
简介
风向传感器是用于测量风的水平风速的专业气象仪器。其内部采用霍尔角度传感器,传感器的外壳和风杯均采用铝合金材料,使用特种模具精密压铸工艺,尺寸公差甚小表面精度甚高,内部电路均经过防护处理,整个传感器具有很高的强度、耐候性、防腐蚀和防水性。电缆接插件为军工插头,具有良好的防腐、防侵蚀性能,能够保证仪器长期使用。选用低惯性风向标感应风向,当风吹动风杯转动通过轴杆带动轴芯磁铁转动,通过计算得到准确的风速信息。可以测量0~32.4m/s风速,具有很高的性价比,可广泛用于气象、海洋、环境、机场、港口、实验室、工农业及交通等领域。
特性
- 体积小巧,携带方便,安装简捷
- 铝合金材料表面喷塑,耐腐蚀,抗高温
- 进口轴承,阻力小,启动风速低
- 测量精度高,量程宽,稳定性好
- 结构设计合理,外观质量佳
- 信号传输距离长,抗外界干扰能力强
技术规格
- 测量范围:0~32.4m/s
- 启动风速:0.2-0.4m/s
- 精度:±0.3m/s
- 引线长度:2.5m
- 供电电压:7-24V
- 通讯协议:RS485接口Modbus协议
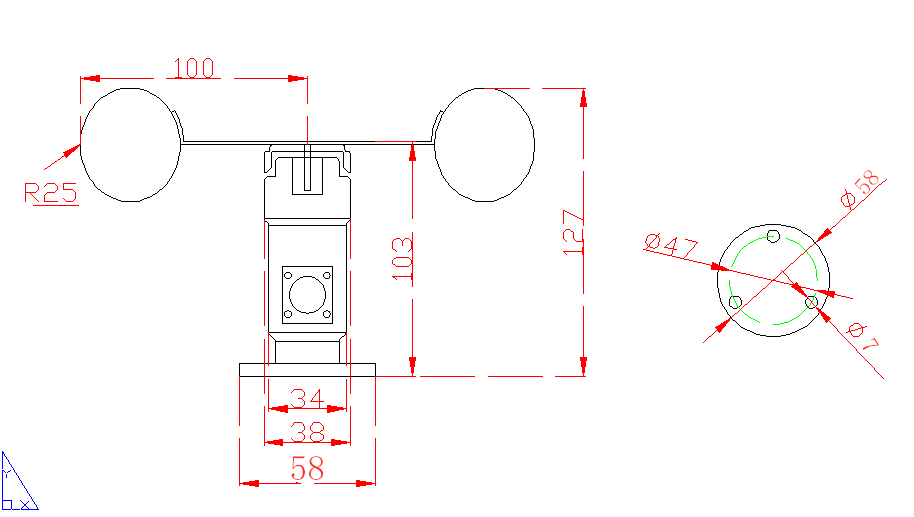
尺寸
使用说明书
1、线色说明
| 颜色 | 功能 |
|---|---|
| 红色 | 电源正 |
| 黑色 | 电源负 |
| 黄色 | RS485+/A/T+ |
| 绿色 | RS485-/B/T- |
2、Modbus协议
-
**通讯参数默认值为:**波特率9600bps,一个起始位,8个数据位,无校验,一个停止位。
-
Modbus 寄存器
| 参数名称 | 寄存器地址 | 功能类型 | 功能号 | 参数范围及说明 | 默认值 |
|---|---|---|---|---|---|
| 风速值 | 0x0000 | INT16 只读 |
0x03/读 | 0-324 | 无 |
| Modbus从机地址 | 0x1000 | INT16 读写 |
0x03/读 0x10/写 |
0-255 | 2 |
- Modbus 寄存器参数说明
| 风速值 | ||
|---|---|---|
| 参数范围 | 0-324 | 默认值:无 |
| 参数存储 | 无 |
意义:风向测量值
举例:如果返回的值是00 25(16进制,原码) = 0x0025 = 37,那么风速测量值为37/10=3.7m/s
| Modbus从机地址(ADDRESS) | ||
|---|---|---|
| 参数范围 | 0-255 | 默认值:2 |
| 参数存储 | 立即存储 |
Modbus地址,可设置为0-255。使用0地址可以设置任何地址。
- 举例说明
-
读寄存器0x0000,即风速的测量值
主机查询帧(16进制):02 03 00 00 00 01 84 39(8byt)
从机地址 功能码 寄存器起始地址 寄存器长度 校验码高位 校验码低位 1byt 1byt 2byt 2byt 1byt 1byt 0x02 0x03 0x00 0x00 0x00 0x01 0x84 0x39 从机应答帧(16进制):02 03 02 00 25 3D 9F(7byt)
从机地址 功能码 有效字节数 数据区 校验码高位 校验码低位 1byt 1byt 1byt 2byt 1byt 1byt 0x02 0x03 0x02 0x00 0x25 0x3D 0x9F 风速值为(16进制,原码)00 25 = 0x0025 = 37,那么风速测量值为37 / 10 = 3.7m/s
-
修改寄存器0x1000,即Modbus从机地址(ADDRESS)
将即Modbus从机地址修改为03
主机查询帧(16进制):00 10 10 00 00 01 02 00 03 FA 00(11byt)
