简介
这是一款高灵敏度5.8G Hz毫米波人体存在检测雷达模块。区别于传统只能通过检测人体大幅度的动作来判断是否有人存在不同,本模块能以极高灵敏度的检测人体呼吸等微小运动来判断是否有人存在。因此无论人体是处于静坐,睡觉等状态都可以准确感知到人员存在。感应结果可以选择通过串口输出或通过I/O口高低电平输出,并且传感器模块具有感应可靠性强、灵敏度高、体积小、使用简单、抗干扰强、易于嵌入集成等特点。可广泛应用于照明、安防、家居、家电、酒店、车库、楼宇、交通等需要检测人体微动、运动的行业领域。
技术规格
- 工作电压:4.5~5.5V
- 工作电流:22mA
- 探测距离:11m
- 等效发射功率:3-5dBM
- 波束角度:120*120°
- 调制模式:FMCW、CW
- 工作频率:5.8GHz
- 工作温度:-40~85℃
- 波特率:115200
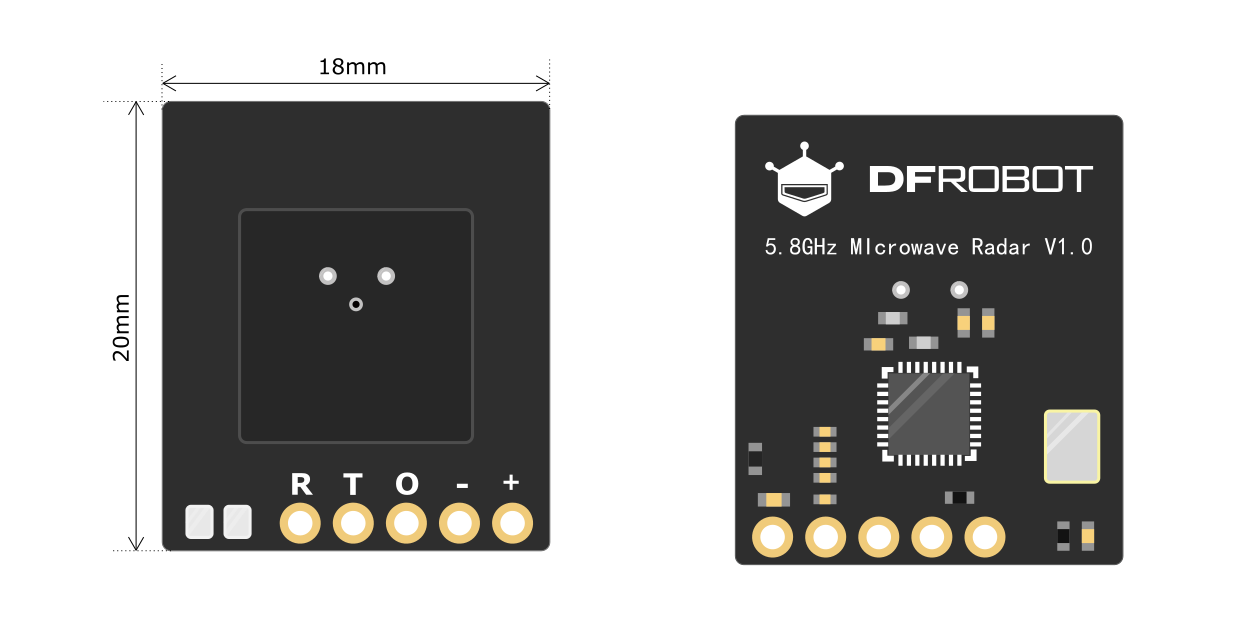
- 尺寸:20*18mm
接口定义
| 名称 | 功能描述 |
|---|---|
| R | 传感器串口接收 |
| T | 传感器串口发送 |
| O | 输出控制信号 |
| - | GND |
| + | VCC |
安装方式于检测范围
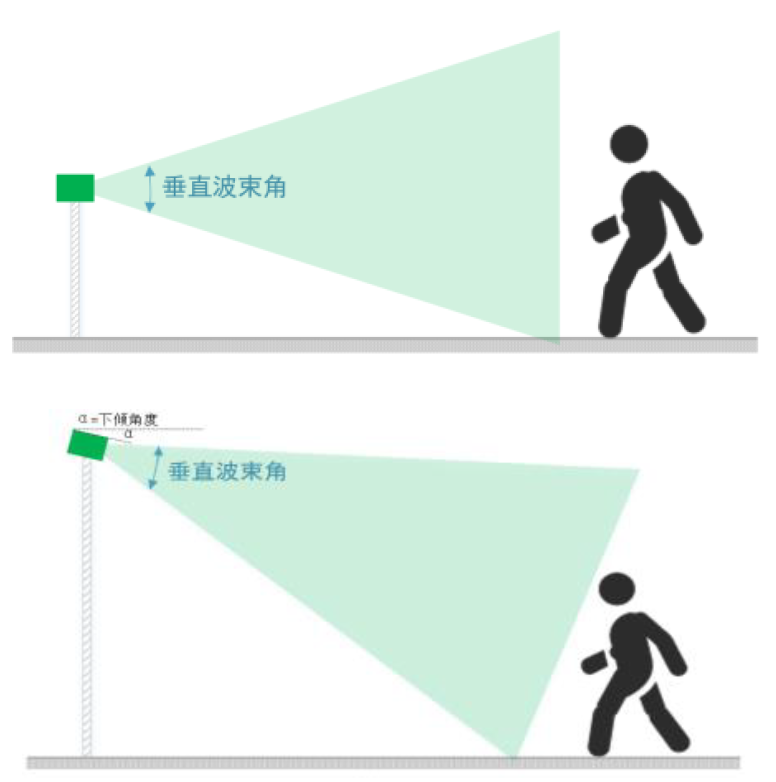
传感器对安装方式较为敏感,不当安装会影响传感器的性能和功能。该模块常用的安装方式有顶部安装、底部安装、水平安装和向下倾斜安装。
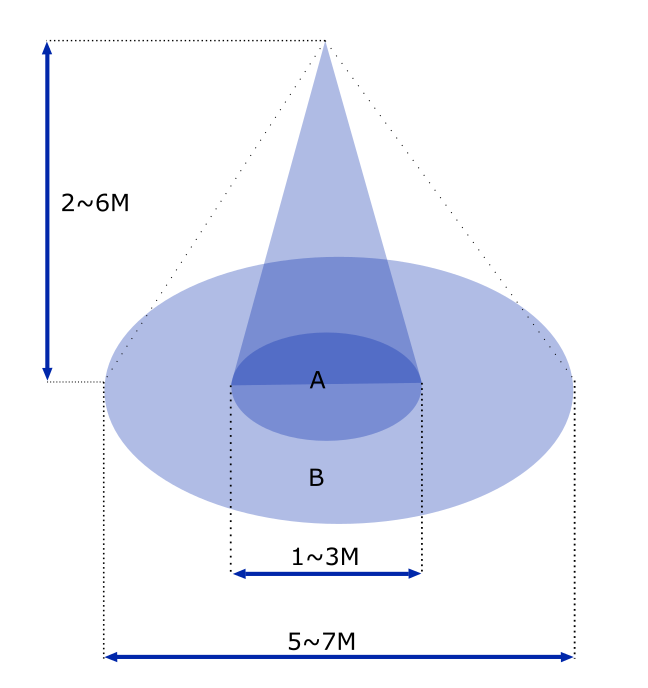
顶部安装
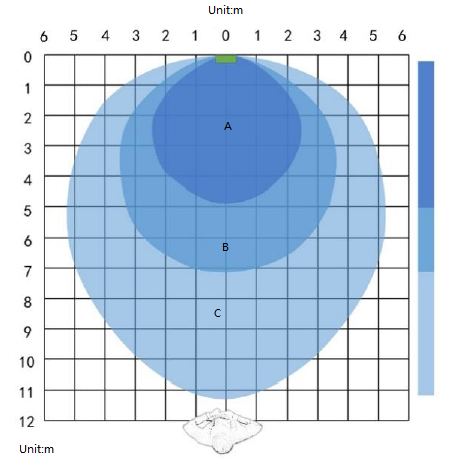
A区域:可检测站着不动、睡觉、静坐等静止状态
B区域:可检测微动(偏头,挥手,抬手,轻动身,翻书,左右前后微微倾斜等微小动作)
挂壁安装
A区域:可检测站着不动、睡觉、静坐等静止状态
