
我们已经对机械旋转式单线雷达司空见惯,其旋转扫描的测量方式导致寿命问题和价格居高不下。因此,DFRobot推出了CE30-C,它是一款具有大视场角132°水平视场、9°垂直视场,分辨率为320*24的3D固态激光雷达。雷达可探测视场角范围内的灰度与深度信息,刷新率20Hz,精确匹配各使用场景下的应用需求。广泛应用于工业安防、智能交通、智能家居、自动驾驶、服务机器人,物料检测等领域。
CE30-C内部无任何机械旋转部件,以保证更高的可靠性与稳定性。全固态设计、稳定可靠、寿命长,大视场角满足大范围探测的避障需求, 三维探测可输出原始点云数据,体积小、易装配。雷达内部还集成多机干扰判定和规避算法,大幅度降低多机使用时的干扰情况。
特性
- 一体化金属机身IP65防护等级
- 全固态设计 稳定可靠 寿命长
- 大视场角 满足大范围探测的避障需求
- 三维探测 可输出原始点云数据
- 体积小 易装配 可适配多种场合
产品参数
- 额定电压:DC12V±1V(≥2A)
- 功耗:≤6W
- 探测距离:0.1-4m
- 刷新速率:20fps
- 视场角:132°*9°
- 分辨率:320*24
- 工作温度:0℃-50℃
- 抗环境光:60Klux
- 通信接口:TCP
- 尺寸:794750mm
外观说明
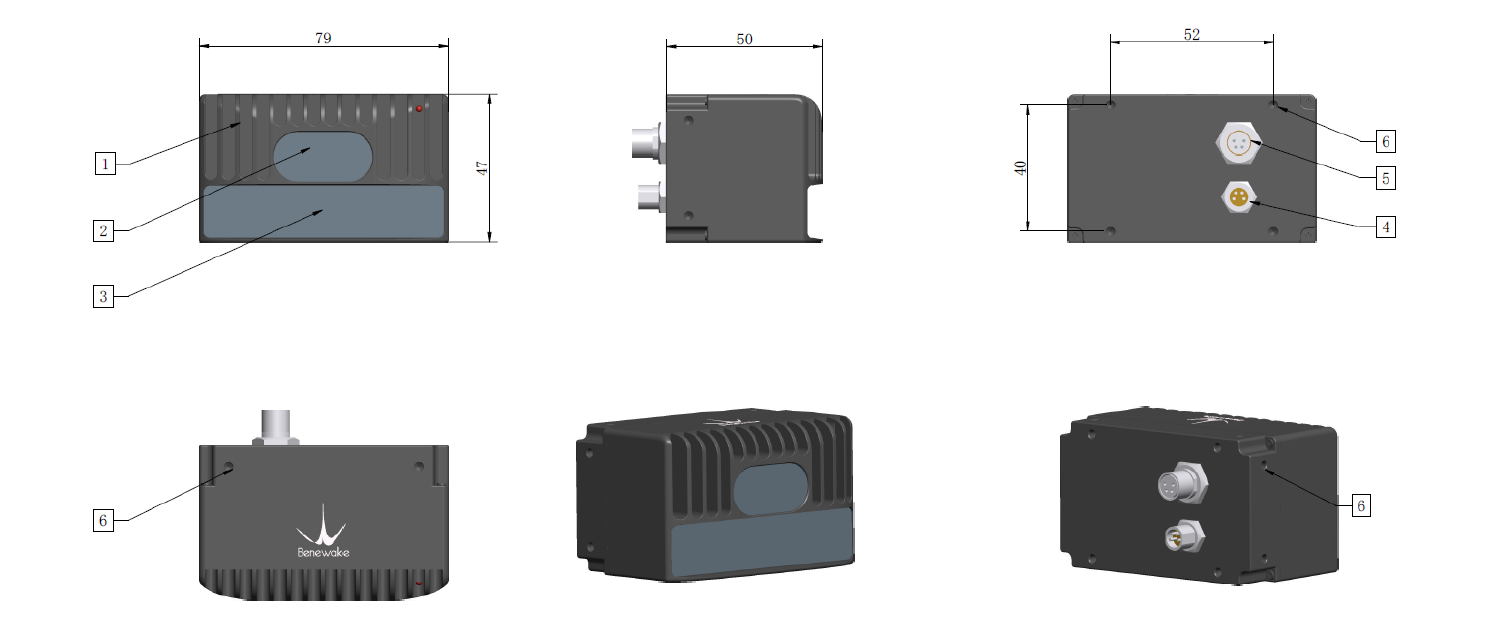
1、外壳
2、接收窗口(工作区域,勿遮挡)
3、发射窗口(工作区域,勿遮挡)
4、电源(M8航插)
5、以太网接口(M8航插)
6、设备安装孔(M3)
使用教程
准备
-
硬件
CE30-C面阵雷达
树莓派4B
