[ ]
]
1. 产品简介
在中小学 STEM 机器人教育领域,传统的教学与比赛方式面临着诸多挑战。当前的 STEM 机器人比赛中,小车性能和功能的不足致使比赛规则单一,深度欠缺。学生们往往只能在巡线功能上比拼速度与流畅度,难以充分发挥创意,比赛分数也难以拉开差距,无法公平客观地评估学生的能力和水平。
麦昆 Plus V3 教育机器人的出现,为这一现状带来了改变。它是专为中小学 STEM 机器人进阶教学及比赛设计的创新产品。
内置巡线算法
巡线是 STEM 机器人教学和比赛的关键环节,但多数 STEM 小车的巡线功能差强人意,常导致巡线失败或效果不佳,比赛成绩过度依赖巡线的稳定性。麦昆 Plus V3 在底层直接集成巡线算法,学生可直接使用巡线功能,降低了巡线门槛。这一创新不仅使基本巡线不再决定比赛成败,还能推动设计更丰富、有创意的比赛任务玩法,引导学生将精力投入到巡线以外的任务点上。同时,因巡线算法内置在底层芯片,仅需基本配置即可完成常规巡线功能,相当于多了一个独立运算内核,micro:bit 可在巡线同时实现更多功能,如避障、闪灯、播放音乐、读取传感器和切换图像等,互不干扰。
内置路口识别算法
多数 STEM 小车缺乏路口识别功能,即便有相关硬件,也因软件支持不足和算法复杂而应用困难,导致比赛地图和任务路线单调。麦昆 Plus V3 在底层芯片内集成路口识别新功能,可实时识别十字路口、T 型路口、左转及直行路口、右转及直行路口。在 STEM 教育机器人比赛中,这一功能使得可以设计各种路口,让学生在不同路线上完成不同任务,极大地丰富了比赛的多样性和趣味性。
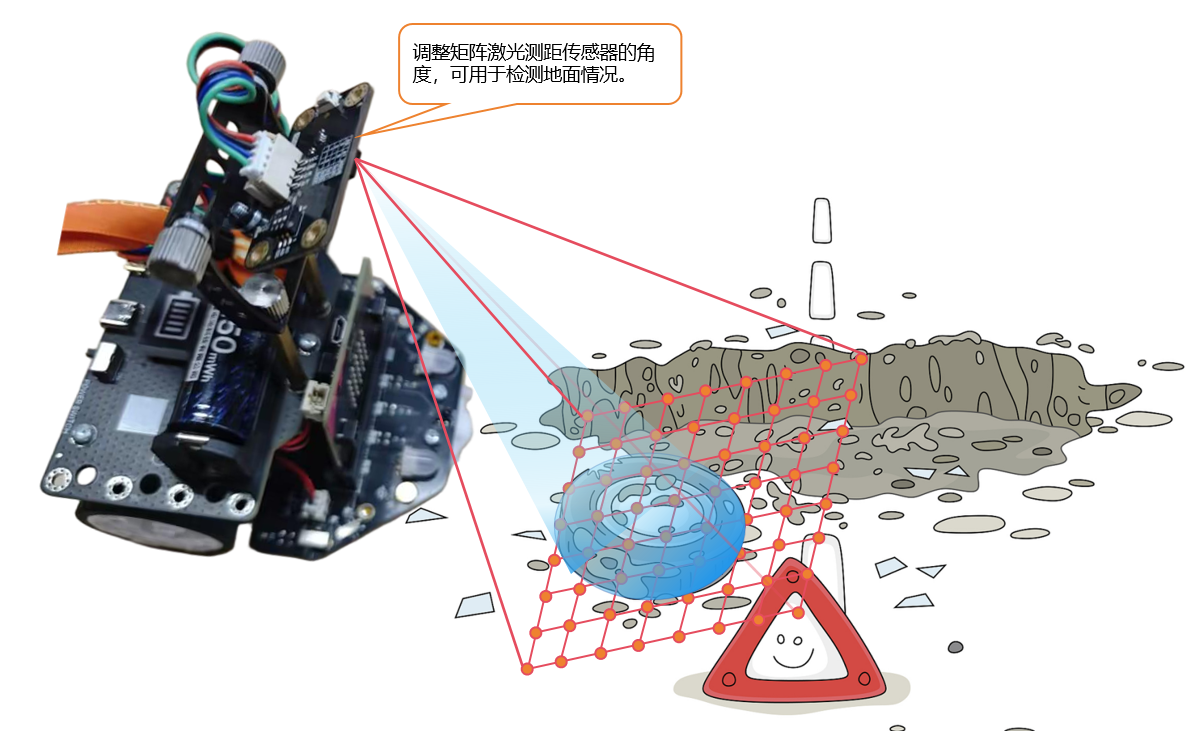
矩阵式激光测距传感器
市场上的 STEM 教育机器人普遍配置超声波测距传感器,但其只能测量前方障碍物距离,无法检测位置,应用玩法单调。麦昆 Plus V3 标配矩阵式激光测距传感器,其精度和响应速度远优于超声波传感器。在 60 度角检测范围内,不仅能准确测量障碍物距离,还能获取前方障碍物位置,提前规划行驶路线,有效避开障碍物,为机器人的行动提供了更精准的感知能力。
电机编码器及 PID 控制
许多 STEM 教育机器人未配置电机编码器,无法准确控制小车前进距离和转向角度,只能通过 “delay” 功能大致控制,调试繁琐。麦昆 Plus V3 新增电机编码器,可准确控制小车前进距离和转向角度,无需反复调试,在需要准确行驶距离的场景下表现出色,为教学和比赛提供了更可靠的运动控制保障。
可拆卸的金属电机组件
麦昆Plus V3采用精细化参数匹配的金属电机,经过对 30 多种电机样品的反复测试验证,在性能、可靠性和速度上精心适配,转动流畅不卡顿。同时,对电机进行整体防护,避免齿轮箱裸露,减少杂物进入损坏电机的风险。在进阶教学和比赛中,小车使用频率高,电刷易磨损,学生的不小心挤压、跌落也可能损坏电机。麦昆 Plus V3采用可拆卸式电机设计,电机损坏时可快速更换,避免影响教学和比赛。此外,增加电机专用稳压芯片,确保小车运行速度不受电池电压衰减影响,速度稳定,程序无需修改速度参数也能良好运行。
寻光、追光、避光,自动车灯
光线感知是机器人的重要功能之一,麦昆 Plus V3 板载 2 路光线强度传感器,位于小车前方左右两侧,具备光源位置定位和光线强度检测能力,能实现寻光、追光、避光、自动车灯等趣味应用,快速调动学生对机器人的兴趣,为教学和实践活动增添了更多乐趣和探索空间。
五颜六色的车灯与氛围灯
麦昆 Plus V3 采用 2 个加大号的彩色 RGB 前车灯和 4 颗彩色 RGB 氛围灯,灯光与传感器相互配合,以其多彩的魅力吸引学生,激发学生的创造力和想象力。
2. 麦昆Plus V2/V3功能差异表
| 名称 | 麦昆Plus V2 | 麦昆Plus V3 |
|---|---|---|
| WS2812 RGB ×4 | ✔ | ✔ |
| 红外数据接收×1 | ✔ | ✔ |
| 底部亚克力保护 | ✔ | ✔ |
| 蜂鸣器×1 | ✔ | ✔ |
| 巡线传感器校准 | ✔ | ✔ |
| 超声波测距传感器 | ✔ | 已升级为矩阵激光测距传感器 |
| LED车灯×2 | ✔ | 已升级为RGB车灯 |
| RGB车灯×2 | × | ✔ |
| 矩阵激光测距传感器 | × | ✔ |
| 光照传感器×2 | × | ✔ |
| 电机编码器及PID控制 | × | ✔ |
| 芯片级内置巡线功能 | × | ✔ |
| 芯片级内置路口识别功能 | × | ✔ |
| 电机可拆卸 | × | ✔ |
| 电机专用稳压电路 | × | ✔ |
| 固件可升级 | × | ✔ |
| 可调角度金属支架 | × | ✔ |
3. 产品参数
供电参数
- AA电池版本:3.5V-6V,4节AA电池,1.5V干电池或1.2V镍氢电池
- 18650版本:3.5V-4.2V,1节18650可充电锂电池
- 充电口:TYPE-C/MicroUSB
- 充电电压:5V1A
- 电池反接保护:支持
- 电量显示:5段数码管
- 充电显示:数码管(充电中显示红色,充满显示绿色,支持关机充电)
巡线传感器
- 巡线传感器数量:×5
- 巡线传感器校准按钮:×1
- 巡线传感器输出值:开关量/模拟量
- 路口识别功能:4种路口识别:交叉路口、T型路口、右转及直行路口、左转及直行路口
- 芯片内置巡线功能:支持
- 芯片内置巡线速度:1-5,共5个档位
RGB灯光
- WS2812 RGB数量: ×4
- WS2812 RGB灯显示颜色数量:1600万色
- RGB车灯数量:×2
- RGB车灯显示颜色:红、绿、黄、蓝、紫、青、白
光照传感器
- 光照传感器数量:×2
- 数据范围:0-1023
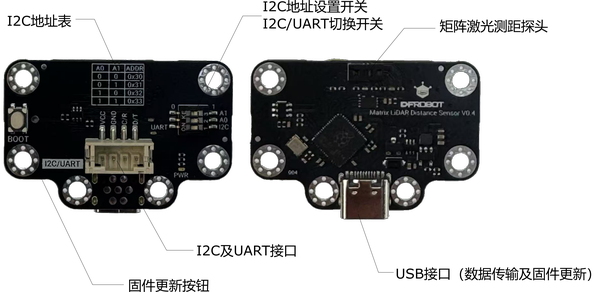
矩阵式激光测距传感器
- 矩阵式激光测距传感器数量:×1
- 供电电压:3.3V-5V
- 数据接口:I2C/UART/USB
- 接口形式:PH2.0-4P(Gravity线序)
- 矩阵数量:8*8 共64个测距点
- 功能模式:矩阵模式/避障模式
- I2C地址:0x30/0x31/x32/x33 四种可调
- 固件更新:USB接口更新
- 测距模式:连续测距
- 测距速度:15Hz
- 测距范围:20mm-4000mm
- 测距精度:
在 20 - 200mm 范围内,白色目标精度为 ±11mm,浅灰色目标精度为 ±12mm,灰色目标精度为 ±12mm;
在 200 - 4000mm 范围内,白色目标精度为 ±5%,浅灰色目标精度为 ±6%,灰色目标精度为 ±6%;
- 测距角度:水平 60°、垂直 60°、对角 90°
- 激光安全等级:符合 Class 1 激光安全标准。
** 电机**
- 电机数量:×2
- 电机型号:N20金属电机
- 电机接口:PH2.0-2P
- 电机供电:独立5V稳压供电
- 电机拆卸方式:螺丝固定与拆卸
编码器
- 编码器数量:×2
- 编码器感应方式:磁感应
- 编码器分辨率:4线编码器
- PID控制:距离与角度控制
- 测速单位:厘米/分钟
** 红外及蜂鸣器**
- 红外接收传感器数量:×1
- 蜂鸣器及开关数量:×1
扩展接口及其它配置
- 金属支架数量:×2
- 金属支架调节轴:1轴
- 金属支架调节角度:270°
- PCB螺纹接口数量:×2
- 固件升级接口及按键:×1
- 扩展GPIO数量:×14
- 底部亚克力保护:×1
4. 安全注意事项
由于Maqueen Plus是STEM教育产品,产品采用的是裸板的方式。所以,在使用过程中需注意以下安全事项:
-
电池的使用需严格遵守电池使用方法及安全事项进行,否则可能会损坏产品以及引起发烫、燃烧等危险。
-
不得用尖锐物体,如螺丝刀等触碰产品,特别是电路板部分,电池部分。以免造成元器件损坏,或发生危险。
-
不得使用金属物体触碰产品的电路板,以免造成短路损坏产品以及引起发烫、燃烧等危险。
-
产品不防水,不能接触水、饮料等液体物质。如不小心将液体倾洒在了产品上,需及时关闭电源,取下电池。待水份完全干后,才能尝试通电。
-
产品收纳时,不能将多个产品堆叠放置在一起,以免造成元件损坏,甚至电源短路发生火灾危险及人员伤害。
5. AA电池使用方法及安全事项
碱性电池
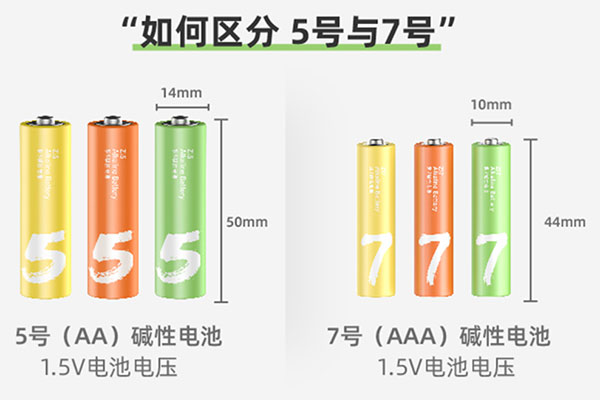
如果你购买的是AA电池版本的麦昆Plus,那么它是支持1.5V的5号(AA)电池和1.2V镍氢充电5号(AA)电池两种规格电池的。购买电池的时候,请注意不要购买成7号(AAA)电池。AA电池在大多数超市均可购买到。需要注意的是,1.5V的碱性电池为一次性电池,不可对其充电,否则可能会发生爆炸或者起火。
可充电镍氢电池
镍氢充电电池是一种比锂电池更安全,不易发生爆炸起火的充电电池,电压为1.2V每节。镍氢电池的尺寸和AA碱性电池一样,麦昆Plus考虑到万一用户误对碱性电池进行充电造成危险,所以没有设计板载充电电路。所以,如果需要使用镍氢电池,你需要购买镍氢充电电池和充电器套装。
注:不论使用何种AA电池,安装的时候均需要注意电池的正负极和电池盒上对应,不可装反。
6. 18650电池使用方法及安全事项
功能说明
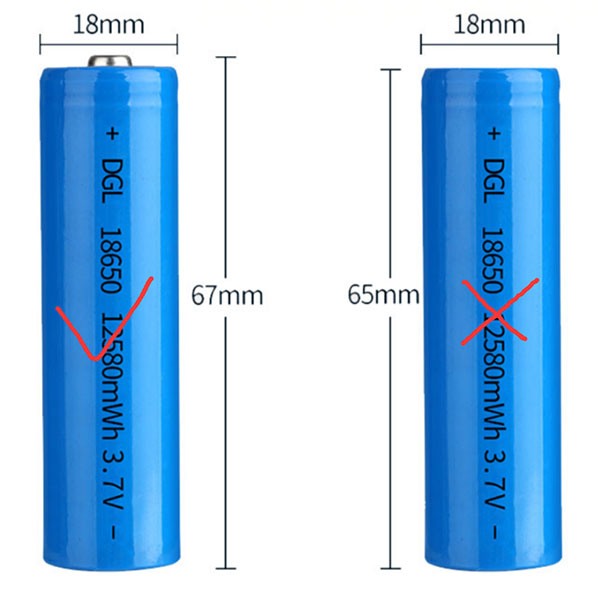
- 麦昆Plus充电电池版本采用3.7V 18650可充电锂电池供电,请勿使用其它型号的电池。
- 支持尖头电池(67mm)、支持带保护板电池。不支持平头电池(65mm,平头电池尺寸太短,可能会接触不良)如图所示:
-
麦昆Plus自带充电功能,使用TYPE-C或者MicroUSB接口对电池进行充电。
-
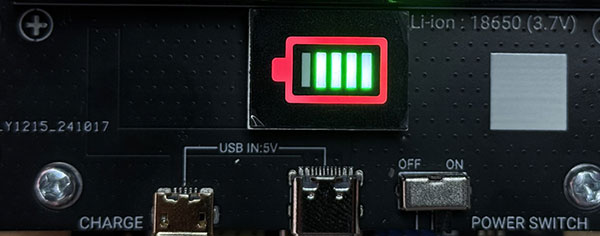
请使用质量有保障的电压5V,电流2A以上的充电头对电池进行充电。目前大部分的手机充电器均可为锂电池进行充电。充电时,电量指示灯的外圈会显示红色,充满后,会显示绿色。如图所示:
-
请勿同时插入MicroUSB和TYPE-C接口充电。虽然Maqueen Plus内部做了相关保护,但这样是不被允许的操作。
-
充电时间约4个小时充满。
18650锂电池安全事项
18650电池是一种大容量电池,需要安装正确的方法使用,否则可能会有发热、爆炸、火灾等安全事故发生。
电池存放的安全事宜
- 电池应保存在阴凉干燥环境下。
- 电池不能放在有水的地方,更不能浸泡在水中。水是导电体,会引起电池短路发热。
- 不能将电池存放在高温或高湿环境下,会加剧电池的反应,导致寿命降低或者容量降低。
- 不能和金属等导电物体放在一起,容易引起电池短路。
- 不能破坏电池的绝缘胶纸,容易引起电池短路。
- 长时间不使用18650电池,应当将电池从设备上取下后用绝缘盒存放,如不便于取出电池的设备, 要关闭设备电源总开关,避免放置不当导致电池短路。
- 电池应该保存在儿童不容易拿到的地方,避免发生安全事故。
- 14岁以下人群应在成年人的指导和监督下使用18650电池。
电池使用的安全事宜
-
在麦昆Plus的使用过程中,不允许用任何导电物体,如镊子、钳子、螺丝刀等触碰电路板和电池部
分,以免引起短路损坏设备或引起危险。 -
使用完成后,需及时关闭电池板上的 “POWER SWITCH” 电源开关,长期通电可能会造成设备损坏、电池过放电,甚至短路引起火灾等危险。
-
18650电池在使用时是需要区分正负极的,如果错误安装可能会导致设备的损坏、起火、爆炸等危险。
重要安全提示:18650电池的整个圆柱体都是负极,在18650电池的圆柱体面,包裹了一层绝缘胶纸,请勿将胶纸损坏。胶纸损坏会露出负极金属面,当圆柱体的金属面被金属物体碰到正极的时候,电池就会发生短路。请勿尝试将任何负极位置和正极位置用螺丝刀、镊子等金属物品短接!任何电池短路都会引起发热、起火甚至爆炸等危险!
**电池安装的安全事宜 **
- 注意看麦昆Plus上的18650电池板,在电池板上的多个地方都标识了正极和负极,见下图所示:

