简介
DF推出全新的Raspberry Pi多功能电机驱动扩展板是一款全功能的机器人电机扩展板,适用于Raspberry Pi Zero/Zero W/A+/B+/2B/3B/3B+/4B。
能够同时支持多路电机、步进电机、舵机、空出摄像头和DIP显示屏排线接口,并且可以板层叠使用扩展出更多的控制接口,特别适合玩家DIY机器人,智能小车,机械手臂,智能云台等各种应用。控制接口简单采用I2C接口,兼容3.3V/5V电平。提供简单驱动例程,用户可以根据例程,修改,添加自己需要的功能,同时还具有UART接口,可以方便实现和外部设备间的通信。内置DC-DC稳压电路,为Raspberry Pi供电电流可达3A。
产品参数
- 供电电压:6 ~ 25V
- 电源接口:DC2.1接口或3.5mm接线柱
- PWM舵机接口接×8
- 直流电机接口×4
- 编码电机驱动接口×4 6 ~ 25V
- 驱动板IIC地址为0x60
特点
- 支持同时驱动8路舵机。3Pin(黑红蓝GVS)标准接口接线,方便连接舵机,舵机电源可切换到外部独立供电
- 12位分辨率,可调PWM频率高达1.6KHz,可配置的推挽或开漏输出
- 支持4路6~24V直流电机,PH2.0接口或者螺丝接口端子
- 适用于Raspberry Pi Zero/Zero W/A+/B+/2B/3B/3B+/4B
- 预留摄像头和DIP显示屏排线接口
- 扩展板预留2个IIC扩展接口,1个串口接口
- 板载无源蜂鸣器,板载红外接收头
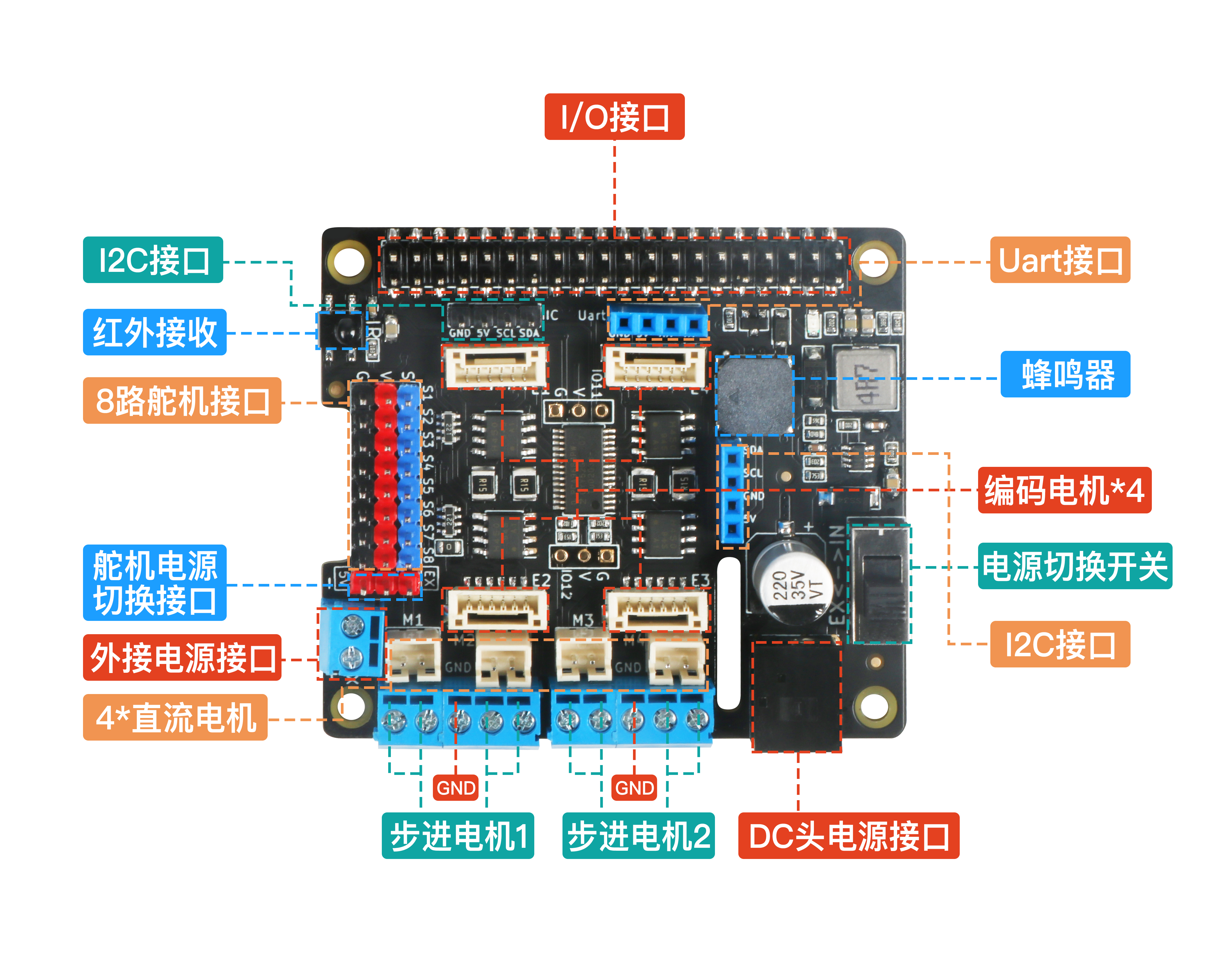
引脚/接口说明
使用教程
安装I2C库并使能
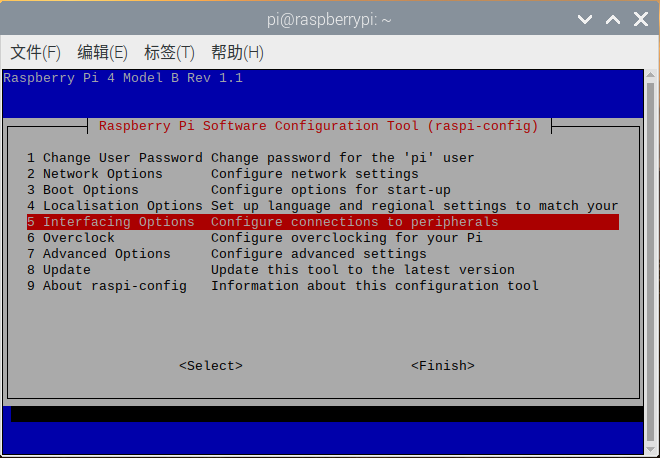
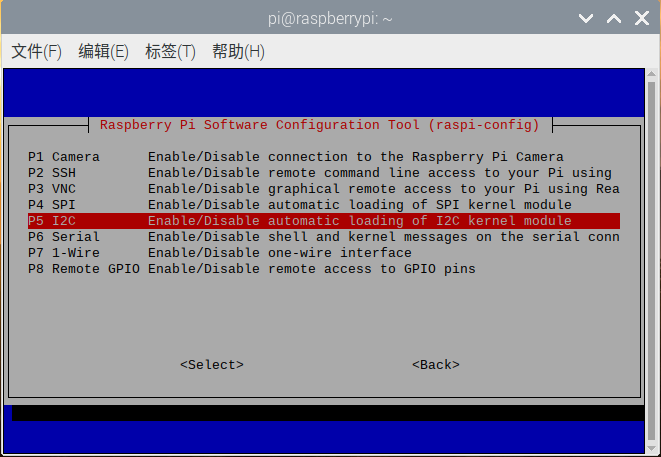
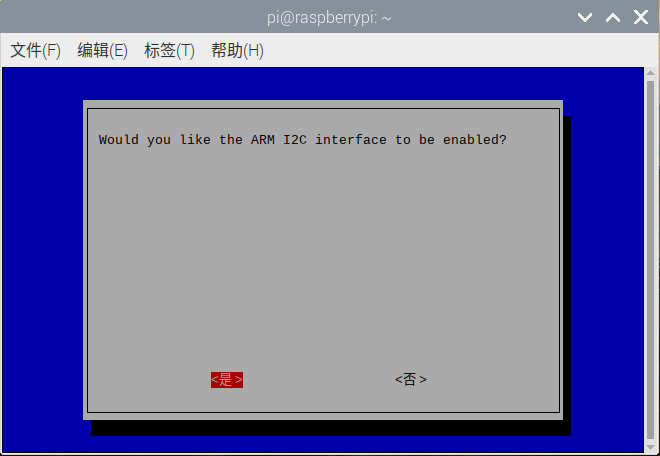
在使用驱动板之前,必须要先安装I2C库并使能。打开树莓派终端输入"sudo raspi-config"命令,然后按照下图顺序依次操作即可。