-
软件
上位机使用
1、与电脑连接(电源连接DC12V)

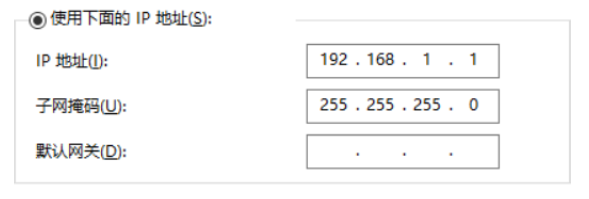
2、在控制面板 \网络和 Internet\网络连接 目录下置以太网的IP地址和子网掩码成地址和子网掩码成下图示状态所示状态
3、检查数据连接是否通畅,通过Windows运行窗口打开CMD命令窗口输入并执行命令:ping 192.168.1.80 如下图所示即为正常
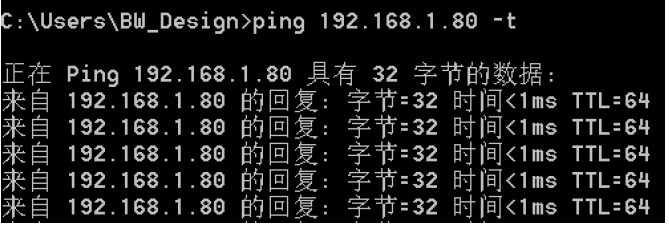
注:192.168.1.80 为CE30-C雷达的初始IP地址。若在使用过程中对雷达的IP地址进行了重新设置,上述步骤中IP地址相关部分也应进行相应操作。比如将雷达IP重新设置为 192.168.2.1,则需将连接雷达的设备IP地址也改为192.168.2. xxx 。
4、下载并解压CE30_C上位机双击CE30_Display_Release_2.3.exe程序打开上位机,出现如下图的控制台窗口,提示输入CE30-C雷达的 IP地址。回车后按提示键入1后,程序会再多出两个窗口,一个窗口为点云数据,另一个为平面数据。
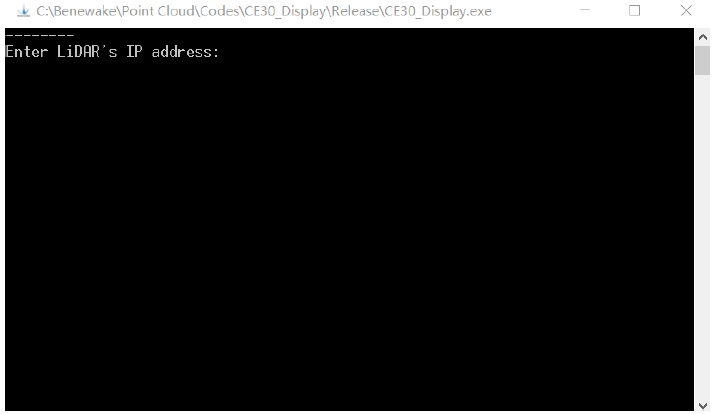
0
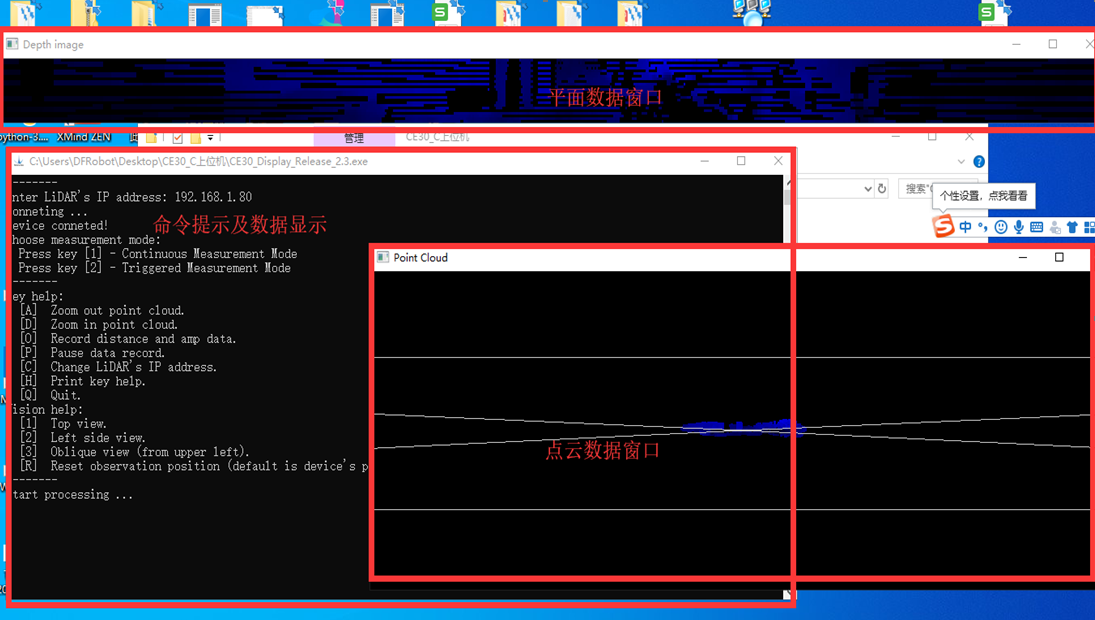
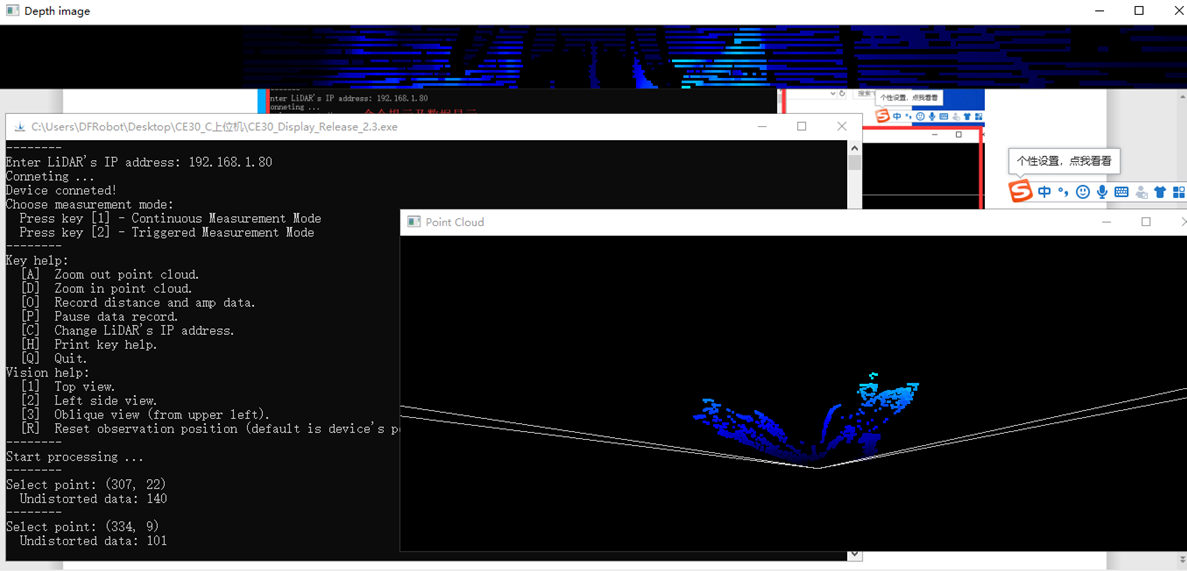