B区域:可检测微动(偏头,挥手,抬手,轻动身,翻书,左右前后微微倾斜等微小动作)
C区域:可检测运动(走路、小跑、快跑、转圈、跳高等运动)
注:可检测半径与安装环境、人的 体型 ,相对角度,以及微动运动动作 幅度 等众多因素有关,上述参数是我司测试人员 使用纯模块的测试结果,微小动作和运动等描述都是定性描述,不是定量描述,仅供参考。在不同测试条件下,请 用户 以实测为准。
注意事项
- 需要注意模块直接照射到空调、窗帘、风扇、绿植等,因为如果这些物体的摆动可能引起模块误识别;
- 同时需要关注模块波束照射到地面、墙壁或门时,产生类似镜面反射的多次反射,间接检测到上述干扰物;
- 合适的最远检测距离 、灵敏度、延迟时间参数配置可排除部分物体干扰。
- 多个模块集中安装时,互相之间保持1.5m以上的间距,同向照射或相反方向照射避免各个模块互相照射
使用教程
准备
- 硬件
5.8G微波雷达模块
Arduino Uno
- 软件
Arduino IDE,点击下载Arduino IDE
DFRobot_Microwave_Radar_Module库,点击下载DFRobot_Microwave_Radar_Module库
如何安装库文件,点击链接
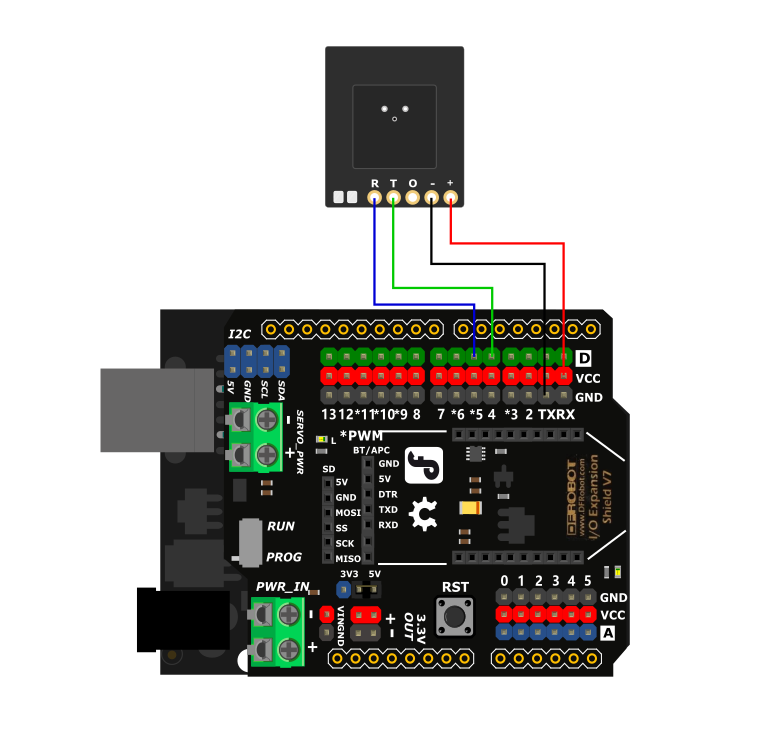
接线图
主要函数列表
/**
@brief 初始化函数
@return true 成功
@return false 错误
*/
bool begin();
/**
@brief 读取传感器是否检测到目标
@return true 检测到目标
@return false 未检测到目标
*/
bool readPresenceDetection();
/**
@brief 配置检测距离
@param distance 检测距离,0~11米,默认为6米
*/
void detRangeCfg(int distance);
/**
@brief 配置检测灵敏度
