简介
PT100适用于大部分400℃以下高温的测量,但是通常家用天然气灶焰芯温度可达800℃以上,烧制陶瓷的窖子或者大功率电炉温度更可超过1000℃,在这些超高温度的场景下就需要用到K型热电偶。
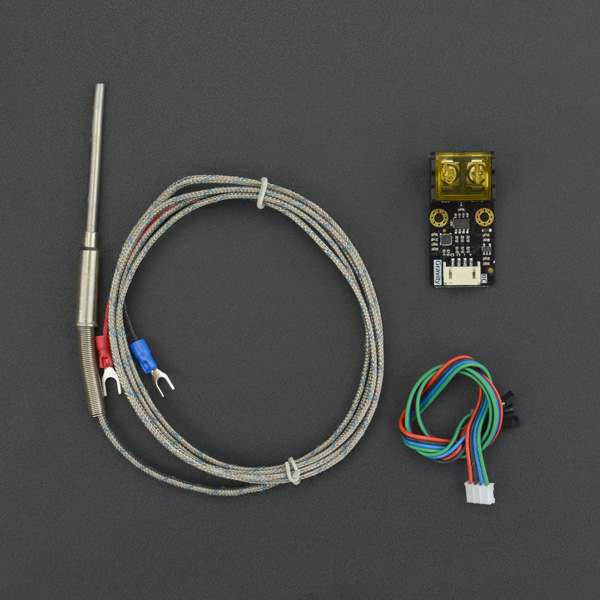
数字K型高温传感器由信号放大转换模块和铠装K型热电偶探头组成,当K型热电偶探头置于高温热源时,探头两端由于热电效应产生一个与温度呈正比的微弱电压,信号放大转换模块采用MAX31855K专用芯片将这个微弱的电压信号进行放大、模数转换与相应补偿,最终通过Gravity I2C接口向主控器发送探头的测量温度。信号放大转换模块最大可测量极宽的温度范围-270℃~1372℃,在-200℃~700℃误差不超过±2℃,700℃~1350℃误差不超过±4℃,配套的铠装K型热电偶探头测温可达800℃,在量程范围内误差不大于±2.5℃,能够满足大部分400度以上超高温度的测量场景。
特性
- 14位,0.25℃数字高分辨率测温
- 极宽测温度范围
- 兼容3.3V/5V控制器
- Gravity I2C接口,连接方便
- 适配任何K型热电偶探头
技术规格
信号放大转换模块
- 输入电压(VCC):3.3V~5.5V
- 适配探头:K型热电偶探头
- 测温范围:-270℃~1372℃
- 测温分辨率:0.25℃
- 测温误差:≤±2℃(-200℃~700℃) ~ ±4℃(700℃~1350℃)
- 通信接口:Gravity I2C (逻辑电平0-3.3V)
- 产品尺寸:44.0mm*22.0mm
铠装K型热电偶探头
- 测温范围:0℃ ~ 800℃
- 测温误差:≤±2.5℃
- 线长:1.5m(金属屏蔽线)
- 探头长度:50mm
- 探头直径:Φ4mm
- 特性:防水、耐腐蚀(耐弱酸弱碱,防锈)、耐高温
应用场景
- 电烤箱、大功率电炉
- 高温火焰、气体
- 陶瓷窖
接口说明

| 标号 | 名称 | 功能描述 |
|---|---|---|
| 1 | VCC | 电源正极(3.3~5.5V) |
| 2 | GND | 电源负极 |
| 3 | SCL | I2C时钟线 |
| 4 | SDA | I2C数据线 |
| 5 | BLUE- | K型热电偶负极 |
| 6 | +RED | K型热电偶正极 |
引脚说明
Arduino使用教程
准备
- 硬件
- Arduino UNO控制板(或类似控制板) x 1
- 数字K型高温传感模块 x 1
- 铠装K型热电偶探头 x 1
- Gravity 4P传感器连接线(或若干杜邦线) x 1
- 软件
- Arduino IDE (1.0.x或1.8.x), 点击下载Arduino IDE
- DFRobot MAX31855库,点击下载MAX31855库
连线图

读取温度
- 将模块、探头与Arduino按照连线图相连。I2C地址为固定的0x10,无需修改。
- 安装DFRobot MAX31855库。如何安装库?
- 打开Arduino IDE,将下面的代码上传到Arduino UNO。
- 打开Arduino IDE的串口监控视器。
/*!
* @file readTemp.ino
* @brief Get probe temperature
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author PengKaixing(kaixing.peng@dfrobot.com)
* @version V1.0.0
* @date 2022-04-01
* @url https://github.com/DFRobot/DFRobot_MAX31855
*/
#include <DFRobot_MAX31855.h>
#include <Wire.h>
DFRobot_MAX31855 max31855(&Wire, 0x10);
void setup()
{
/*Set baudrate*/
Serial.begin(9600);
max31855.begin();
}
void loop()
{
int stat;
/*Read Celsius*/
float temp = max31855.readCelsius();
Serial.print("Temperature:");
Serial.print(temp);
Serial.println(" C");
delay(1000);
}
结果
- Arduino每隔1s向串口打印K型热电偶探头当前温度。

树莓派教程
准备
- 硬件
- 树莓派3代B型(或类似)主控板 x 1
- 数字K型高温传感模块 x 1
- 铠装K型热电偶探头 x 1
- Gravity 4P传感器连接线(或若干杜邦线) x 1
接线图

安装驱动
1.启动树莓派的I2C接口。如已开启,可跳过该步骤。
打开终端(Terminal),键入如下指令,并回车:
pi@raspberrypi:~ $ sudo raspi-config
然后用上下键选择“ 5 Interfacing Options ”, 按回车进入,选择 “ P5 I2C ”, 按回车确认“ YES ”即可。重启树莓派主控板。
2.安装Python依赖库与git,树莓派需要联网。如已安装,可跳过该步骤。
在终端中,依次键入如下指令,并回车:
pi@raspberrypi:~ $ sudo apt-get update
pi@raspberrypi:~ $ sudo pip install wiringpi
3.下载驱动库,并运行。 在终端中,依次键入如下指令,并回车:
pi@raspberrypi:~ $ git clonehttps://github.com/DFRobot/DFRobot_MAX31855.git
pi@raspberrypi:~ $ cd ~/DFRobot_MAX31855/RaspberryPi/python
pi@raspberrypi:~/DFRobot_MAX31855/RaspberryPi $ sudo python DFRobot_MAX31855.py
读取温度
- 将模块、探头与树莓派按照连线图相连。I2C地址为固定的0x10,无需修改。
- 在终端中,依次键入如下指令并回车,运行样例代码:
pi@raspberrypi:~/DFRobot_MAX31855/RaspberryPi/python $ cd readTemp
pi@raspberrypi:~/DFRobot_MAX31855/RaspbeeryPi/python/readTemp $ sudo python readTemp.py
结果
-
程序每隔1s测量并打印一次K型热电偶探头当前温度。
-

常见问题
Q1.为什么会出现温度越高读数越低的情况,甚至还出现了负温度?
- A. 可能为探头正负极连接相反,尝试将探头正负接头交换。
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
