1. 产品简介
麦昆LITE是成熟稳定的麦昆4.2内核 + 精致ABS外壳的STEAM教育机器人。有红、绿、蓝、白四套不同配色的服装,活泼的配色也让麦昆LITE更受小朋友的喜欢。
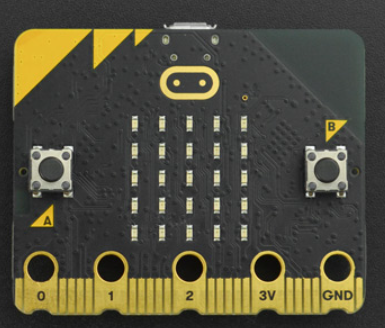
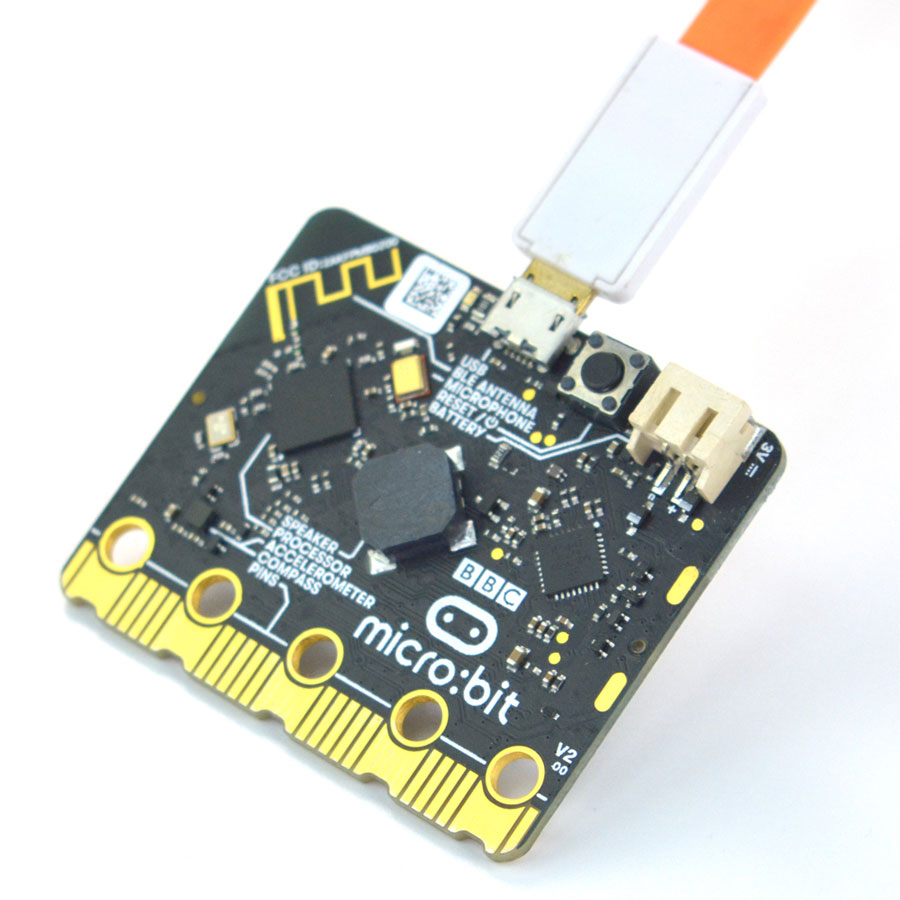
麦昆LITE支持microbitV1和V2两种主板。拥有超声波距离传感器、红外接收传感器、红外巡线传感器、LED车灯、RGB氛围灯等丰富功能。漂亮的外壳不仅更受小朋友的喜欢,也有效的保护了电路免受损坏。
2. 产品特性
-
外观精致美观,多色可选。学生不容易混淆,并且更加有兴趣。
-
无需安装,到手即用。
-
采用最新的麦昆4.2基板,性能稳定成熟。
-
兼容性强,支持microbitV1和V2主板,支持麦昆工程队。
3. 应用场景
-
自主巡线行驶机器人。
-
自主避障行驶机器人。
-
无线遥控机器人。
-
光控行驶机器人。
-
声控行驶机器人。
-
机器人教学及比赛。
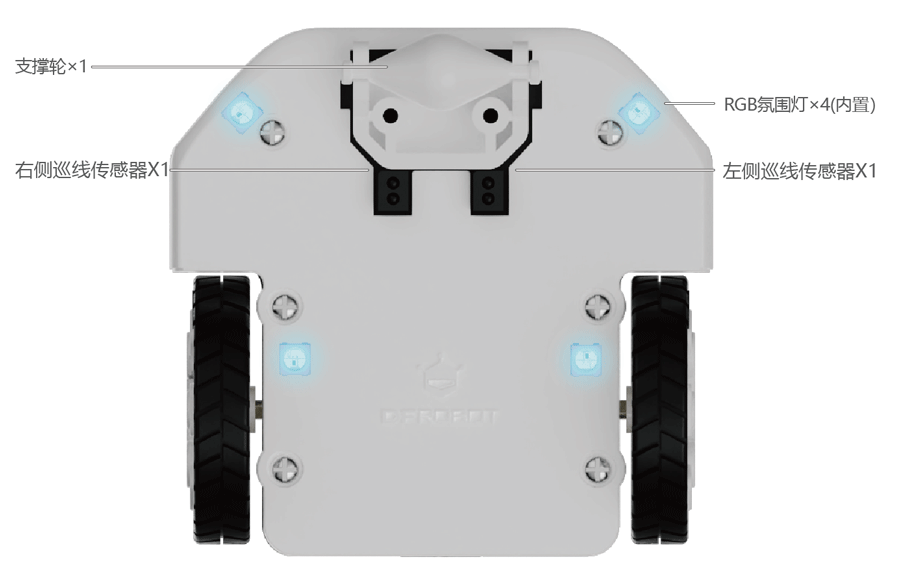
4. 功能指示图

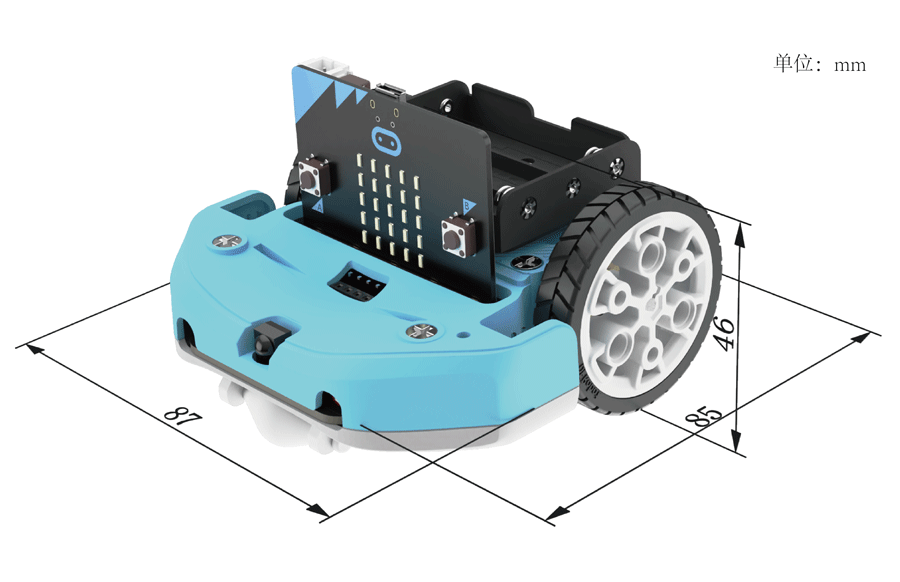
5. 产品尺寸图
6. 规格参数
-
供电电压:3.5V-3.7V锂电池
-
红外巡线传感器(高低电平)×2
-
嗡鸣器 ×1
-
红外接收(NEC编码)×1
-
LED车灯(高低电平控制)×2
-
RGB氛围灯(全彩1600万色)×4
-
SR04超声波接口(5V)×1
-
I2C接口(5V)×1
-
舵机专用接口(S1 S2) ×2
-
Gravity扩展口(P0 P1 P2) ×3
-
N20金属减速电机 ×2
-
电机减速比:1:150
-
电机最大转速:133转/分
-
电机驱动方式:PWM电机驱动
-
外壳材质:环保ABS
-
支撑轮材质:POM
-
车轮材质:环保ABS
-
轮胎材质:环保橡胶
-
编程方式:makecode图形化编程、Mind+图形化编程
-
产品尺寸:宽87mm × 长85mm × 高46mm(不含micro:bit主板高度)
-
产品重量:117.30g(不含电池,不含micro:bit主板及周边配件)
7. 电池的选择与安装
7.1 电池选择
麦昆LITE使用三节1.5V AAA型号的碱性电池。电池有安装正负极之分,每个电池在其表面都有印刷正负极标识,如下图:

7.2 安装方式
在电池盒的内部,标注了电池安装的正负极,安装电池的时候,正负极标识和电池上必须对应。并且,在安装电池的时候,务必确认电源开关处于 "OFF" 状态。