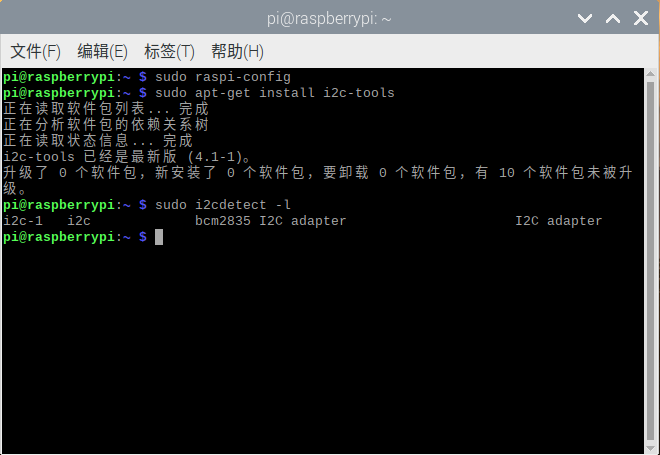
以上就是开启树莓派I2C,接下来我们安装树莓I2C库在终端输入“sudo apt-get install i2c-tools”,输入完成后就可以看到正在下载I2C库,安装完成之后可以在终端输入“sudo i2cdetect -l”检测是否安装正确,若出现类似于下面的信息就说明安装正常。
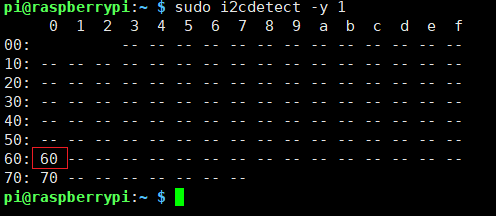
在终端输入“sudo i2cdetect -y 1”命令即可扫描接在I2C总线上的所有I2C设备,并打印出该设备的I2C总线地址,且我们的扩展板的I2C地址为0x60,如下图。
重新启动树莓派,使新的设置生效:
sudo reboot
下载程序
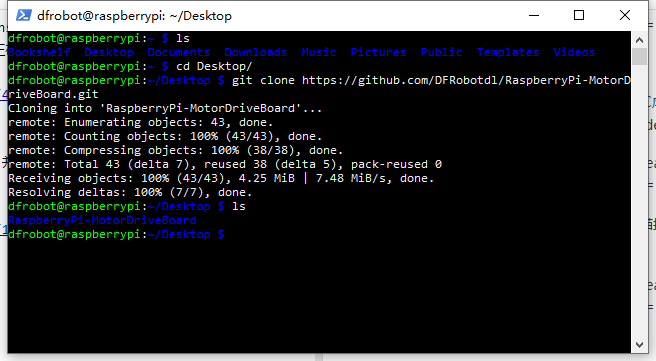
在终端依次输入一下命令
cd ...