- 安装电池前,请注意标识为“POWER SWITCH”的电源开关需要拨到“OFF”侧,关闭麦昆Plus电源。如图所示:

- 安装电池时,电池的 “+” 标识朝电池板的 “+” 标识方向,“-” 朝着 “-” 标识方向。并在电池上套入电池易拉带。见下图所示。

需老师安装或在老师指导下安装18650电池,请勿让儿童或者学生自行安装18650电池,以免引起危险。
6.2.4 电池拆卸的安全事宜
当你需要将18650电池从麦昆Plus上拆卸下来的时候,请务必注意以下几点:
- 请勿用手指直接扣取电池。为了保证电池的可靠接触,18650电池盒安装的很紧,直接用手指扣取的话,容易造成对指甲盖的严重伤害。

- 请勿用任何尖锐物体如螺丝刀撬电池,容易引起电池短路、爆炸、伤害你的眼睛及身体。

- 取出电池需使用“电池易拉带”,轻轻将电池拉出电池仓。

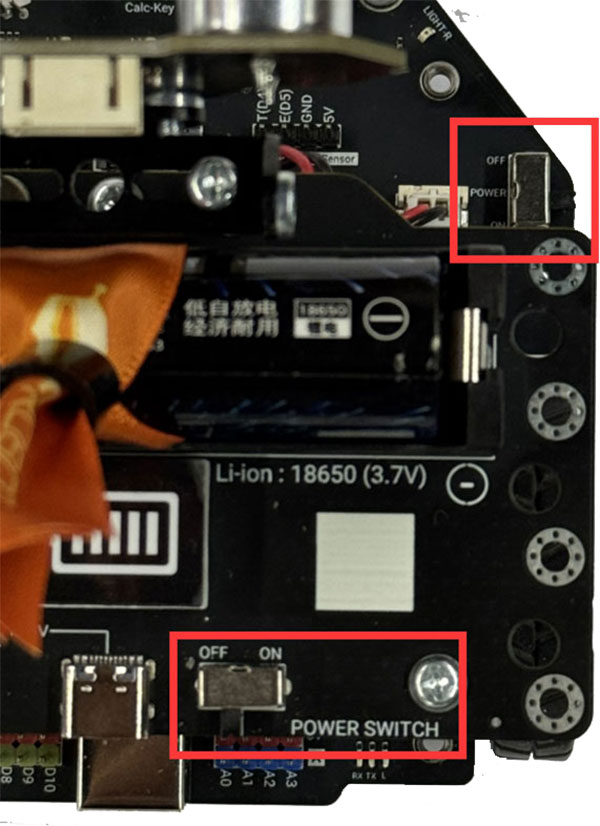
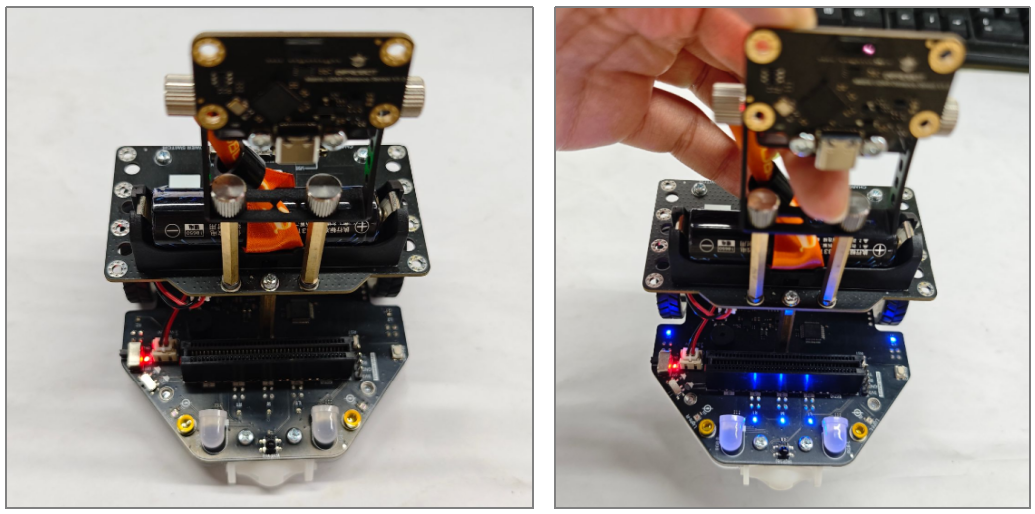
7. 电源开关
- 麦昆Plus为了使用的安全,设置了两个电源开关。分别位于电池板和小车底板上,需要两个开关都打开后才能正常运行。如图所示:
8. 电池板及金属支架安装方法
麦昆Plus V3为了让学生有一定的装配体验感,所以在生产时并未安装电池板和金属支架。具体安装方法如下:
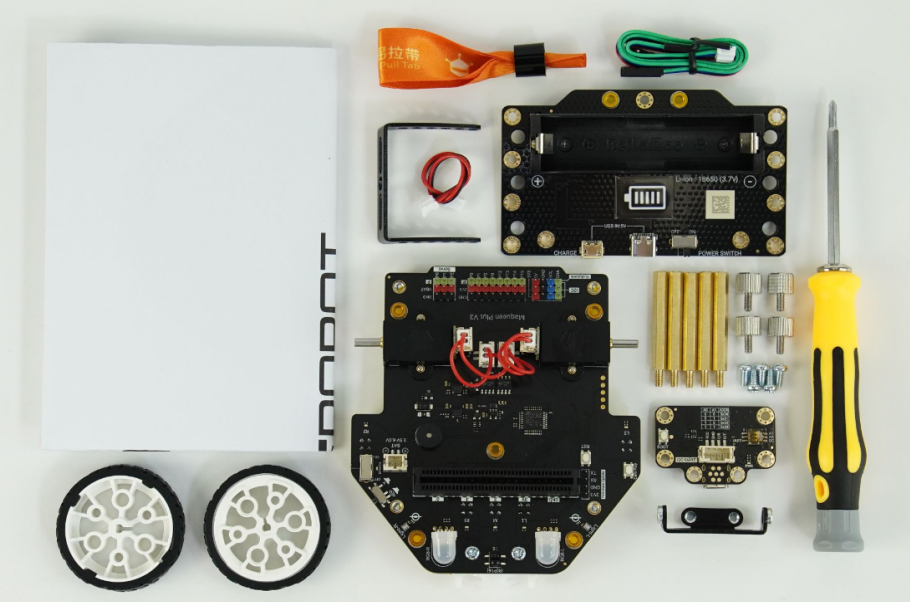
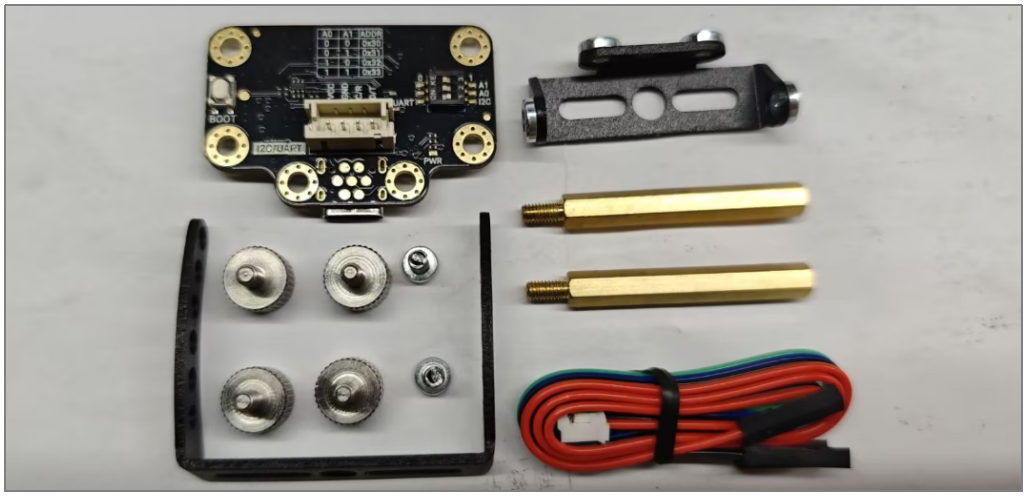
8.1 清点装备
清点装备时,可以按照图上的硬件清单进行比对清点,这里就不对每个模块标名称了。
8.2 组装步骤
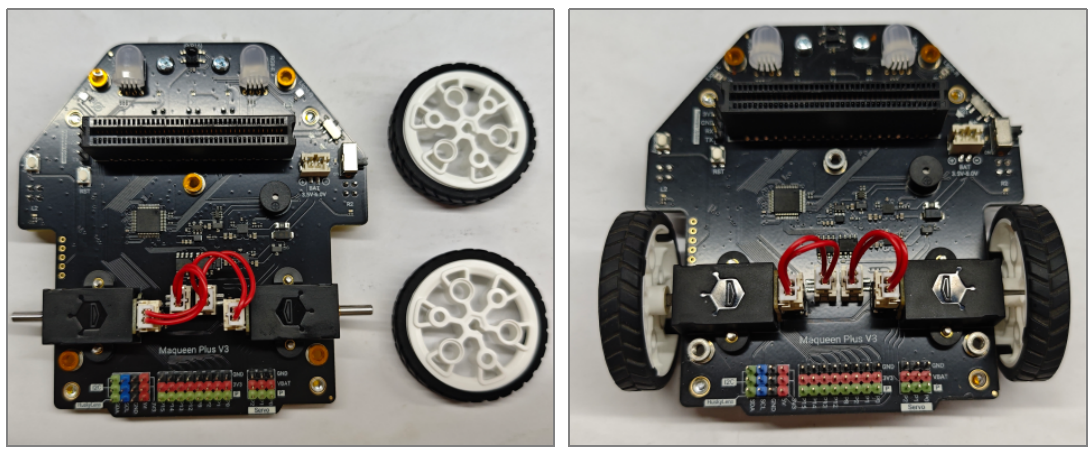
- 组装车轮
将车轮对准电机轴插入,确保轮轴完全卡入电机轴。手动旋转车轮测试是否顺畅,无摩擦或偏移。需注意电机线与控制器接口连接(电机线出厂时已安装好,检查是否连接无误)。
注意:使用时不能频繁用手转动车乱,以免碳刷过度磨损导致电机使用寿命缩短。
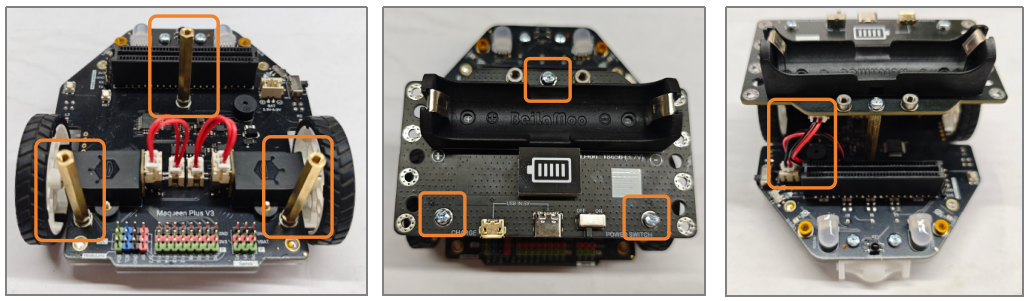
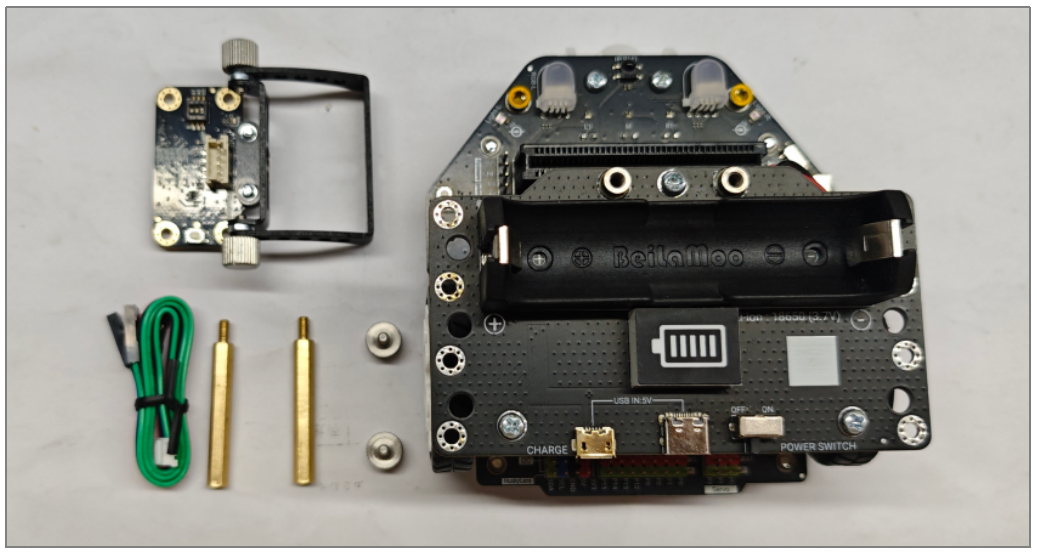
- 组装电池板
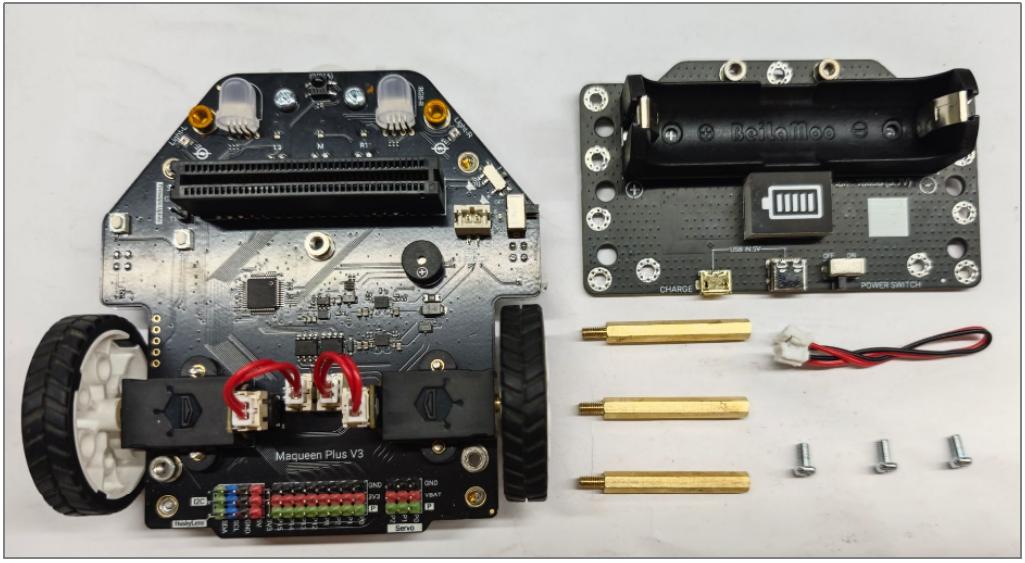
将铜柱安装在小车底板的指定固定位置(需对齐孔位);然后使用M3螺丝将电池板固定在铜柱上;用电源连接线将电池板与小车底板接口相连。
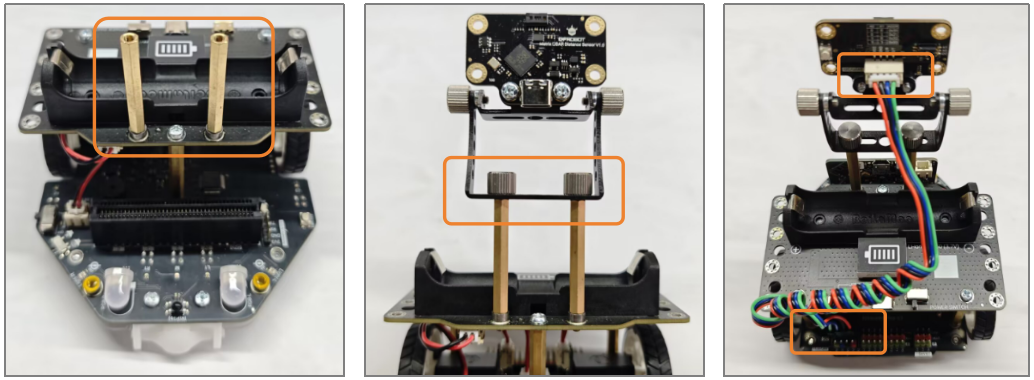
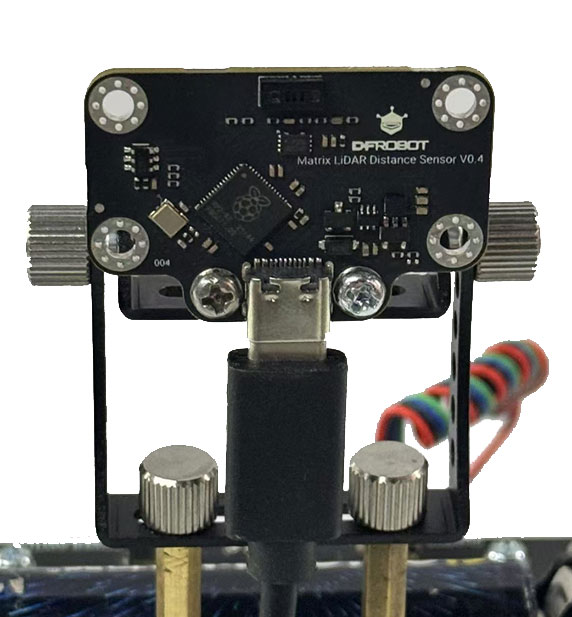
