概 述
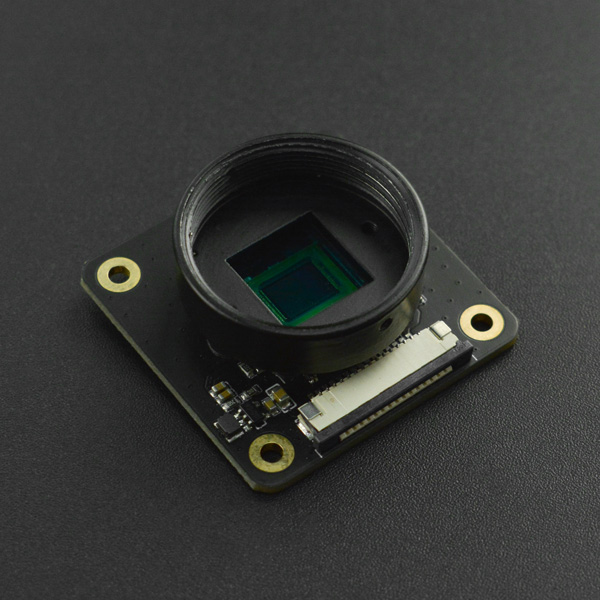
这是一款用于英伟达Jetson Nano的高质量摄像头模组。采用索尼的IMX477R芯片,兼容英伟达Jetson Nano系列和树莓派CM3计算模块。需搭配C或CS型镜头使用。相对于IMX219摄像头,它可以提供更高的分辨率(可达1230万像素)和更高的灵敏度,每个像素面积大约增加50%,使用与工业和消费类场景。
特性
- 具有12.3MP高分辨率的索尼IMX477R传感器
- 更大的像素区域可提高低光性能
- 背照式传感器架构可提高灵敏度
- 支持广泛的 C 和 CS 接口镜头
技术规格
- 传感器型号:索尼IMX477R
- CMOS对角线长度:7.9mm
- 分辨率:1230万像素(4056×3040)
- 单像素尺寸:1.5μm(H)×1.55μm(V)
- 输出格式:RAW12/10/8,COMP8
- 后焦距:可调
- 镜头标准:C-mount/CS-mount(配套C/CS连接环)
- 红外滤光片:集成
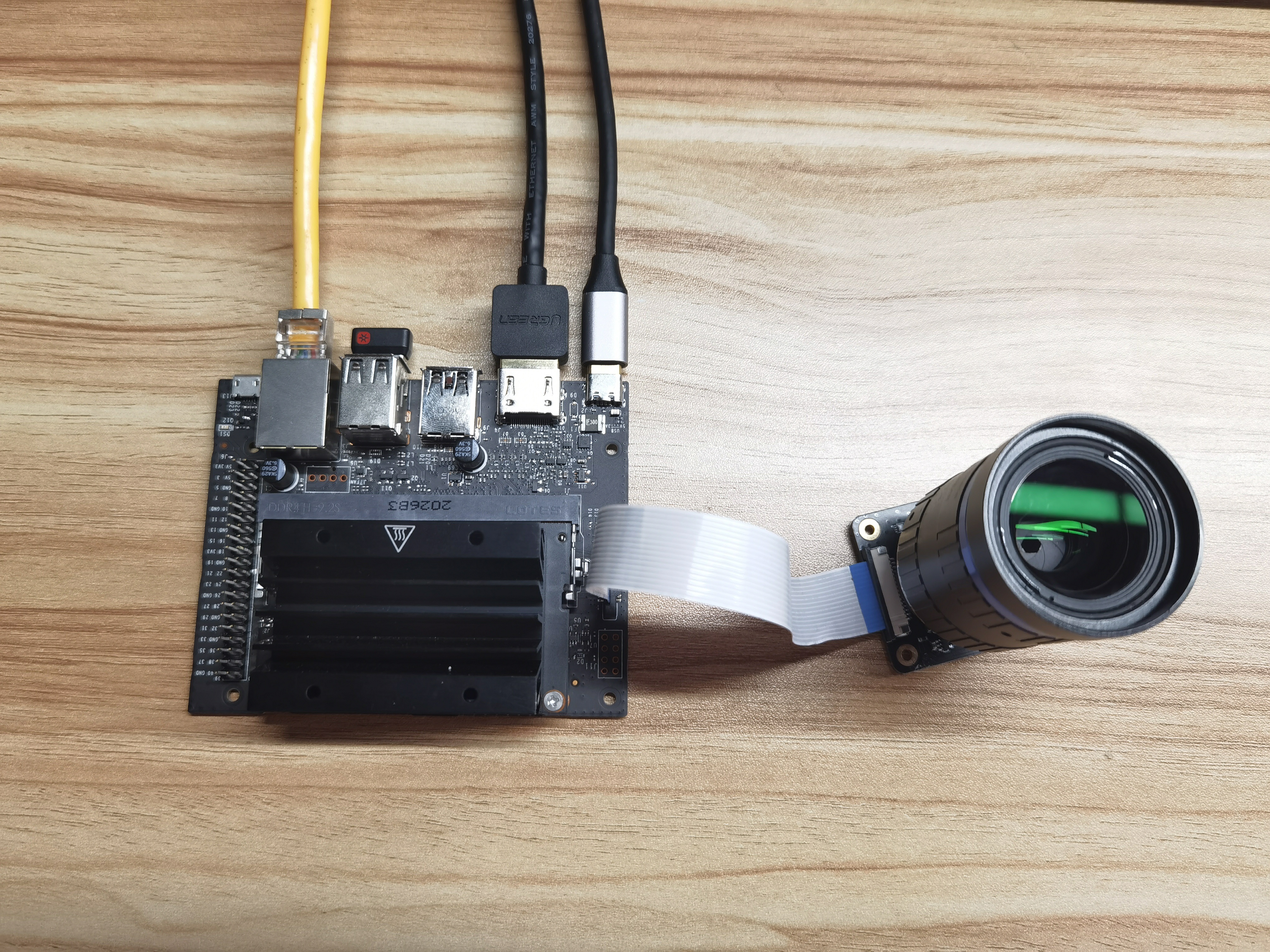
硬件安装
将摄像模组与镜头(FIT0828或FIT0829)、Jetson Nano正确连接后Jetson Nano上电开机。
软件驱动安装
所有针对 JetPack 4.6/L4T 32.6.1 之前版本 以及 JetPack 4.6.5/L4T 32.7.5 之后版本 发布的、与相机相关的驱动程序包和软件支持均已停止,不再进行主动维护。为获得最佳兼容性与技术支持,我们强烈建议使用支持范围内的版本:JetPack 4.6/L4T 32.6.1 至 JetPack 4.6.5/L4T 32.7.5。
-
下载这个 bash 脚本