从机地址 功能码 寄存器起始地址 寄存器长度 有效字节数 写入的从机地址 校验码高位 校验码低位 1byt 1byt 2byt 2byt 1byt 2byt 1byt 1byt 0x00 0x10 0x10 0x00 0x00 0x01 0x02 0x00 0x03 FA 00 从机应答帧(16进制):00 10 10 00 00 01 04 D8(7byt),即为修改成功。
在树莓派上使用
1、接线
这里需要用到USB转485模块

2、安装库和下载例程
在终端依次输入一下命令
cd /tmp
wget https://project-downloads.drogon.net/wiringpi-latest.deb //下载wiringpi库
sudo dpkg -i wiringpi-latest.deb //安装wiringpi库
cd ..... //进入你想保存文件的目录
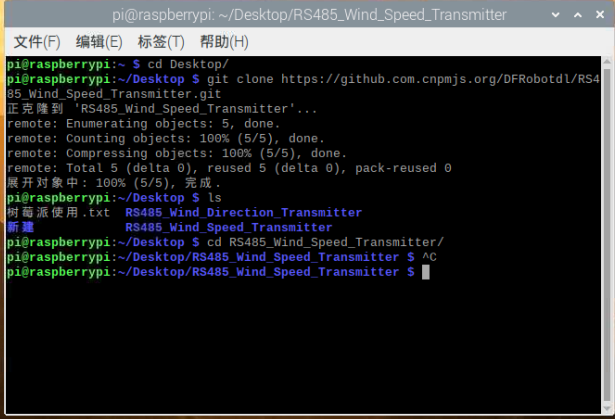
git clone https://github.com/DFRobotdl/RS485_Wind_Speed_Transmitter.git //下载github上的程序
cd RS485_Wind_Speed_Transmitter/
3、主要API接口函数列表
/**
@brief initialize serial port
@param device Address of serial port,In Linux, it is the directory where the device is located.
@return Return 1 for initialization failure, and return 0 for initialization success
*/
unsigned char Init(char *device);
/**
@brief Modify address
@param Address1 For the current address, you can set any address with 0 address
@param Address2 The modified address.
@return A return value of 1 indicates success, and a return value of 0 indicates failure
*/
unsigned char ModifyAddress(unsigned char Address1, unsigned char Address2);
/**
@brief Read wind speed
@param Address The address where you want to read the data
@return The return value ≥0 indicates successful reading, the return value is wind speed, and the return value -1 indicates failed reading
*/
float readWindSpeed(unsigned char Address);
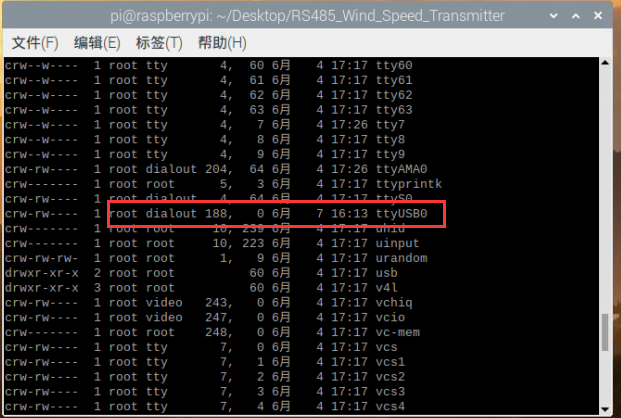
4、查看设备
在终端输入:
sudo ls -l /dev
找到你刚刚接入的设备
5、打开之前下载的min.c文件,将程序中程序中设备端口与实际改为一致并保存。

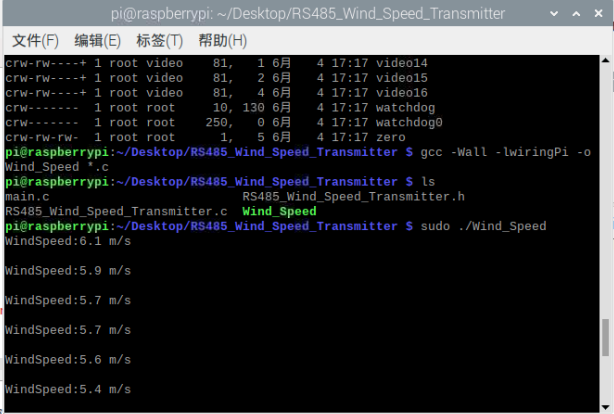
6、使用终端打开程序所在的文件夹,编译并运行
gcc -Wall -lwiringPi -o Wind_Speed *.c
sudo ./Wind_Speed
就看到准确的风速信息了
如何在Arduino和microbit主控上使用风速仪与风向仪?
点击查看:如何在Arduino和microbit 主控上使用风速仪与风向仪? ————RS485转UART
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