简介
这是一款基于80GHz频段的高精度毫米波雷达模块,专为水位监测场景研发。采用调频连续波(FMCW)技术,远距离测量范围0.15~40m,分辨率1mm,测量精度±5mm。出厂已安装好透镜,实现波束角±3°,显著提升测量指向性,减少环境干扰。
模块非接触式安装,避免接触各种腐蚀性液体,使用寿命更长,内置抗干扰算法,可在强反射、多目标复杂环境下稳定工作,适用于湖泊、河流、山洪预警、蓄水池及腐蚀性污水管网等场景。
注:雷达工作频段为80GHz,测距的范围40m为最大测量范围,根据物体RCS的大小,探测距离的最大值会有偏差。出厂已将毫米波模块的测量零点从天线面校准到透镜端,测量距离值将从透镜顶端开始计算。
特性
- 远距离测量:40m的液位高度测量
- 高精度测距:±5mm精度,1mm分辨率
- 抗干扰能力:FMCW技术抑制环境光、水雾、温度漂移影响
- 透镜增强:标配±3°窄波束透镜天线,聚焦探测能量
应用场景
- 智慧水利:河流/水库/地下水实时水位监测
- 城市基建:污水管网溢流预警、雨水收集系统管理
- 灾害预防:山洪/泥石流监测站液位超限报警
- 工业监测:化工储罐、废水处理池非接触液位计量
技术规格
- 发射频率:77-81Ghz,带宽4G
- 输出功率(EIRP):13-20dBm
- 波束宽度(-3dB):水平方向±25°,垂直方向±25°
- 波束宽度(-3dB)外接透镜:水平方向±3°,垂直方向±3°
- 调制模式:FMCW
- 测距范围:0.15-40m
- 测量精度:±5mm
- 分辨率:1mm
- 启动时间:100ms最快
- 工作电压:3.5-5V
- 工作电流:30mA
- 输出:UART(Modbus协议)
- 工作温度:-45°~85°C
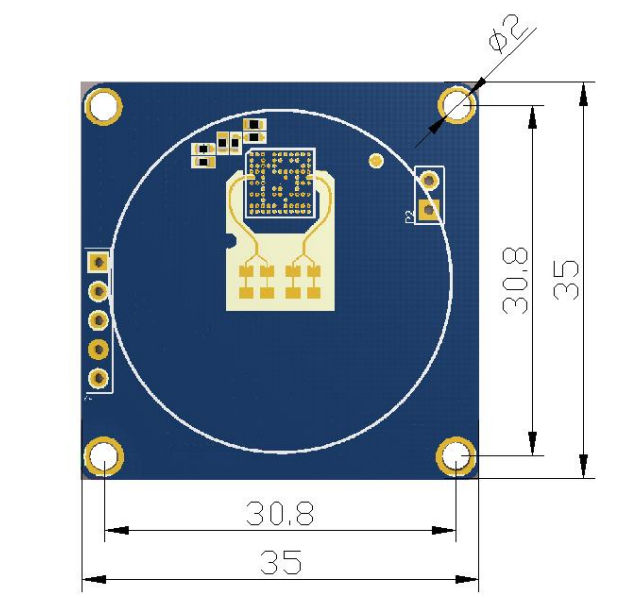
- 模组尺寸:35x35x1.2mm
- 模组重量:5g
- 安装透镜后重量:46g
引脚示意图
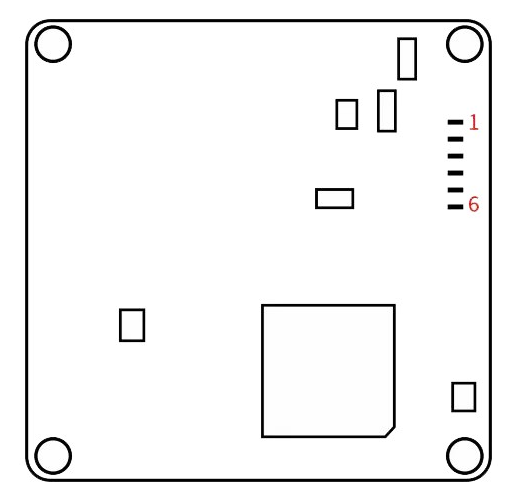
1.25-6Pin端子接口
| 引脚 | 功能描述 |
|---|---|
| 1 | VCC 3.7~5V |
| 2 | GND |
| 3 | NC |
| 4 | NC |
| 5 | UART_TX |
| 6 | UART_RX |