- 组装矩阵激光测距模块
模块安装
使用M3螺丝将矩阵激光测距模块固定在专用支架上,需要注意一下矩阵激光测距模块的方向。
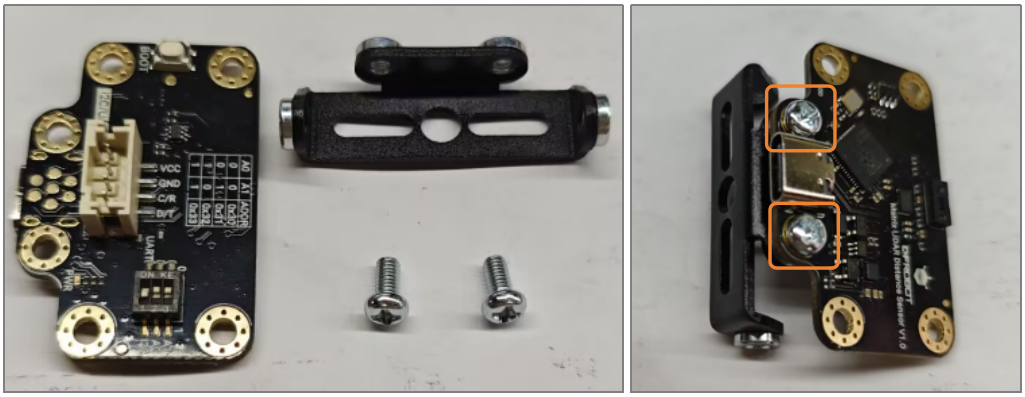
使用手拧螺丝,固定支架与拓展支撑架。
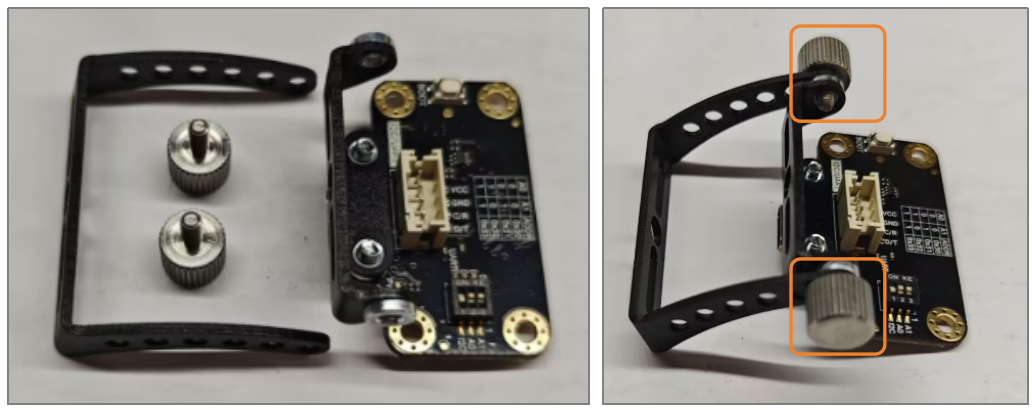
支架安装
将铜柱固定在电池板上;然后使用手拧螺丝将支架固定在铜柱上。最后,使用I2C连接线,将模块接入小车底板的I2C引脚。
注意:连接线的颜色顺序需要和引脚的颜色对应。
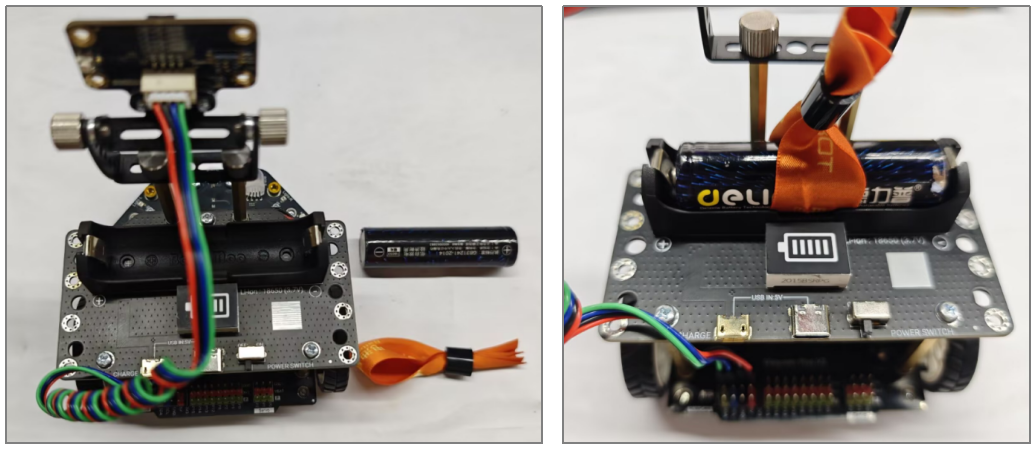
- 组装电池
将电池放到电池易拉带中,然后连同易拉带将电池放入电池槽,确保电池的正负极(+/-)与电池槽中的标识对齐。
特别注意:套件中不含电池,需自备18650锂电池。
8.3 整体测试
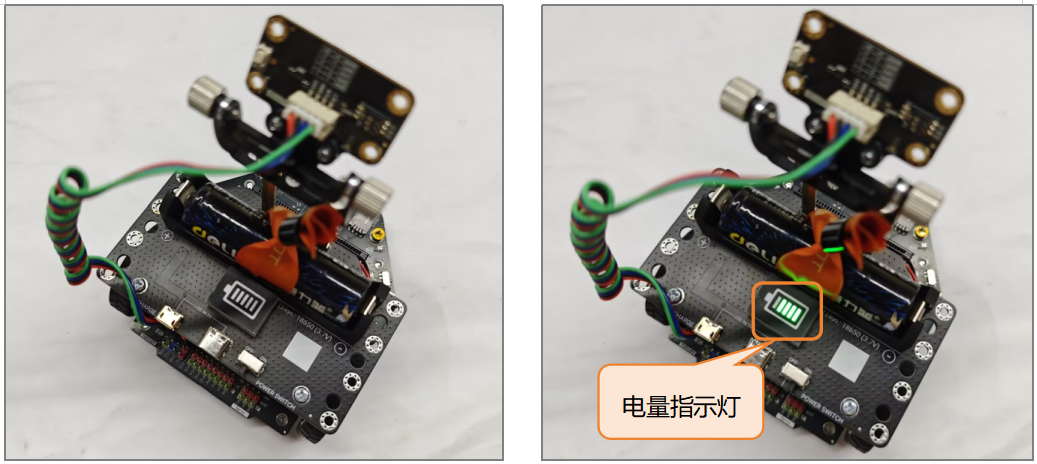
- 电源测试
打开电池板上的电源开关,检查电量指示灯是否亮起。
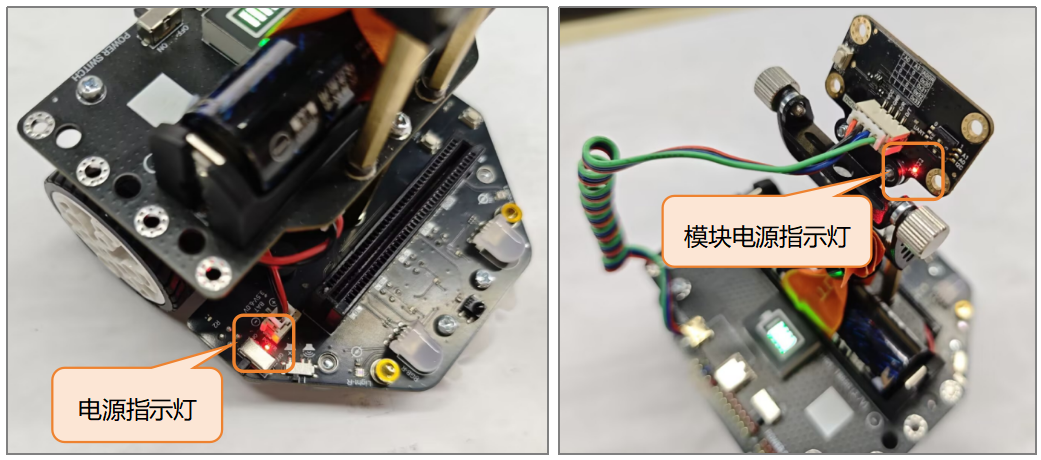
打开小车底板电源开关,查看底板电源指示灯与矩阵激光测距模块的电源指示灯是否亮起。
- 传感器检测
抬起小车,观察5路巡线传感器的蓝色指示灯是否全部亮起,若所有的指示灯正常,则组装成功。
9. 巡线校准方法
巡线传感器在出厂前已经完成过校准,通常情况下你无需校准。当你使用不同材质的地图,如果发现巡线传感器不能正确识别黑色线条时,可尝试进行巡线校准。方法如下:
- 将巡线传感器的5个探头同时放在黑色区域。(要确保5个探头都在黑色区域)
- 打开麦昆Plus的电源。
- 长按 “Calc-Key” 按键约2秒,巡线指示灯开始闪烁,然后松开按钮,校准完成。
- 检验校准结果:将巡线传感器放到白色底上,巡线指示灯灭,放到黑底上,巡线指示灯亮,校准正确。
注:巡线传感器采用了灰度检测的方式进行黑色线条的识别,所以,不是所有的黑色线条都能别有效识别,对于无法识别的材质,即使校准也无法正确识别。例如:部分激光打印的地图无法识别。
10. 电机更换方法
麦昆Plus V3采用了可更换电机的设计,如果因为高强度的使用,或者摔坏了电机,可采用如下方式进行电机的更换。
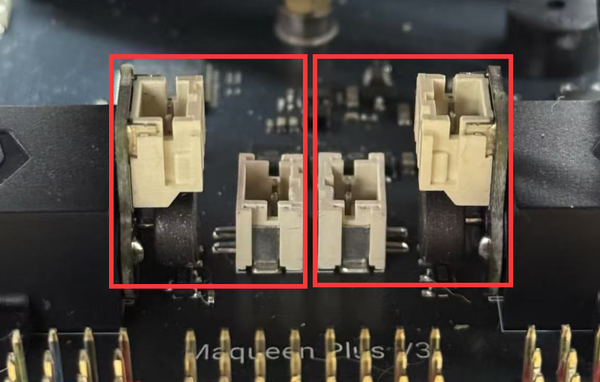
10.1 拆除电机
- 关闭麦昆Plus V3的电源。
- 拔掉两个车轮。
- 拔掉电机上的连接线。如图所示:
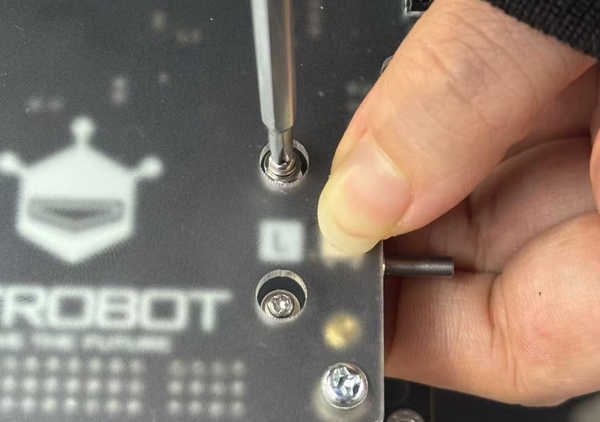
- 使用螺丝刀拧下底部4颗电机螺丝。如图所示:

10.2 安装电机
- 将卡扣装在电机上,如图所示:

- 将电机安装到底板上,如图所示:
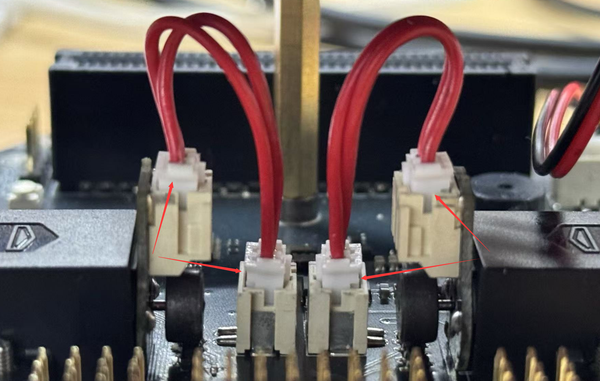
- 装上连接线,该位置不是很好安装,需要一些耐心,如图所示:
- 装上轮子,安装轮子的时候需注意电机轴的平面对齐轮子的平面,避免安装不上或损坏轮子轴孔。如图所示:

11. MakeCode示例教程
11.1 MakeCode基础操作
-
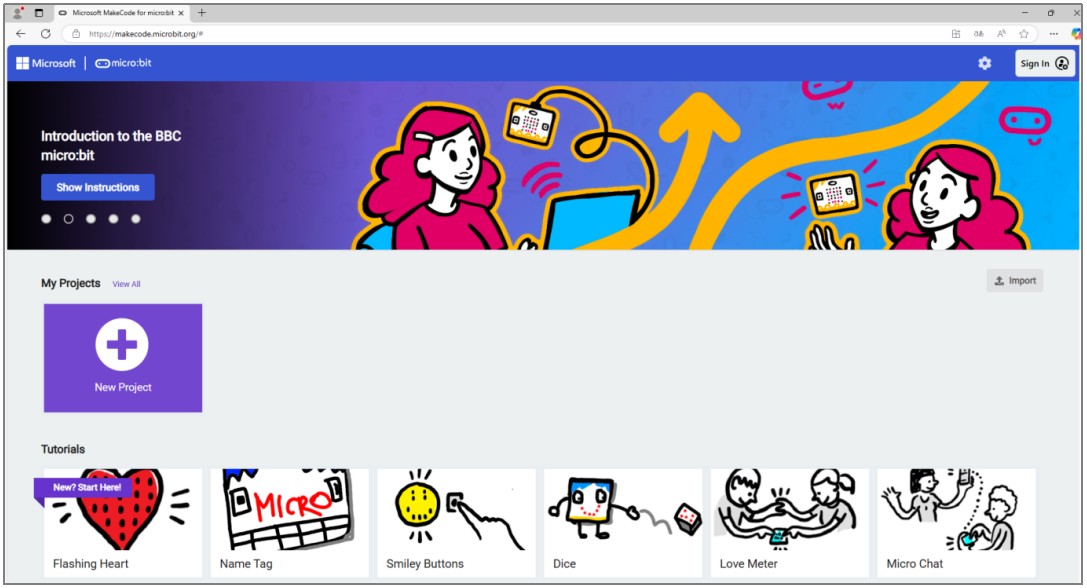
打开浏览器,在浏览器的地址栏输入:https://makecode.microbit.org,
-
首次访问会加载约10秒,耐心等待界面初始化完成。
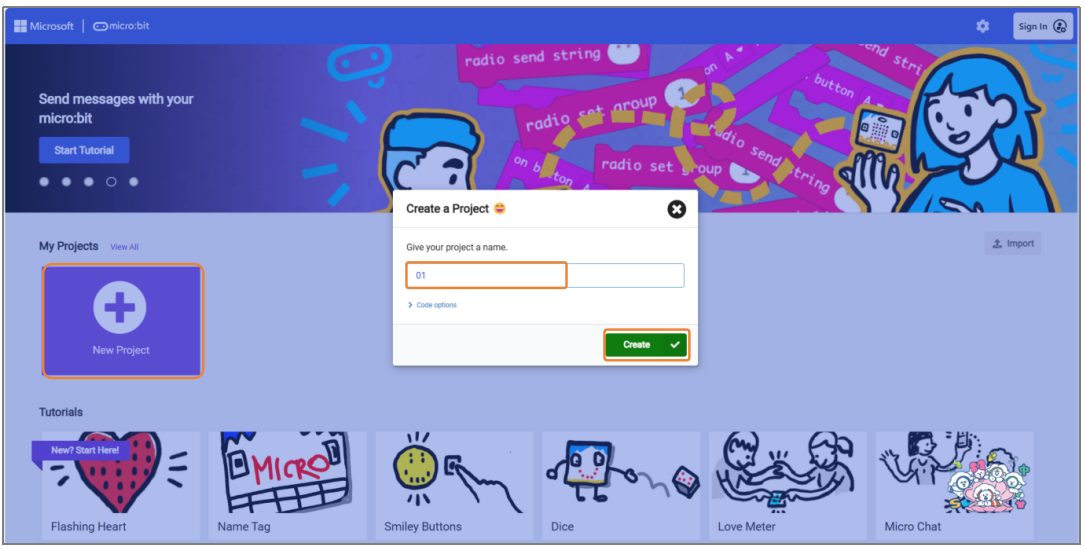
- 点击“新建项目”,新建项目并命名为“01”,点击“完成”,完成项目创建。
- 项目创建成功后,进入MakeCode编程界面,界面示意图如下:

11.2 搭建编程环境
-
示例程序中,主要是通过编程,控制Maqueen Plus V3小车完成不同的项目,因此有一个很重要的操作,就是搭建编程环境。
-
在积木区,点击“Extensions”,在新的界面中,输入“DFRobot”进行搜索,找到“DFRobot_MaqueenPlus_v20”,并点击完成库的添加。
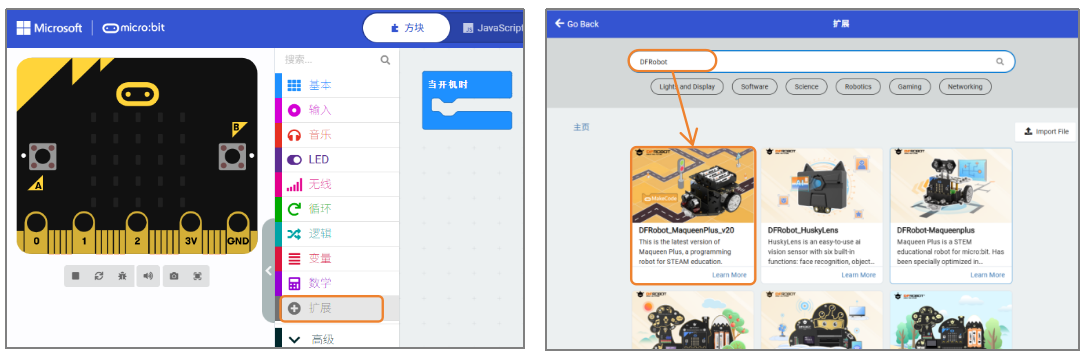
- 库添加完成后,积木区生成新功能的积木。

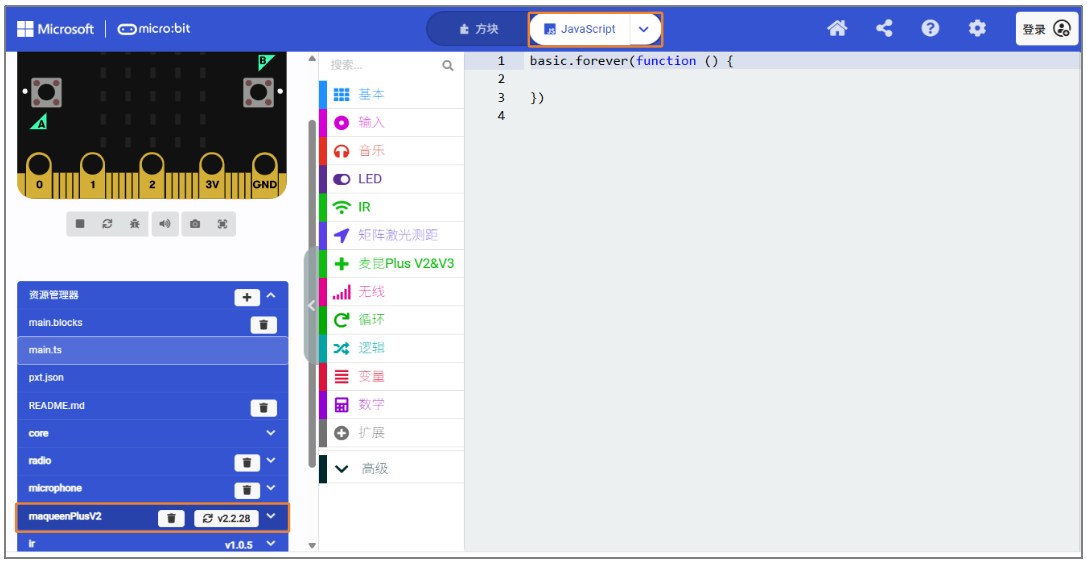
- Maqueen Plus的库添加成功后,切换到JavaScript编程方式,查看一下库的版本号是否为v2.2.17及以上。
11.3 启动麦昆Plus V3
功能说明
- 在该示例中将用到电机驱动和车灯控制的black。
- 麦昆Plus以100的速度前进。并且,车灯按一秒的频率闪烁。
示例1:启动麦昆Plus V3
说明:
- 前进的速度范围为0-255,并非0-100,这也是PWM脉宽的范围。
- 速度在30以内,小车可能不会动,请将速度设置为30以上。原因是电机采用PWM驱动的方式,速度较低的情况下,驱动力会不足,所以速度在30以下时,驱动力太弱,导致小车几乎不动。
- 车灯是配置的RGB灯,可采用两种方式点亮,一种是打开和关闭,这时只能显示红色,另外一种可显示7种颜色,本程序采用的是第一种。
程序链接:https://makecode.microbit.org/_1KMKMqi6YWsd

11.4 转弯及RGB灯控制
功能说明
- 在该示例中,将用到电机驱动、车灯、底部RGB灯、蜂鸣器的black 。
- 小车会一会儿右转,一会儿左转。
- 底部RGB灯会以彩虹色点亮。
- 左侧车灯亮绿色,右侧车灯亮紫色。
- 蜂鸣器会持续响起音乐。
示例1:小车转弯并点亮底部RGB灯
说明:
-
底部的RGB灯亮度可调,范围为0-255。
-
本示例中,底部RGB灯使用了彩虹色的显示方式,其中1-360为彩虹色的显示范围,可尝试调节数值观察颜色的变化。
-
麦昆PlusV3的底部RGB灯设置在P1引脚,所以在程序中,需要将默认的P15修改为P1(V2为P15引脚)。
-
本示例中,车灯使用了V3独有的车灯RGB颜色控制,让车灯显示两种不同的颜色。
-
micro:bitV2板载了蜂鸣器,如果你使用的是mirobitV2的话,你可以打开内置扬声器,启动micro:bit板载扬声器。
-
通过设置左右电机的速度,即可让小车转弯,如果让一侧电机正转,一侧电机反转,甚至可以原地打转。
程序链接:https://makecode.microbit.org/_ejPPVsACU8FK