git clone https://github.com/DFRobotdl/RaspberryPi-MotorDriveBoard.git
舵机驱动
按如下接线
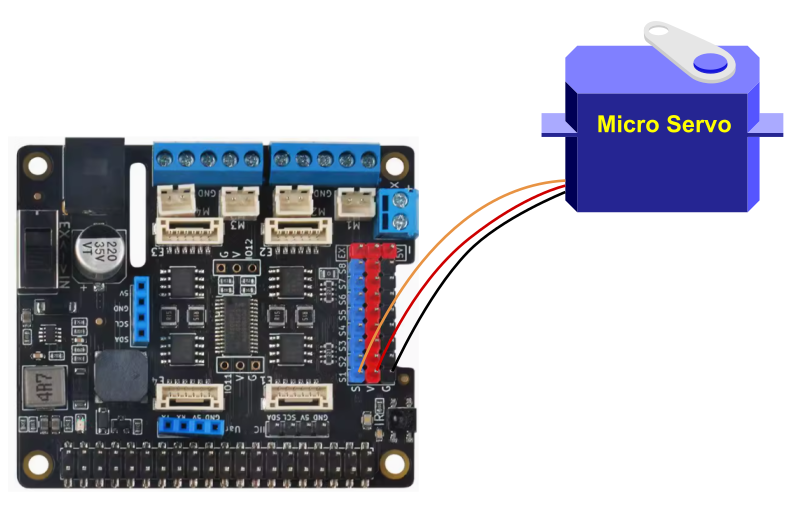
打开终端依次输入以下指令
cd RaspberryPi-MotorDriveBoard/Demo/Python/ServoTest/
python3 ./ServoTest.py

舵机会从最小角度到最大角度往复运转
直流电机驱动
按如下接线
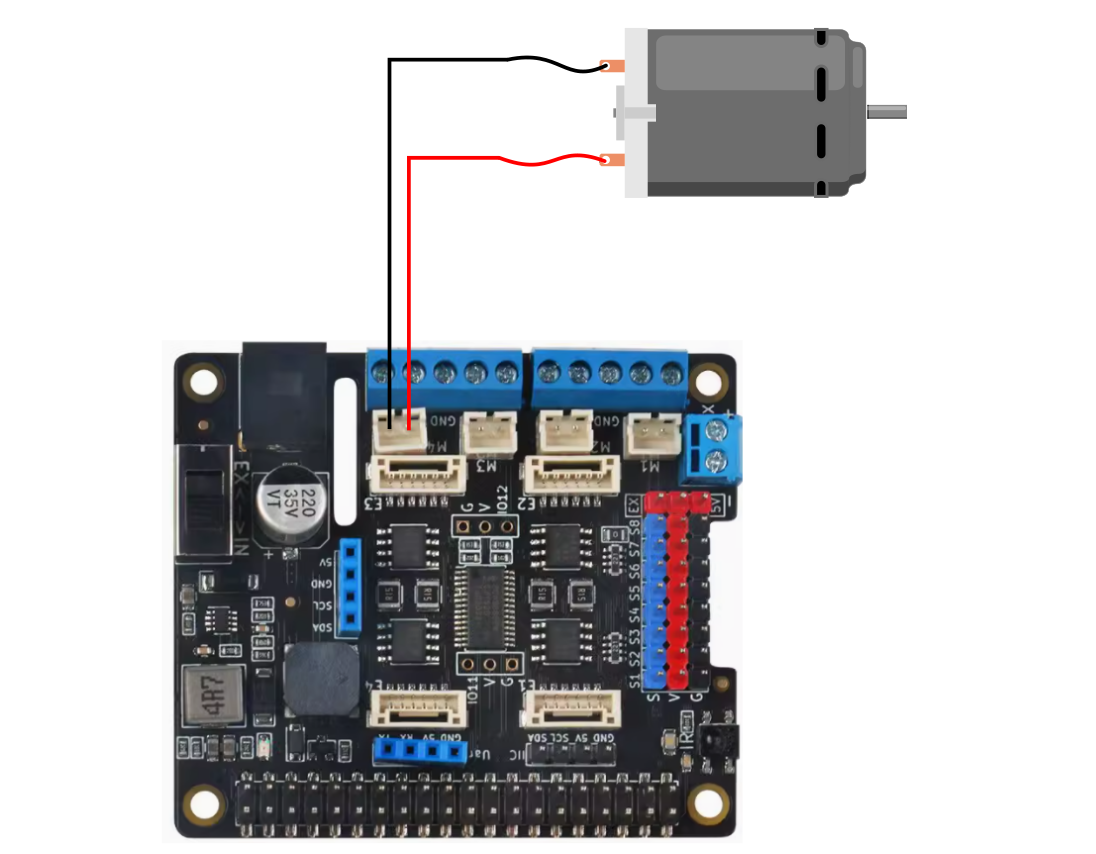
打开终端依次输入以下指令
