产品简介
解决教学痛点,精心优化设计
在 STEM 大班教学中,老师们常常面临诸多问题。如质量差、上手复杂的产品会成为教学的阻碍。在几十人的课堂上,任何产品的小问题都可能引发连锁反应,导致整节课都在忙于解决学生们各种各样稀奇古怪的问题。同时,如何迅速激发学生的兴趣,营造良好的课堂氛围也是教学的关键要点。麦昆 V5 正是为了解决这些问题而进行了精心的优化设计。
巡线仅需一步
优化的巡线探头与算法:
- 巡线行驶作为 STEM 机器人教学中极具趣味性的重要项目,却常因教育小车巡线功能不佳而出现问题,如巡线失败、效果差等,致使课堂教学状况频发。麦昆 V5 对此进行了改进,将巡线传感器探头从 2 颗增加到 3 颗,并且创新性地将巡线算法内置在底层芯片内。
- 仅需 1个程序模块即可实现流畅巡线,这使得巡线功能变得异常简单。老师无需再担忧巡线问题导致的课堂 “翻车”,学生们也能迅速体验到有趣的巡线功能,从而快速调动学习兴趣和课堂氛围。
多功能并行优势:
- 由于巡线算法内置在底层芯片中,相当于为机器人增添了一个运算内核。这使得 micro:bit 可在巡线的同时应用更多功能而互不干扰,例如在巡线的同时实现避障、闪灯、读取传感器、显示和切换图像等等,极大地丰富了教学内容和学生的实践体验。
可靠的电机组件
精细化参数匹配与防护设计
麦昆 V5 采用了精细化参数匹配的金属电机,通过对 30 多种电机样品的反复测试验证,在性能、可靠性和速度上进行了精心适配,确保电机转动流畅不卡顿。同时,对电机进行了整体防护,齿轮箱不再裸露在外,大幅减少了发丝等杂物进入齿轮箱损坏电机的风险。
可拆卸式设计保障教学
在课堂上,学生们对机器人充满好奇,可能会不小心压坏、摔坏精密的电机组件。麦昆 V5 考虑到这一点,采用了可拆卸式电机设计。一旦电机损坏,可快速完成电机的更换,保障教学的顺利进行。
便捷的开箱即用体验
课堂教学中,复杂的安装过程往往令人头疼。尤其是学生数量众多时,安装错误会引发各种问题,导致小车无法正常使用。麦昆 V5 在出厂时就将电机、电池盒、车轮等安装完整,电池盒采用铜柱牢靠地固定在底板上。老师和学生无需进行安装,开箱即可直接使用,为教学节省了宝贵的时间和精力。
丰富的光线感知与灯光设计
精准的光线感知能力:
光线的感知对于机器人如同人的眼睛一样重要,是其必不可少的感知器件之一。能够分辨位置的光线感知能带来有趣的玩法,快速激发学生对机器人的兴趣。麦昆 V5 板载了 2 路光线强度传感器,位于小车前方的左右两侧,具备光源位置定位和光线强度检测能力,可实现寻光、追光、避光、自动车灯等趣味应用。
吸引人的灯光效果
