简介
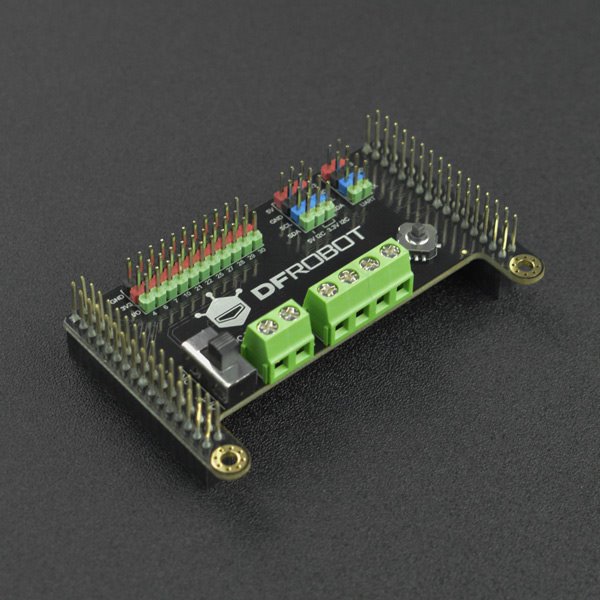
RVB2601 Gravity多功能扩展板是专为平头哥RISC-V芯片CH2601开发板定制。扩展板板载双路2A电机驱动,模拟摇杆,Gravity标准传感器接口,HuskyLens专用接口,可外接各类DFRobot Gravity系列传感器。
产品参数
-
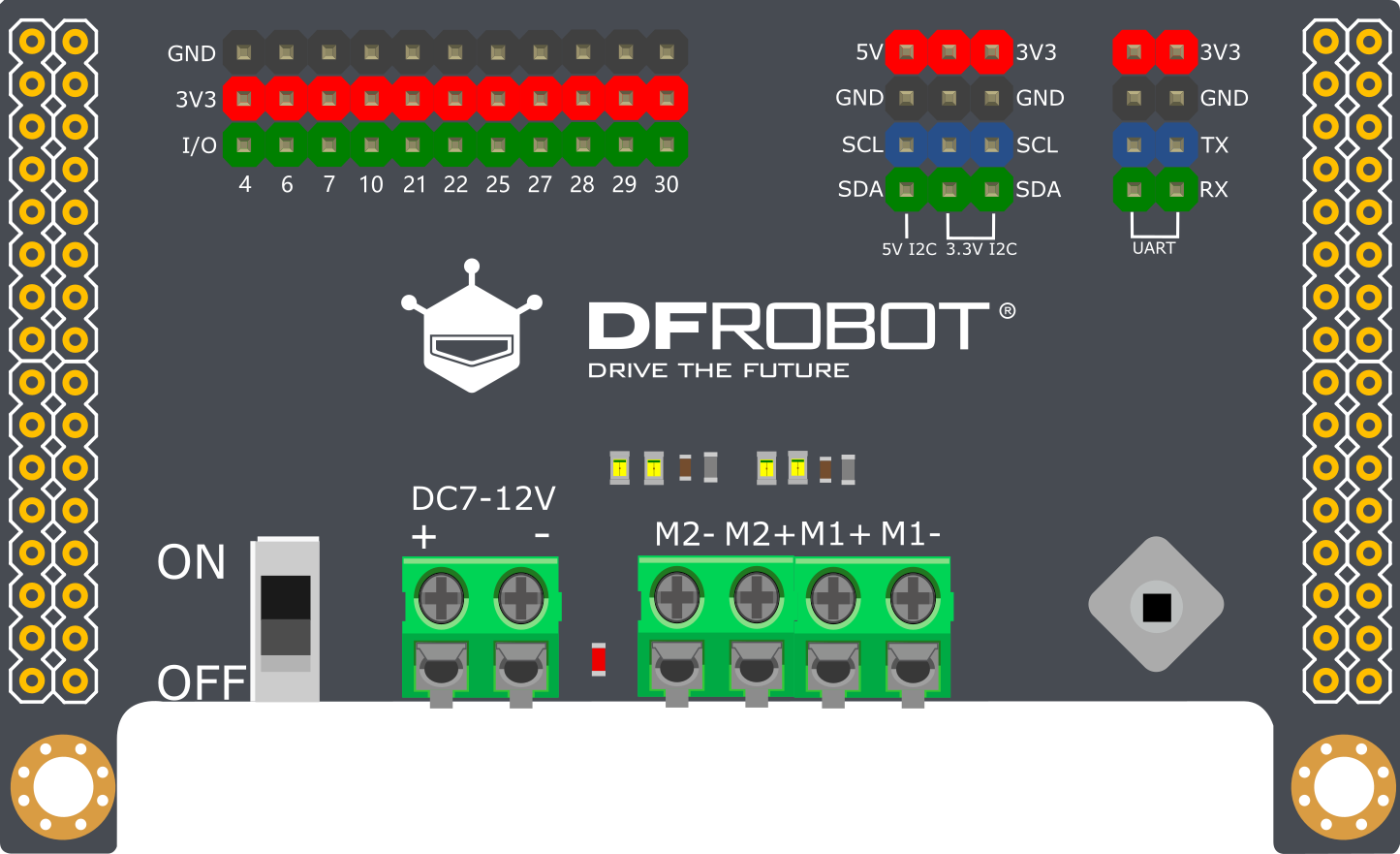
Gravity IO 3P 接口:11个
-
Gravity 3.3V I2C 4P 接口:2个
-
l Gravity 5V I2C 4P 接口:1个(HuskyLens)
-
Gravity UART 4P 接口:1个
-