11.5 快速开启巡线
说明
快速巡线功能是麦昆PlusV3的独有特色功能。它将巡线功能做到了底层芯片上,学生仅用一个black即可使用巡线功能,降低了巡线门槛。这不仅使基本巡线不再决定比赛成败,还能推动设计更丰富、有创意的比赛任务玩法,引导学生将精力投入到巡线以外的任务点上。同时,因巡线算法内置在底层芯片,相当于多了一个独立运算内核,micro:bit 可在巡线同时实现更多功能,如避障、闪灯、播放音乐、读取传感器等,互不干扰。
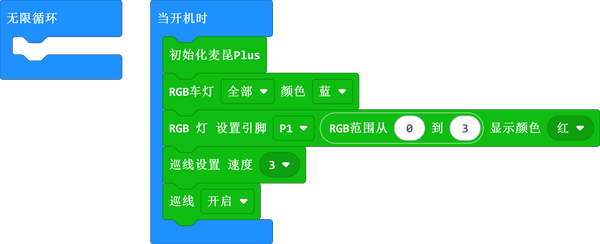
- 让2个车灯显示蓝色。
- 让底部RGB灯全部显示红色。
- 设置巡线的速度为3 ,然后开启巡线。
示例1:快速巡线
说明:
- 车灯采用彩色控制方式,可显示红、绿、黄、蓝、紫、青、白共七种颜色。
- 底部RGB灯采用范围控制方式,该方式可独立控制每一个灯显示的颜色。示例中从0号灯到3号灯都亮红色。
- 巡线速度范围为1-5个速度等级可选,1的速度最慢,5的速度最快。
- 该巡线功能内置在了最底层芯片上,仅需开启一次后,即可一直巡线,中途也可以根据情况关闭巡线。
程序链接:https://makecode.microbit.org/_P7HKPV54PehD
11.6常规巡线程序
说明:
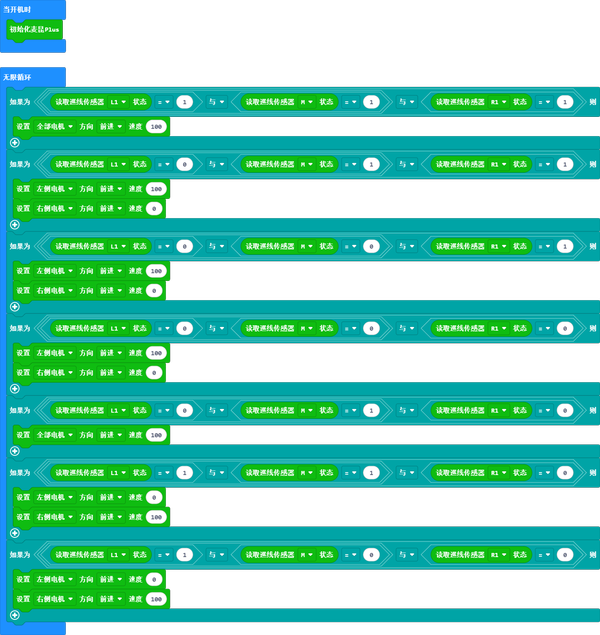
麦昆Plus V3板载了5颗灰度传感器,当检测到黑线时,输出状态的值为1,未检测到黑线时,输出状态为0。利用传感器对黑线敏感的特性,用于巡线行驶。
示例1:巡线机器人
说明:该示例演示了读取3颗巡线传感器的状态的方法实现巡线的功能。
程序链接:https://makecode.microbit.org/_V8xD5XKJj89z
示例2:读取巡线传感器模拟量的值
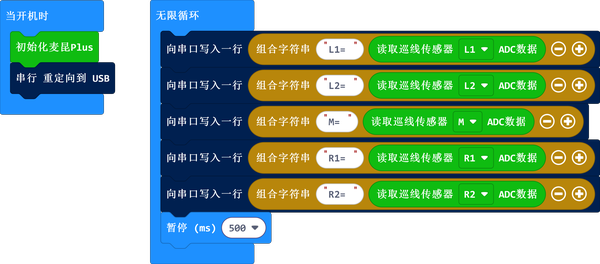
说明:
该示例演示了如何读取巡线传感器的模拟量,并在电脑上显示。通过模拟量的读取,可直观的看到巡线传感器在黑色线条上的值和白底上的值之间的差异。同时,也能将不同模拟量的值用于不同的指令控制。
程序链接:https://makecode.microbit.org/_Mw0LU8RxsFVb
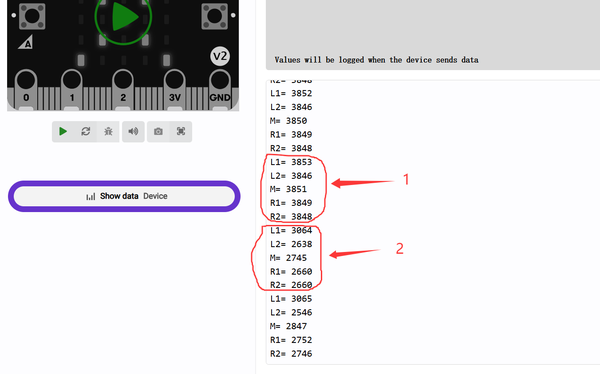
读取结果:
下图中1号数据为白底,约3800左右,2号数据为黑底数据,约2700左右。两种不同的底色,模拟量相差了约1100,通过差值,即可区分黑色和白色。
11.7 光线传感器-避光和追光机器人
说明:
麦昆PlusV3在前方的左右侧各内置了一个光线传感器,该传感器能检测光线的强度。通过两侧光线的强度不同,可以让小车避开光线或者跟着光线的方向行驶。
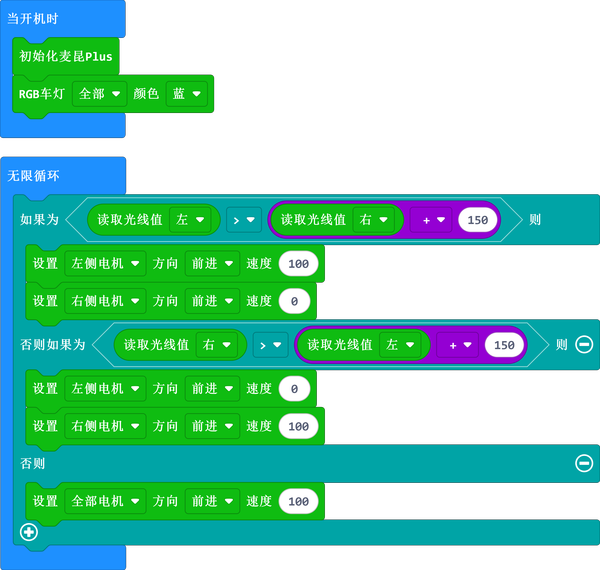
示例1:避光机器人
程序说明:
- 开机时让车灯显示蓝色。
- 读取左右两个光线传感器的值,如果左侧大于右侧150以上,则小车往右转弯,避开光线。
- 如果右侧大于左侧150以上,则小车往左转弯,避开右侧光线。
- 如果两侧的光线值差距小于150,则小车前进。
程序链接:https://makecode.microbit.org/_C6C8o4atEhdK
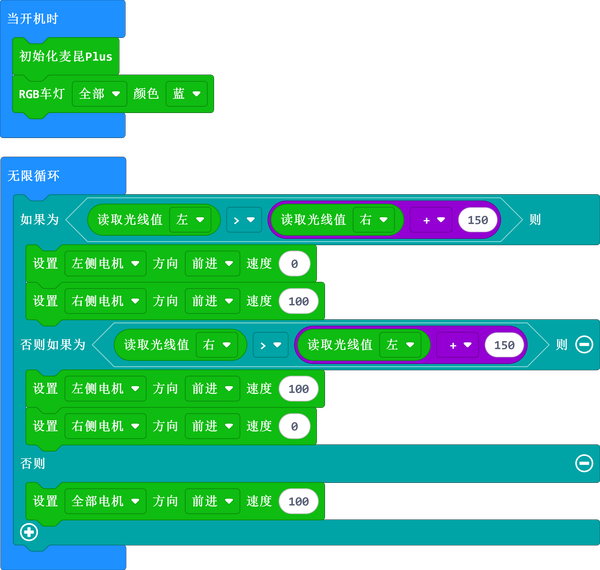
示例2:追光机器人
说明:
- 开机时让车灯显示蓝色。
- 读取左右两个光线传感器的值,如果左侧大于右侧150以上,则小车往左转弯,跟着光线行驶。
- 如果右侧大于左侧150以上,则小车往右转弯,跟着光线行驶。
- 如果两侧的光线值差距小于150,则小车前进。
程序链接:https://makecode.microbit.org/_WKAcLVAb8dRf
11.8 红外线遥控
功能说明
麦昆Plus内置了红外接收传感器,它连接在micro:bit的P16引脚。可接收来自于红外遥控器的发射信号。通过识别红外遥控器不同按键的值,可让小车执行不同的动作,用于遥控机器人等功能。
位置如图:
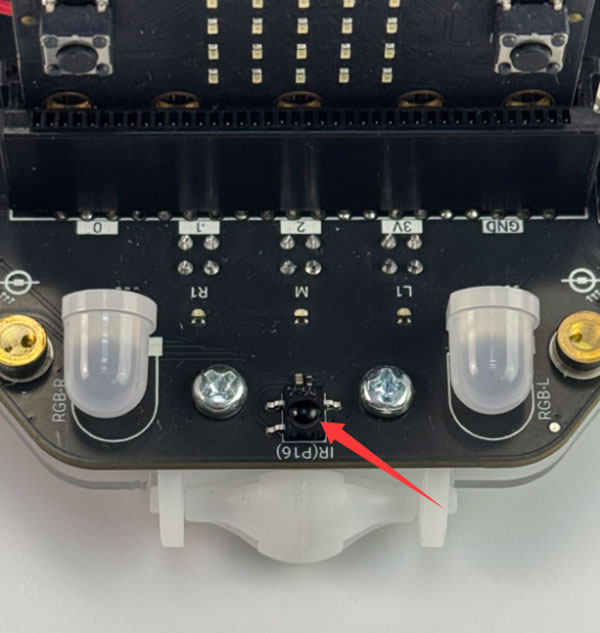
麦昆Plus V3默认未配红外遥控器,如需使用该功能,请联系销售人员单独购买。
下表是红外遥控器的按键及对应键值,供参考:

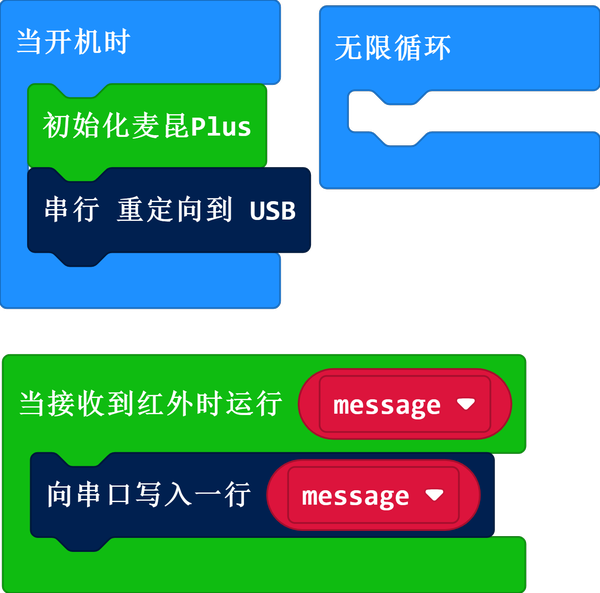
示例1:读取红外遥控器的值
程序说明:
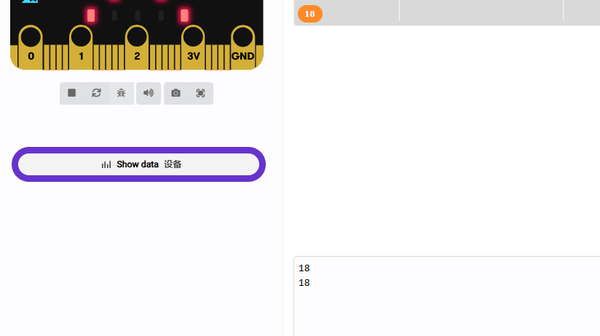
该示例演示了在串口监视器上显示接收到的红外遥控器的键值。键值以10进制的方式显示。
程序链接:https://makecode.microbit.org/_YtsLyx2FXfua
将遥控器对着红外接收传感器,按下任意按键,如图所示:

然后会出现如图所示的按钮,点击该按钮,进入数据展示页面:

尝试按红外遥控器的其它按键。对应的键值就会显示在页面上,如图所示:
示例2:红外遥控小车
程序说明:该示例演示了如何用红外遥控器控制小车前进、转弯和停止。
程序链接:https://makecode.microbit.org/_LAeTMtfvfi8k

11.9 路口识别
说明
麦昆Plus V3芯片级内置了路口识别功能。能识别黑色线条上的交叉路口、T 型路口、左转及直行路口、右转及直行路口。如下图所示。通过对不同路口的识别,能设置小车在巡线的过程中走不同的路线。
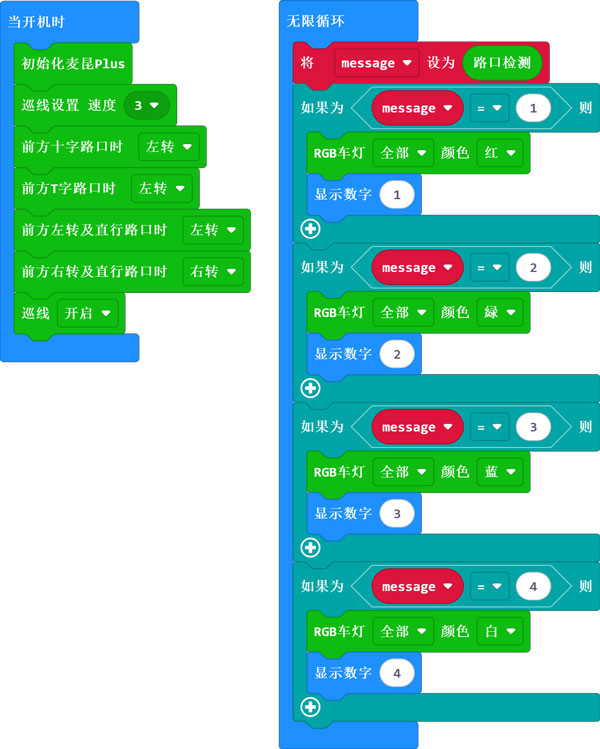
示例1:设置模式下识别路口
什么是设置模式?
设置模式是指对路口的检测,及小车执行方式提前设置,这种方式的优点是可在程序的 “当开机时” 下设置一次,小车即可一直按设置的方式在后台进行工作。无需在循环程序内反复调用。
优点:
能大幅度的降低程序设计的难度,减少程序资源的占用。
缺点:
- 设置模式下的路口识别功能只能在内置巡线模式下使用。其它模式下无法使用。
- 如果需要做比较复杂的应用,需要多次使用和尝试,才能理解其功能的使用方法。
说明:
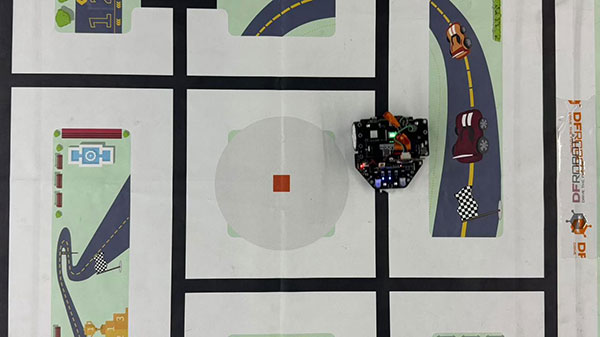
- 在如下图这类具有各种路口的巡线地图中,让小车按照设定的路线行驶。在本例中,小车围着方框行驶。
- 在该模式下,仅需设置一次,即可在底层芯片上持续运行。无需在循环中反复设置。
程序链接:https://makecode.microbit.org/_0b7V7f1L18hg