五颜六色的灯光对小朋友有着极大的吸引力。麦昆 V5 采用了 2 个加大号的彩色 RGB 前车灯和 4 颗彩色 RGB 氛围灯,灯光与传感器相互配合,营造出独特的视觉效果。
隐藏功能
麦昆 V5 还具有一些隐藏功能,等待着大家去发现:
- 电池电量读取功能,可随时获取电池剩余电量。
- 固件升级功能。
等等。。。。。。
麦昆V4/V5功能差异表
| 名称 | 麦昆V4 | 麦昆V5 |
|---|---|---|
| 红外数据接收×1 | ✔ | ✔ |
| 超声波传感器×1 | ✔ | ✔ |
| 蜂鸣器×1 | ✔ | ✔ |
| 巡线传感器校准 | ✔ | ✔ |
| 金手指接口 | ✔ | ✔ |
| LED车灯 | ✔ | ✔升级为RGB车灯 |
| RGB车灯 | × | ✔ |
| 巡线传感器模拟量输出 | × | ✔ |
| 光照传感器×2 | × | ✔ |
| 内置巡线功能 | × | ✔ |
| 电机可拆卸 | × | ✔ |
| 电池盒铜柱螺丝固定 | × | ✔ |
| 电量读取 | × | ✔ |
| USB固件更新 | × | ✔ |
| 出厂状态整机装好,无需安装 | × | ✔ |
| 巡线传感器数量 | 2 | 3 |
| 扩展IO口 | 3 | 3 |
| I2C接口 | 2 | 2 |
| WS2812 RGB | 4 | 4 |
| 舵机接口 | 2 | 2 |
产品参数
供电参数
- 供电电源:3.5V-5V,3节AAA电池,1.5V干电池或1.2V镍氢电池
- 电池反接保护:支持
巡线传感器
- 巡线传感器数量:×3
- 巡线传感器校准按钮:×1
- 巡线传感器输出值:开关量/模拟量
- 芯片内置巡线功能:支持
- 芯片内置巡线速度:1档
RGB灯光
- WS2812 RGB数量: ×4
- WS2812 RGB灯显示颜色数量:1600万色
- RGB车灯数量:×2
- RGB车灯显示颜色:红、绿、黄、蓝、紫、青、白
光照传感器
- 光照传感器数量:×2
- 数据范围:0-1023
超声波传感器
- 超声波传感器型号:HC-SR04
- 超声波传感器数量:×1
- 供电电压:5V
- 数据接口:IO口
- 接口形式:2.54排母
- 测距范围:10cm-300cm(安装在麦昆上,距离地面较低,测距范围可能缩短为10cm-50cm)
- 测距精度:±3cm
电机
- 电机数量:×2
- 电机型号:N20金属电机
- 电机接口:2.54排针排母
- 电机供电:电池直接供电
- 电机拆卸方式:螺丝固定与拆卸
红外及蜂鸣器
- 红外接收传感器数量:×1
- 蜂鸣器及开关数量:×1
扩展接口及其它配置