@param sensitivity 检测灵敏度,0~9数值越大,灵敏度越高,默认为7
*/
void setSensitivity(int sensitivity);
/**
@brief 配置输出延时时间
@param par1 确认延时;检测到目标,持续 par1 时长后,输出目标有效信号.取值范围:0~100,单位秒,默认 1 秒
对于检测响应速度要求不高的场景,建议不小于 1 秒,能够很大程度上降低误报率
@param par2 消失延时;未检测到目标,持续 par2 时长后,输出无效目标信号,取值范围:1~1500,单位秒,默认 15 秒
*/
void outputLatency(int par1, int par2);
/**
@brief 配置输出输出控制信号接口极性
@param voltage true 有目标时输出高电平,无目标时输出低电平(默认状态),false 有目标时输出低电平,无目标时输出高电平
*/
void setGpioMode(bool voltage);
/**
@brief 恢复出厂设置
*/
void factoryReset ( void );
样例代码
复制以下代码到您的Arduino IDE中并上传。
#include "DFRobot_Microwave_Radar_Module.h"
#if (defined(ARDUINO_AVR_UNO) || defined(ESP8266)) // 使用软串口
SoftwareSerial softSerial(/*rx =*/4, /*tx =*/5);
DFRobot_Microwave_Radar_Module Sensor(/*softSerial =*/&softSerial);
#elif defined(ESP32) // 使用 可重映射引脚的 硬串口 : Serial1
DFRobot_Microwave_Radar_Module Sensor(/*hardSerial =*/&Serial1, /*rx =*/D3, /*tx =*/D2);