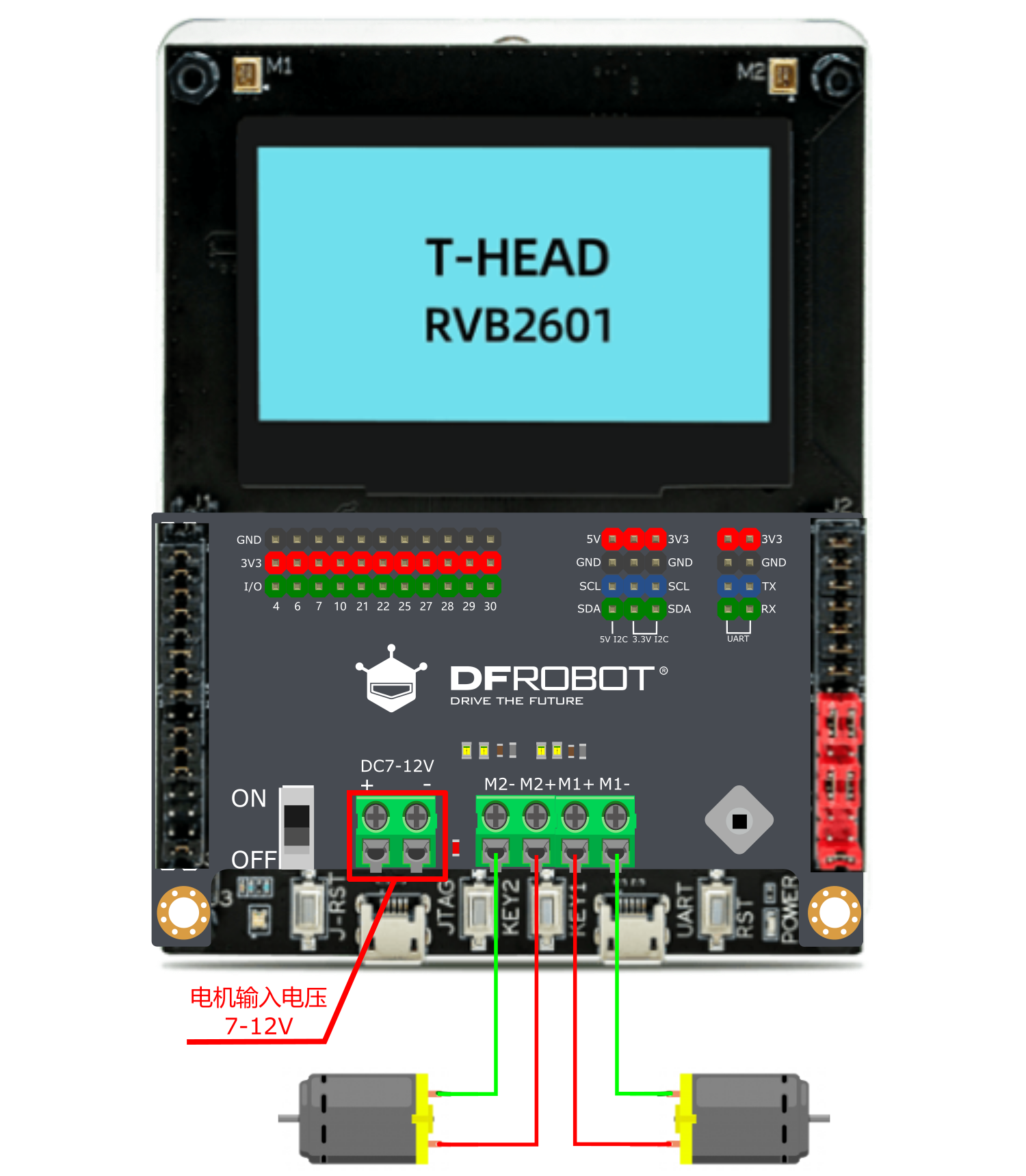
2A电机驱动 2P 接线端子:2个
-
板载一个模拟量摇杆
-
板载一个外部电源开关
- 产品尺寸:长x宽x高 78.7x48x19.5mm
引脚说明
使用教程
软硬件准备
- 硬件
- RVB2601开发板 x1
- RVB2601 Gravity多功能扩展板 x1
- 7-12V直流电源 x1
- 直流电机 x1
- 软件
- 剑池CDK集成开发环境V2.12.1 剑池CDK集成开发环境
- 下载RVB2601足球机器人 CH2601 Robot_SDK
电机驱动样例
硬件连接
安装开发环境
下载链接: 剑池CDK集成开发环境
按照提示进行安装,注意安装路径不能有中文、空格和特殊字符。
解压SDK压缩包