- PCB螺纹接口: ×6
- 固件更新按钮: ×1 (与校准按钮共用)
- 扩展IO口: ×3
- I2C接口: ×2
- 舵机接口: ×2
- 金手指接口: ×6
安全注意事项
由于Maqueen 是STEM教育产品,产品采用的是裸板的方式。所以,在使用过程中需注意以下安全事项:
- 电池的使用需严格遵守电池使用方法及安全事项进行,否则可能会损坏产品以及引起发烫、燃烧等危险。
- 不得用尖锐物体,如螺丝刀等触碰产品,特别是电路板部分,电池部分。以免造成元器件损坏,或发生危险。
- 不得使用金属物体触碰产品的电路板,以免造成短路损坏产品以及引起发烫、燃烧等危险。
- 产品不防水,不能接触水、饮料等液体物质。如不小心将液体倾洒在了产品上,需及时关闭电源,取下电池。待水份完全干后,才能尝试通电。
- 产品收纳时,不能将多个产品堆叠放置在一起,以免造成元件损坏,甚至电源短路发生火灾危险及人员伤害。
准备工作
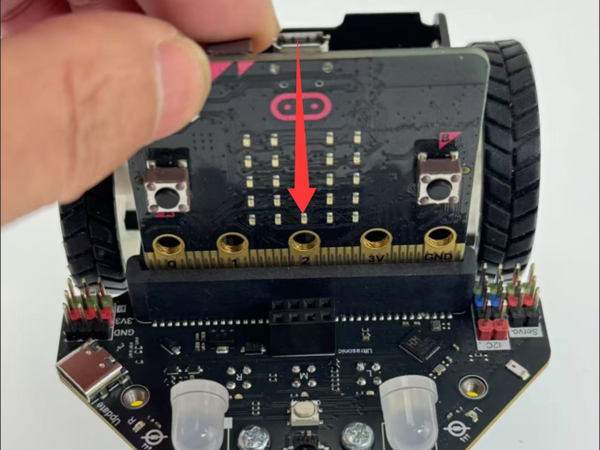
插上microbit主板
注意不要插反,如图所示。
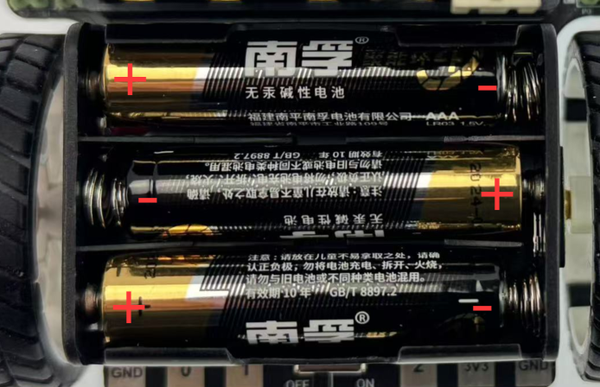
安装电池
注意电池正负极的安装方向,安装错误将无法正常工作,甚至损坏设备或发生危险。
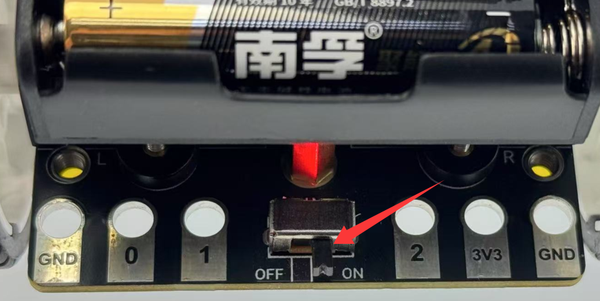
打开电源开关
将电源开关拨到“ON”侧,打开电源开关。此时,电源指示灯会亮起。
打开MakeCode平台及加载库
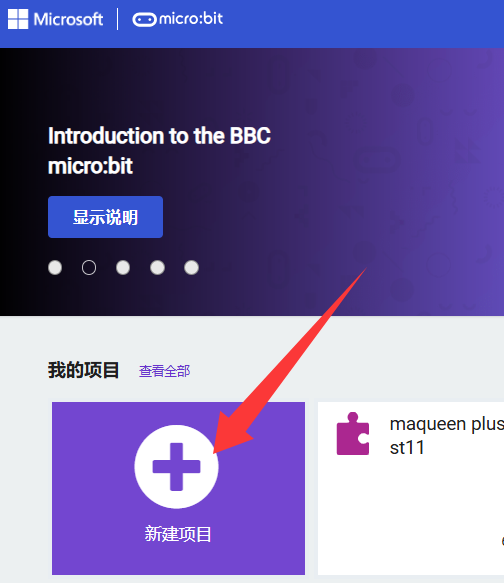
打开MakeCode图形化编程平台:https://makecode.microbit.org/
点击“New Project” 新建项目,如图:
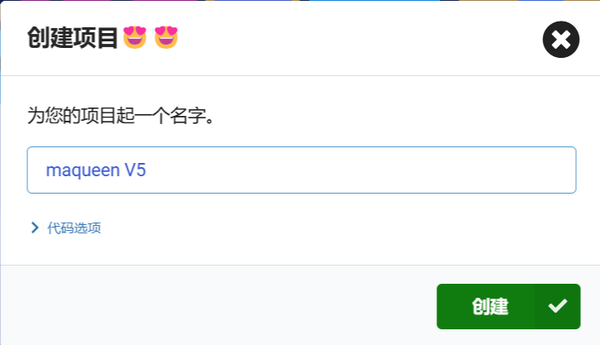
在弹出的对话框中为项目起一个名字,然后点击 “创建” 如图:
加载麦昆库:
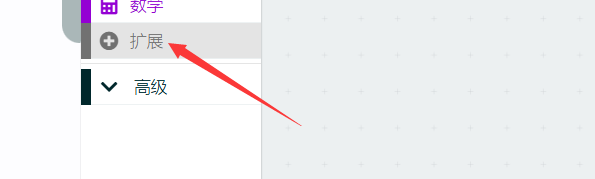
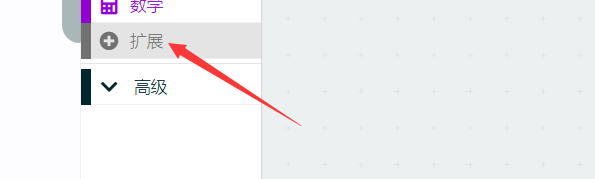
点击“扩展” ,如图:
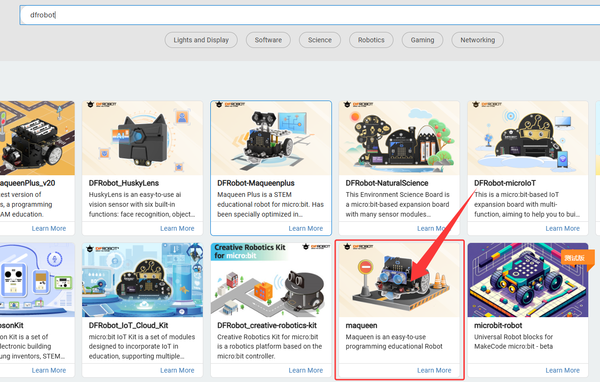
在搜索框中输入dfrobot,然后点击搜索按钮,选择 “Maqueen”,如下图所示:

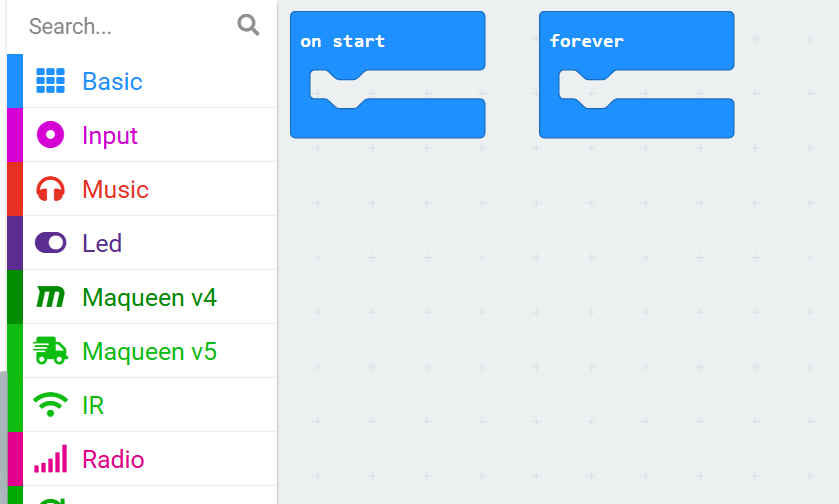
加载库完成。加载后的库如图所示:
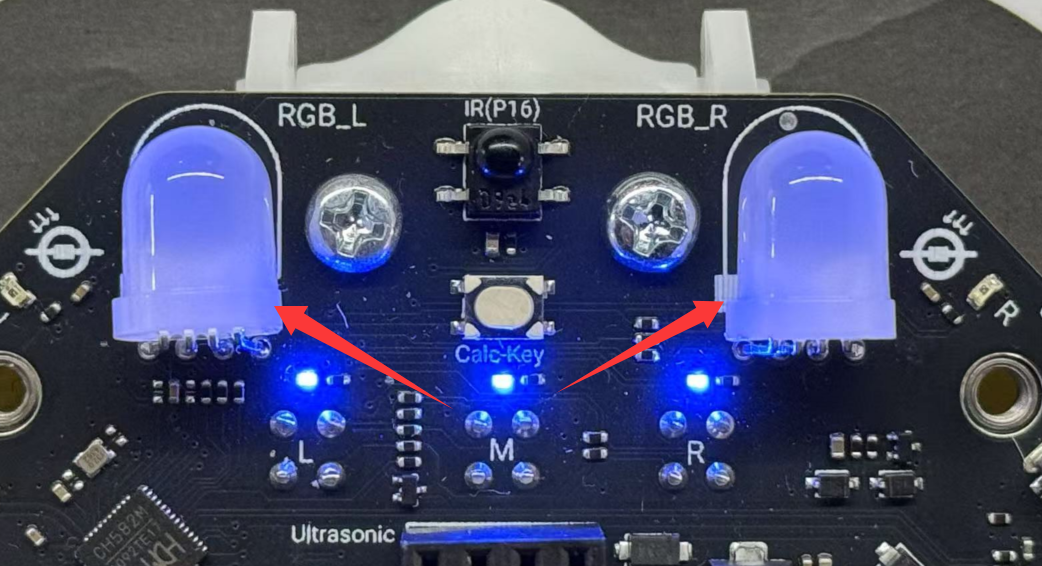