#else // 使用硬串口 : Serial1
DFRobot_Microwave_Radar_Module Sensor(/*hardSerial =*/&Serial1);
#endif
int ledPin = 13;
void setup()
{
Serial.begin(115200);
//初始化传感器
while ( !( Sensor.begin() ) ) {
Serial.println("Communication with device failed, please check connection");
delay(3000);
}
Serial.println("Begin ok!");
pinMode(ledPin, OUTPUT);
/**
@brief 恢复出厂设置
*/
Sensor.factoryReset();
/**
@brief 配置检测距离,0~11米,默认为6米
*/
Sensor.detRangeCfg(6);
/**
@brief 配置检测灵敏度,0~9数值越大,灵敏度越高,默认为7
*/
Sensor.setSensitivity(3);
/**
@brief 配置输出延时时间
*/
Sensor.outputLatency(1, 15);
/**
@brief 配置输出输出控制信号接口极性
*/
Sensor.setGpioMode(1);
}
void loop()
{
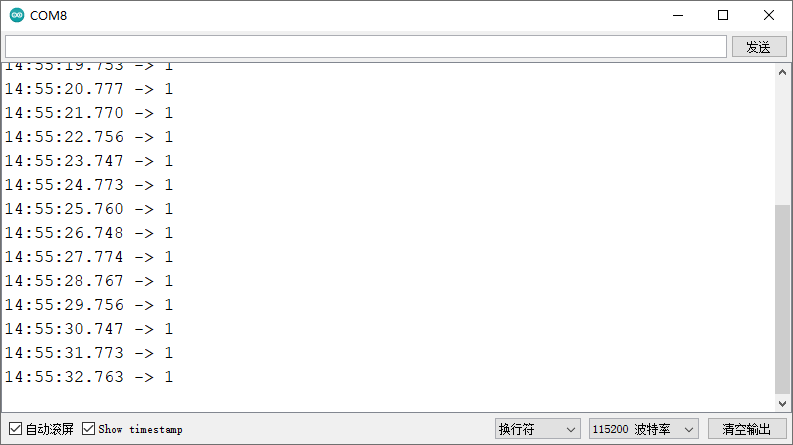
int val = Sensor.readPresenceDetection();
digitalWrite(ledPin, val);
Serial.println(val);
}
结果
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