8. 快速上手指南
准备一块microbit主板和一根MicroUSB数据线。
将micro:bit主板通过USB线插在电脑的USB接口。此时,电脑出现了一个移动设备。盘符为"MICROBIT"的移动盘。
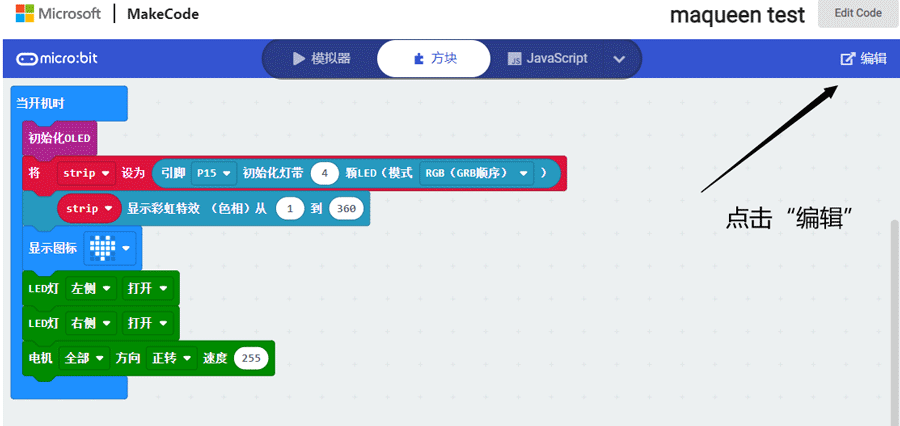
点击示例程序链接:https://makecode.microbit.org/_7CjMuxMF84qC
在打开的页面点击 “编辑” 。
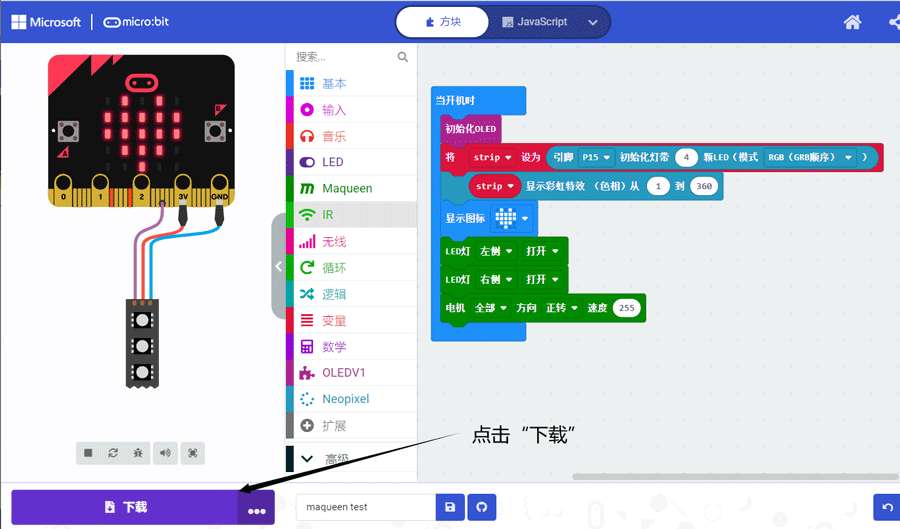
在打开的页面点击 "下载" 下载程序。将程序下载到 "MICROBIT" 盘符。下载程序的时候,micro:bit主板的下载指示灯会闪烁,需要耐心等待大概10秒。闪烁停止后,程序下载完成。
将下载好程序的主板插在麦昆的主板插座上。
将麦昆尾部的电源开关拨到ON位置,打开麦昆的电源。
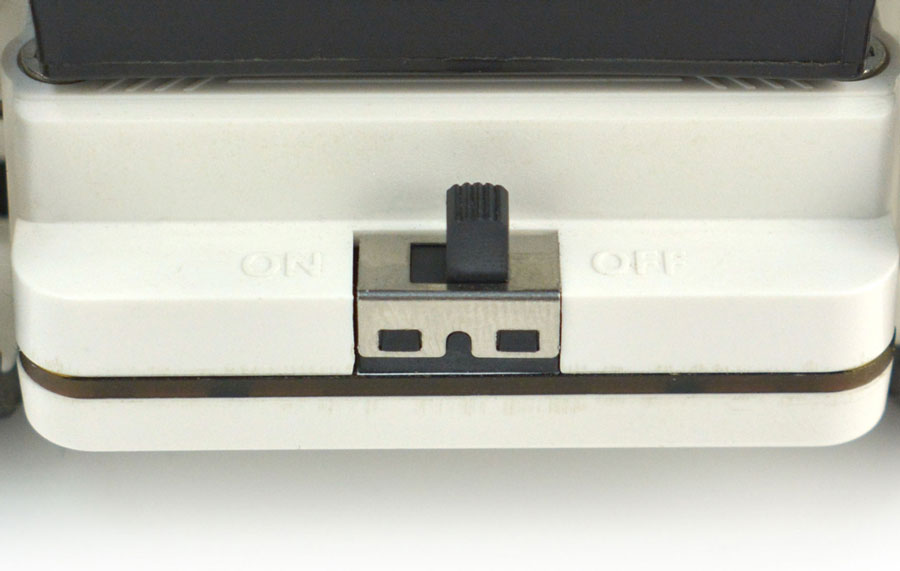
此时,你已成功的将程序下载到micro:bit,并正确的驱动了麦昆车灯和底部的氛围灯亮起,麦昆的轮子开始往前转动。
9. MakeCode在线图形化编程
本教程默认你已经会使用micro:bit及MakeCode的基础上开展。主要介绍麦昆LITE的使用方法。
9.1 加载麦昆运行库
打开MakeCode编程页面,链接:Microsoft MakeCode for micro:bit (microbit.org)
在打开的页面点击 "新建项目" 新建一个项目。

在弹出的窗口中输入你想起的名字,本例中起名为 "maqueen1" 。然后点击 "创建" 确定。
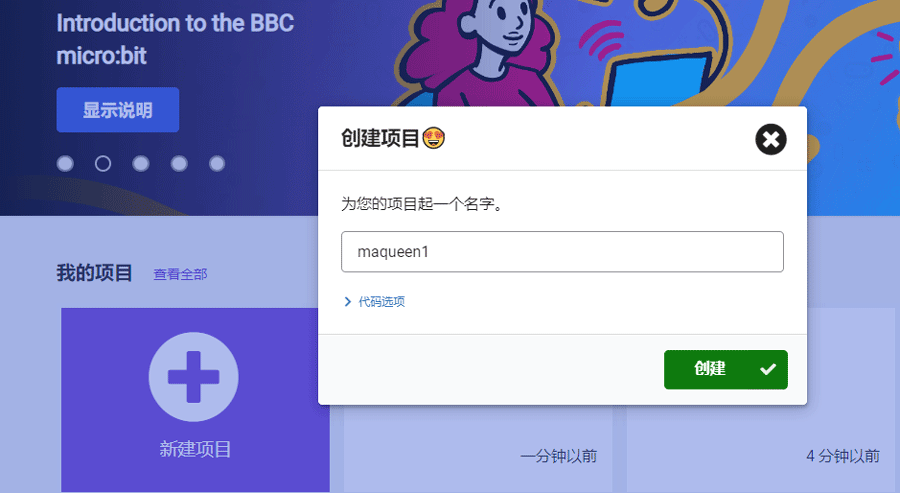
点击"创建"后,进入MakeCode编程界面,如下图:
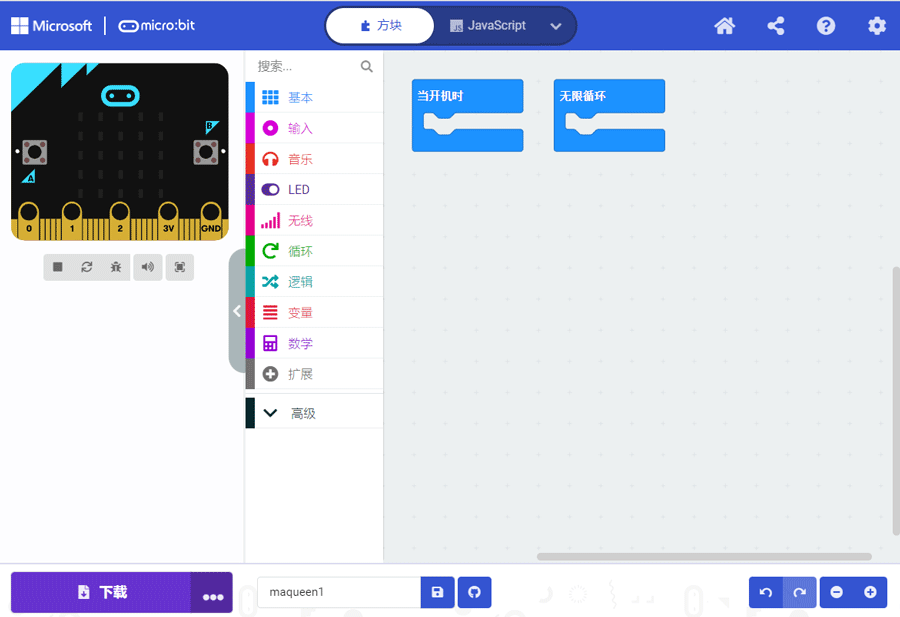
点击右上角的设置图标,在下拉菜单中点击 "扩展"。