RGB车灯
功能说明
麦昆 V5具备两个大号的彩色前车灯。可显示7种颜色。并且还自带闪烁功能和渐变功能。
示例1:点亮车灯
该示例演示了让2个车灯按红色显示一秒,然后熄灭一秒。反复循环。
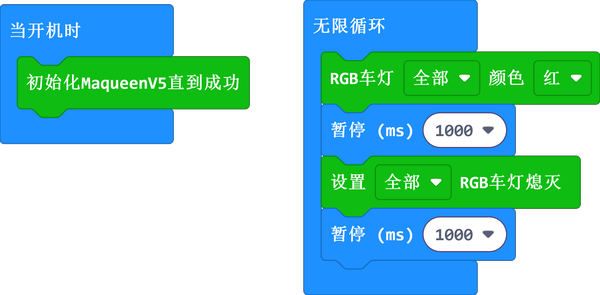
示例2:变换车灯颜色
该示例演示了间隔一秒钟切换2个车灯的颜色。

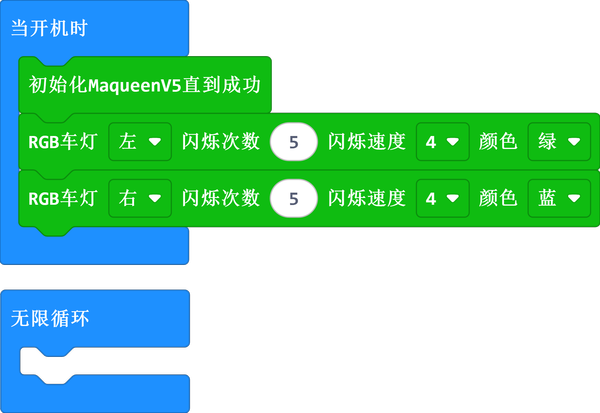
示例3:后台闪烁车灯
麦昆 V5支持车灯在后台闪烁,是小麦昆的特色功能,仅需发送一条指令,即可循环闪烁。可设置闪烁次数、闪烁频率和闪烁颜色。并且可实时打断,让车灯熄灭。
这一功能能够让车灯在循环闪烁的同时,不影响其它程序进程。
注意:该功能主要在“当开机时”中使用。在“无限循环”中使用,可能会因为时序的原因,效果不佳。
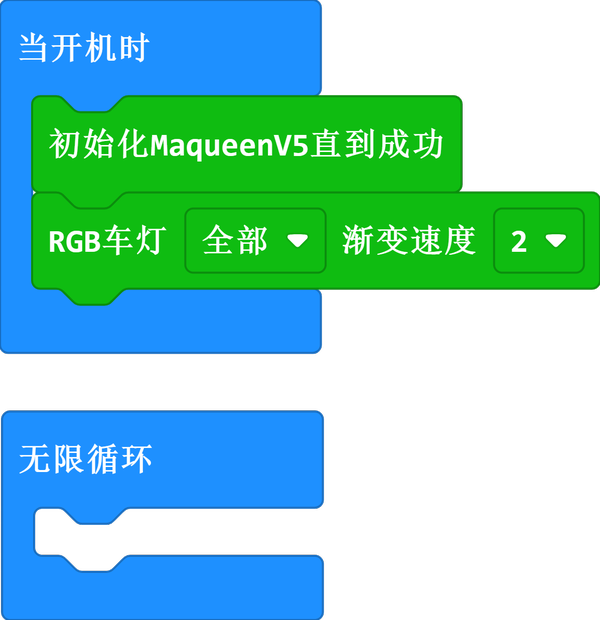
示例4:后台渐变车灯
麦昆 V5支持车灯在后台渐变显示彩色灯光,是小麦昆的特色功能,仅需发送一条指令,车灯即可渐变显示不同的颜色。
这一功能能够让车灯在点亮变换颜色的同时,不影响其它程序进程。
注意:该功能主要在“刚开机时t”中使用。在“无限循环”中使用,可能会因为时序的原因,效果不佳。
WS2812 RGB氛围灯
功能说明
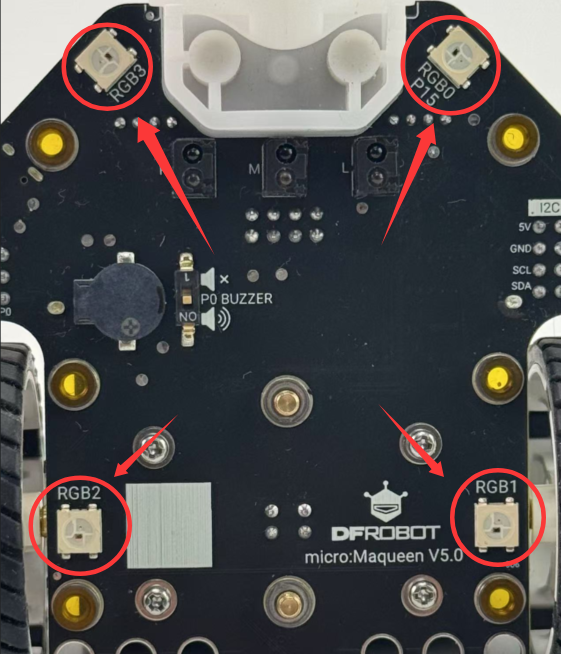
麦昆 V5在底部板载了4颗WS2812 RGB氛围灯。连接在micro:bit的P15接口。这4颗氛围灯支持全彩显示。
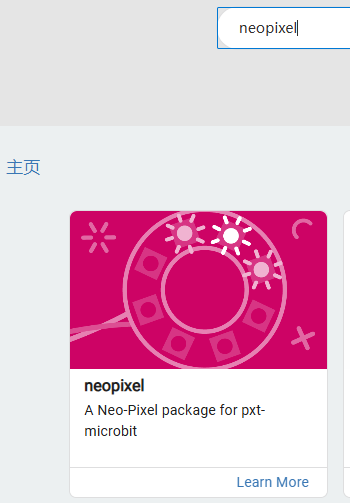
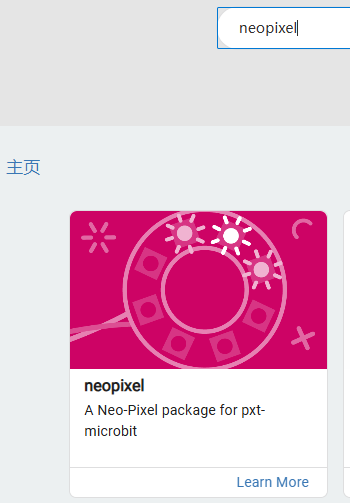
要使用氛围灯,首先需要在makecode中加载“neopixel”库,方法如图所示:
点击扩展按钮:
搜索“neopixel”,然后选择“neopixel”,如图:
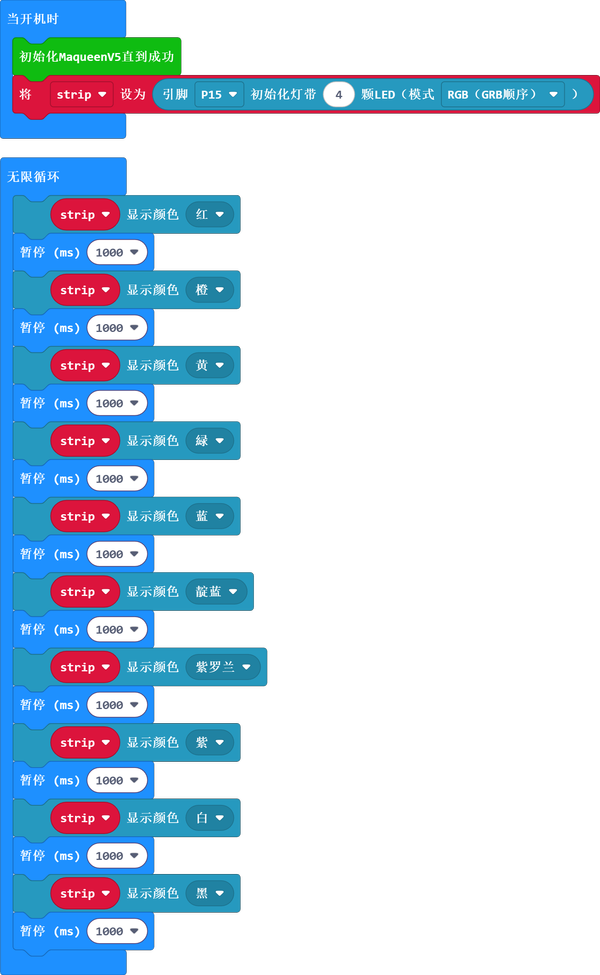
示例1:点亮氛围灯
该示例显示了让氛围灯9种颜色切换显示。
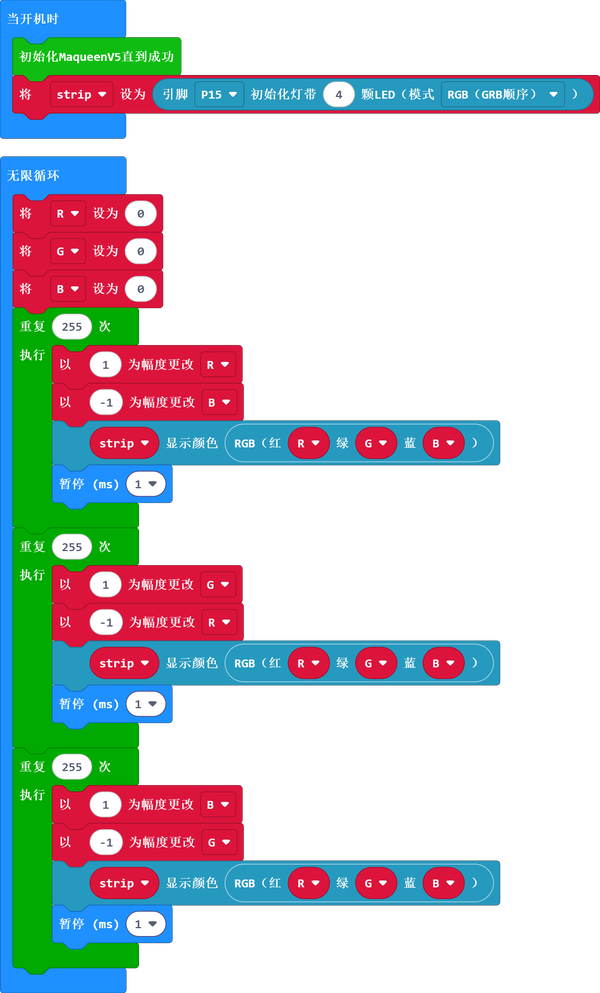
示例2:呼吸灯颜色融合
该示例演示了采用设定RGB颜色值的方式实现氛围灯呼吸状态的渐变融合效果。
程序链接:https://makecode.microbit.org/_Ao1L5tUXaEkj
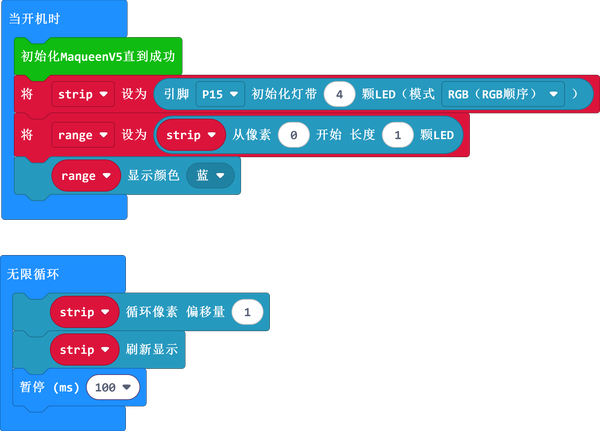
示例3:旋转流水灯
该示例演示了氛围灯呈现流水灯逐个点亮的效果。