cd ~ wget https://github.com/ArduCAM/MIPI_Camera/releases/download/v0.0.3/install_full.sh -
安装驱动程序
chmod +x install_full.sh ./install_full.sh -m imx477 -
安装完成后输入y设备自动重启。
使用方式
在屏幕上开始捕获和预览显示
为了检查相机是否正常工作,您可以运行以下命令,这将开始捕获并在屏幕上预览显示。
nvgstcapture-1.0
此示例命令将图像旋转 180 度(垂直翻转)
nvgstcapture-1.0 --orientation 2
拍照并保存到磁盘
运行时命令行选项
-
nvgstcapture-1.0 -
按“j”捕捉一张图像。
-
按“q”退出
自动命令行选项
nvgstcapture-1.0 --automate --capture-auto
注意:使用“nvgstcapture-1.0 --help”来参考支持的命令行选项
捕获视频并保存到磁盘
运行时命令行选项
-
nvgstcapture-1.0 -
按“1”开始录制视频
-
按“0”停止录制视频
-
按“q”退出
自动命令行选项
nvgstcapture-1.0 --mode=2 --automate --capture-aut
注意:使用“nvgstcapture-1.0 --help”来参考支持的命令行选项
在docker内使用摄像头
命令是相同的,只需在使用“docker run”启动容器时将此选项添加到命令行即可
--volume /tmp/argus_socket:/tmp/argus_socket
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