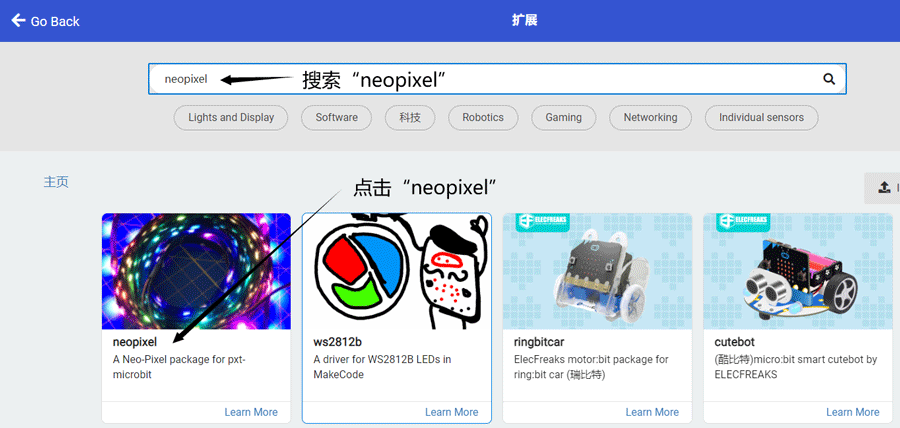
在打开的页面搜索“dfrobot”,然后在搜索的结果里点击“maqueen”。

使用同样的方法,在扩展窗口加载neopixel库。
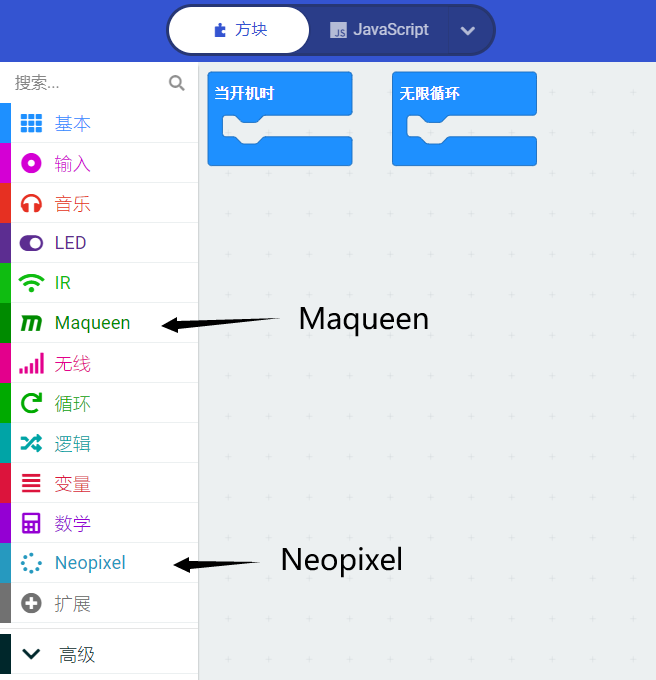
库加载完成后的情况:
9.2 打开车灯,准备出发
在本节中,我们将让麦昆的车灯反复闪烁,告诉大家,我们准备出发了。
9.2.1 编辑程序
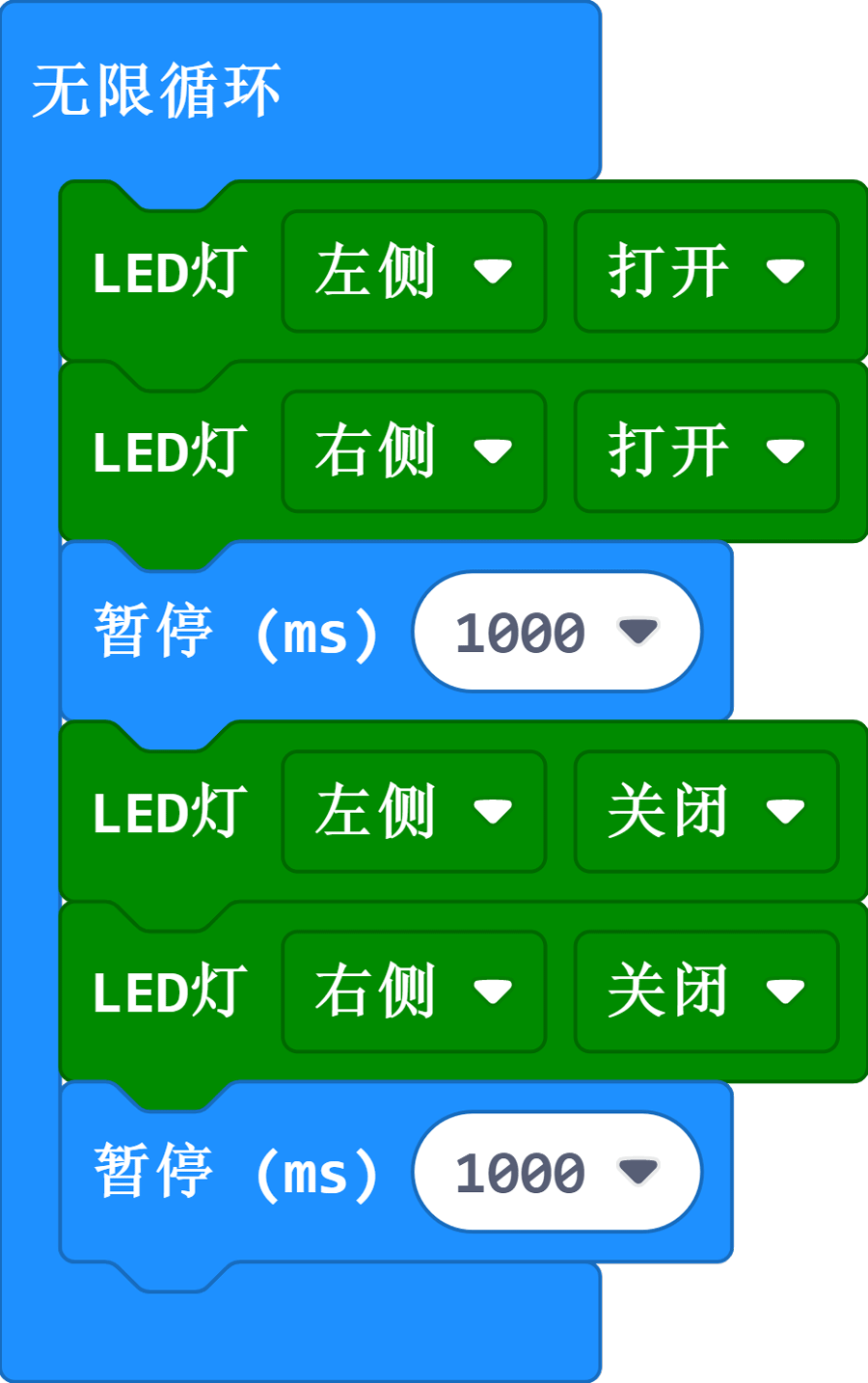
以下程序思路为:打开左右车灯,间隔1秒后再关闭左右车灯,循环执行。
程序链接:https://makecode.microbit.org/_YsgWhr2LaDcj
程序文件:
程序截图:
9.2.2 程序执行结果
麦昆前方的两颗红色LED车辆开始按1秒钟的间隔时间闪烁。

9.3 启动发动机,开始预热
在本节中,我们将让麦昆底部的氛围灯呈现急促呼吸显示,告诉大家,我们准备出发了。
9.3.1 编辑程序
以下程序思路为:设置RGB灯的颜色变量R、G、B为0,先逐渐增加变量值,再逐渐减小变量值,呈现呼吸灯的效果。
程序链接:https://makecode.microbit.org/_du25LDamJgYs
程序文件:
程序截图:

9.3.2 程序执行结果
底部的氛围灯的光线从弱到亮再从亮到弱逐渐变化。

9.4 出发!
在本节中,将鸣喇叭三次后踩下麦昆的电驱引擎,让麦昆前进。
9.4.1 编辑程序
以下程序思路为:播放旋律实现三次喇叭声响,然后设置电机全部正转。
程序链接:https://makecode.microbit.org/_ifX0yU6UYCWA
程序文件:
程序截图:

9.4.2 程序执行结果
麦昆响三次喇叭后,开始以50的速度前进。
9.5 控制电机模块
在本节中,我们来学习如何控制电机模块来驱动麦昆前进、后退、左转、右转、暂停,以及调整它的速度。
9.5.1 编辑程序
以下程序思路为:设置左右电机方向和速度相同,则实现小车前进或后退;设置左右电机方向相同、速度不同来实现小车左转、右转。
程序链接:https://makecode.microbit.org/_9UVTbzbpceMK
程序文件:
程序截图:

9.5.2 程序执行结果
麦昆循环执行:前进2秒,左转2秒,右转2秒,后退2秒。
9.6 读取红外键值
麦昆车头装载了红外接收传感器,可以接收红外遥控器发送的红外数据。本节中,我们来学习如何接收红外数据、读取红外键值,并在micro:bit点阵屏上显示。
9.6.1 红外遥控器及其键值
本节中所用的红外遥控器以及对应键值如下图所示。
红外遥控器链接:https://www.dfrobot.com.cn/goods-142.html