示例2:查询模式下路口识别
什么是查询模式?
查询模式是指在循环的程序中不断的查询当前路口的状态,并实时返回路口状态的情况。和使用传感器读取模块的方法相似。
优点:
使用灵活,可独立使用,无需和内置巡线功能绑定。
缺点:
必须在循环程序内一直读取数据,且程序内不能有“delay”否则可能会漏掉数据。
说明:
本示例演示了小车在巡线的过程中,识别到路口后,microbit点阵显示对应的数字,车灯显示不同的颜色。
程序链接:https://makecode.microbit.org/_RXL8PpJ5k1Vg
示例3:沿指定路线行驶

说明:
这是一个综合应用的例子,使用了查询模式、设置模式、内置巡线三种功能。应用实现的功能如下:
就像汽车导航一样,在如上图的地图中,让小车沿着图示中的红色剪头方向行驶。
在路线中,小车需要经过3次交叉路口、两次T型路口、两次右转及直行路口,但转弯的方向可能不一样。在程序中就需要及时的调整路口的前进方向。
执行流程:
- 前方遇到第一个交叉路口直行。并且,在前方如果再一次遇到交叉路口时就左转。
- 经过了十字路口后,来到了T型路口,此时,小车需要右转。
- 在T型路口右转后,前方又来到了一个交叉路口。此时,小车左转。
- 左转后很快又遇到一个T型路口,依然右转。
- 转过一个弯后,前方遇到一个右转及直行路口。此时右转。
- 右转完成后,接着又是一个右转及直行路口,此时直行。
- 接着,就回到了第一个交叉路口。此时,小车停止巡线。
程序链接:https://makecode.microbit.org/_86eUF28LEAyH