5、 平面数据窗口与点云数据窗口可以看到探测范围内物体的轮廓,点云图像窗口显示根据深度图和投影关系计算得出的雷达视场内点云图像。在该窗口内按住鼠标左键并拖动可转换点云图像的观察方向;鼠标滚轮可对点云图像进行缩放;鼠标右键重置点云图像的观察视角至初始位置。点击平面数据中的像素点可以在数据显示窗口中显示对应物体的坐标与到雷达的距离单位为CM
6、快捷键
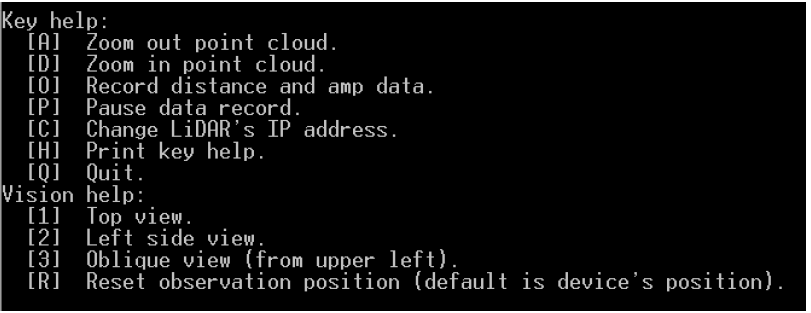
- 快捷键A:缩小点云图
- 快捷键D:放大点云图
- 快捷键O:记录畸变校正前后深度图和信号强度数据,保存于上位机目录下
- 快捷键P:停止数据记录
- 快捷键C:设置雷达的IP地址
- 快捷键H:重新在信息提示窗口中打印本快捷键提示信息
- 快捷键Q:使雷达退出工作状态,并断开上位机与雷达连接
- 快捷键1:将点云图调整至俯视视角
- 快捷键2:将点云图调整至从左侧观察的侧视视角
- 快捷键3:将点云图调整至从左上方观察的斜视视角
- 快捷键R:重置视角至初始状态(初始状态为雷达的观察视角)
7、指示灯标识说明

- 蓝色常亮; ready状态,可以连接运行
- 蓝色闪烁:运行状态
- 红色闪烁:缺失相关运行文件
- 红色常亮:严重错误(异常信号,接口通信异常)
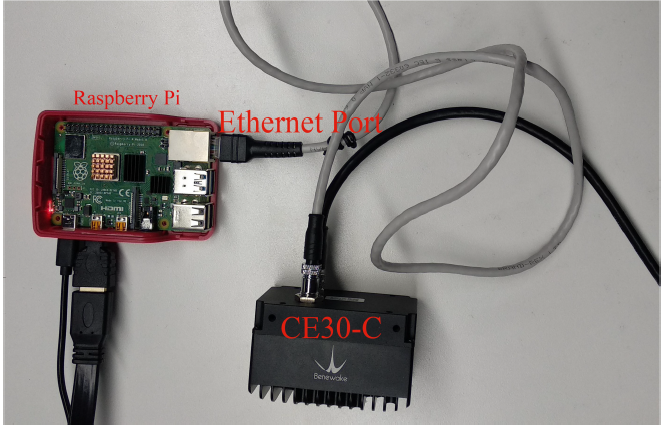
在树莓派上使用
1、安装Python依赖库与git,树莓派需要联网。如已安装,可跳过该步骤。
在终端中,依次键入如下指令,并回车:
sudo apt-get install build-essential python-dev python-smbus git
下载github上的代码
cd Desktop