9.6.2 编辑程序
以下程序实现的功能为:当小车接收到红外数据,就在micro:bit点阵屏上显示转化后的红外键值。
程序链接:https://makecode.microbit.org/_Uu14FC529YoM
程序文件:
程序截图:
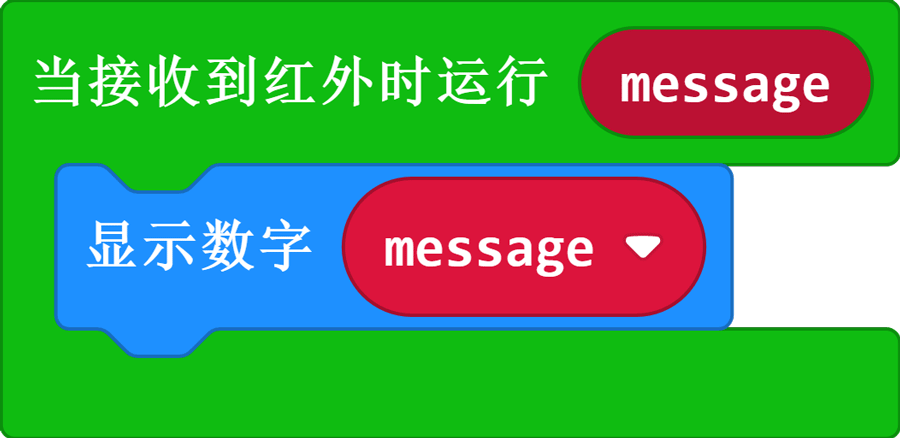
9.6.3 程序执行结果
按下红外遥控器上的按键,micro:bit点阵上则显示对应的红外键值。

9.7 红外遥控
前面学习了控制电机模块和读取红外键值,本节中将结合这两个内容,用红外遥控器来操控麦昆。
9.7.1 编辑程序
以下程序实现的功能为:通过红外遥控器来控制小车的运动。
程序链接:https://makecode.microbit.org/_MMbLtx05ARxx
程序文件:
程序截图:

9.7.2 程序执行结果
红外线遥控器的2、8、4、6、5按键分别可以遥控麦昆前进、后退、左转、右转、停止。
9.8 读取巡线传感器
麦昆有左右两个巡线传感器,如下图所示,能准确识别黑色和白色区域。