建议直接在桌面解压,如果移动至其他文件夹中解压,需注意路径中不能有中文、空格和特殊字符。
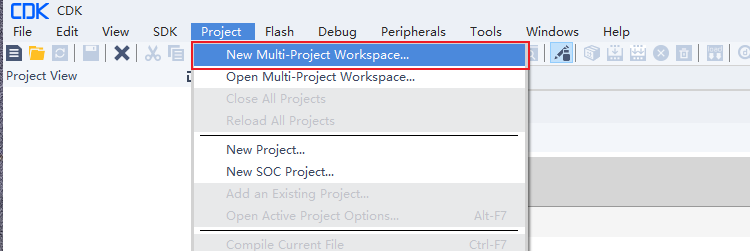
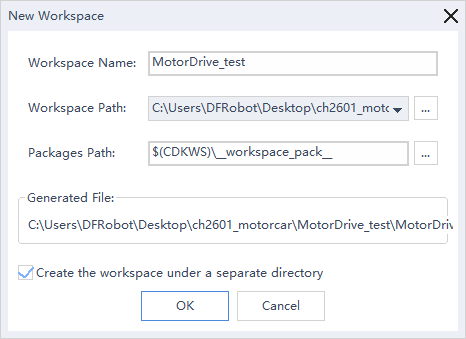
启动剑池CDK,创建工作区
名称为“MotorDrive_test”,路径为“Desktop\ch2601_motorcar”
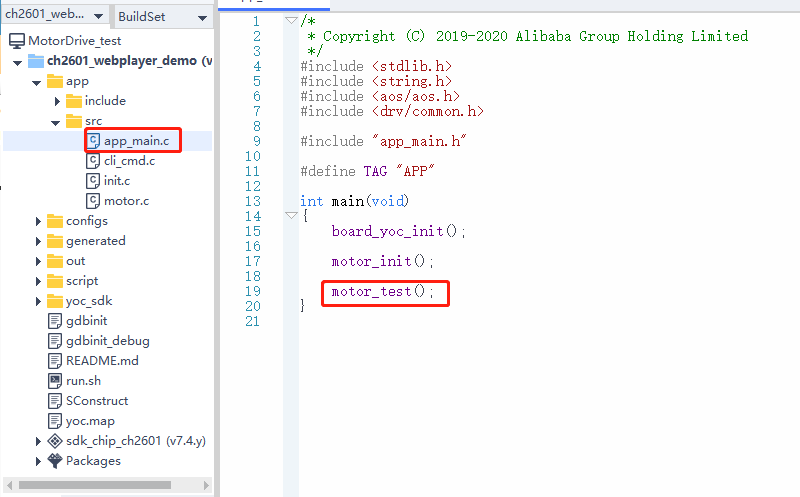
添加项目文件

在app_main.c中添加motor_test();函数
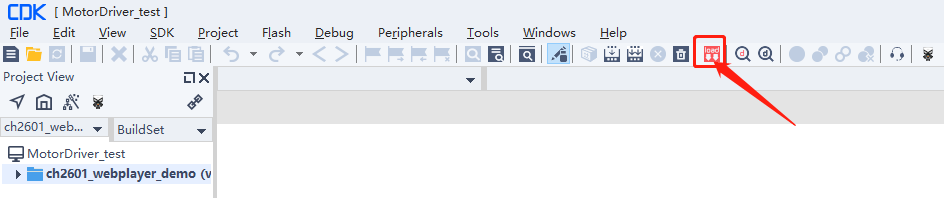
编译程序,首次编译需要较长时间

编译成功后,使用数据线连接开发板的JTAG端口,烧录程序