一、概述
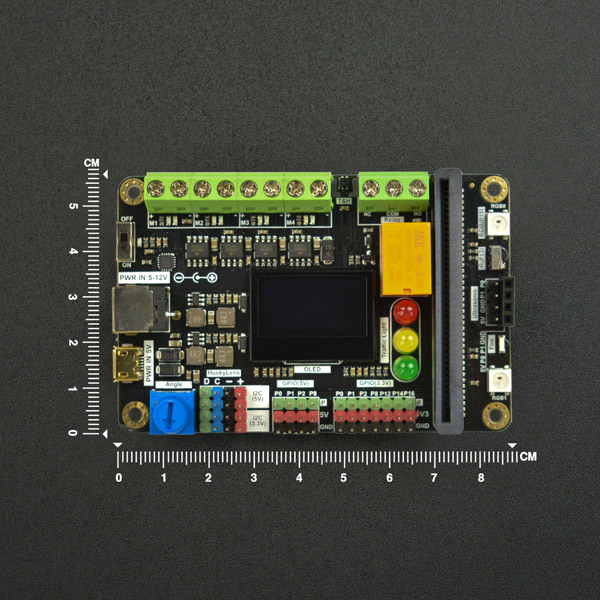
这是一款基于microbit V2开发的多功能编程教育扩展板。在57mm*87mm的板上,紧凑的集成了10多项功能模组。学校可用极低的采购成本即可完成microbit全部的基础教学内容。
并且,紧凑的布局、四路电机驱动、外接电源的设计方式,可让学生在学习完基础内容后,还可扩展到机器人小车的学习、麦克纳姆轮机器人的控制等学习领域。
二、技术规格
- 工作电压:5V(USB)
- 外接电源:5V~12V(开关仅控制外接电源)
- 红外接收传感器(P13) ×1
- W2812RGB灯(P15) ×2 (RGB0 RGB1)
- 继电器模块(I2C) ×1 (板载吸合与断开指示灯)
- 红外火焰传感器(I2C) ×1
- 温湿度传感器(I2C) ×1
- 旋转角度传感器(I2C) ×1
- 红黄绿交通灯模块(I2C) ×1
- 12864_OLED显示屏(I2C) ×1 (带黑色金属保护罩)
- 电机驱动(I2C) ×4 (板载正反转两色指示灯)
- 电机驱动电压:5V
- GPIO(5V ) : P0 P1 P2 P8 (外部电源,具有更强的驱动能力)
- GPIO(3.3V ): P0 P1 P2 P8 P12 P14 P16 (microbit主板内部电源)
- I2C扩展口(3.3V) ×2
- HuskyLens接口(5V I2C ) ×2 (外部电源,具有更强的驱动能力)
- SR04超声波接口:×1 (5V P0 P1 GND)
- URM10超声波接口:×1 (5V P0 P1 GND)
- 尺寸:57mm*87mm
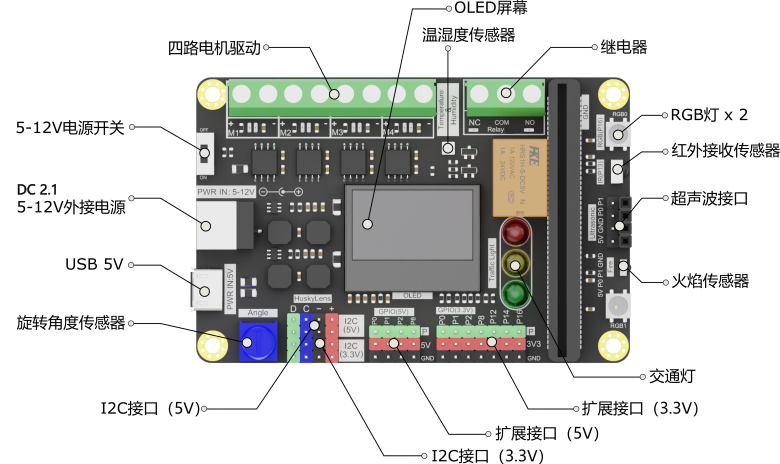
三、功能指示图
四、两种供电方式的区别
- USB供电:USB供电电压为5V,可使用电脑USB供电或者手机充电头供电,此时,板载的开关是不起作用的。此供电方式主要方便课堂教学。但USB供电的电流有限,很难驱动多个电机或者舵机。
- 外接供电:在USB供电口的旁边,设置了外接供电口,供电电压为5V~12V 。板载的电源开关起作用。该供电方式主要用于多个驱动电机和舵机。可以用于制作机器人小车,舵机机器人等场景。使用多节锂电池进行供电。接入电源时请注意区分正负极,避免损坏主板。不论外接电压为多少,电机端的电压始终稳压在5V。
五、扩展IO口的区别
- GPIO(3.3V):3.3V的IO口电源是从microbit主板引出,故驱动的电流较小,适合接入小功率的传感器和执行器。
- GPIO(5V):5V的IO口电源是直接接的电源,具有较强的驱动能力。适合驱动舵机等大功率外设。并且适合一些只能5V供电的传感器。
- I2C(3.3V):3.3V的IO口电源是从microbit主板引出,故驱动的电流较小,适合接入小功率的传感器和执行器。
- I2C(5V):5V的IO口电源是直接接的电源,具有较强的驱动能力。适合驱动AI摄像头等大功率外设。并且适合一些只能5V供电的传感器。
六、使用教程(Mind+)
1、下载及安装软件(版本不低于V1.7.1)。下载地址:http://mindplus.cc 详细教程:安装教程
2、切换到“上传模式”。

3、“扩展”中选择“主控板”中的“micro:bit”。扩展板中选择虾米扩展板加载扩展库。
 |
 |
|---|---|
| 主控板中选择micro:bit | 扩展板中选择虾米扩展板 |
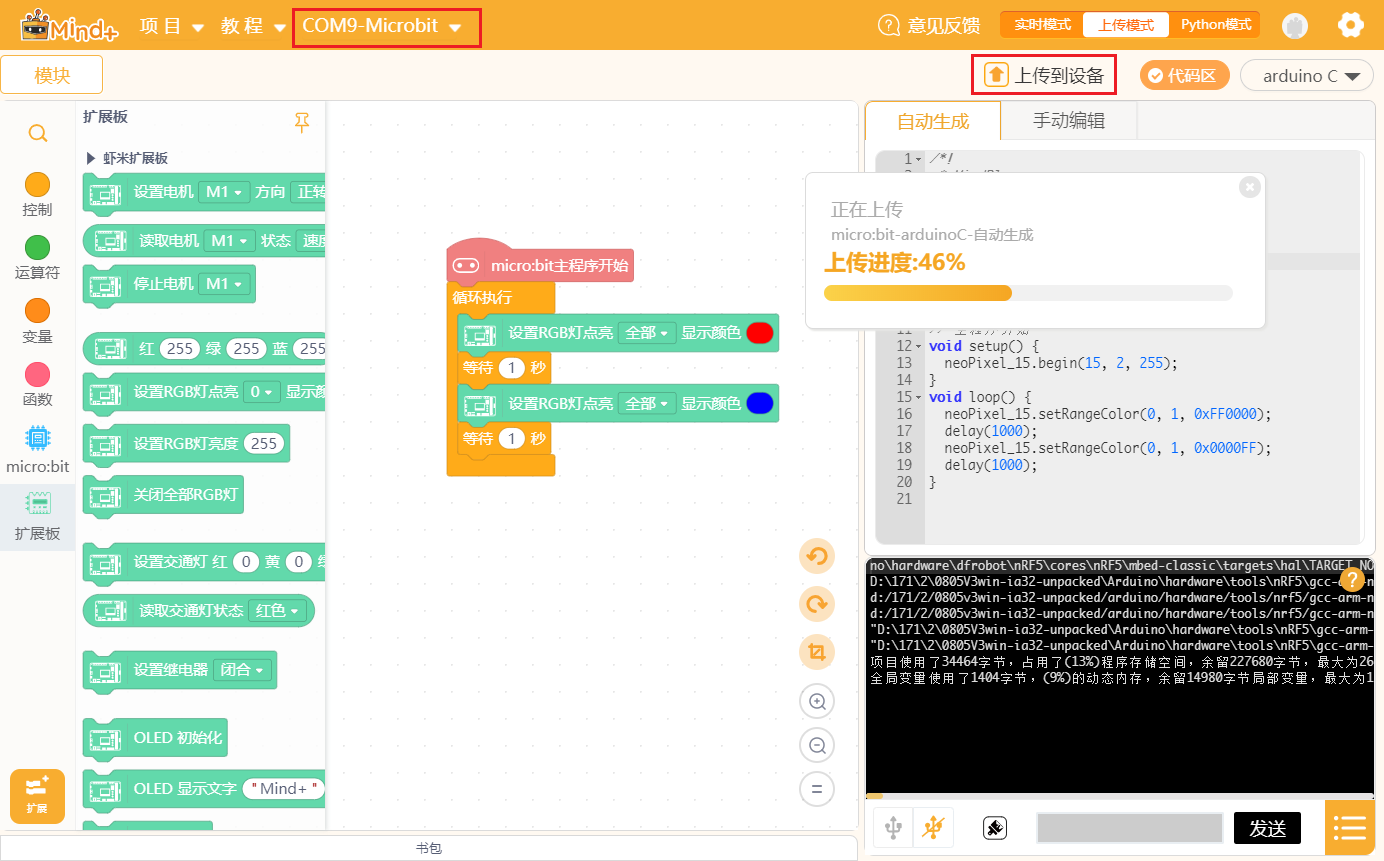
4、编写程序,选择主控板端口号,上传程序。
七、使用教程(MakeCode)
1、在浏览器输入网址打开MakeCode编程平台:https://makecode.microbit.org/
2、新建项目并为项目命名。
3、载入xia_mi board的程序库:依次点击 “设置”、“扩展”,然后在搜索框中粘贴链接:https://github.com/DFRobot/pxt-DFRobot_xia_mi_Board
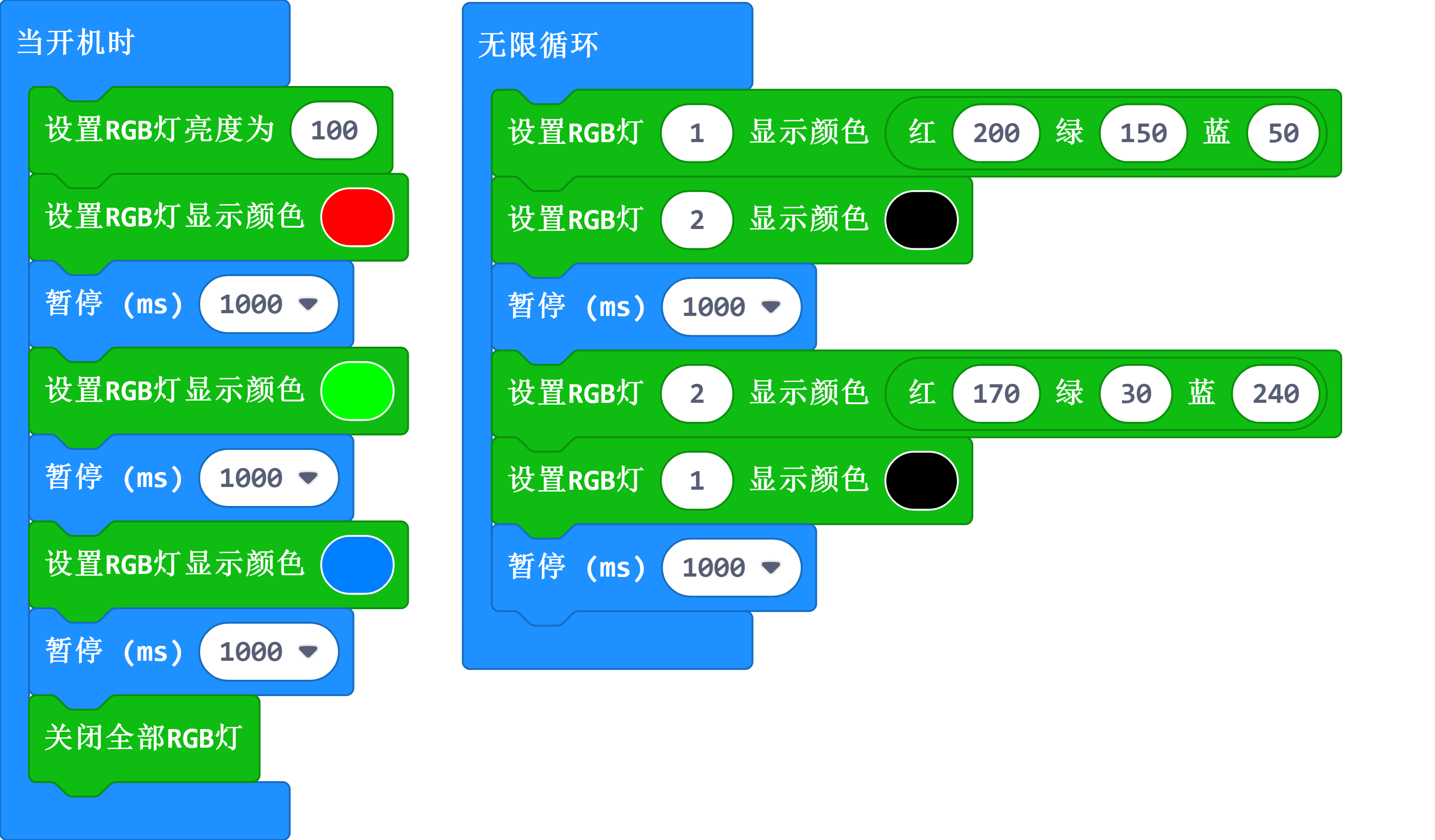
1、点亮RGB灯
本例程中,让两个RGB灯轮流切换三种颜色。
MakeCode程序链接:https://makecode.microbit.org/_FJt7rr78WMKC
2、交通信号灯
本例中,交通灯红灯亮30秒,黄灯亮2秒,绿灯亮30秒,循环执行。
MakeCode程序链接:https://makecode.microbit.org/_Cy4KY3Pi6bW8

3、环境温湿度计
本例中,读取温度和湿度的值,并在OLED显示屏上显示。
MakeCode程序链接: https://makecode.microbit.org/_K7y2TtVvMio7

4、角度传感器控制舵机
本例中,在P0口接入一个9g舵机,使用旋转角度传感器控制舵机的角度。并且在屏幕上实时显示旋钮的位置和舵机的角度。
MakeCode程序链接:https://makecode.microbit.org/_TVmLvAXTq2v5

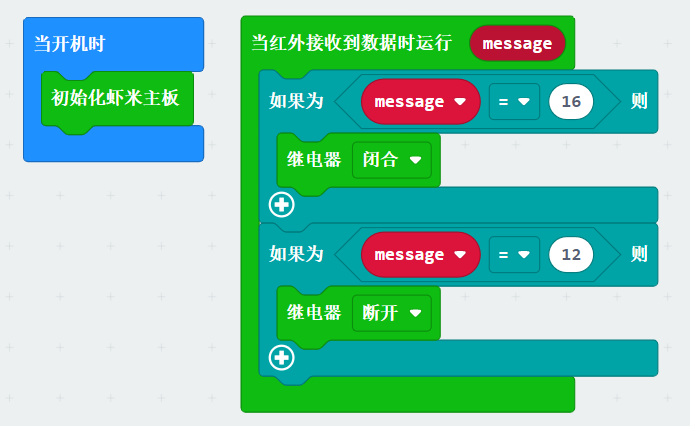
5、红外遥控继电器开关
本例中,使用迷你红外遥控器对继电器进行控制,当按下遥控器的1键,继电器吸合,按下0键,继电器释放。对应的继电器指示灯自动会切换。
红外遥控器及对应的键值:

MakeCode程序链接:https://makecode.microbit.org/_FEt27cb1qLar
6、火焰报警器
本例中,需要使用到打火机,请注意用火安全。在火焰传感器前方约20cm左右打开打火机,显示屏会显示当前的火焰强度值,如果超过200的话,蜂鸣器就开始报警。低于200停止报警。因为红外火焰传感器对日光也有一定的感应,所以默认有几十的值。光线越强,值越大,这是正常现象。但红外火焰传感器对火焰的波长更加敏感。
MakeCode程序链接: https://makecode.microbit.org/_HAJPpYYfW6hq


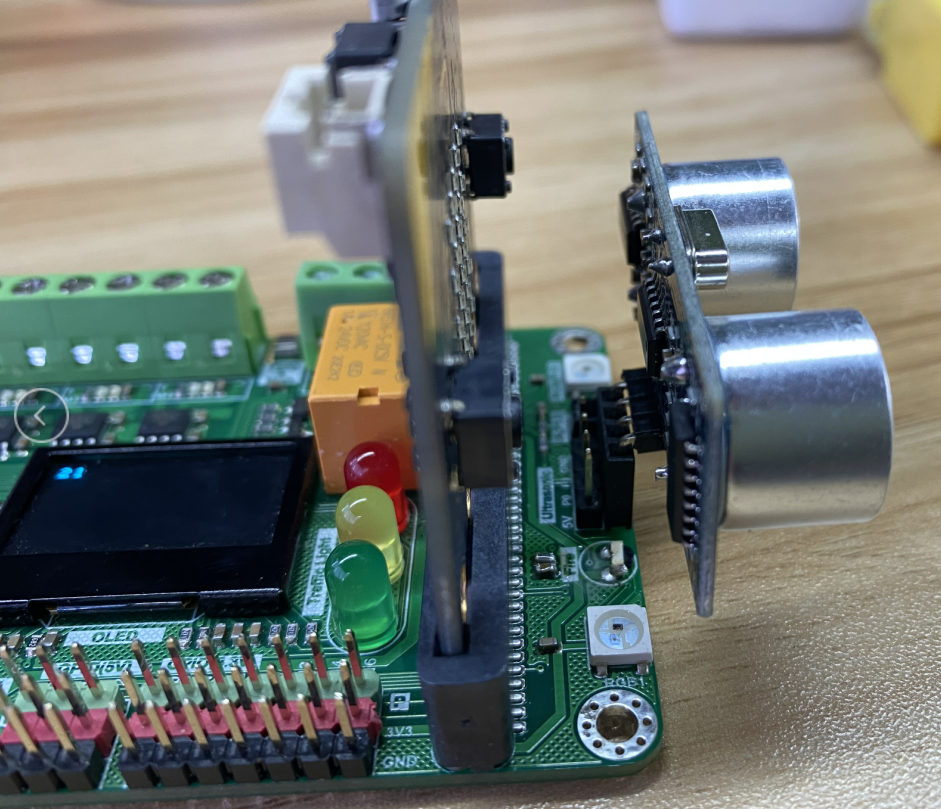
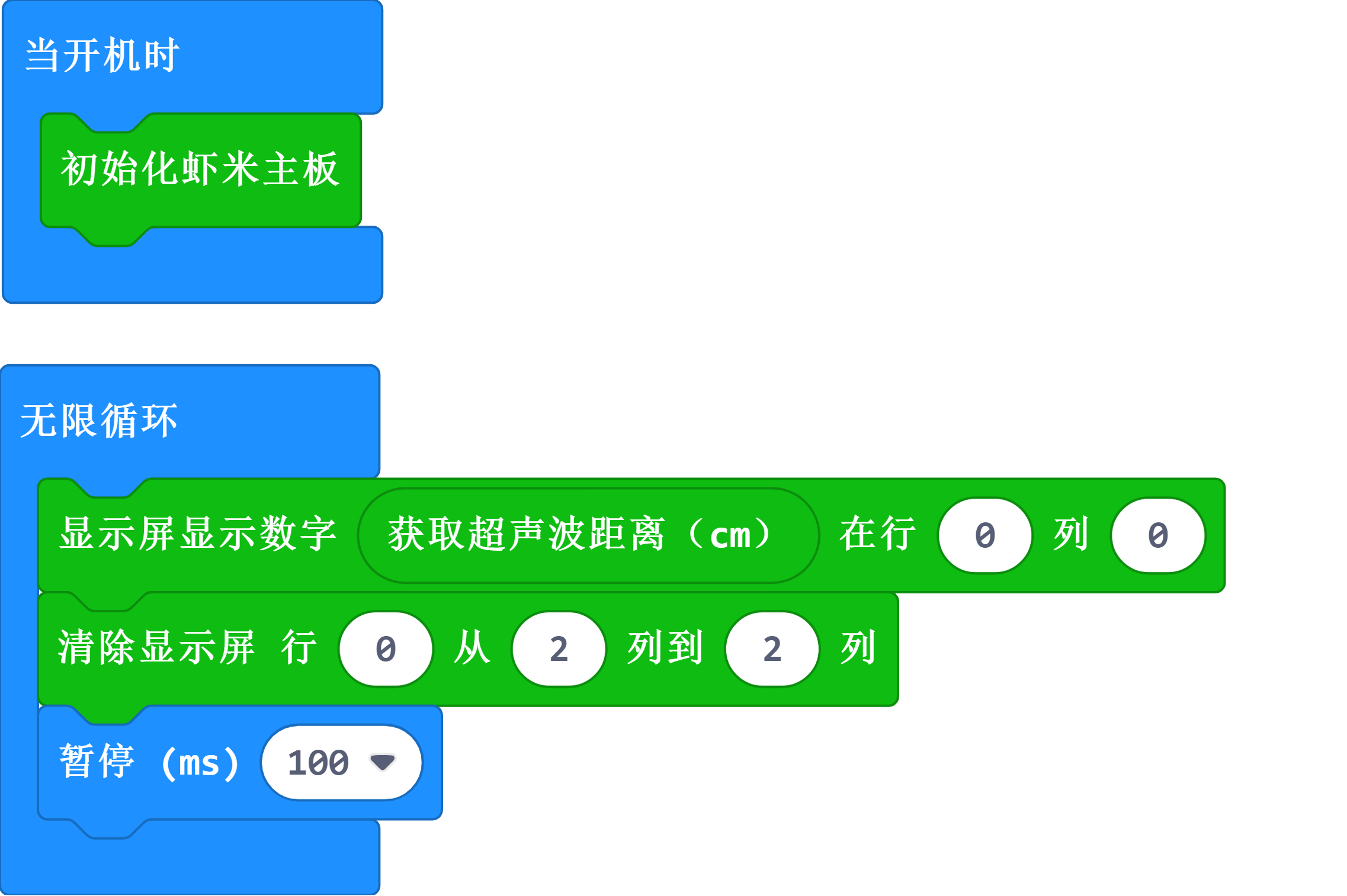
7、SR04超声波测距
此例程将使用SR04超声波模块,此模块未包含在产品中,需另外购买。将SR04超声波传感器插入接口(如下图),并且把测量的距离显示在OLED屏幕上。
MakeCode程序链接: https://makecode.microbit.org/_0K01rcdXf0y1
8、四路电机驱动
本产品板载了4路电机驱动,可做为麦克纳姆轮机器人平台控制板。本例中驱动4个电机,实现正反转。演示电机驱动的使用方法。
MakeCode程序链接:https://makecode.microbit.org/_eR62rrYvCfyo

八、配送清单
SKU_MBT0042 xiami board for microbit ×1
 购买
购买