9.8.1 编辑程序
以下程序实现的功能为:在micro:bit点阵屏上显示巡线传感器的输出信号。放在黑色区域上,输出信号为0;若是放在白色区域上,输出信号为1。
程序链接:https://makecode.microbit.org/_EvtX1yD0RWpj
程序文件:
程序截图:
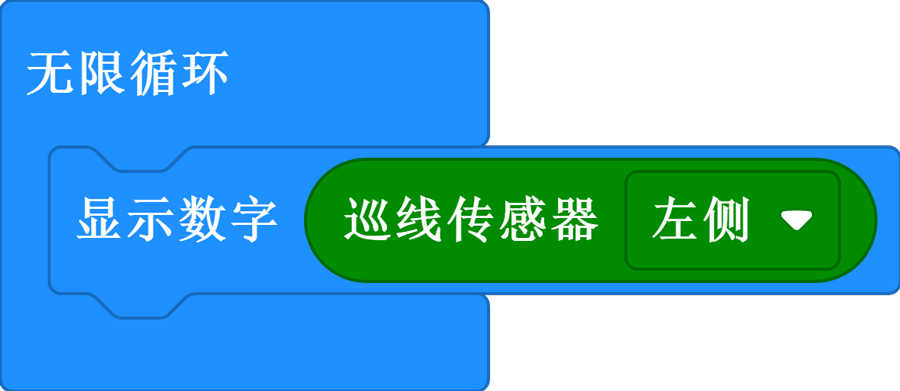
9.8.2 程序执行结果
巡线传感器放在黑色区域上时,microbit点阵屏上显示数字0;巡线传感器放在白色区域上时,并microbit点阵屏上显示数字1 。
9.9 自动巡线行驶
上一节学习了巡线传感器的功能,接下来我们将学习更有趣的玩法——巡线行驶。
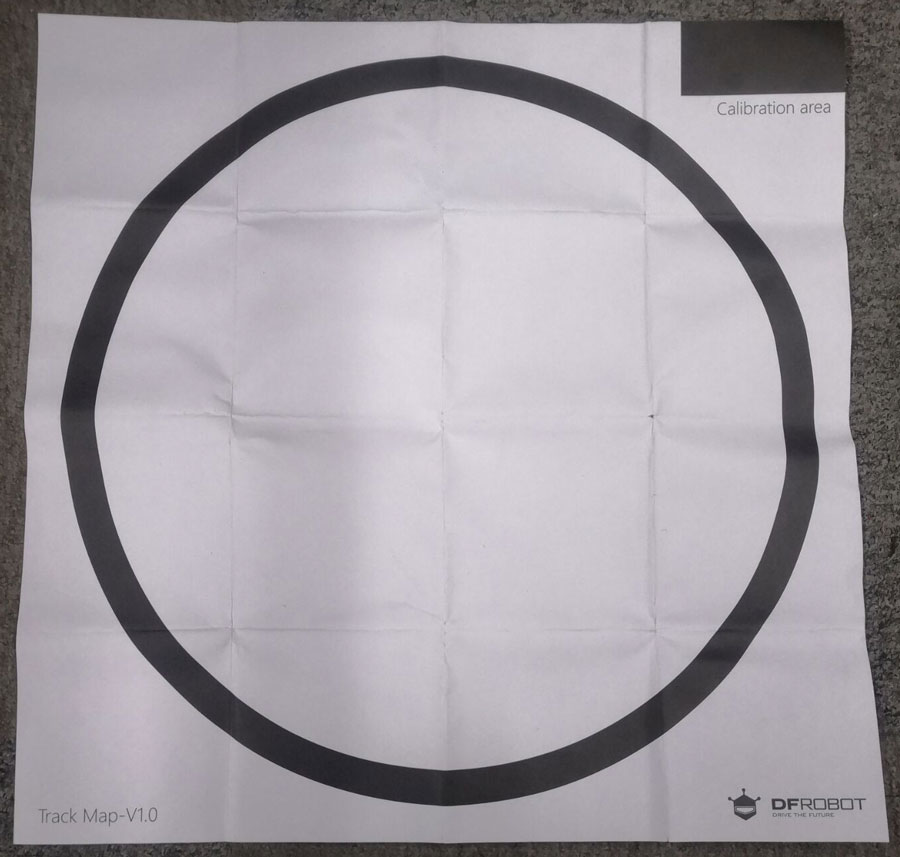
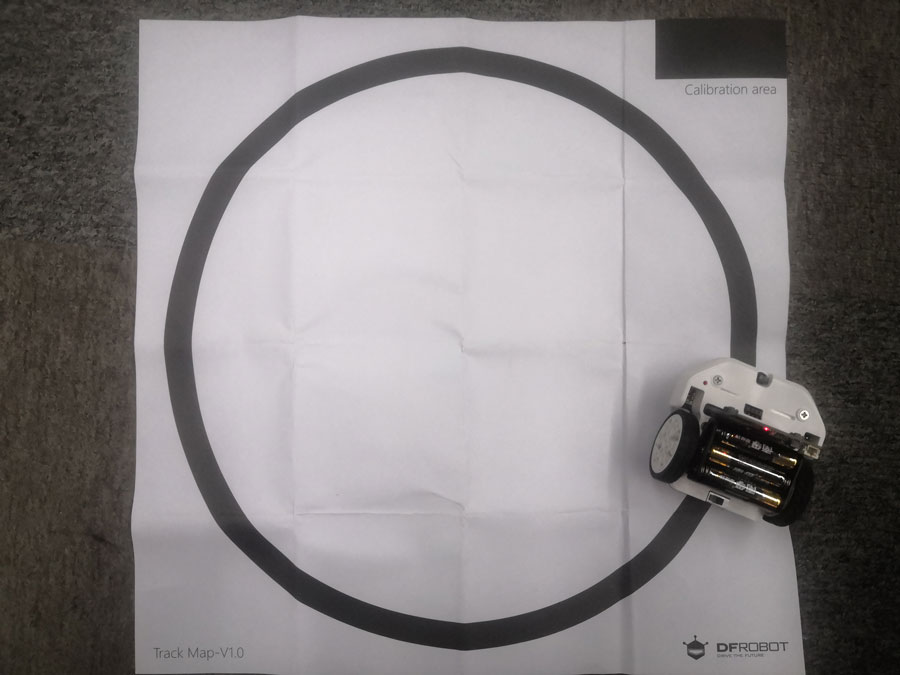
9.9.1 巡线地图
这里我们用到的是产品包装里的巡线地图。
9.9.2 编辑程序
以下程序实现的功能为:两个巡线传感器同时进行判断,确保小车一直沿着黑色线条行驶。
程序链接:https://makecode.microbit.org/_brAU7kg3Y3yx
程序文件:
程序截图:
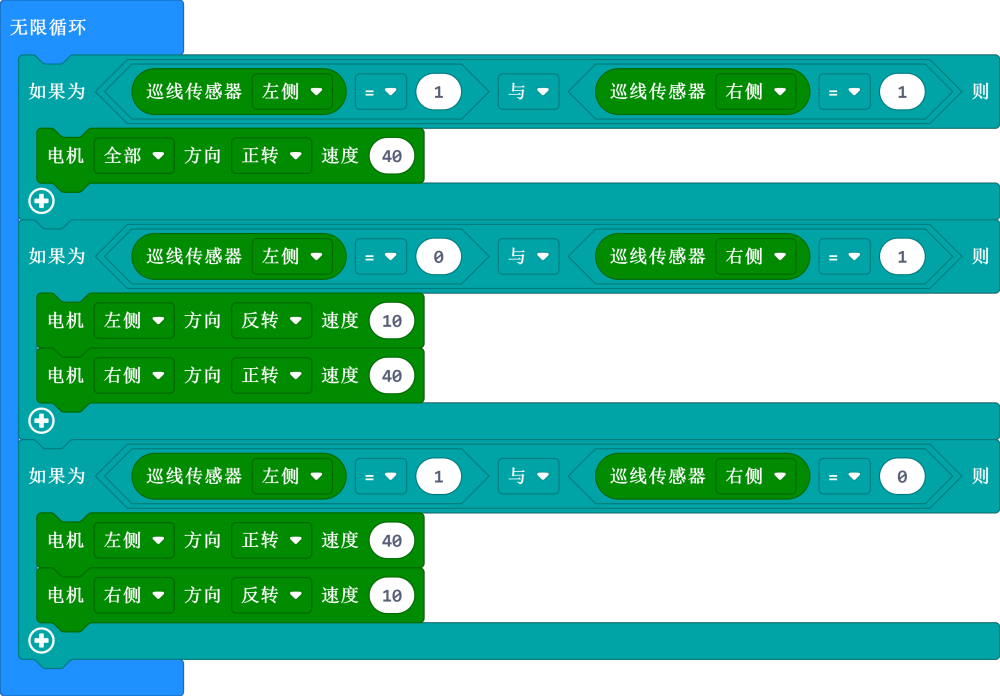
9.9.3 程序执行结果
小车自动巡线行驶成功,但由于地图较小,小车行驶的速度设置得比较慢。
9.10 避开障碍,自动行驶
麦昆在行驶的过程中发现了障碍物,这时候,麦昆启动了自动行驶模式,利用前方的超声波探测障碍物的距离,从而避开障碍物。
9.10.1 硬件准备
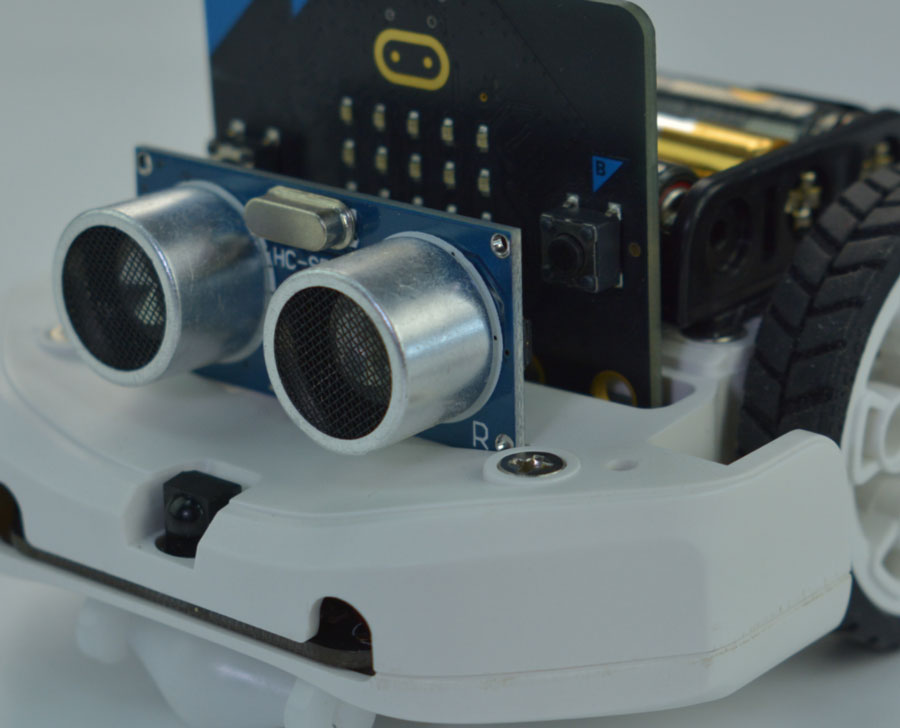
拿出包装内的超声波传感器,如下图:
将超声波传感器插在麦昆前方的超声波接口,如下图:
9.10.2 编辑程序