git clone https://gitee.com/DFRobot/DFRobot_CE30C
2、将雷达正常通电并接入树莓派网口
3、修改树莓派网口IP地址
打开终端输入:cat /etc/resolv.conf 查找静态域名服务器

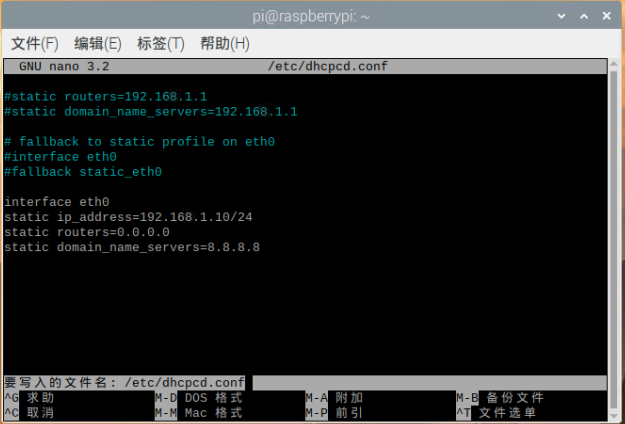
在终端输入:sudo nano /etc/dhcpcd.conf 编辑dhcpcd.conf文件,在文档末尾位置加上以下类容
interface eth0
static ip_address=192.168.1.10/24
static routers=0.0.0.0
static domain_name_servers=8.8.8.8
注意:如果修改过雷达的IP地址请修改上面相应的IP地址
"Ctrl+o"保存,"回车"确认,"Ctrl+x"退出
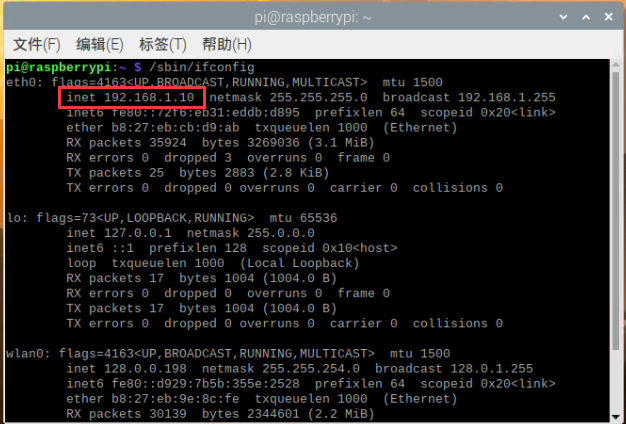
在终端输入:sudo reboot重启树莓派
树莓派重新开机后在终端输入:/sbin/ifconfig 查看IP地址,可以看到IP地址已经发生了变化。
4、运行程序,在终端中,依次键入如下指令,并回车:
cd
cd Desktop
cd DFRobot_CE30C/examples
sudo python get_CE30C_data.py
运行完后DFRobot_CE30C文件夹中会出现一个名为DATA.EXE文件,DATA.EXE就是保存的完整云点数据。
常见问题
还没有客户对此产品有任何问题,欢迎通过 qq 或者论坛联系我们!
更多问题及有趣的应用,可以访问论坛进行查阅或发帖