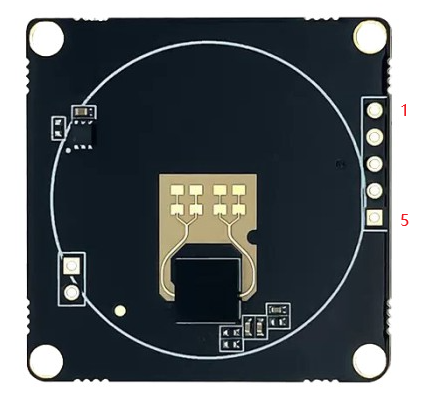
右侧焊盘接口
| 引脚 | 功能描述 |
|---|---|
| 1 | VCC 3.7~5V |
| 2 | GND |
| 3 | NC |
| 4 | UART_RX |
| 5 | UART_TX |
模块尺寸图
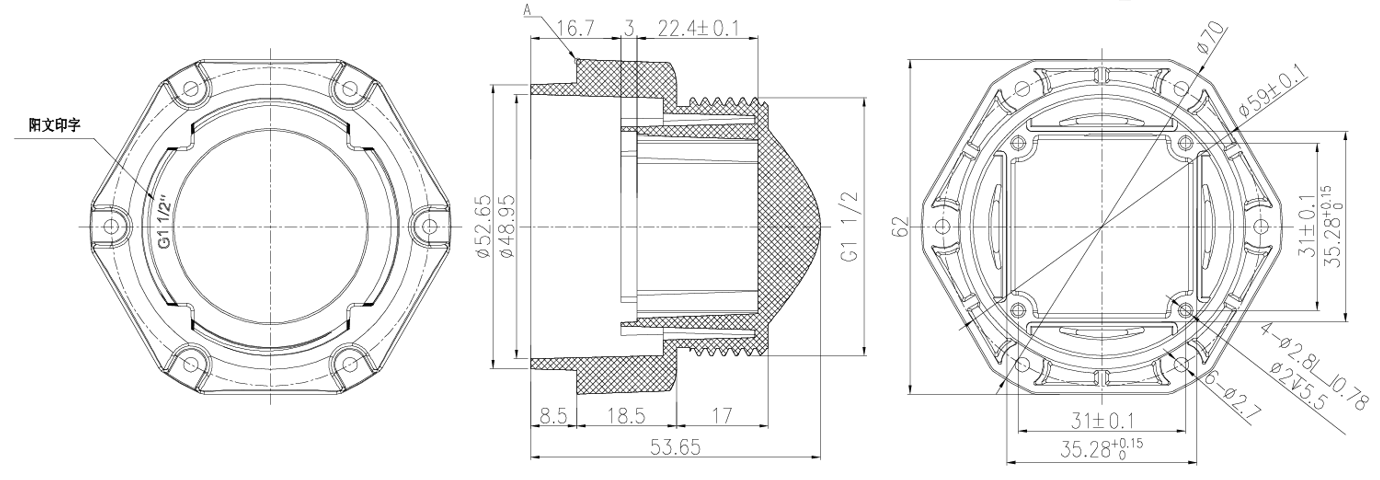
透镜尺寸图
接入Arduino使用教程
硬件准备
- Arduino UNO R3开发板 x1
- Arduino UNO IO 传感器扩展板 x1
- 80G液位检测毫米波传感器 x1
- 1.25mm转2.54杜邦连接线 x1
软件准备
- 下载Arduino IDE: 点击下载Arduino IDE
- 下载LiquidLevelDetection libraries
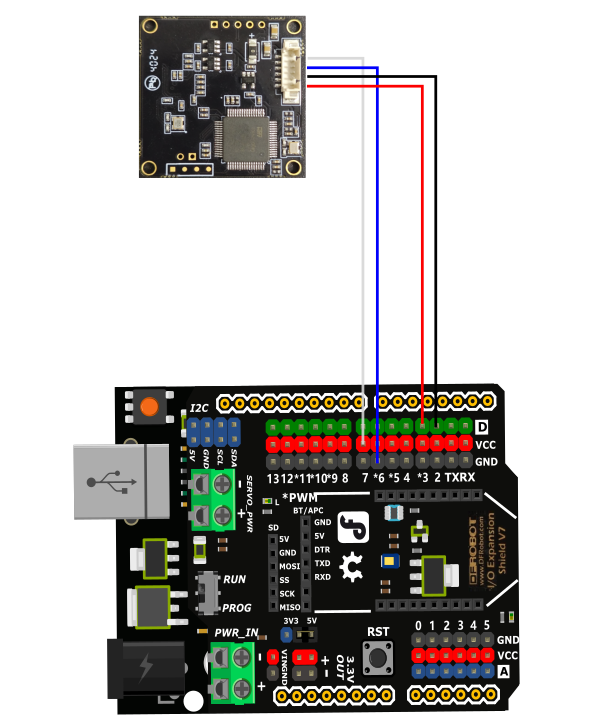
硬件连接
演示代码
烧录代码前,需要根据实际安装高度修改代码内的安装高度值“200”cm
#include <LiquidLevelDetection.h>
// 定义RX和TX引脚
#define RX_PIN 2
#define TX_PIN 3
// 定义波特率
#define BAUD_RATE 115200
// 创建传感器对象
LiquidLevelDetection sensor(RX_PIN, TX_PIN);
void setup() {
// 初始化串口通信,使用115200波特率
Serial.begin(BAUD_RATE);
Serial.println("毫米波液位检测传感器测试");
// 初始化传感器,使用115200波特率
if (!sensor.begin(BAUD_RATE)) {
Serial.println("传感器初始化失败!");
while (1);
}
char buffer[10]; // 用于格式化浮点数的缓冲区
// 设置安装高度(单位:厘米)
if (sensor.setInstallationHeight(200)) { // 2米 = 200厘米
Serial.println("安装高度设置成功");
// 等待一会儿让设备更新量程
delay(1000);
// 读取当前量程
float range = sensor.getRange();