11.10 矩阵激光测距传感器
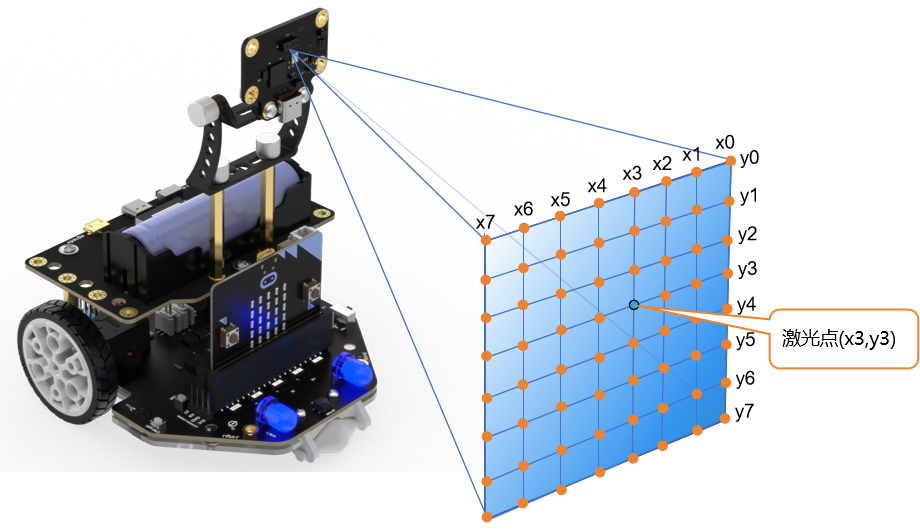
麦昆Plus V3标配了矩阵式激光测距传感器,激光测距的精度、速度和稳定性都大幅度优于超声波测距。该传感器采用8*8共64路激光束测量点,能测量60°夹角范围内的64个点位距离值。能获取前方障碍物距离的同时,还能获取障碍物的位置。
| 对比项 | 矩阵激光测距传感器 | 超声波传感器 |
| 测距原理 | 发射激光,测量激光来回时间(TOF 飞行时间测距) | 发射超声波,测量回波时间 |
| 测量范围 | 角度范围内64个点位准确测量其不同位置的距离(角度范围内,多点位测量) | 角度范围内测最近点声波返回的距离(角度范围内,单点位测量) |
| 测量精度 | 高(毫米级) | 中低(厘米级) |
| 测量频率 | 高(激光速度快,帧率快,适合动态度) | 弱(声波速度慢,帧率低) |
| 抗干扰能力 | 强(不受风、湿度、声音干扰) | 弱(容易受温度、湿度、声波干扰) |
| 空间感知力 | 强(能“看到”不同方向的障碍和结构) | 弱(只能测量一个方向是否有物体) |
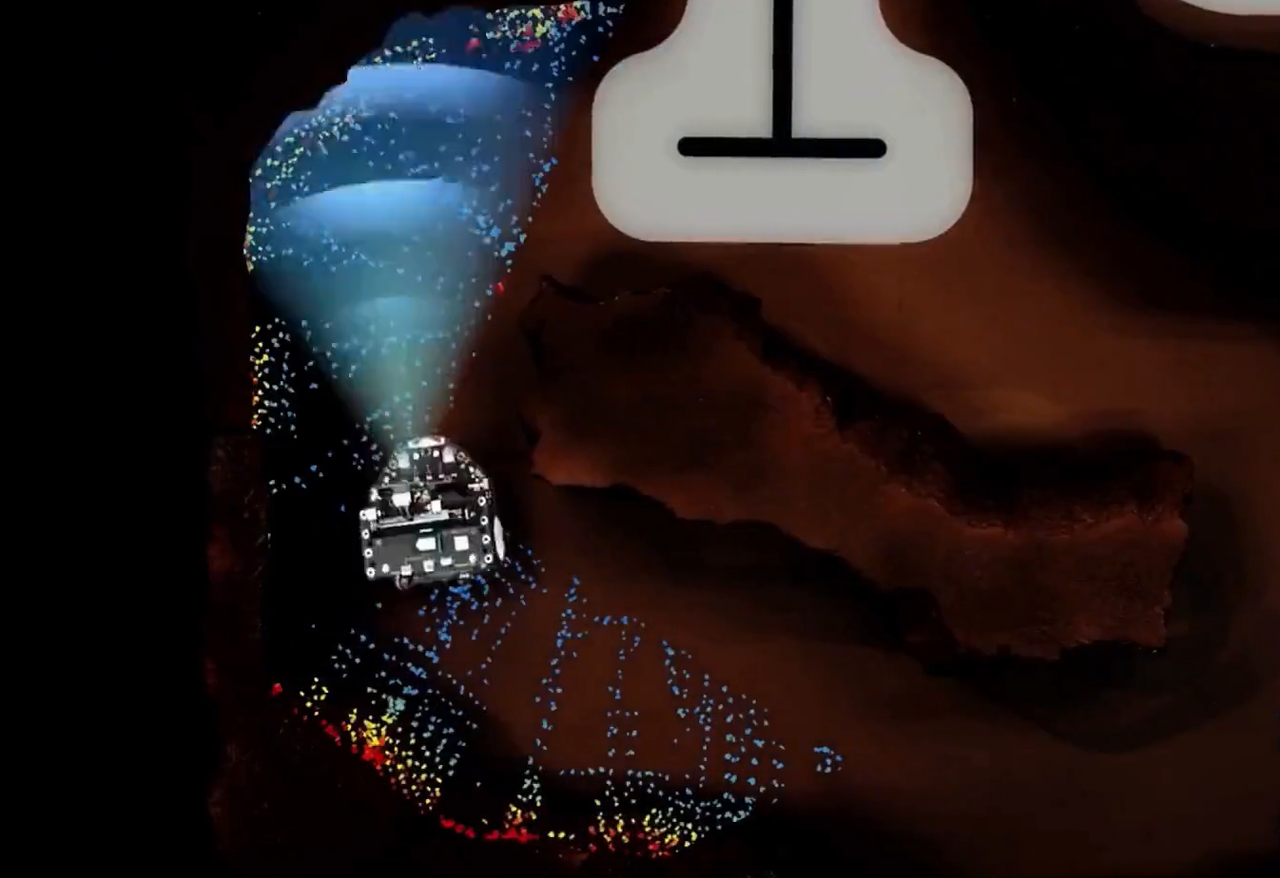
| 可视化能力 | 可生成“热力图”、空间映射、地图建模 | 仅一个距离,无法生成图像 |
| 复杂目标识别 | 可检测多个物体、位置、形状 | 只能感知最前面的障碍物 |
功能说明
矩阵激光测距传感器,是一种基于 ToF 技术的测距传感器模块。它可以在同一时刻内测量 8 行 x 8 列 = 64 个方向上的距离,测量角度范围为60°夹角。
简单的来说,这就像我们人用眼睛看前方不同的方向——左边、中间、右边、上边、下边——这个激光传感器就像有64只“小眼睛”,一起在扫描前方一个扇形区域。
每只“小眼睛”发出一束激光,遇到障碍后反射回来,计算时间差就能得出距离。也就是这个传感器每次测量时,会像一个小型雷达一样,快速地在前方60°扇形区域内发射64道激光束,每束光都有一个独立的距离值。
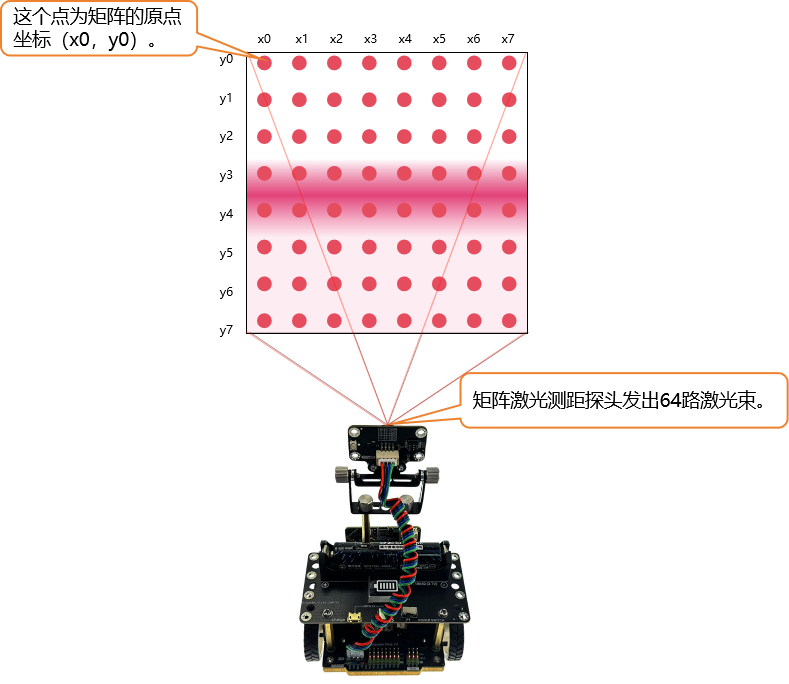
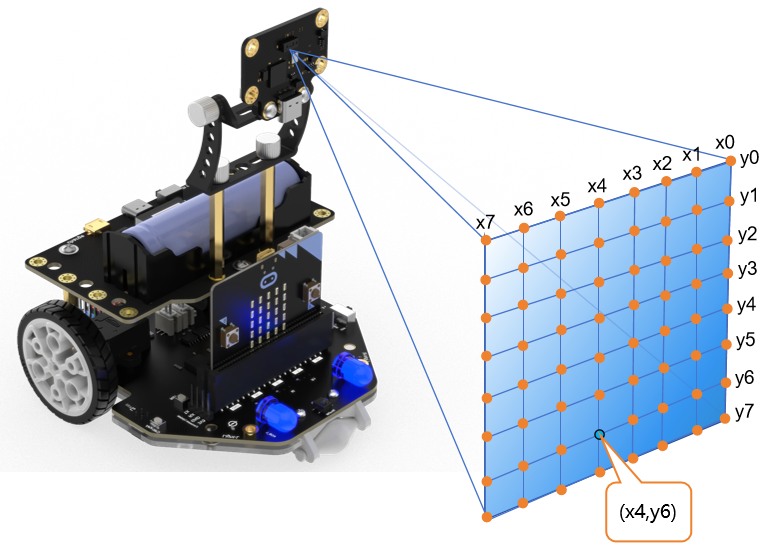
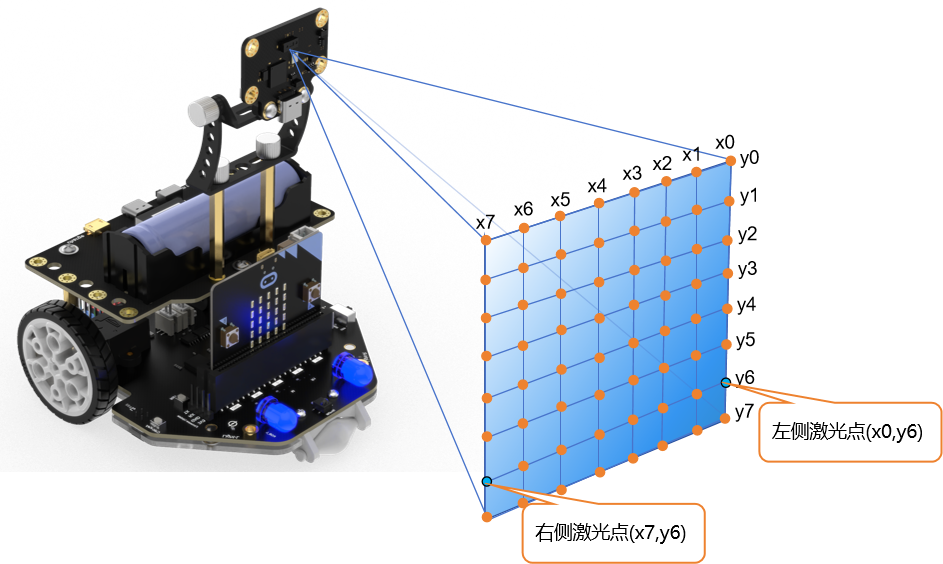
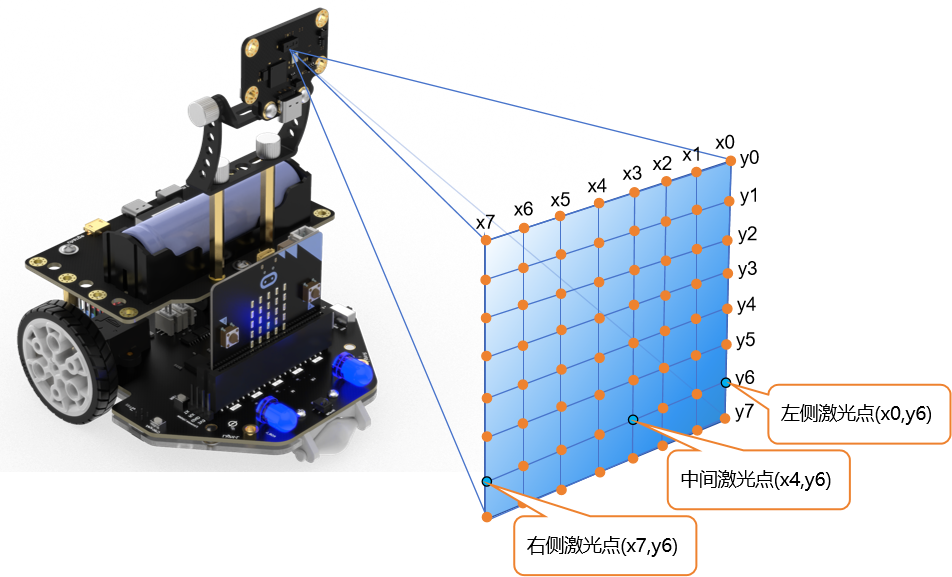
矩阵激光束平面排布示意图
矩阵激光测距探头发出64路激光束,并且以矩阵左上角的点为原点。
注意:图中所示的激光束和点位仅为可视化示意,实际使用中激光为不可见光,肉眼无法看到。
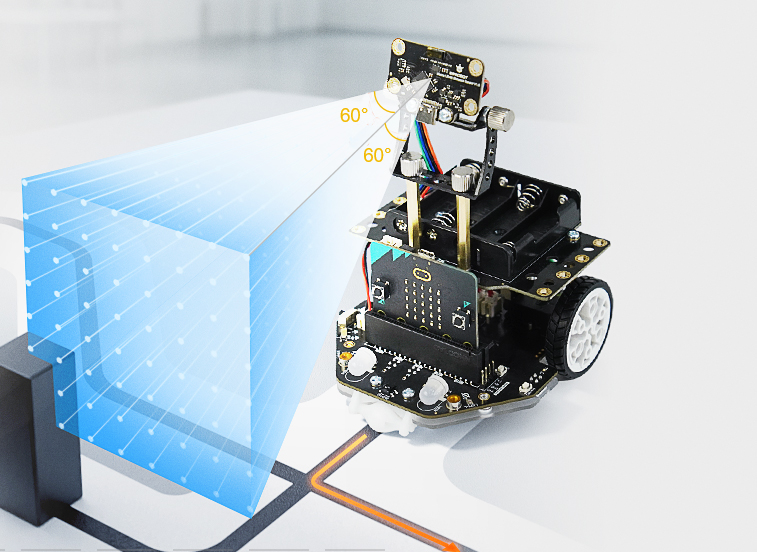
矩阵激光束测量角度示意图
矩阵激光束测量角度的范围为60°夹角。
Makecode示例教程
矩阵激光测距传感器提供两种不同的测距模式:矩阵模式、避障模式。
| 模式 | 示意图 | 返回数据 | 适合什么时候用 |
|---|---|---|---|
| 矩阵模式 | 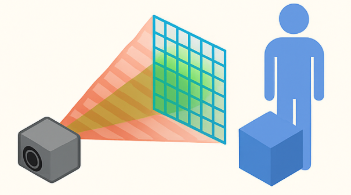 |
返回8x8距离矩阵(共64个值)。 | 想知道前方每个方向有多远,可以做地形图、找物体、做视觉识别。 |
| 避障模式 | 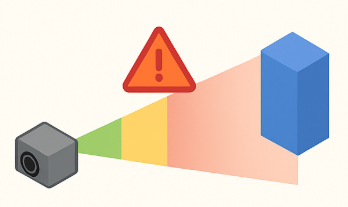 |
只能检测正前方、左前方、右前方的障碍物有多远。 | 只关心“前方有没有障碍物”,比如让小车别撞墙。 |
注意:避障模式当前为测试功能,可能存在错误或体验方面的问题。后期可能会大幅度修改或删除该模式,请谨慎使用该功能。
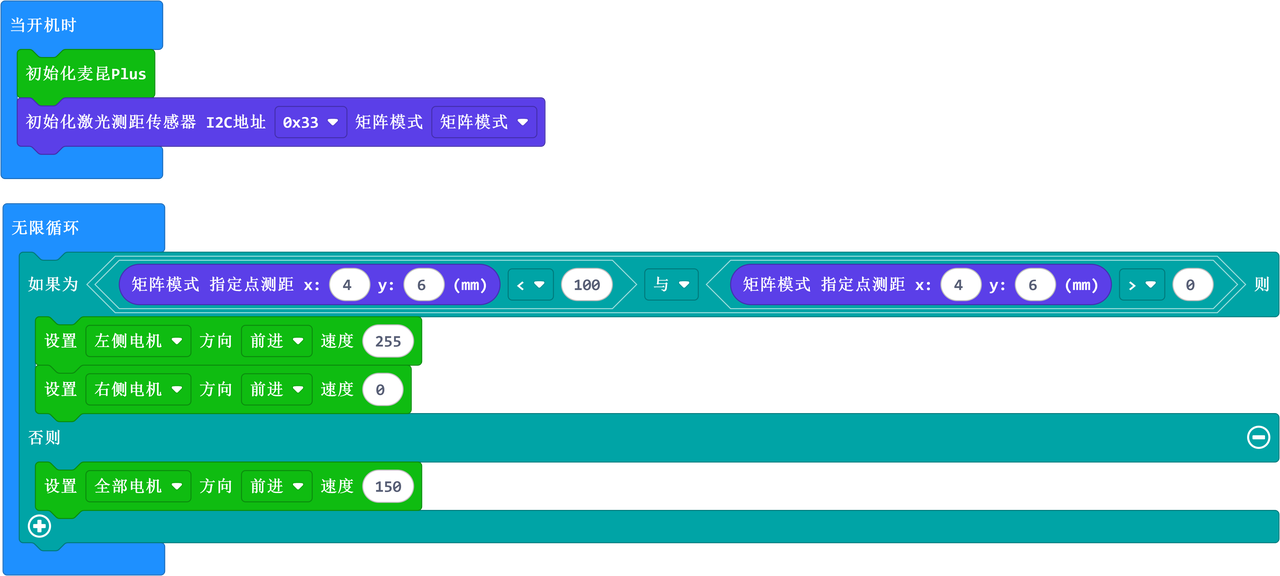
项目1-1束激光测距避障
功能描述
在矩阵模式下,选择其中一个激光点(x4,y6)测距并进行避障。当矩阵激光测距传感器检测到与前方障碍物的距离小于100mm(10cm)时,小车立即执行右转操作。
示例程序
程序链接:https://makecode.microbit.org/_9TLiTJLyMHjf
**示例效果 **
注意:程序上传成功后,矩阵激光测距传感器的启动需要大约3秒。在这段时间内,小车不会有任何动作,请耐心等待传感器完成初始化。
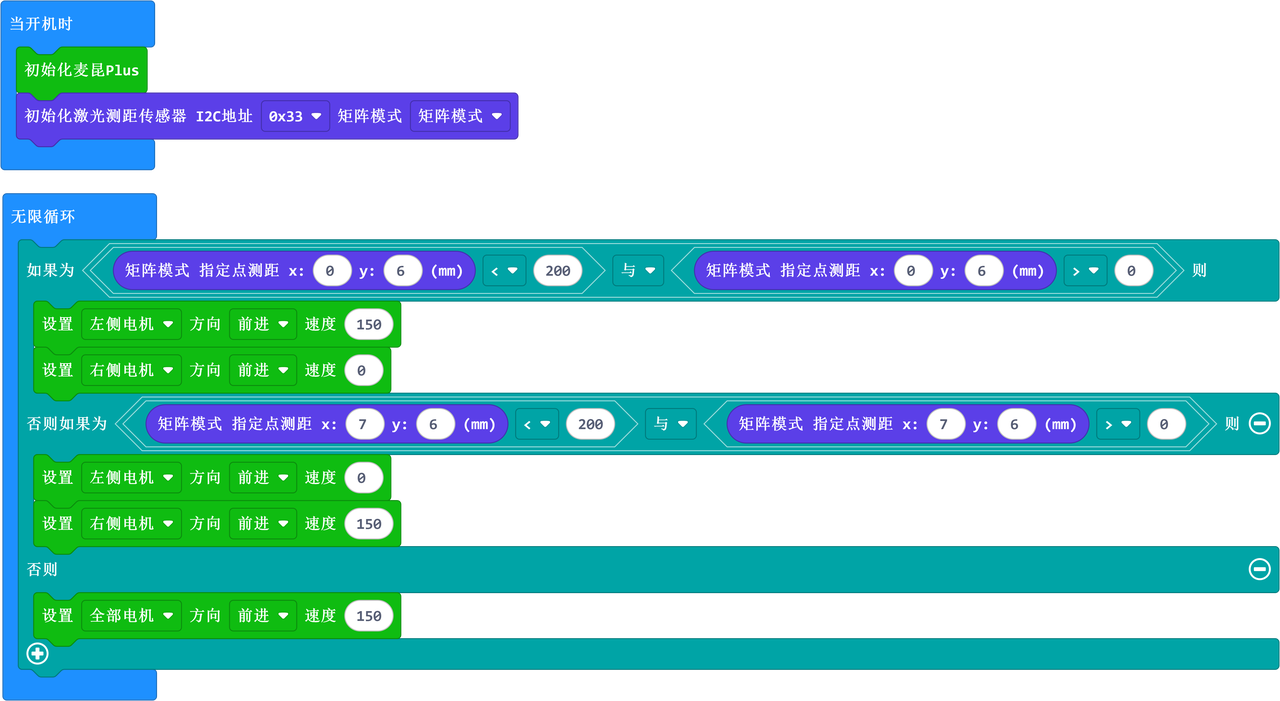
项目2-2束激光测距避障
功能说明
选择左侧激光点(x0,y6),右侧激光点(x7,y6),当矩阵激光测距传感器检测到左侧激光点有障碍物时,小车朝右行驶;当检测到右侧激光点有障碍物时,小车朝左行驶,从而实现让小车朝没有障碍物的方向行驶。
示例程序
程序链接:https://makecode.microbit.org/_A5cb2FTY51Dk
示例效果
项目3-3束激光测距避障
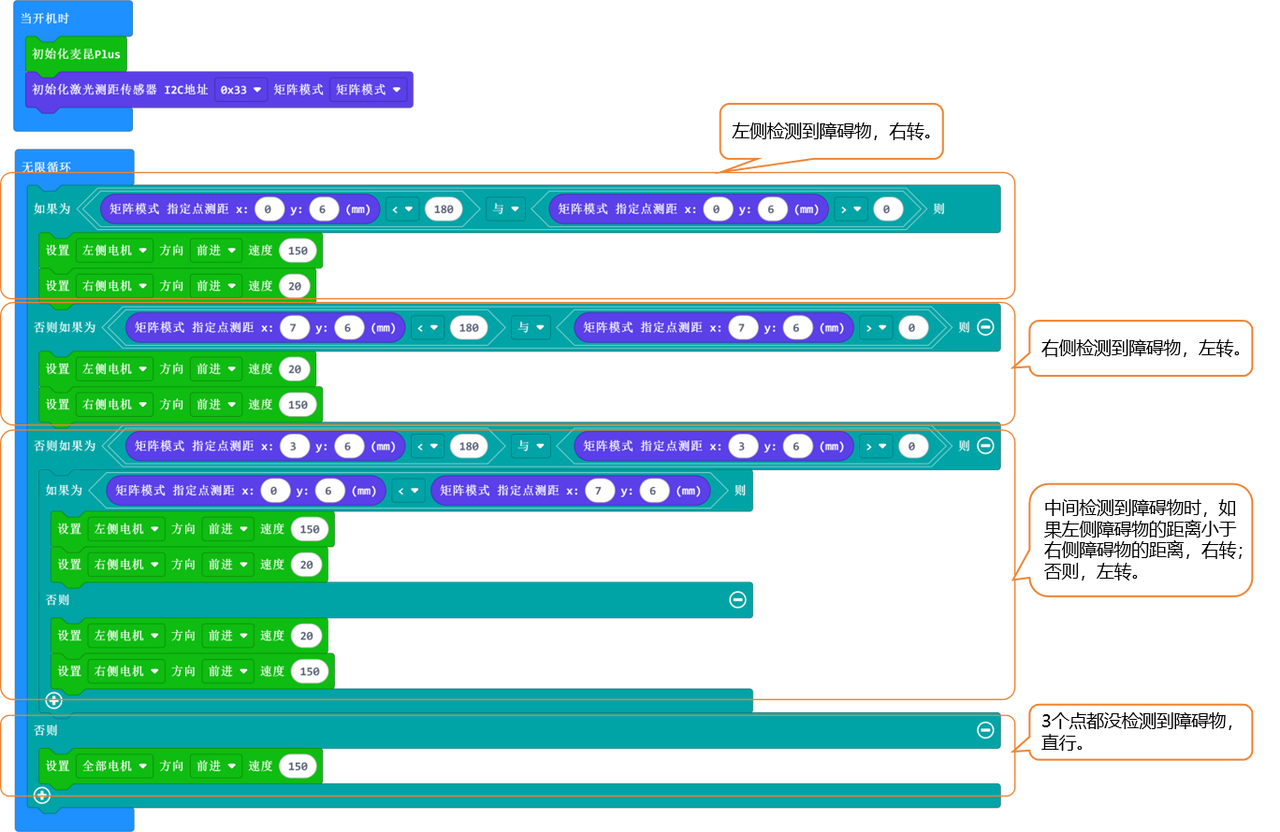
功能说明
选择左侧激光点(x0,y6),中间激光点(x3,y6),右侧激光点(x7,y6),三束激光同时检测左中右方向的障碍物并进行避障,让小车自动朝没有障碍物的方向行驶。
示例程序
程序链接:https://makecode.microbit.org/_3uEapP7cpdH7
示例效果
项目4-悬崖识别及避障
功能说明
选择中间激光点(x3,y3)作为悬崖识别避障的测量点,当矩阵激光测距传感器检测到悬崖时,右转;否则,直行。
示例示例
程序链接:https://makecode.microbit.org/_UYWJR192aajd