以下程序实现的功能为:对超声波检测的距离进行判断,当距离小于30cm,小车随机转弯,实现避障。
程序链接:https://makecode.microbit.org/_V0yFaqJ4EEkD
程序文件:
程序截图:
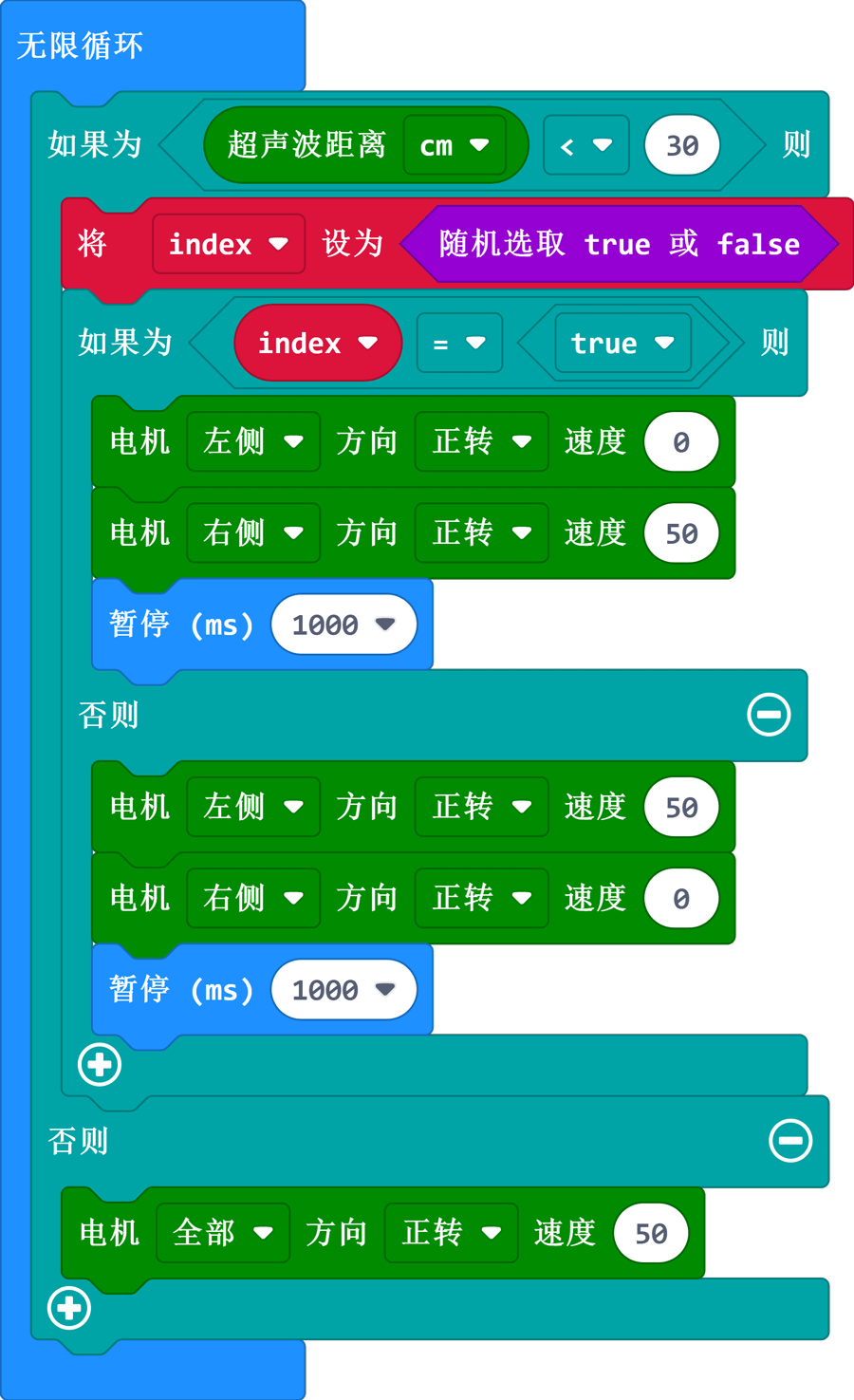
9.10.3 程序执行结果
打开电源,麦昆开始往前行驶,当检测到前方30cm左右有障碍的时候,麦昆会随机选择往左转还是右转一个角度,然后再继续行驶。
9.11 黑夜探索-光控麦昆
micro:bit主板自带了光线传感器,可以利用光线传感器让麦昆在黑暗中发现了光就前进,没有光线就停止。
9.11.1 编辑程序
以下程序思路为:检测到光,电机全部打开,否则电机全部停止。
程序链接:https://makecode.microbit.org/_CmV53a3sHhMs
程序文件:
程序截图:
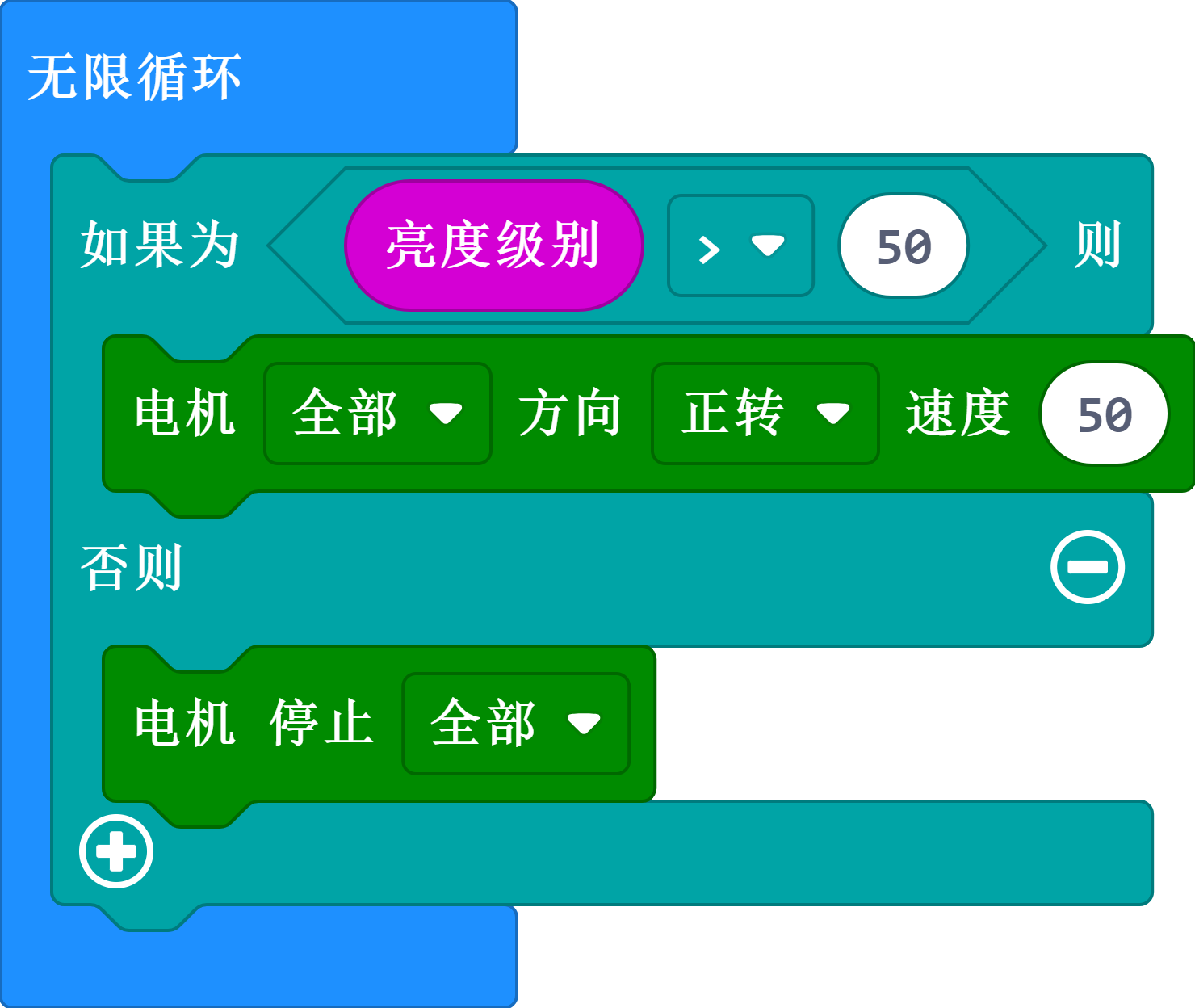
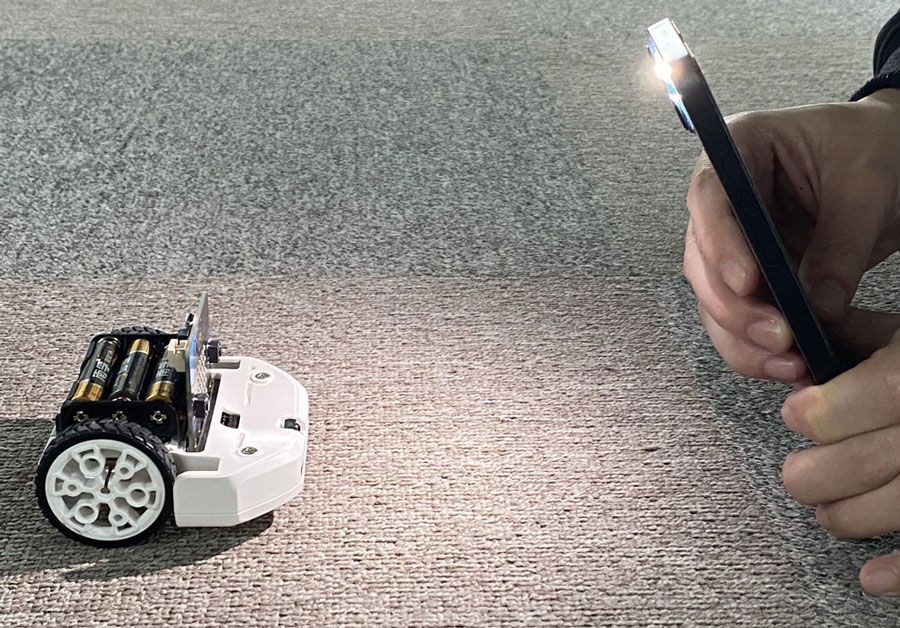
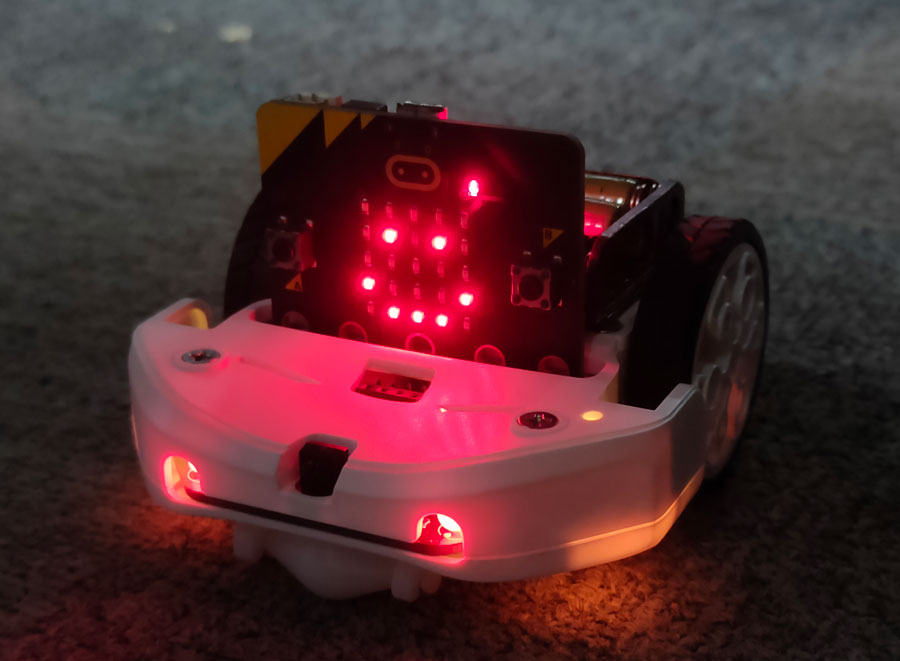
9.11.2 程序执行结果
下载好程序,打开电源,将麦昆放在地上,麦昆不动。打开手电筒,对准microbit的正面,麦昆开始朝前行驶。移开手电筒,麦昆停止。
9.12 寻找声音-声控麦昆(仅支持micro:bit V2.0以上主控)
micro:bit V2.0以上的主板新增了麦克风传感器,可以感知外界的声音。可利用这个特性让麦昆听从声音的指挥。
9.12.1 编辑程序
以下程序实现的功能为:拍手控制小车底部的RGB灯,拍一次改变一种颜色,并且在点阵屏上切换一种图案。
程序链接:https://makecode.microbit.org/_50h4LHPqj4FA
程序文件:
程序截图:

9.12.2 程序执行结果
依次拍手,小车底部的RGB灯依次呈现红色、橙色、黄色、绿色、蓝色、紫色、白色,并且点阵屏上依次显示图案。
9.13 GamePad for micro:bit-遥控麦昆
本例程中,我们通过程序将模拟摇杆设置为开关量,用于控制小车前进,后退,左转,右转,左右按键(F、D按键)控制左右车灯的亮灭。
9.13.1 硬件准备
遥控手柄链接:https://www.dfrobot.com.cn/goods-1674.html

9.13.2 编辑程序
以下程序实现的功能为:模拟杆控制小车的运动方向,F按键按下左车灯亮,D按键按下右车灯亮。
手柄端程序链接:https://makecode.microbit.org/_i1fAXXFhR754
程序文件:
程序截图:
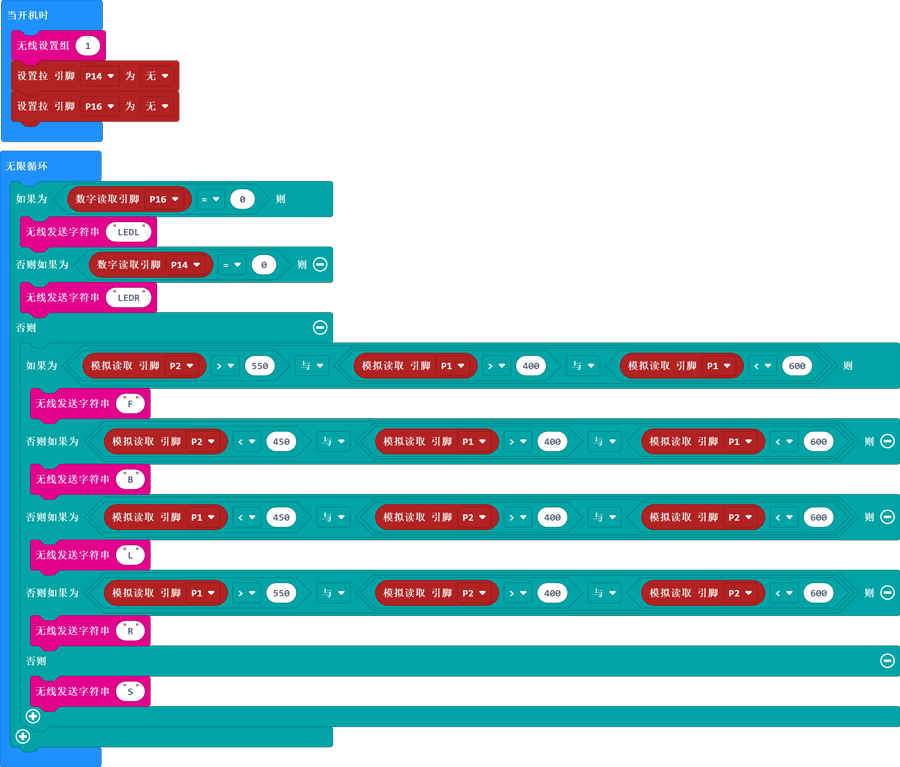
小车端程序链接:https://makecode.microbit.org/_dz1hDwYpof0k
程序文件:
程序截图:

9.13.3 程序执行结果
| 手柄动作 | 小车运动方式 |
|---|---|
| 向上拨动摇杆 | 小车前进 |
| 向下拨动摇杆 | 小车后退 |
| 向左拨动摇杆 | 小车左转 |
| 向右拨动摇杆 | 小车右转 |
| 摇杆处于中间位置 | 小车停止 |
| 按键F(蓝色按键) | 左车灯亮 |
| 按键D(黄色按键) | 右车灯亮 |
在上个例程中,只能控制小车前进、后退、左转、右转,不能控制小车的速度。下个例程中,程序使用摇杆模拟量控制的方式,同时控制小车的速度和方向,摇杆拨动的越多速度越快。左右按键(F、D按键)控制左右车灯的亮灭。
9.13.4 编辑程序
以下程序实现的功能为:模拟杆控制小车的运动方向和速度,F按键按下左车灯亮,D按键按下右车灯亮。
手柄端程序链接:https://makecode.microbit.org/_KLDU7p4ar7FL
程序文件:
程序截图:

小车端程序链接:https://makecode.microbit.org/_CyJWYvh1y94k
程序文件:
程序截图:

9.13.5 程序执行结果
摇杆拨动的幅度越大,小车的速度越快。
| 手柄动作 | 小车运动方式 |
|---|---|
| 向上拨动摇杆 | 小车前进 |
| 向下拨动摇杆 | 小车后退 |
| 向左拨动摇杆 | 小车左转 |
| 向右拨动摇杆 | 小车右转 |
| 摇杆处于中间位置 | 小车停止 |
| 按键F(蓝色按键) | 左车灯亮 |
| 按键D(黄色按键) | 右车灯亮 |
9.14 麦昆装载机
在本节中,我们将学习麦昆的舵机驱动。这里我们用到麦昆装载机配件,加上前面用过的红外遥控器,来实现麦昆另一种玩法。
9.14.1 硬件准备
麦昆装载机配件:https://www.dfrobot.com.cn/goods-2679.html

安装方法如下:
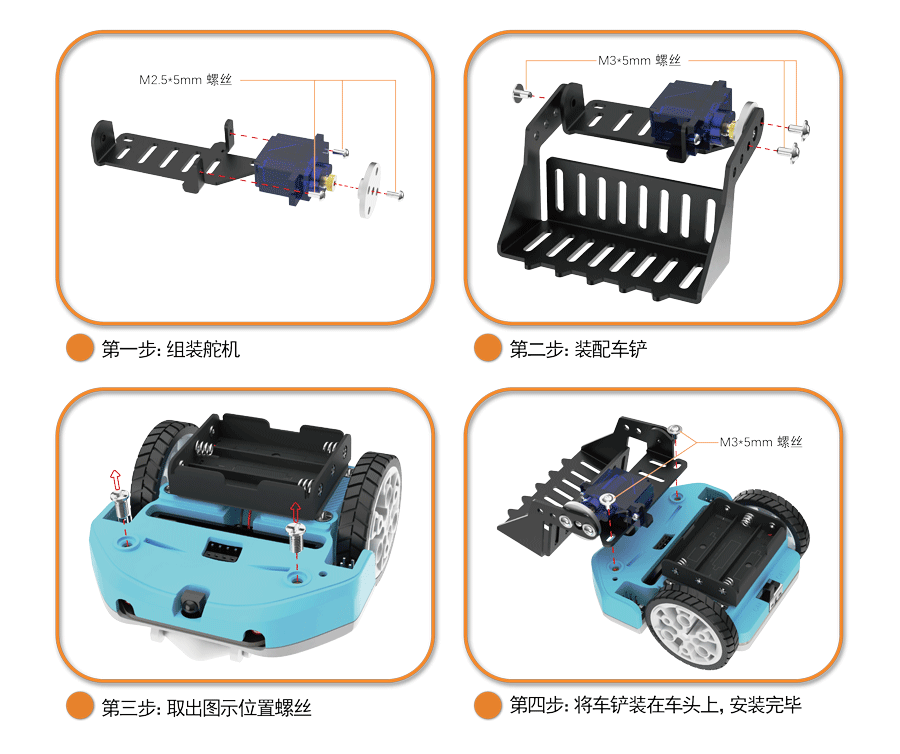
最后,将舵机连线按如图方式插入麦昆的S1接口,注意插入的方向,棕色线对应黑色的接口,红色线对应红色的接口,橙色线对应绿色的接口:

硬件准备完成,如下图所示:

9.14.2 控制舵机
在本节中,我们来学习舵机的基本控制方法。
9.14.2.1 编辑程序
以下程序实现的功能为:让铲子上下转动。
程序链接:https://makecode.microbit.org/_1wHJrqgRYHko
程序文件:
程序截图:
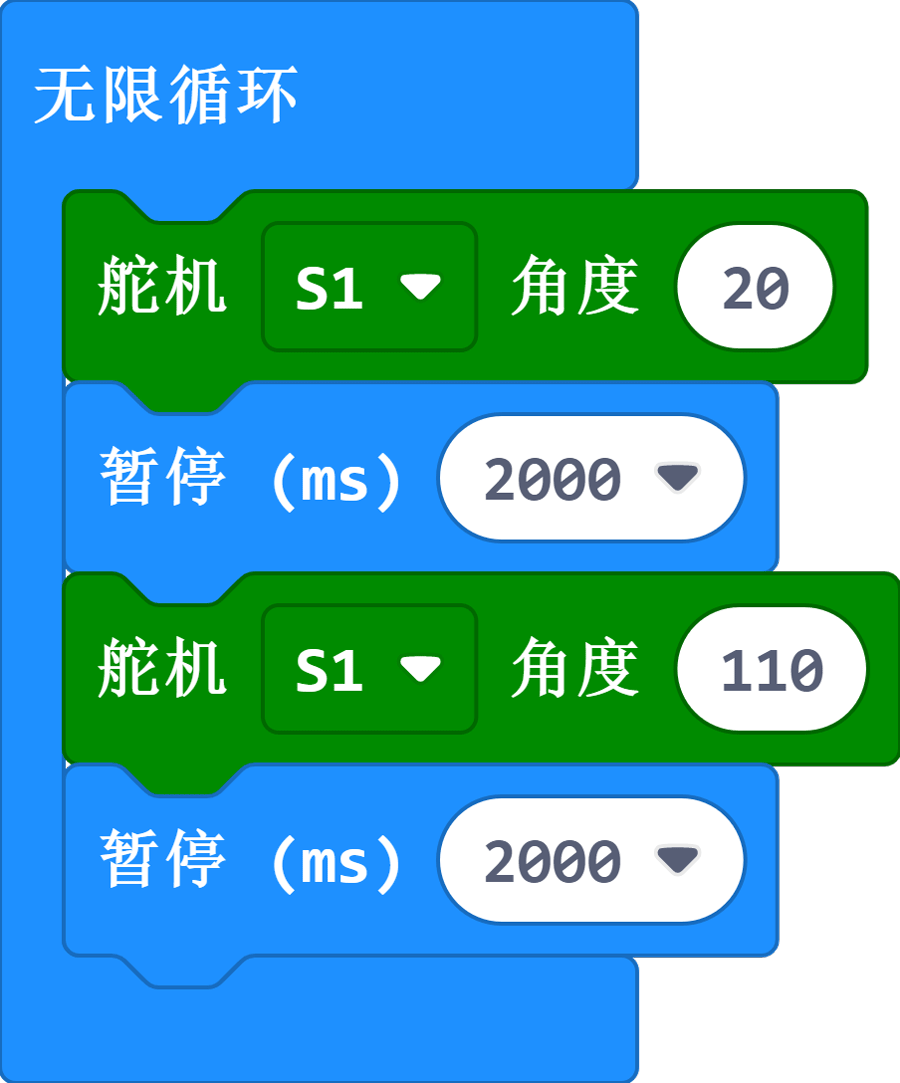
9.14.2.2 程序执行结果
打开麦昆的电源开关,铲子就会上下不停的按90 度的角度转动。
如果发现转动的起始角度和终止角度不合适,有两种方法可以调节:①调节程序内的角度值,让铲子转动的角度满足你的需求。②拧下舵机上的两颗螺丝,用手转动舵机连接盘,觉得合适后,再拧上螺丝。
9.14.3 红外遥控铲子
本节将使用红外遥控器来遥控铲子的上下转动,进一步学习装载机的实际控制方法。前面已经学习过红外遥控器的使用方法,这里就不赘述了。
9.14.3.1 编辑程序
以下程序实现的功能为:用红外线遥控器来控制铲子的角度。
程序链接:https://makecode.microbit.org/_CFMhwL03TK5q
程序文件:
程序截图:
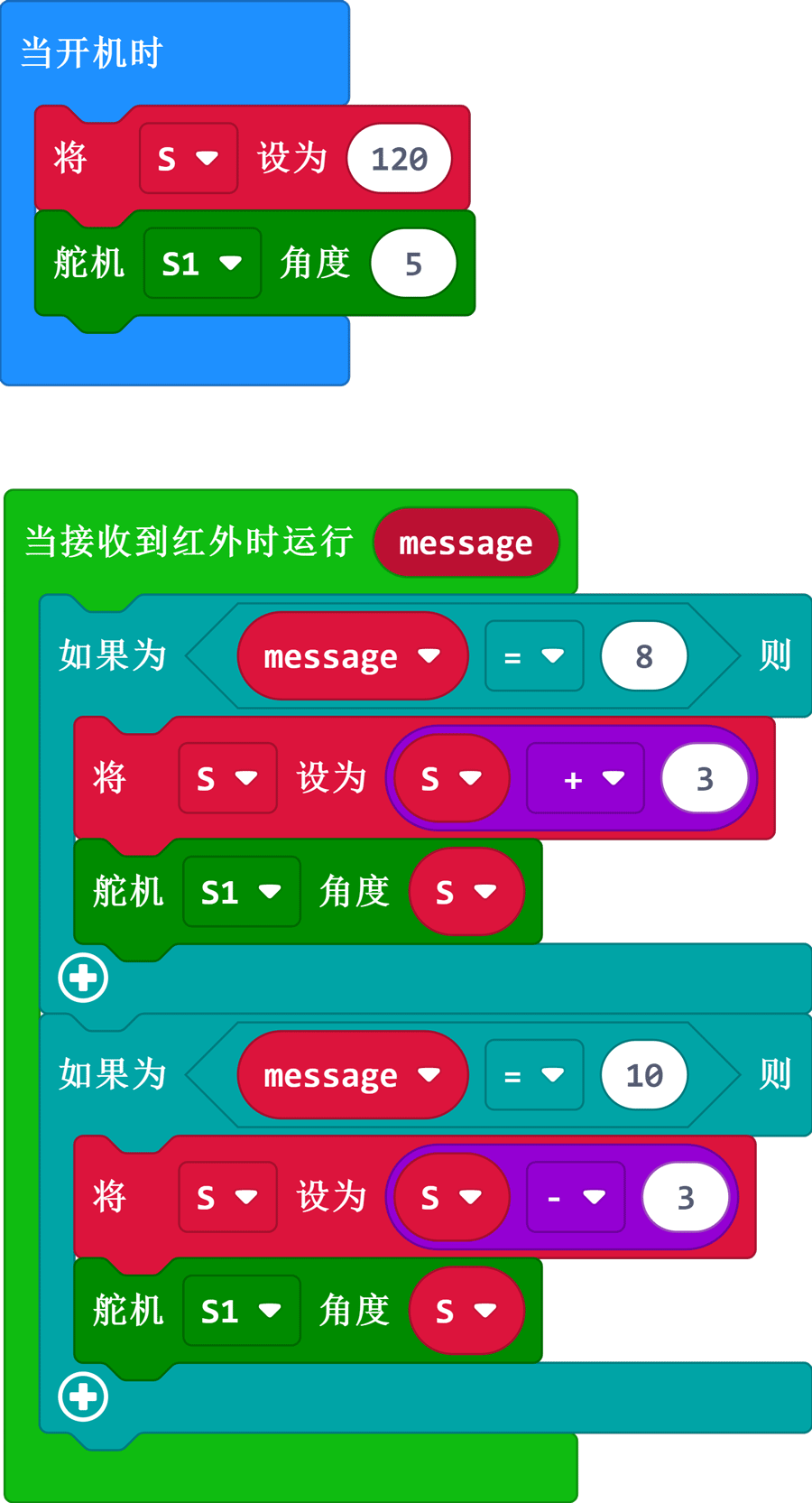
9.14.3.2 程序执行结果
使用红外遥控器对着麦昆前面的红外接收器,分别按住上三角和下三角按键,铲子就会持续的转动。
9.14.4 红外遥控装载机
上面两节中单独地控制了铲子的运动,现在我们将铲子和小车结合起来使用。
9.14.4.1 编辑程序
以下程序实现的功能为:用红外遥控器控制麦昆的运动以及铲子的上下转动。
程序链接:https://makecode.microbit.org/_9EfhRHT71K09
程序文件:
程序截图:
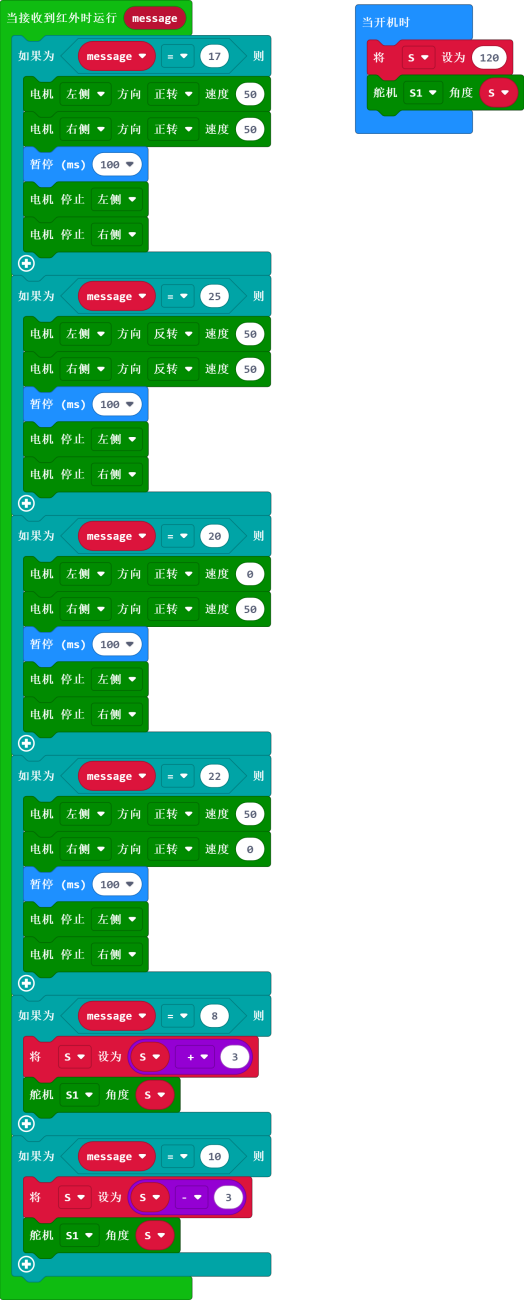
9.14.3.2 程序执行结果
按下红外遥控器的2、8、4、6、5 键可以分别控制麦昆的前进、后退、左转、右转、停止,按上三角键控制铲子的上抬,按下三角键控制铲子的下移。
11. 常见问题
问:给小车装上电池,车上的power灯能够亮起,烧录程序无法控制电机转动?
答:电池没电导致,建议更换电量充足的电池。电池电压低于2V时,板子上的LED及其他功能是可以正常工作的,但是电机会由于电量不足无法转动。
12. 更多资料下载
M023.01300-麦昆lite上手指南.pdf