Serial.print("当前量程: ");
dtostrf(range, 1, 3, buffer);
Serial.print(buffer);
Serial.println(" m");
Serial.println("------------------------");
} else {
Serial.println("安装高度设置失败");
}
}
void loop() {
char buffer[10]; // 用于格式化浮点数的缓冲区
// 读取安装高度
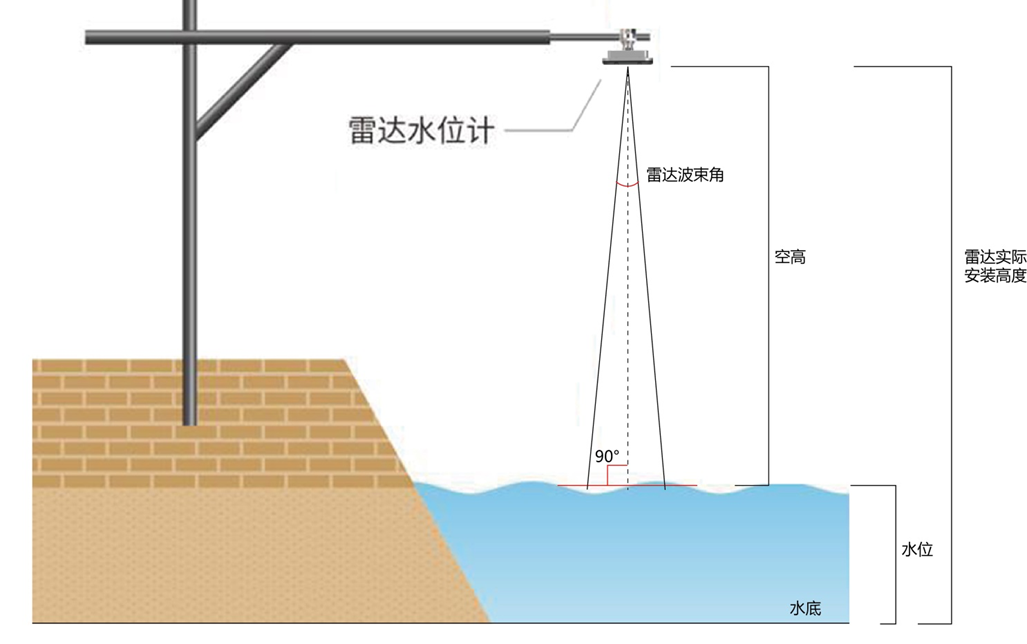
float installHeight = sensor.getInstallationHeight();
Serial.print("安装高度: ");
dtostrf(installHeight, 1, 3, buffer);
Serial.print(buffer);
Serial.println(" m");
// 读取空高(传感器到液面的距离)
float emptyHeight = sensor.getEmptyHeight();
Serial.print("空高: ");
dtostrf(emptyHeight, 1, 3, buffer);
Serial.print(buffer);
Serial.println(" m");
// 读取液位高度
float waterLevel = sensor.getWaterLevel();
Serial.print("液位高度: ");
dtostrf(waterLevel, 1, 3, buffer);
Serial.print(buffer);
Serial.println(" m");
Serial.println("------------------------");
delay(3000); // 每3秒更新一次
}
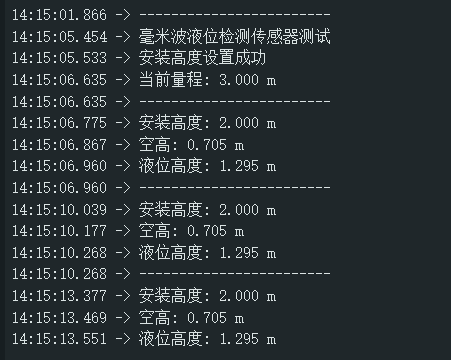
结果
安装高度设置成功后,会打印液位传感器的安装高度,空高以及液位高度。
安装示意图
更多资料下载
常见问题
- 数据异常时,按下开发板复位键,确保安装高度设置成功
- 量程无需设置,量程会根据安装高度自行变化,最大量程40m
- 出厂已将毫米波模块的测量零点从天线面校准到透镜端