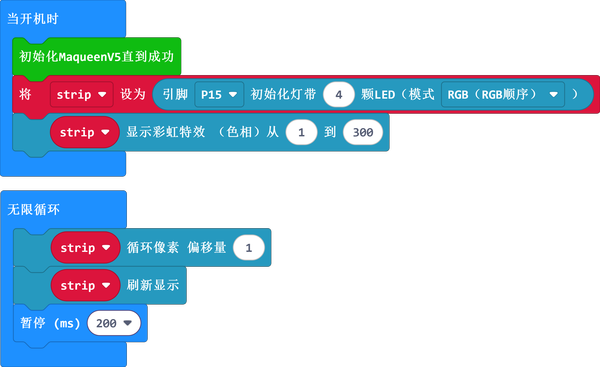
示例4:旋转彩虹灯
该示例演示了让氛围灯显示出渐变的彩虹色,并且呈现出动态的切换效果。
其中,彩虹色的色相可从1-360之间的范围可调,会呈现出不同的颜色效果。
蜂鸣器
功能说明
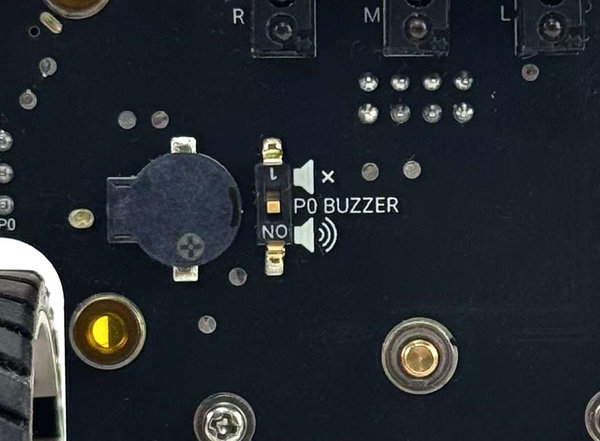
麦昆 V5集成了蜂鸣器以及开关,它们位于小车的底部。通过驱动蜂鸣器,可让小车发出报警声音或者各种音乐。
Microbit V2主板集成了蜂鸣器,microbit V1主板并未集成蜂鸣器。如果你使用的是V1的microbit,那么,你可以使用小车底板的蜂鸣器,如果你使用的是V2,那么可以自由选择是使用microbit集成的蜂鸣器还是小车的蜂鸣器。
麦昆 V5的蜂鸣器连接在microbit的P0口,如果要使用P0口,需将蜂鸣器开关位于关闭状态。
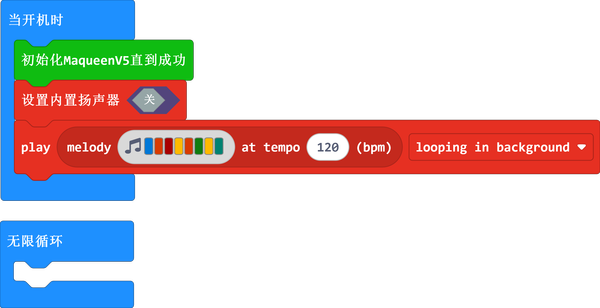
示例1:播放音乐
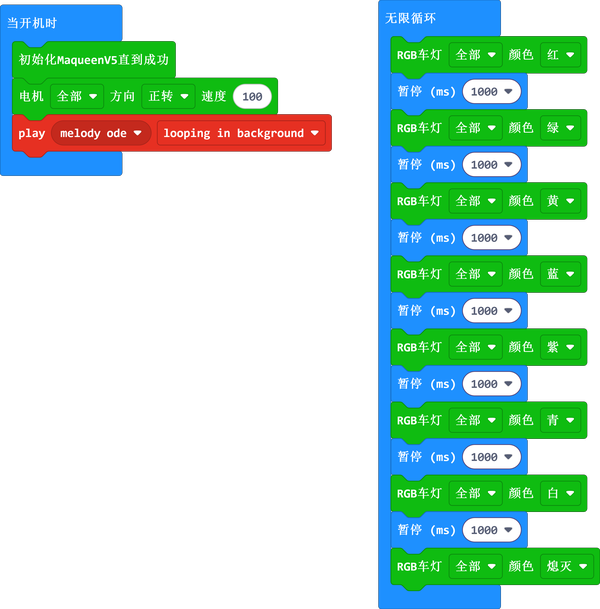
启动麦昆 V5
示例1:启动麦昆 V5
程序说明:
- 麦昆以100的速度前进。并且,持续播放音乐,车灯按一秒的频率更换颜色,车灯是配置的RGB灯,可显示7种颜色。
- 前进的速度范围为0-255,并非0-100,这也是PWM脉宽的范围。
- 速度在30以内,小车可能不会动,请将速度设置为30以上。原因是电机采用PWM驱动的方式,速度较低的情况下,驱动力会不足,所以速度在30以下时,驱动力太弱,导致小车几乎不动。
程序链接:
示例2:摇摆车
首先加载灯带库:方法如图所示。如果你已加载了灯带库,忽略该步骤。
点击扩展按钮:
搜索“neopixel”,然后选择“neopixel”,如图:
程序说明:
- 在该示例中,将用到电机驱动、车灯、底部RGB灯 。
- 底部RGB灯会以彩虹色点亮。麦昆 V5的底部RGB灯设置在P15引脚。1-360为彩虹色的显示范围,可尝试调节数值观察颜色的变化。
- 小车会一会儿右转,一会儿左转。左右侧的车灯也会随着切换不同的颜色。
程序截图:

快速开启巡线
功能说明
快速巡线功能是麦昆 V5的特色功能。它将巡线功能做到了底层芯片上,学生仅用一个black即可使用巡线功能,大幅度降低了学生的上手门槛。
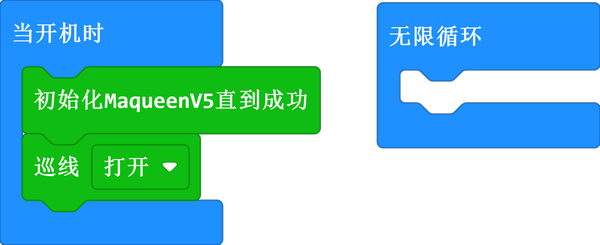
示例1:快速巡线
程序说明:
- 快速开启巡线功能。
- 下载程序后,将小车放到附带的地图上后,小车会自动跟着黑线行驶,如图:
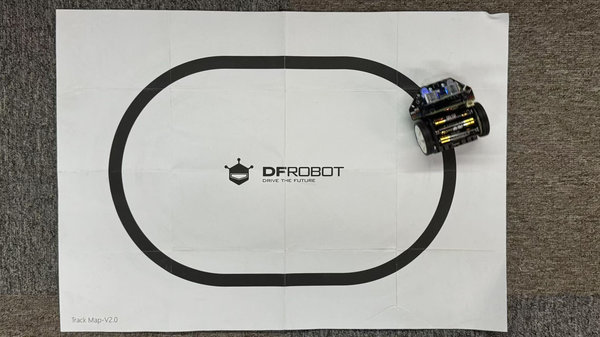
程序截图:
超声波避障
功能说明
在麦昆V5上,可支持安装超声波传感器,通过超声波对障碍物距离的检测,可实现小车自动避障的功能。
示例1:超声波避障
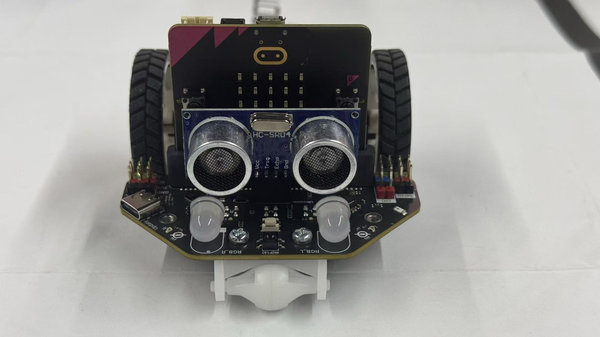
将超声波传感器插入到小车前方的超声波接口,前后两排接口均可使用,功能无差异,如图所示:
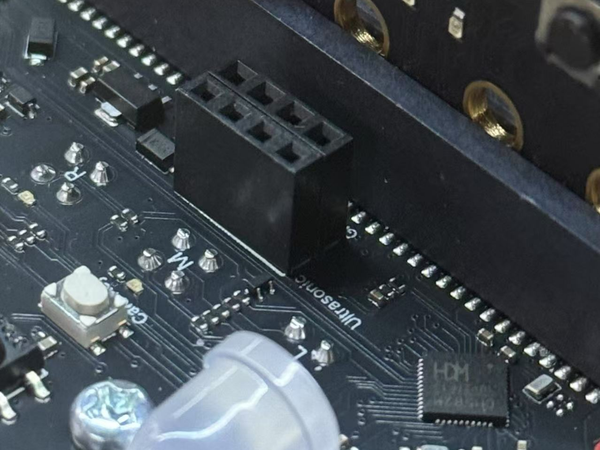
插好超声波的情况如图所示:
下载程序后,小车将自动检测前方是否有障碍物,有的话,会自动转向避开障碍物。
程序截图:

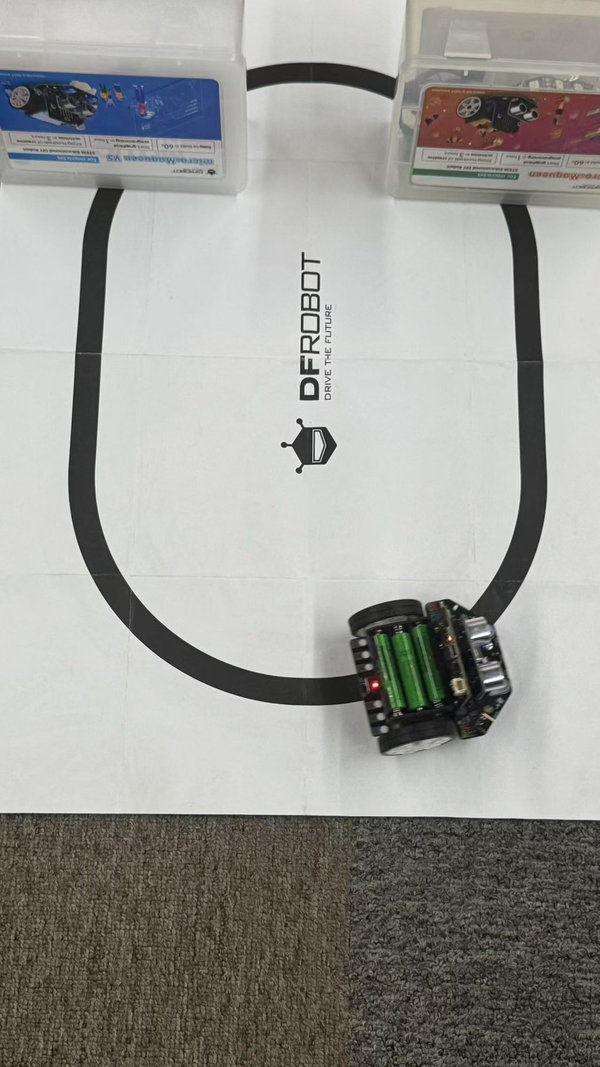
示例2:流水线机器人
在地图上摆上障碍物,如下图所示。
下载完程序后,将小车放到黑线上,小车将沿着黑线行驶,当遇到前方障碍物时,小车掉头,然后继续巡线。一直反复如此。
如果电池的电量不同,当转弯的角度和速度不合适的时候,可调整电机的速度以及暂停的时间来改善效果。
程序截图:

常规巡线程序
麦昆 V5板载了3颗巡线传感器,当检测到黑线时,输出状态的值为1,未检测到黑线时,输出状态为0。利用传感器对黑线敏感的特性,用于巡线行驶。
示例1:巡线机器人
程序说明:
自己编程读取巡线传感器的状态,然后实现巡线的逻辑。
程序链接:
https://makecode.microbit.org/_7WzMXpWXv7th

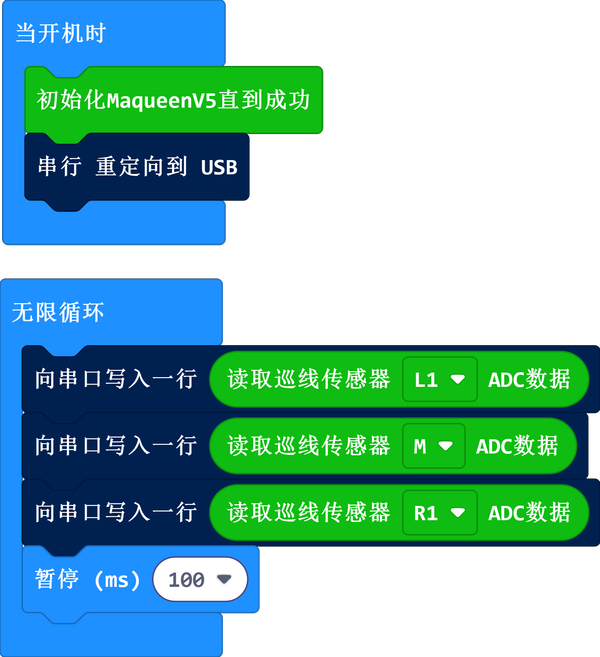
示例2:读取巡线传感器灰度值
程序说明:
模拟量值的作用可用于读取地图上不同的灰度值,能通过ADC值的方式来判断地图材质是否适合用于巡线。
该程序演示了将小车分别放在白色底上和黑色底上,查看两者之间灰度值的差异。
通过读取巡线传感器模拟量的值,并在电脑上显示出来。
程序截图:
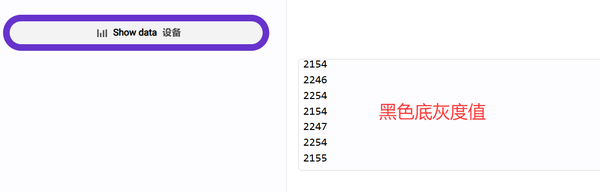
数据结果:
从数据中可以看出,在黑色底上,灰度值为2250左右,在白底上的灰度值为3000左右。数值相差了约700多。通过数值的差异,即可判断小车当前位于白底还是黑底,从而实现巡线的功能。
你也可以尝试在不同的底面上读取灰度值,看它们之间有什么样的灰度特性和差异。同时,也能通过ADC值的方式来判断地图材质是否适合用于巡线。

光线传感器-避光和追光机器人
功能说明
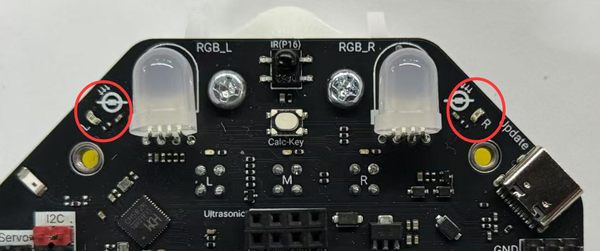
麦昆 V5在前方的左右侧各内置了一个光线传感器,该传感器能检测光线的强度。通过两侧光线的强度不同,可以让小车避开光线或者跟着光线的方向行驶。
