
概 述
模块集成了高精度的陀螺仪、加速度计,采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块当前的实时运动姿态。采用先进的数字滤波技术,能有效降低测量噪声,提高测量精度。
模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态,姿态测量精度静态0.05 度,动态0.1 度,稳定性极高,性能甚至优于某些专业的倾角仪!
模块内部自带电压稳定电路,工作电压3.3v~5v,引脚电平兼容3.3V/5V 的嵌入式系统,连接方便。TTL 接口方便用户连接使用方式。
产品参数
- 电压:3.3V~5V
- 电流:<40mA
- 尺寸:51.33610mm
- 测量纬度:加速度:3 维,角速度:3 维,角度:3 维。
- 量程:加速度:±2/4/8/16 g(可选),角速度:±250/500/1000/2000 °/s(可选),角度±180°
使用教程
准备
- 硬件
串口6轴传感器
Arduino Uno
- 软件
Arduino IDE,点击下载Arduino IDE
DFRobot_WT61PC库,点击下载DFRobot_WT61PC库
如何安装库文件,点击链接
接线图
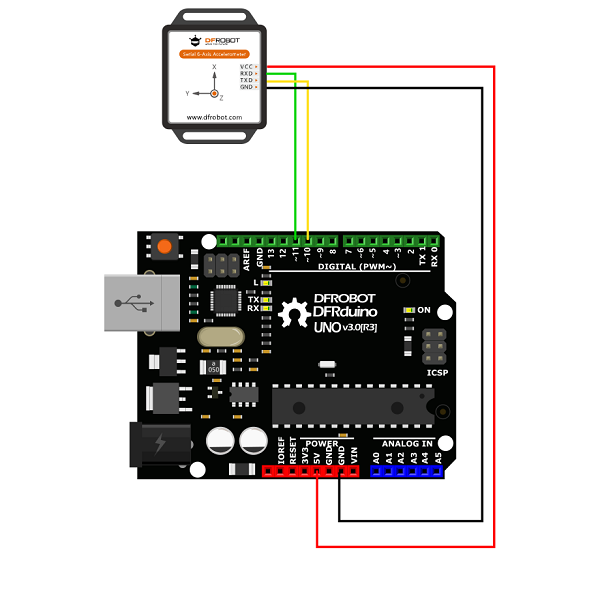
| WT61PC | Arduino Uno |
|---|---|
| VCC | 5V/3V |
| RXD | D11 |
| TXD | D10 |
| GND | GND |
样例代码
复制以下代码到您的Arduino IDE中并上传。
/*!
* @file getData.ino
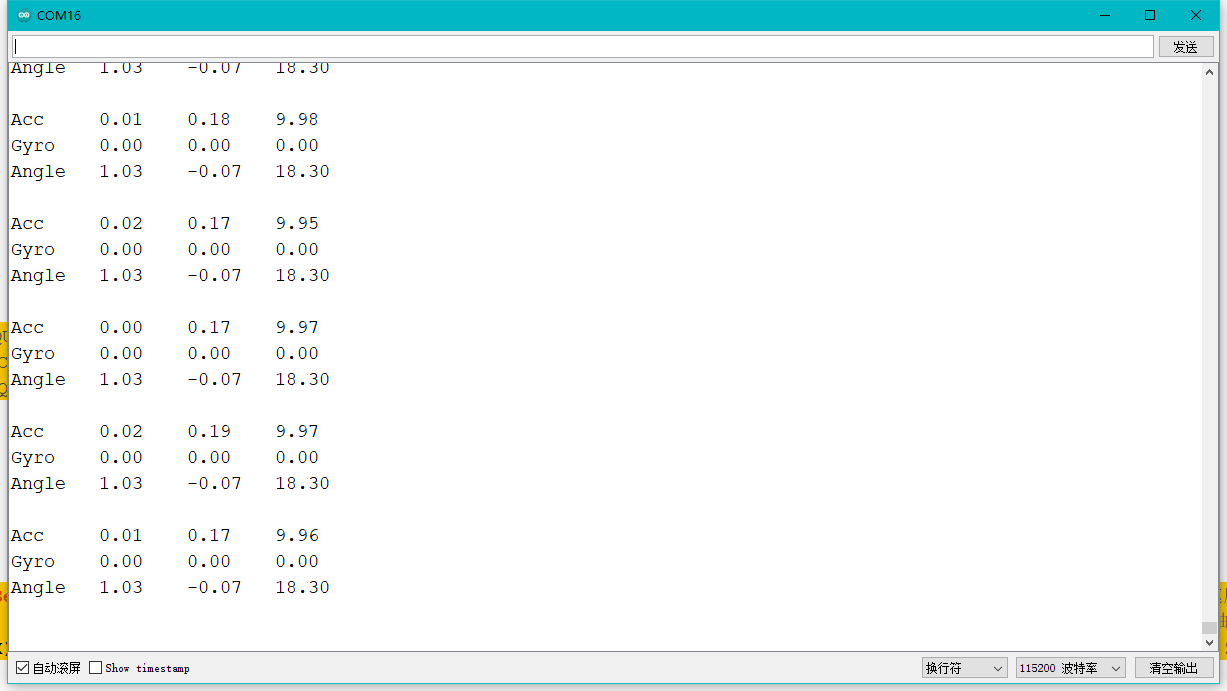
* @brief 可以设置传感器输出数据的频率,读取到传感器X、Y、Z轴的加速度、角速度和角度。
* @n 实验现象: 传感器设备启动成功后,将以你设置的频率传出数据并显示在串口监视器上。
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author [huyujie](yujie.hu@dfrobot.com)
* @version V1.0
* @date 2023-07-12
* @url https://github.com/DFRobot/DFRobot_WT61PC
*/
#include <DFRobot_WT61PC.h>
#if (defined(ARDUINO_AVR_UNO) || defined(ESP8266)) // Using a soft serial port
#include <SoftwareSerial.h>
SoftwareSerial softSerial(/*rx =*/10, /*tx =*/11);
#define FPSerial softSerial
#else
#define FPSerial Serial1
#endif
DFRobot_WT61PC sensor(&FPSerial);
void setup()
{
//Use Serial as debugging serial port
Serial.begin(115200);
#if (defined ESP32)
FPSerial.begin(9600, SERIAL_8N1, /*rx =*/D3, /*tx =*/D2);
#else
FPSerial.begin(9600);
#endif
void loop()
{
if (sensor.available()) {
Serial.print("Acc\t"); Serial.print(sensor.Acc.X); Serial.print("\t");
Serial.print(sensor.Acc.Y); Serial.print("\t"); Serial.println(sensor.Acc.Z); // X,Y,Z三轴加速度信息
Serial.print("Gyro\t"); Serial.print(sensor.Gyro.X); Serial.print("\t");
Serial.print(sensor.Gyro.Y); Serial.print("\t"); Serial.println(sensor.Gyro.Z); // X,Y,Z三轴角速度信息
Serial.print("Angle\t"); Serial.print(sensor.Angle.X); Serial.print("\t");
Serial.print(sensor.Angle.Y); Serial.print("\t"); Serial.println(sensor.Angle.Z); // X,Y,Z三轴角度信息
Serial.println();
}
}
结果
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