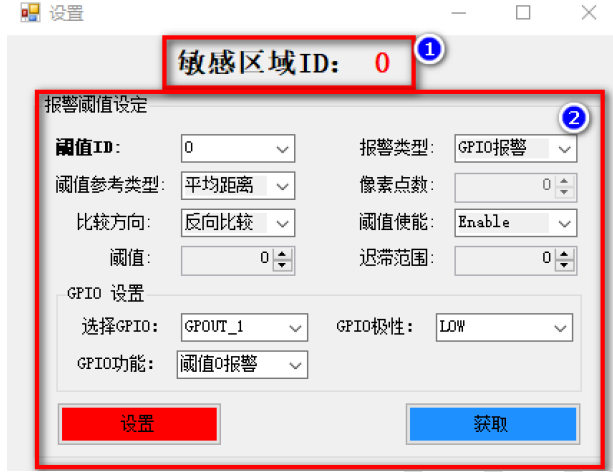
(1) 显示当前设置的敏感区域ID编号
(2) 报警阈值设定:目前客户端软件支持三段阈值设定阈值ID范围是0~2设定
步骤如下:
- 选择阈值ID,通过ID切换分别对三段阈值参数进行设定步骤
- 选择阈值参考 类型,该参考类型表示阈值的数据类型,设置阈值与该参考类型进行比较输出注:该类型仅用于参考的数据使用,无论是最大还是最小值或者是其他的参数类型,只需要认为该类型是传感器的输出值,该值仅与阈值进行比较;当参考类型选择像素点数时像素点数参数设置才生效;
- 选择比较方向,可以选择正向比较和反向比较两种,正向表示参考值比阈值大输出警报信号,反向表示参考值比阈值小输出警报信号
- 设置阈值,该阈值设定根据选定的参考类型合理设置
- 设置报警类型,选择GPIO输出报警或者关闭报警
- 设置阈值使 能,用于单独开关某段阈值
- 设 置迟滞范围,该 值 是解决当参考类型值在阈值附近来回跳动时出现频繁报警输出的问题因此该值的设置不宜过大,否则会导致报警触发延迟;
- GPIO输出配置选择报警功能,可单独设置某段阈值报警,该参数与阈值ID组合使用注意GPIO输出为光耦无电压输出;
- 单击设置按钮进行设置保存,如需下次上电生效还需保存到用户配置
第四步,查看当前敏感区域内数据信息,将鼠标移至需要查看的敏感区域内即可。
在树莓派上使用
1、安装Python依赖库与git,树莓派需要联网。如已安装,可跳过该步骤。
在终端中,依次键入如下指令,并回车:
sudo apt-get install build-essential python-dev python-smbus git
下载github上的代码,并编译
cd Desktop
git clone https://github.com/DFRobotdl/DFR0728_HPS3D_SDK-HPS3D160_SDK-V1.8.git
cd HPS3D_SDK-HPS3D160_SDK-V1.8/V1.8/Example/HPS3D160-Raspberry-C_Demo/
make

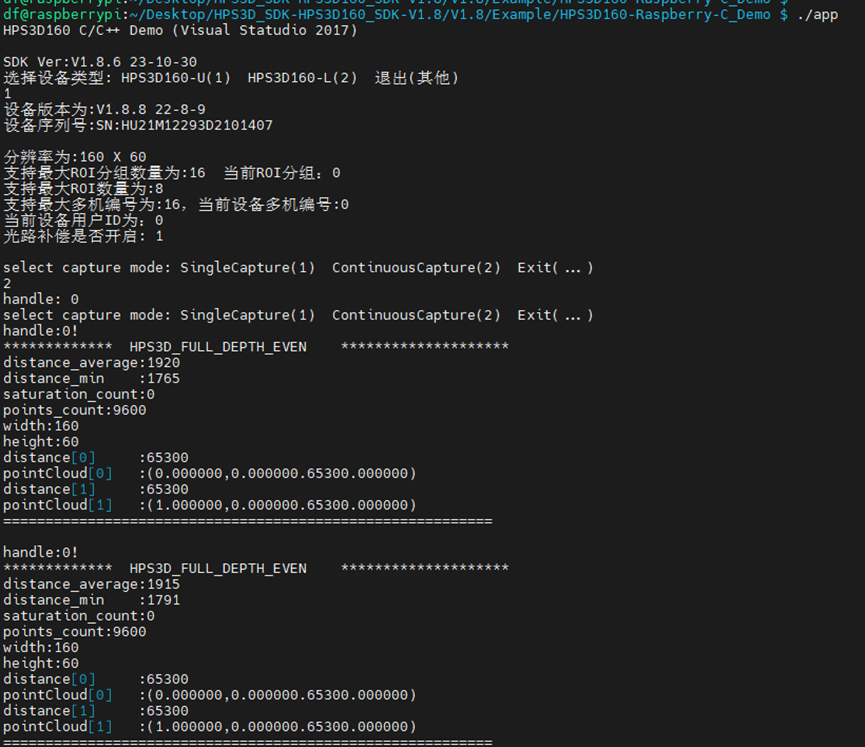
执行
./app
输入1,查看设备信息,输入2连续测量
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