示例效果


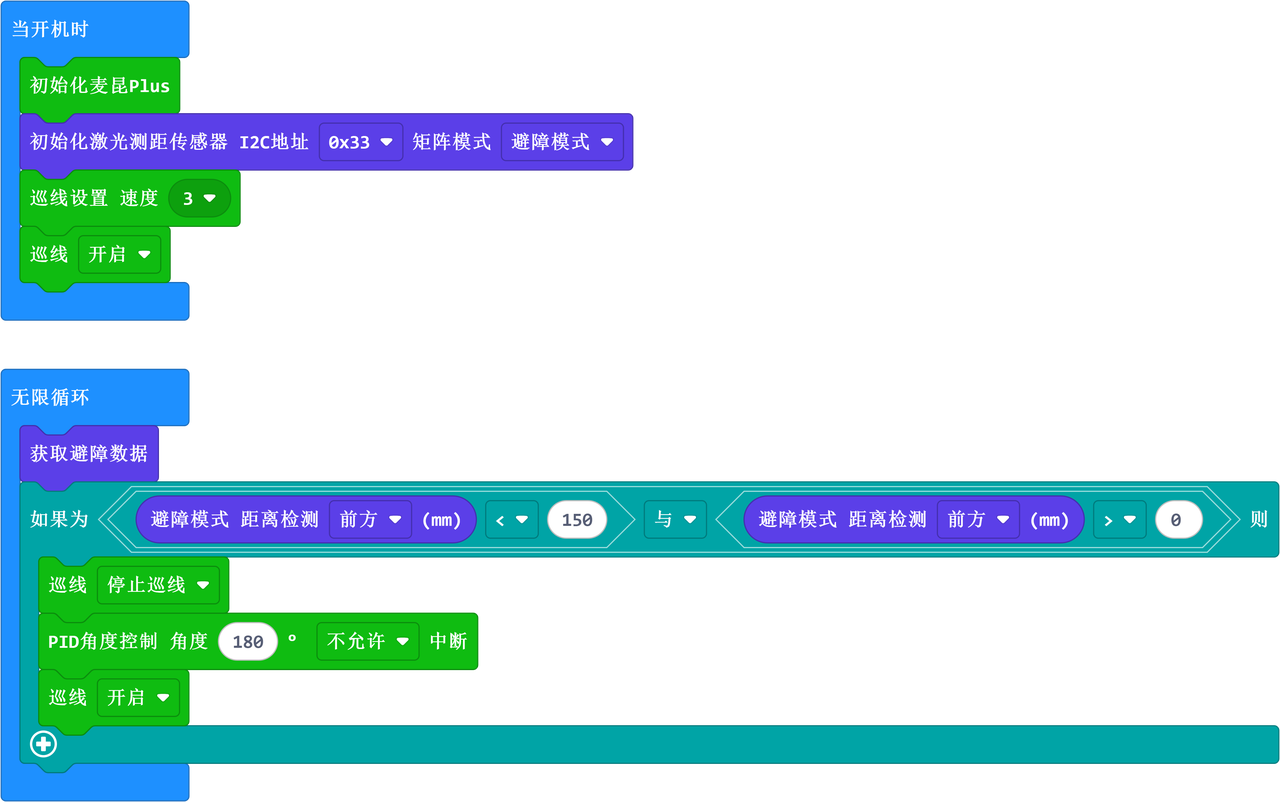
项目5-巡线避障机器人
功能说明
使用矩阵激光测距传感器的避障模式,小车在巡线过程中,检测到正前方有障碍物(检测到的距离小于150mm),小车转弯掉头继续巡线。
示例程序
程序链接:https://makecode.microbit.org/_W8qc37ePpUPu
示例效果
矩阵激光雷达使用经验分享
在上面的示例中,你已经基本掌握了矩阵激光测距传感器的基本使用方法。以下是一些调试和应用中的实用建议,可以帮助你更深入地发挥传感器的能力:
1.选择不同激光点位:传感器的每个激光点位对应不同的视角,选择适当的点位可以更精准的感知周围的环境。
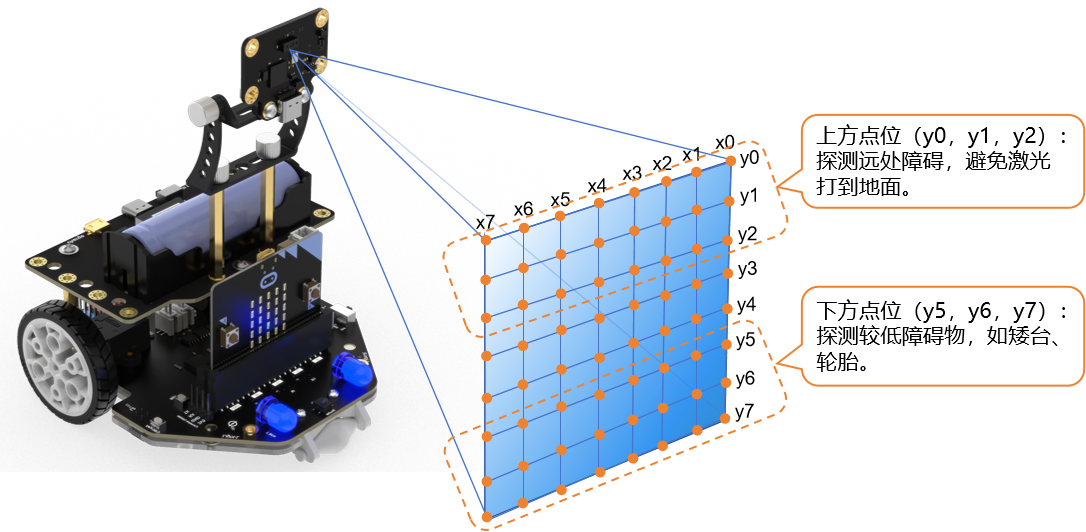
2.调整安装角度:轻微向下倾斜传感器可以提升对路面凹陷或台阶的检测能力。
3.多个激光点配合,实现更智能的避障,让小车选择“哪里有路走哪里”。
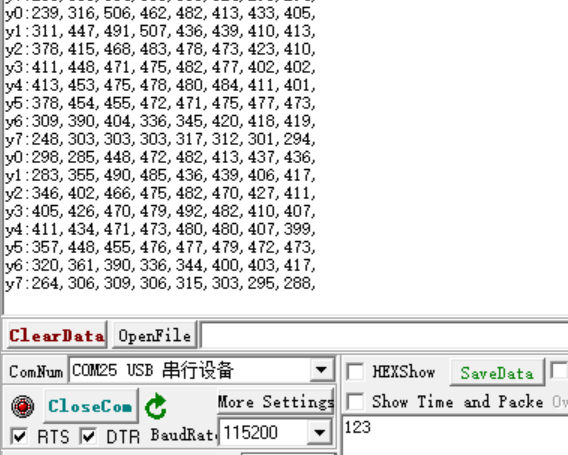
项目6:USB输出矩阵数据
激光测距传感器支持USB输出矩阵数据。根据设置的模式不同,USB接口将输出8*8矩阵数据。
工具准备:
- Windows10以上操作系统的电脑: *1
- USB TO TYPE-C数据线: *1
- 串口数据通讯软件,如SSCOM 。
使用方法:
- USB连接传感器,如图所示:
- 打开SSCOM,选择对应的COM口并打开,打开DTR,波特率设置为115200,此时,数据会主动推送到USB口,如图所示:
注:矩阵激光雷达的启动时间较长,约3秒。故开机3秒左右,麦昆plus V3可能不会动作,请耐心等待。
11.11 PID控制及车速检测
说明:
麦昆Plus V3集成了磁感应式编码器,能获取小车的实时转速。通过对转速的PID算法的闭环控制,能让小车按要求距离或角度行驶。例如小车前进80cm,小车原地转向100度。
同时,也能获取小车当前的实时速度,这就像一个小车速度表。单位为:厘米/分钟
PID控制前进距离误差:±2cm
PID控制角度误差:±5°
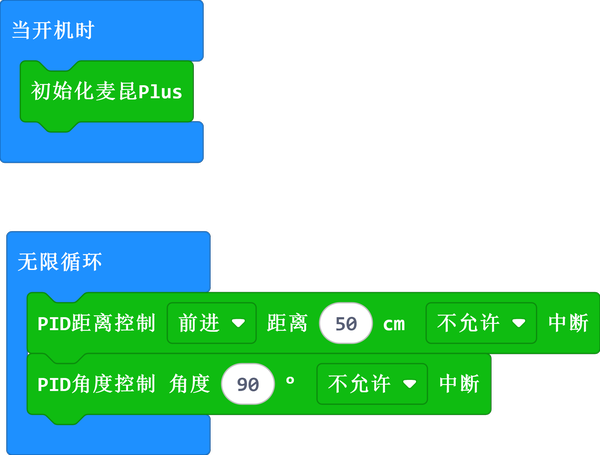
示例1:PID控制(不允许中断模式)
不允许被中断:在PID控制前进距离的过程中,未到达指定距离前,程序不往下执行,也不能中途终止。直到走完设定的距离后才执行下一条程序。这种方式能大幅度简化程序的设计。
说明:
- 小车前进50cm。
- 然后原地转向180度。
由于控制距离和角度存在误差,所以,最终回到起点时会存在一定的误差,并且,经过几次循环后,误差会逐渐变大。
程序链接:https://makecode.microbit.org/_5iCRJufoMhua
示例2:PID+激光测距停止(允许中断模式)
说明:
允许被中断:即便设置了PID控制的距离,中途也可以被打断停止执行。该方式使用灵活,可随时终止前进。但该方式在循环执行中,如果PID没有停止的情况下,再次发送PID控制命令时,程序执行将出错。所以,需要设置一个标志变量,用于检测当前情况是否处于PID控制的停止状态。
该程序演示了设置PID控制小车前进500米(相当于一直往前行驶),当检测到前方20厘米内有障碍物时,PID控制停止,小车停止。并且给x置1。当移开障碍物时,小车继续前进,并将x置0,用于下一次的PID控制判断。
程序链接:https://makecode.microbit.org/_7TF1Xoi7i6i9

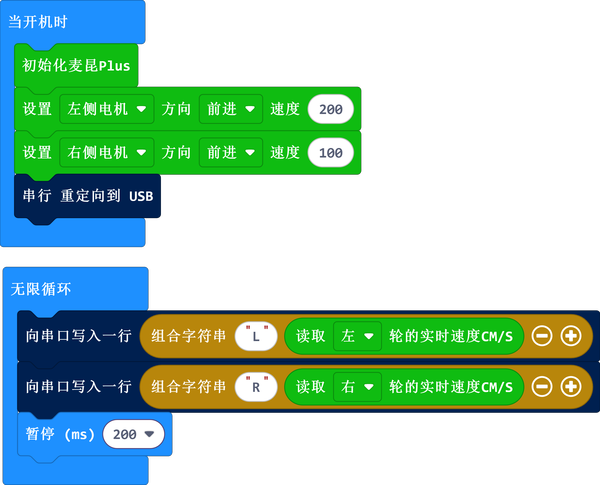
示例3:读取实时速度
说明:
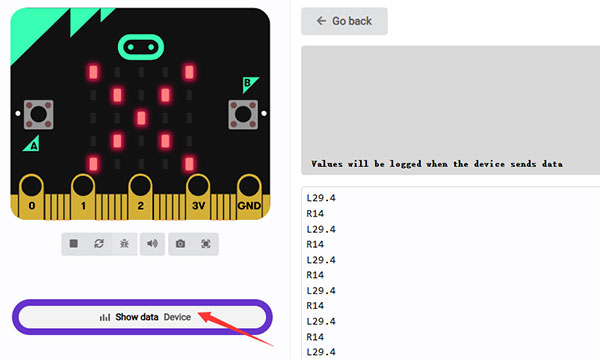
- 下方示例演示了实时读取小车两个轮子速度,并在串行串口中打印出来。
- 速度单位为:厘米/秒。
程序链接:https://makecode.microbit.org/_FKs8HR1c7AW5
示例中读取到的实时速度分别为:
- 左轮29.4厘米/秒
- 右轮14厘米/秒
12. 固件升级
12.1 麦昆Plus V3本体固件升级
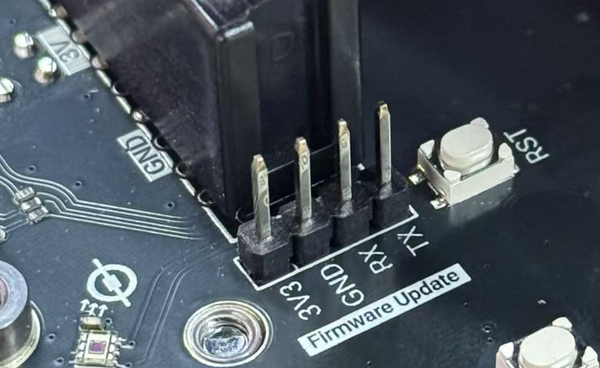
麦昆Plus V3支持固件升级功能。你需要准备一个USB转TTL转换器,连接到固件升级接口,然后对产品进行升级。麦昆Plus V3采用了在线升级的方式,所以,升级的电脑需要能正常连接网络。
固件升级接口位置如下图:
工具准备:
- USB转TTL转接器:*1
- 连接线:若干
- Windows10以上操作系统的电脑 *1 (确保用于升级的电脑能连接上网络)
- 升级软件:
固件升级方法:
- 将USB转TTL转换器连接到升级接口及电脑,如图所示:
//图片待补充
- 打开升级软件,选择对应的COM端口,然后打开COM口。如图所示:
//图片待补充
- 按住麦昆Plus V3上的RST键,同时点击查找设备,如图所示:
//图片待补充
-
查找完成后,会弹出该设备的SKU号,以及当前的固件版本号和服务器上的最新版本号。选择最新的固件版本号,然后点击更新设备。如图所示:
-
固件升级完成。
12.2 激光测距传感器固件升级
工具准备:
- Windows10以上操作系统的电脑: *1
- USB TO TYPE-C数据线: *1
固件升级方法:(过程照片待补充)
激光测距传感器采用了可移动磁盘的方式进行固件升级。升级方式如下:
- 按住传感器的BOOT按键插入USB线连接电脑。
- 电脑上会出现一个可移动磁盘。
- 将升级固件复制粘贴到该磁盘。
- 安全移除可移动磁盘。
- 固件升级完成。