光线传感器位置如图所示:
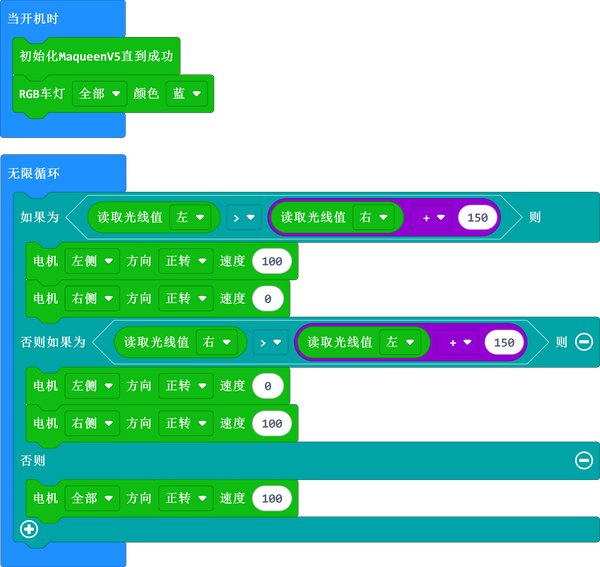
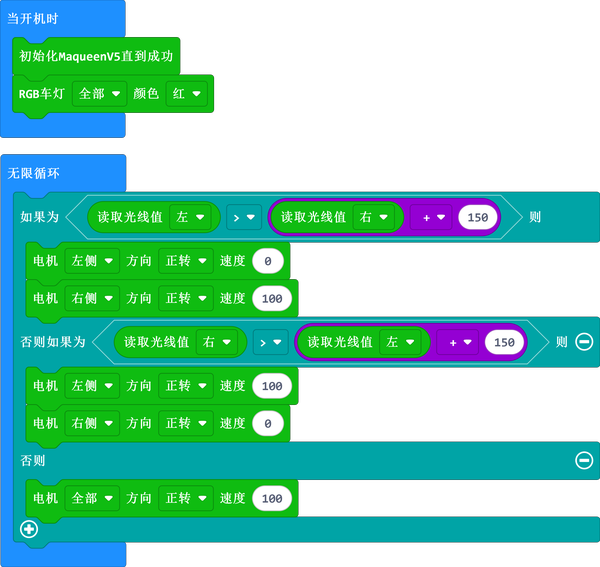
示例1:避光机器人
程序说明:
- 该示例演示了小车在行驶的过程中,如果某一侧出现了强光的话,就转弯避开灯光行驶。
- 在实际的测试中,可使用手机的手电筒功能照射光线传感器验证程序效果。
程序链接:
https://makecode.microbit.org/_4FtRXhemt0Af
示例2:追光机器人
程序说明:
- 该示例演示了小车在行驶的过程中,如果某一侧出现了强光的话,就跟着光线强的方向行驶。
- 在实际的测试中,可使用手机的手电筒功能照射光线传感器验证程序效果。
程序截图:
红外线遥控
功能说明
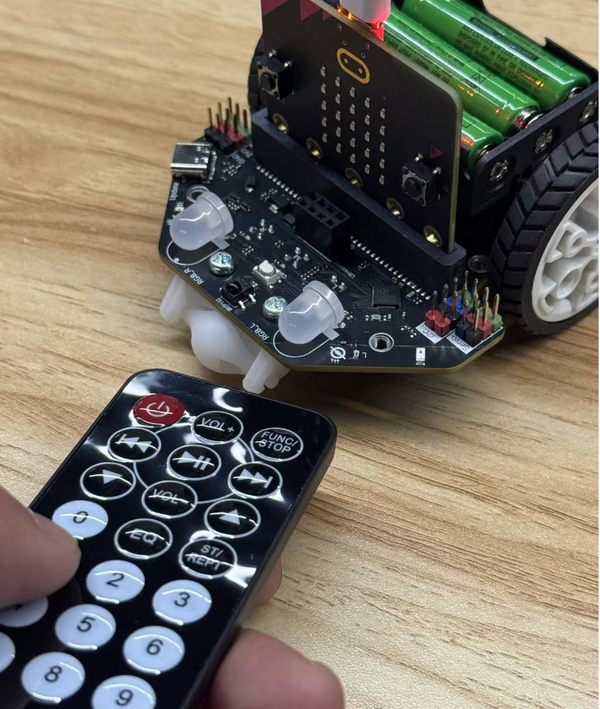
麦昆 V5内置了红外接收传感器,位于小车前方正中,可接收来自于红外遥控器的发射信号。通过识别红外遥控器不同按键的值,可让小车执行不同的动作,用于遥控机器人等功能。
麦昆 V5默认不配红外遥控器,如需使用该功能,请联系销售人员单独购买。
每批次的红外遥控器的布局和键值可能不同。
下表是红外遥控器的按键及对应键值,供参考:

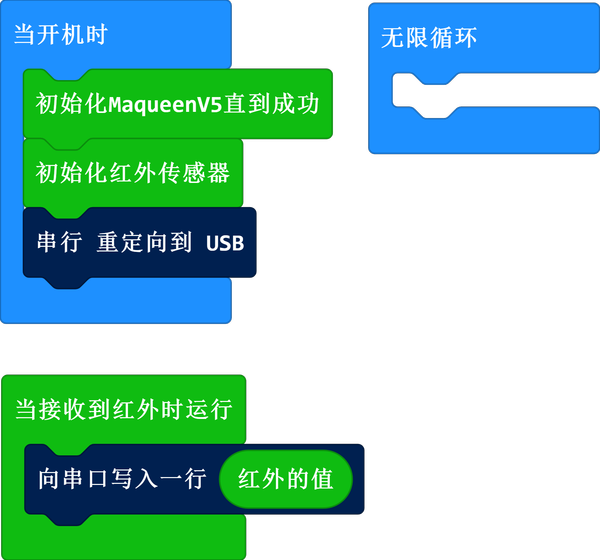
示例1:读取红外遥控器的值
程序说明:
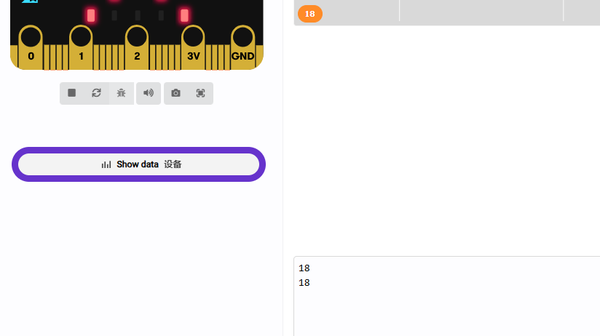
该示例演示了在串口监视器上显示接收到的红外遥控器的键值。键值以10进制的方式显示。
程序截图:
示例效果如下图:
示例2:红外遥控小车
程序说明:
- 该程序演示了使用红外线遥控器控制小车前进、后退、左转、右转、停止。
- 按遥控器的“2”键盘,小车前进,“8”键后退,“4”键左转,“6”键右转,“5”键停止。
程序链接:https://makecode.microbit.org/_cfkH1b0xgfkE
程序截图:

巡线校准方法
巡线传感器在出厂前已经完成过校准,通常情况下你无需校准。当你使用不同材质的地图,如果发现巡线传感器不能正确识别黑色线条时,可尝试进行巡线校准。校准前需取掉microbit主板和超声波传感器。
将麦昆放在黑色校准区域。(要确保3个探头都在黑色区域)

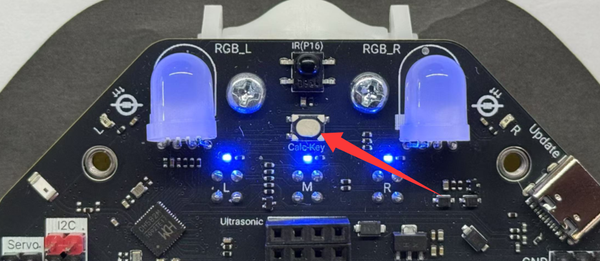
长按 “Calc-Key” 按键约2秒,巡线指示灯闪烁2次,然后松开按钮,校准完成。