cd RaspberryPi-MotorDriveBoard/Demo/Python/DC_MotoTest/
python3 DCTest.py
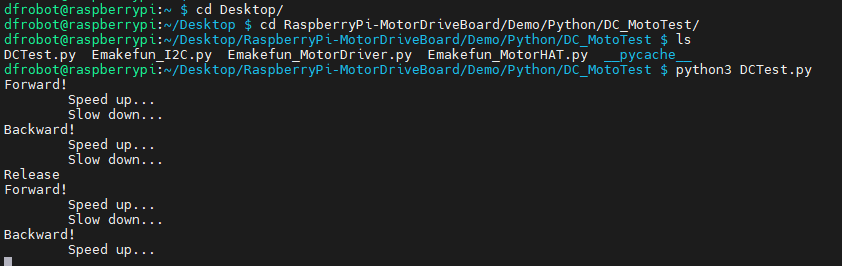
电机会以不同速度正转和反转
步进电机驱动
按如下接线
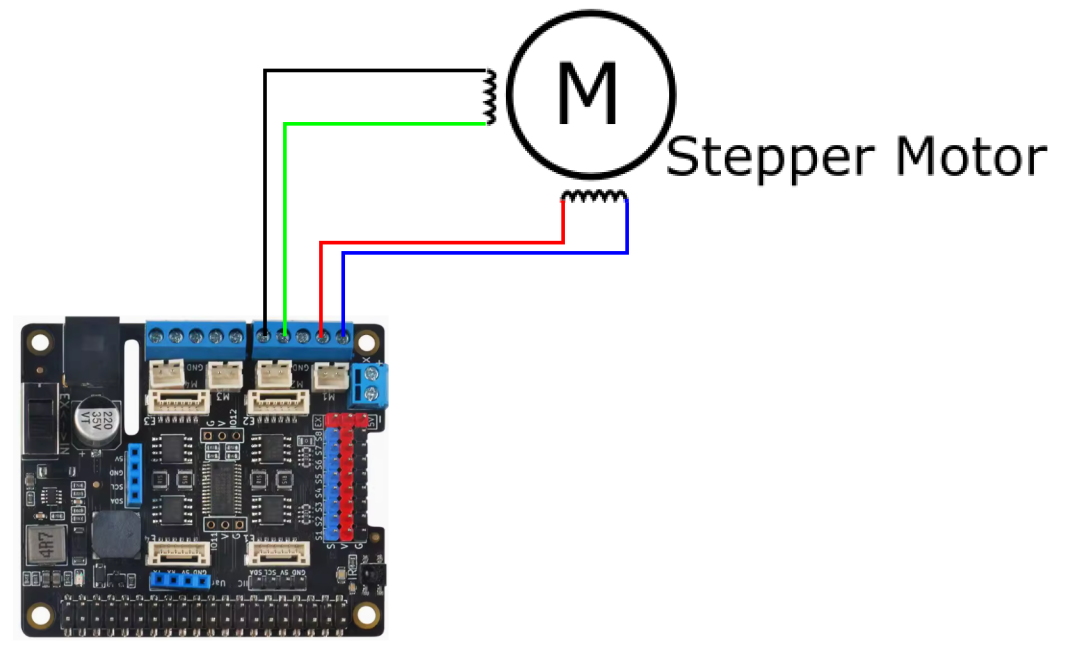
打开终端依次输入以下指令
cd RaspberryPi-MotorDriveBoard/Demo/Python/StepperTest/
python3 StepperTest.py

相关资料
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