
概 述
USB GPS接收器
这是一款体积小巧,轻薄便携式的完整卫星信号接收机。内置卫星接收天线,和传统接收机相比较它具有信号更强、定位更快等优点。产品采用高精度的定位芯片件及工业级制造工艺,故能满足工业级的定位需求和个人使用需求。内置电池用以存储卫星资料,如卫星讯号状态、最后位置及时间,方便快速的增加下一次开机时的定位速度。采用USB接口能在树莓派,英伟达,LP上使用。可适用于车载导航、手持定位、可穿戴设备等领域。

USB GPS接收器(两米延长线)
这是一款采用Ublox定位芯片,能够以56通道接收卫星信号、低功耗、高灵敏度的GPS接收机。内置卫星接收天线,和传统接收机相比较它具有信号更强、定位更快等优点。产品采用高精度的定位芯片件及工业级制造工艺,故能满足工业级的定位需求和个人使用需求。内置电池用以存储卫星资料,如卫星讯号状态、最后位置及时间,方便快速的增加下一次开机时的定位速度。采用USB接口能在树莓派,英伟达,LP上使用。USB线长达2米,传感器底部有磁性吸附在金属物件上更有利于传感器安装。可适用于车载导航、手持定位、可穿戴设备等领域。
技术规格
- 芯片:UBX-G7020-KT
- 频率:L1, 1575.42MHz
- 波特率:4800,9600,19200,38400,57600,115200bps
- 接收通道:56CH
- 灵敏度:跟踪:-162dBm 捕捉:-160dBm 冷启动-148dBm
- 冷启动:平均29秒
- 温启动:平均3秒
- 热启动:平均1秒
- 精度:水平位置精度<2.5M,SBAS<2.0M,授时精度:30ns
- 更新频率:1HZ
- 工作温度:-40℃~85℃
- 储存温度:-40℃~85℃
使用教程
1、NMEA0183协议介绍
将USB GPS接收器接入电脑,放置在空旷露天的地方,用串口助手查看传感器数据。
传感器将传出一下这几项数据
$GPGGA,061831.000,2236.9152,N,11403.2422,E,2,07,1.1,144.0,M,-2.2,M,4.8,0000*60
$GPGSA,A,3,18,22,25,12,14,21,24,15,,,,,1.93,1.04,1.63*01
$GPGSV,3,1,11,12,40,089,45,14,37,314,46,15,10,078,44,18,77,096,43*72
$GPGSV,3,2,11,21,27,192,31,22,60,330,43,24,24,037,45,25,42,142,41*71
$GPGSV,3,3,11,31,21,230,27,42,51,128,37,50,46,122,39*4D
$GPRMC,061831.000,A,2236.9152,N,11403.2422,E,0.00,,130214,,,D*76
$GPVTG,309.62,T, ,M,0.13,N,0.2,K*6E
1.1、GGA
样例数据:$GPGGA,061831.000,2236.9152,N,11403.2422,E,2,07,1.1,144.0,M,-2.2,M,4.8,0000*60
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息 ID | $GPGGA | GGA 协议头 | |
| UTC 时间 | 061831.000 | hhmmss.sss | |
| 纬度 | 2236.9152 | ddmm.mmmm | |
| N/S 指示 | N | N=北,S=南 | |
| 经度 | 11403.2422 | dddmm.mmmm | |
| E/W 指示 | E | W=西,E=东 | |
| 定位指示 | 2 | 0:未定位 1:SPS 模式,定位有效 2:差分,SPS 模式,定位有效 3:PPS 模式,定位有效 | |
| 卫星数目 | 07 | 范围 0 到 12 | |
| HDOP | 1.1 | 水平精度 | |
| MSL 幅度 | 144.0 | 米 | - |
| 单位 | M | 米 | |
| 大地 | -2.2 | 米 | - |
| 单位 | M | - | |
| 差分时间 | 4.8 | 秒 | 当没有 DGPS 时,无效 |
| 差分 ID | 0000 | ||
| 校验和 | *60 |
1.2、GSA
样例数据:$GPGSA,A,3,18,22,25,12,14,21,24,15,,,,,1.93,1.04,1.63*01
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息 ID | $GPGSA | GSA 协议头 | |
| 模式 1 | A | M=手劢(强制操作在 2D 或 3D 模式),A=自劢 | |
| 模式 2 | 3 | 1:定位无效, 2:2D 定位 ,3:3D 定位 | |
| 卫星使用 | 18 | 通道 1 | |
| 卫星使用 | 22 | 通道 2 | |
| 卫星使用 | 25 | 通道 3 | |
| 卫星使用 | 12 | 通道 4 | |
| 卫星使用 | 14 | 通道 5 | |
| 卫星使用 | 21 | 通道 6 | |
| 卫星使用 | 24 | 通道 7 | |
| 卫星使用 | 15 | 通道 8 | |
| ,,, | ,,, | ,,, | ,,, |
| 卫星使用 | 通道 12 | ||
| PDOP | 1.93 | 位置精度 | |
| HDOP | 1.04 | 水平精度 | |
| VDOP | 1.63 | 垂直精度 | |
| 校验和 | *01 |
1.3、GSV
样例数据:
$GPGSV,3,1,11,12,40,089,45,14,37,314,46,15,10,078,44,18,77,096,43*72
$GPGSV,3,2,11,21,27,192,31,22,60,330,43,24,24,037,45,25,42,142,41*71
$GPGSV,3,3,11,31,21,230,27,42,51,128,37,50,46,122,39*4D
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息 ID | $GPGSV | GSV 协议头 | |
| 消息数目 | 3 | 范围 1 到 3 | |
| 消息编号 | 1 | 范围 1 到 3 | |
| 卫星数目 | 11 | ||
| 卫星 ID | 12 | 范围 1 到 32 | |
| 仰角 | 40 | 度 | 最大 90° |
| 方位角 | 089 | 度 | 范围 0 到 359° |
| 载噪比(C/No) | 45 | dBHz | 范围 0 到 99,没有跟踪时为空 |
| 卫星 ID | 14 | 范围 1 到 32 | |
| 仰角 | 37 | 度 | 最大 90° |
| 方位角 | 314 | 度 | 范围 0 到 359° |
| 载噪比(C/No) | 46 | dBHz | 范围 0 到 99,没有跟踪时为空 |
| 卫星 ID | 15 | 范围 1 到 32 | |
| 仰角 | 10 | 度 | 最大 90° |
| 方位角 | 078 | 度 | 范围 0 到 359° |
| 载噪比(C/No) | 44 | dBHz | 范围 0 到 99,没有跟踪时为空 |
| 卫星 ID | 18 | 范围 1 到 32 | |
| 仰角 | 77 | 度 | 最大 90° |
| 方位角 | 096 | 度 | 范围 0 到 359° |
| 载噪比(C/No) | 43 | dBHz | 范围 0 到 99,没有跟踪时为空 |
| 校验和 | *72 |
1.4、RMC
样例数据:$GPRMC,061831.000,A,2236.9152,N,11403.2422,E,0.00,,130214,,,D*76
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息 ID | $GPRMC | RMC 协议头 | |
| UTC 时间 | 061831.000 | hhmmss.ss | |
| 状态 | A | A=数据有效;V=数据无效 | |
| 纬度 | 2236.9152 | ddmm.mmmmm | |
| N/S 指示 | N | N=北,S=南 | |
| 经度 | 11403.2422 | dddmm.mmmm | |
| E/W 指示 | E | W=西,E=东 | |
| 地面速度 | 0.00 | Knot(节) | |
| 方位 | 度 | ||
| 日期 | ddmmyy | ||
| 磁变量 | - | ||
| 校验和 | *76 |
1.5、VTG
样例数据:$GPVTG,309.62,T, ,M,0.13,N,0.2,K*6E
| 名称 | 样例 | 单位 | 描述 |
|---|---|---|---|
| 消息 ID | $GPVTG | VTG 协议头 | |
| 方位 | 309.62 | 度 | |
| 参考 | T | 真北参照系 | |
| 方位 | 309.62 | 度 | |
| 参考 | M | 磁北参照系 | |
| 速度 | 0.13 | Knot(节) | |
| 单位 | N | 节 | |
| 速度 | 0.2 | 公里/小时 | |
| 单位 | K | 公里/小时 | |
| 校验和 | *6E |
3、在树莓派、Jetson Nano或Linux上通过程序读取GPS数据
3.1、下载程序,并插入USB GPS接收器。
这里以树莓派为例,Jetson Nano或Linux操作方式一样。
在终端依次输入一下命令
cd ..... //你想保存文件的目录
git clone https://github.com/DFRobotdl/USB_GPS_CN.git //下载github上的程序
cd USB_GPS_CN

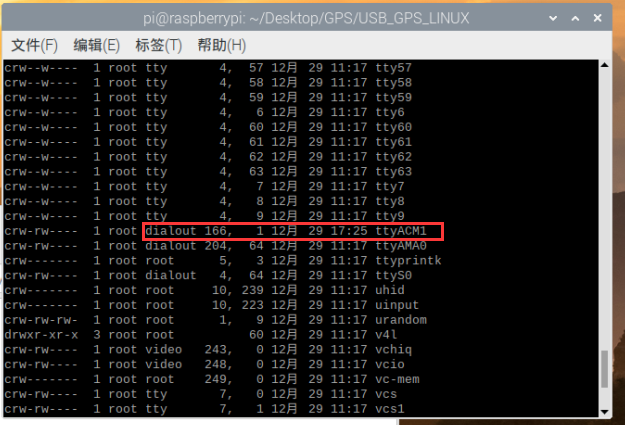
3.2、查看设备
在终端输入:
sudo ls -l /dev
找到你刚刚接入的设备
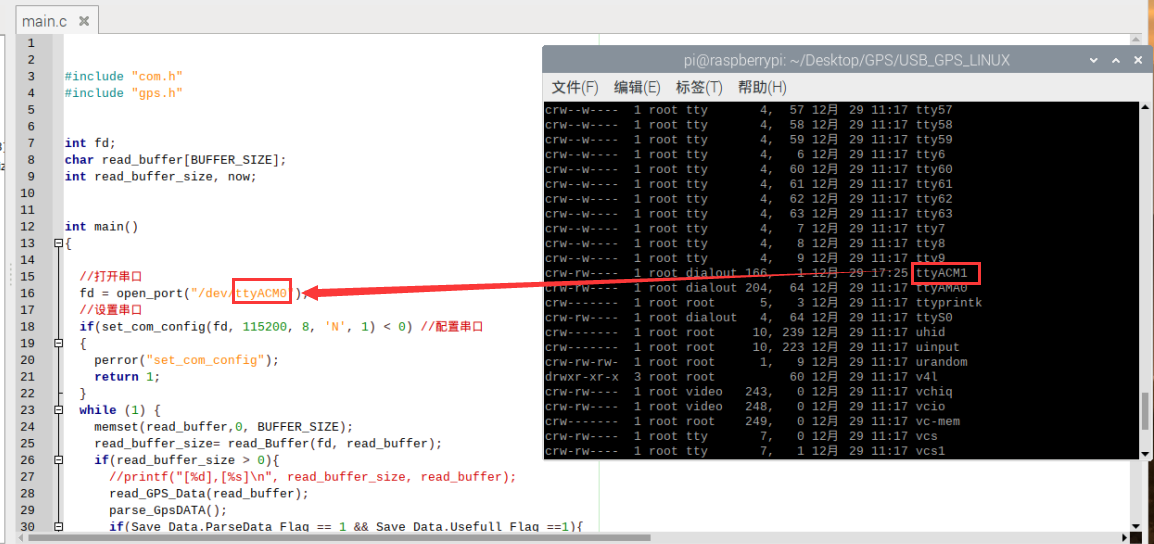
3.3、打开之前下载的min.c文件,将程序中程序中设备端口与实际改为一致并保存。
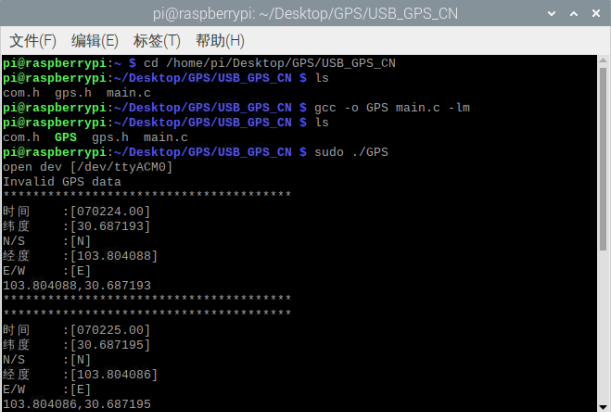
3.4、使用终端打开程序所在的文件夹,编译并运行
cd ..... /USB_GPS_CN
gcc -o GPS main.c -lm
sudo ./GPS
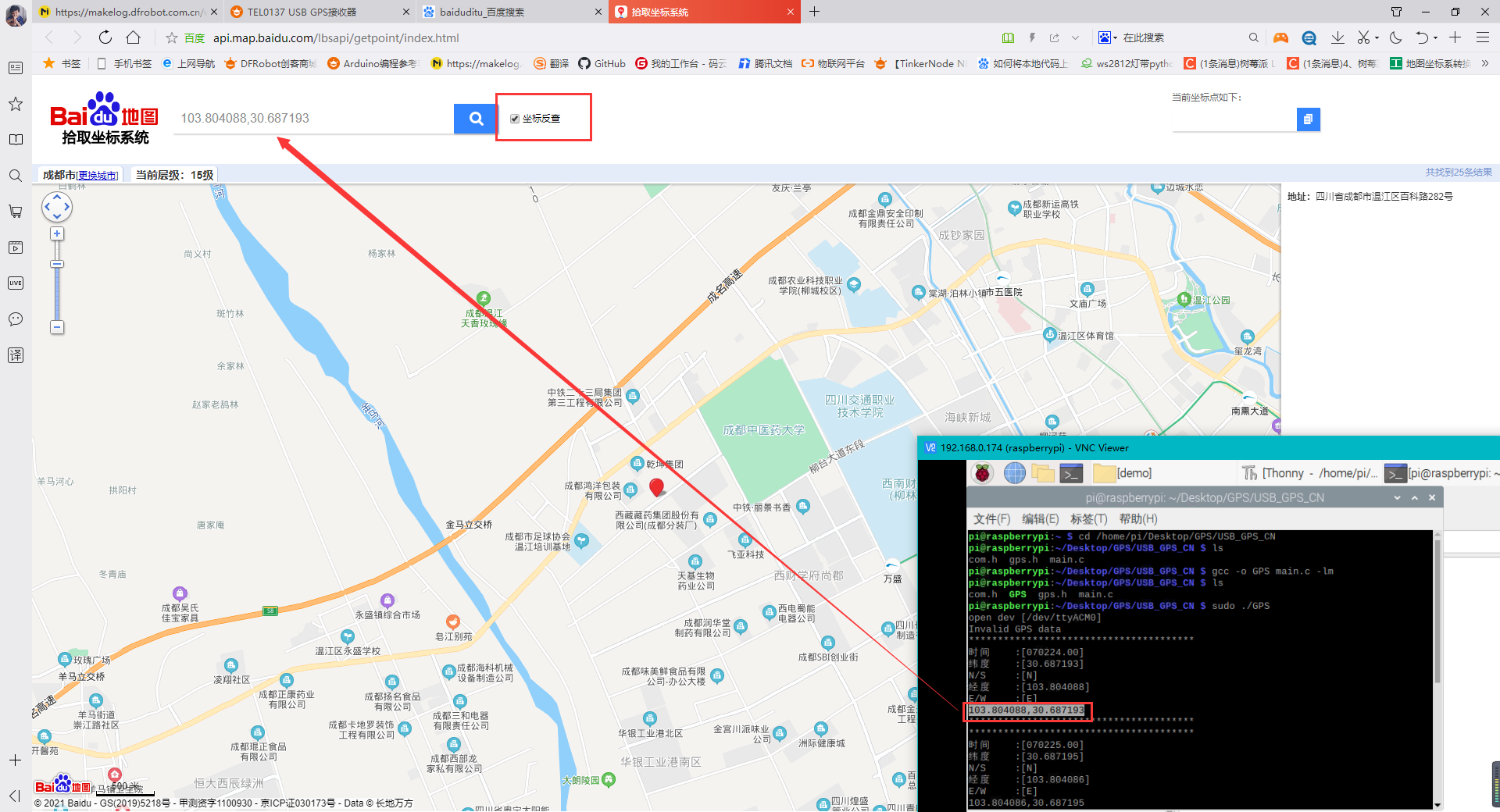
3.5、将GPS数据复制到百度地图拾取坐标系统,并勾选坐标反查
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