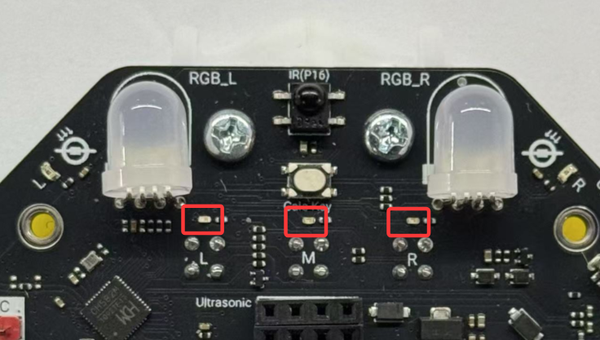
7.3 检验校准结果1:将巡线传感器放到白色底上,巡线指示灯灭
7.4 检验校准结果2:放到黑底上,巡线指示灯亮,校准正确
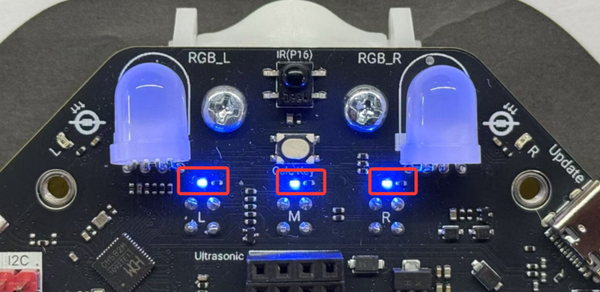
至此,校准完成。
注:巡线传感器采用了灰度检测的方式进行黑色线条的识别,所以,不是所有的黑色线条都能别有效识别,即使校准也无法正确识别。例如:打印机打印的地图可能无法识别。
电机更换方法
麦昆 V5采用了可更换电机的设计,如果因为高强度的使用,或者摔坏了电机,可采用如下方式进行电机的更换。
拆除电机
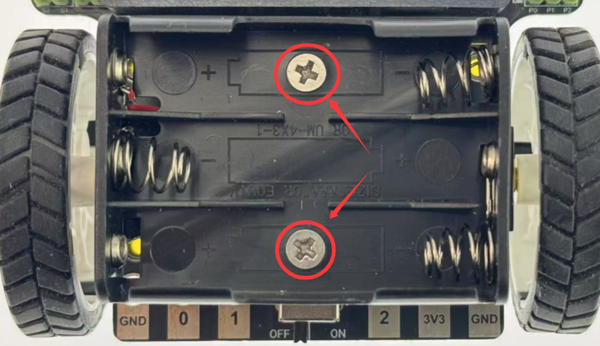
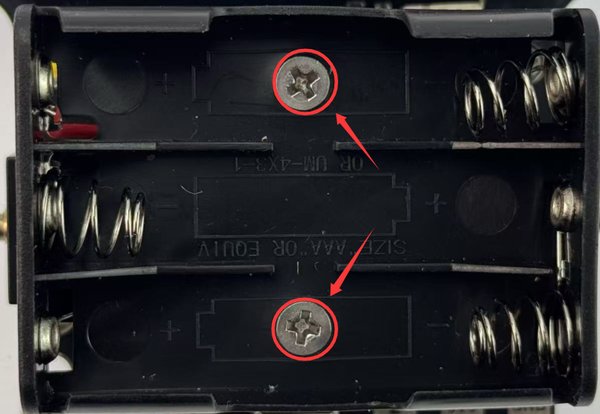
拆掉电池盒上的的两颗螺丝
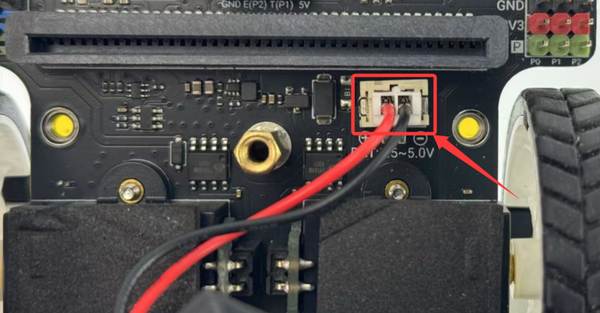
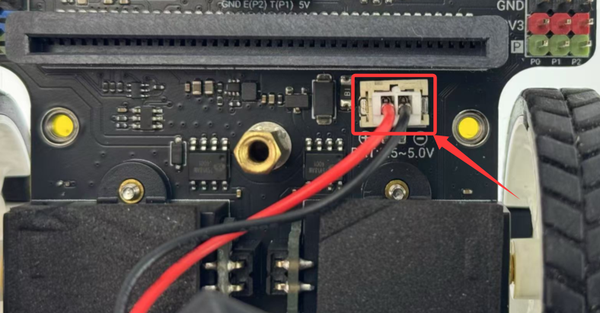
拔掉电池盒的电源连接线
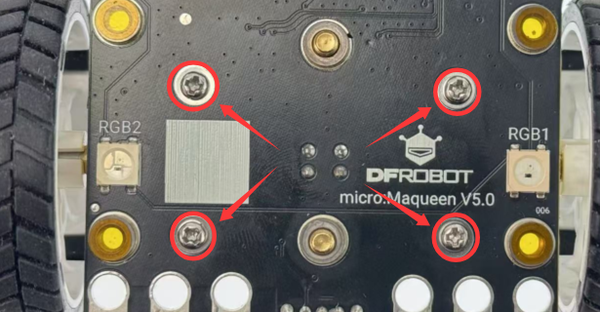
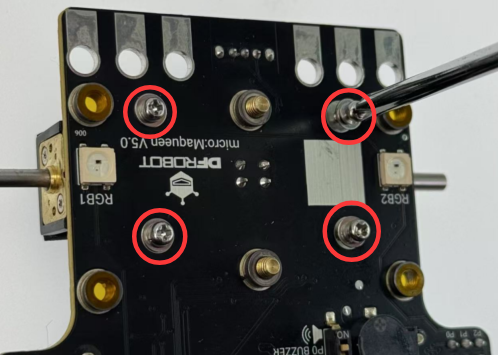
拆掉4颗电机固定螺丝
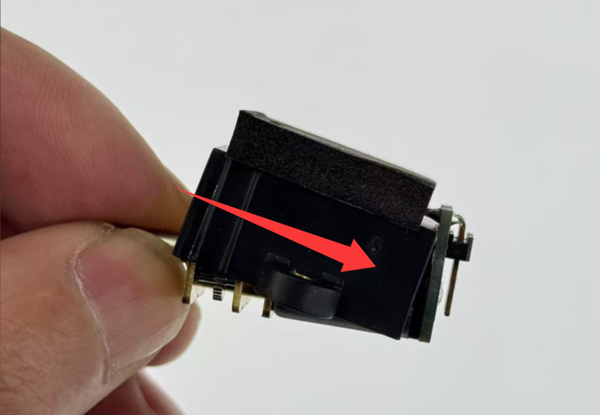
往上取出电机和卡扣
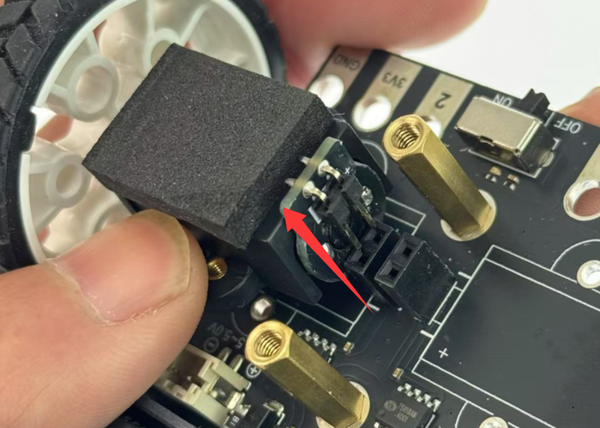
倾斜往上取出电机卡扣
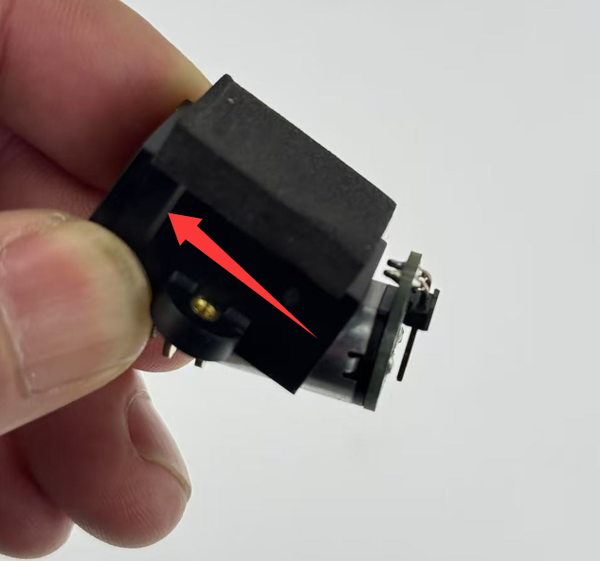
至此,电机拆卸完成。
安装电机
倾斜放入电机卡扣,避开PCB焊点
轻轻往下压,完成卡扣的安装
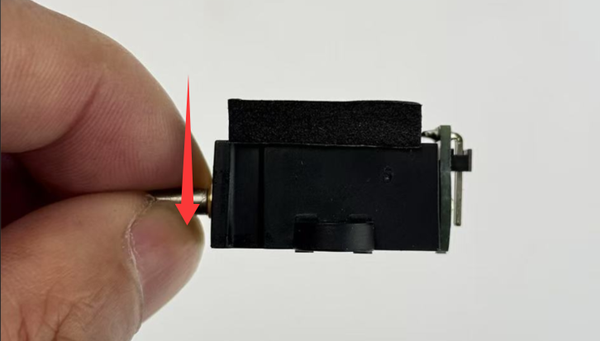
将安装好卡扣的电机往下插入电机接口
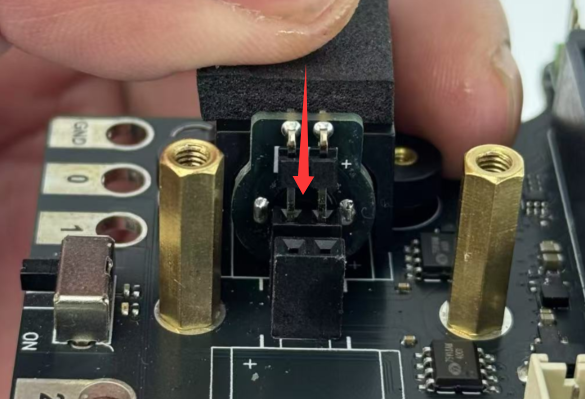
拧上PCB背面的4颗固定螺丝
插上电池盒的连接线
固定上电池盒的2颗螺丝
注意:电池盒的出现位置需要放置在左侧,如上一个步骤中的图。
装上轮子
注意,轮子的缺口需要和电机轴的缺口位置对齐,否则可能无法正确安装,或可能损坏轮子或电机。

至此,电机安装完成。
资料下载
CE证书:
MBT0046_maqueen-lite-v5_ce_1.0.pdf
RoHS证书:
MBT0046_maqueen-lite-v5_rohs_1.0.pdf
EN71测试报告:
MBT0046_maqueen-lite-v5_en71_1.0.pdf
FCC证书: