什么是Platform IO?使用Platform IO有什么好处?
Platform IO是一个开源的跨平台物联网开发生态系统,旨在简化嵌入式系统的开发流程。 它提供了一套全面的工具和框架,包括集成开发环境(IDE)、跨平台构建系统、库管理器和调试器等,使得开发更加简单、高效和可扩展。Platform IO支持多种硬件平台和开发板,如Arduino、ESP8266、ESP32、STM32等,兼容多种开发框架和微控制器。Platform IO相比Arduino IDE拥有更快的编译、上传代码速度,同时也可以使用VSCode丰富的插件来提高编码效率。
如何安装使用Platform IO
安装VSCode
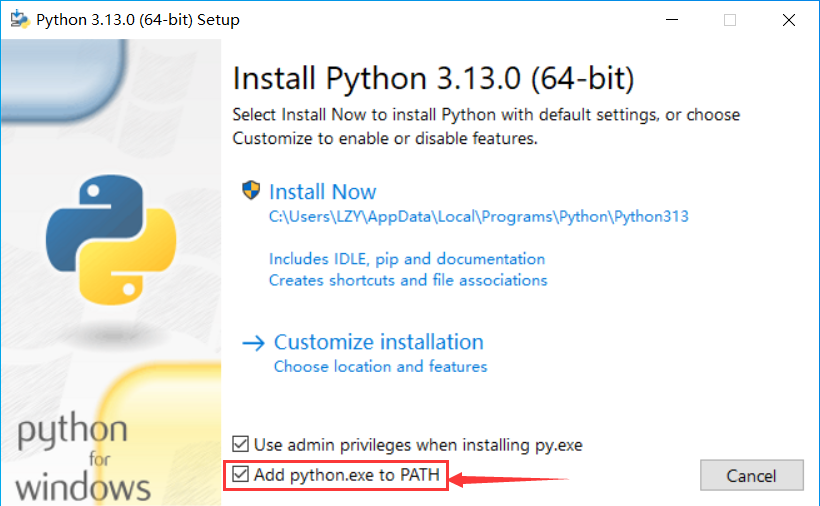
安装python
下载安装python
注意:安装时需要勾选添加路径
安装Platform IO插件
- 打开VSCode软件
- 点击"Extensions"按钮,在搜索框中搜索”PlatformIO”,然后点击"Install"安装
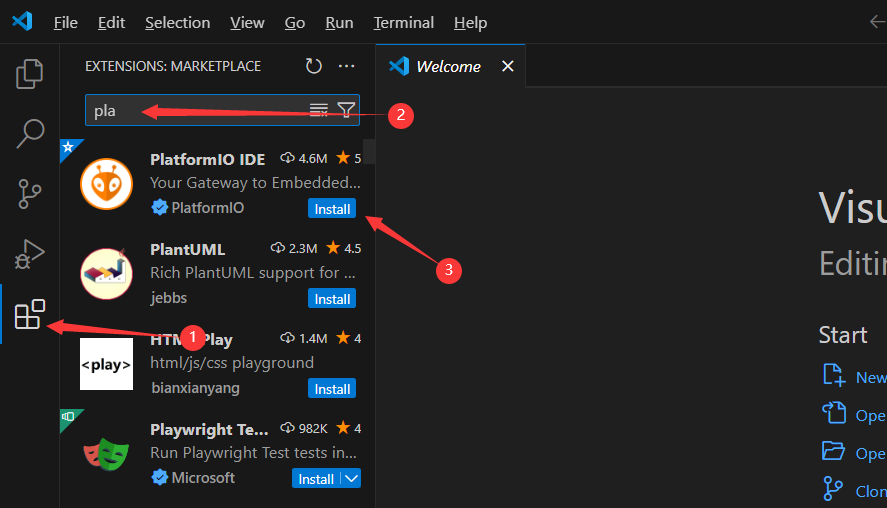
- 安装完成后重启VSCode
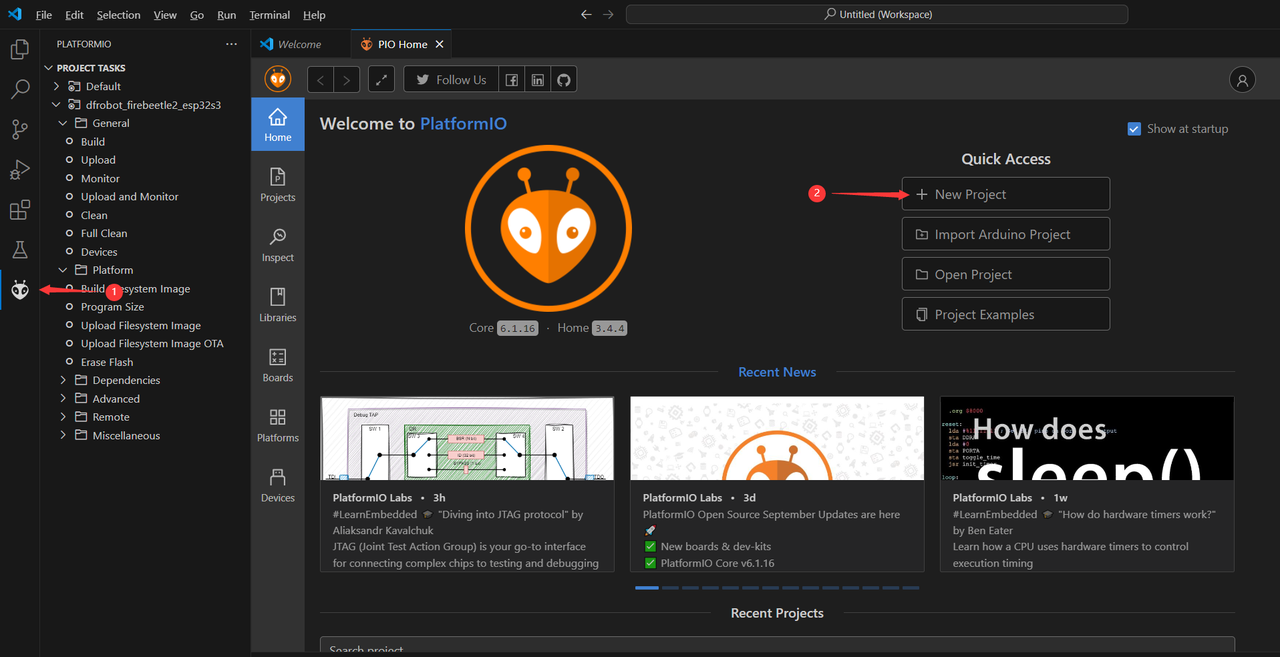
创建项目
-
点击"PlatformIO",然后点击"New Project"
-
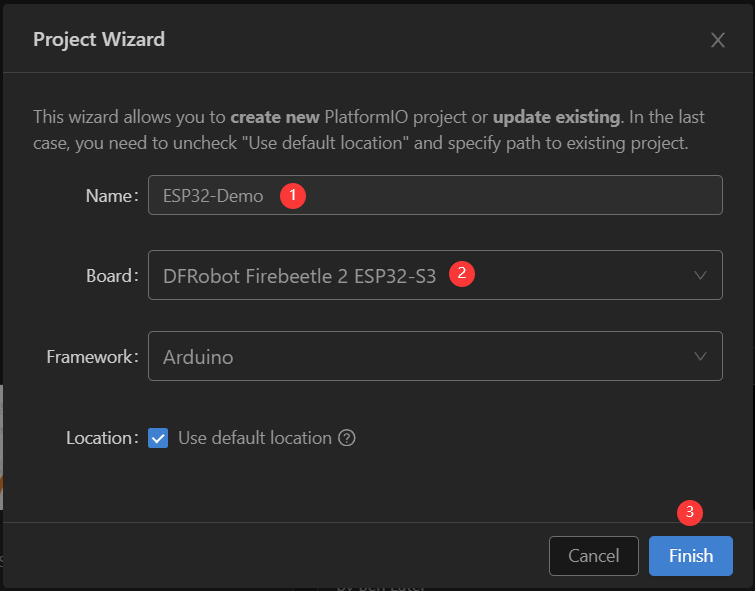
输入项目名称,搜索选择对应开发板,然后点击"Finish"
目前原生支持的板卡有:
Beetle ESP32-C3
Firebeetle 2 ESP32-E
Firebeetle 2 ESP32-S3
Firebeetle ESP32
注意:首次创建项目时需要下载环境,该过程非常缓慢,通常需要半小时以上
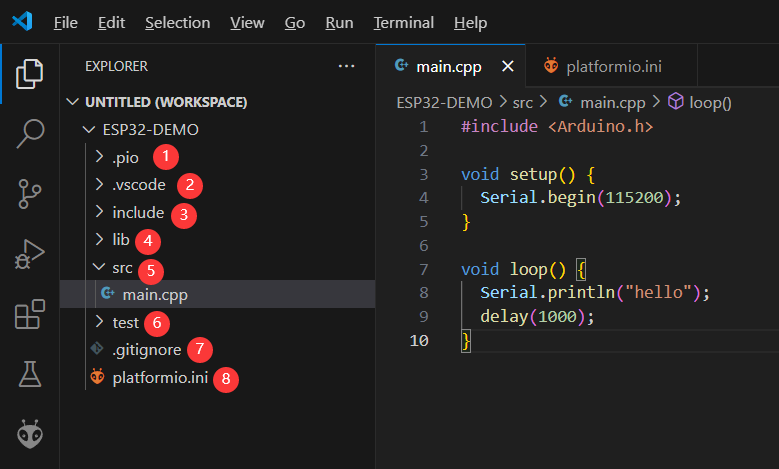
- 文件结构
- .pio:工程编译产生的文件
- .vscode:VSCode配置文件
- include:头文件
- lib:库文件
- src:源码文件
- test:测试文件
- .gitignore:git仓库文件
- platformio.ini:项目配置文件
编译上传项目
-
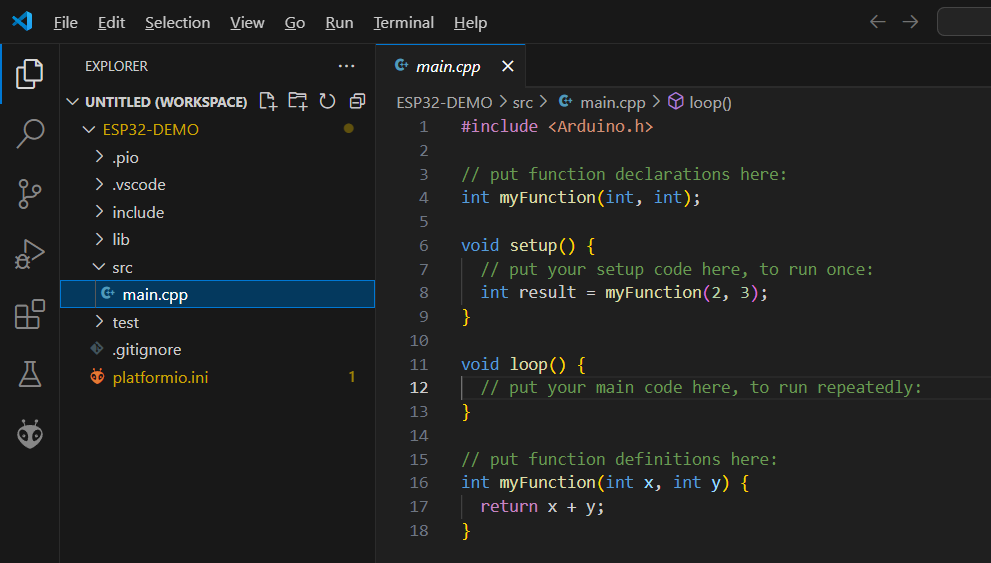
创建完成后在"src"文件中,即可找到main文件,即可编写代码
-
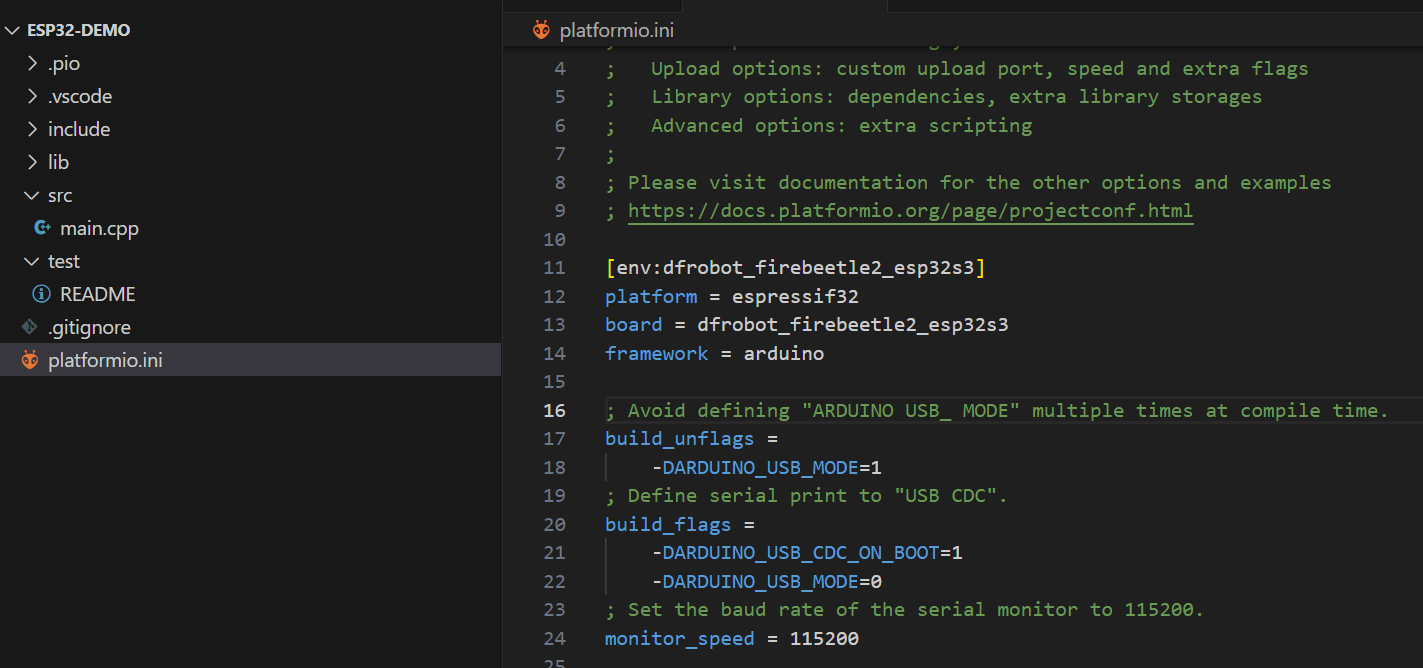
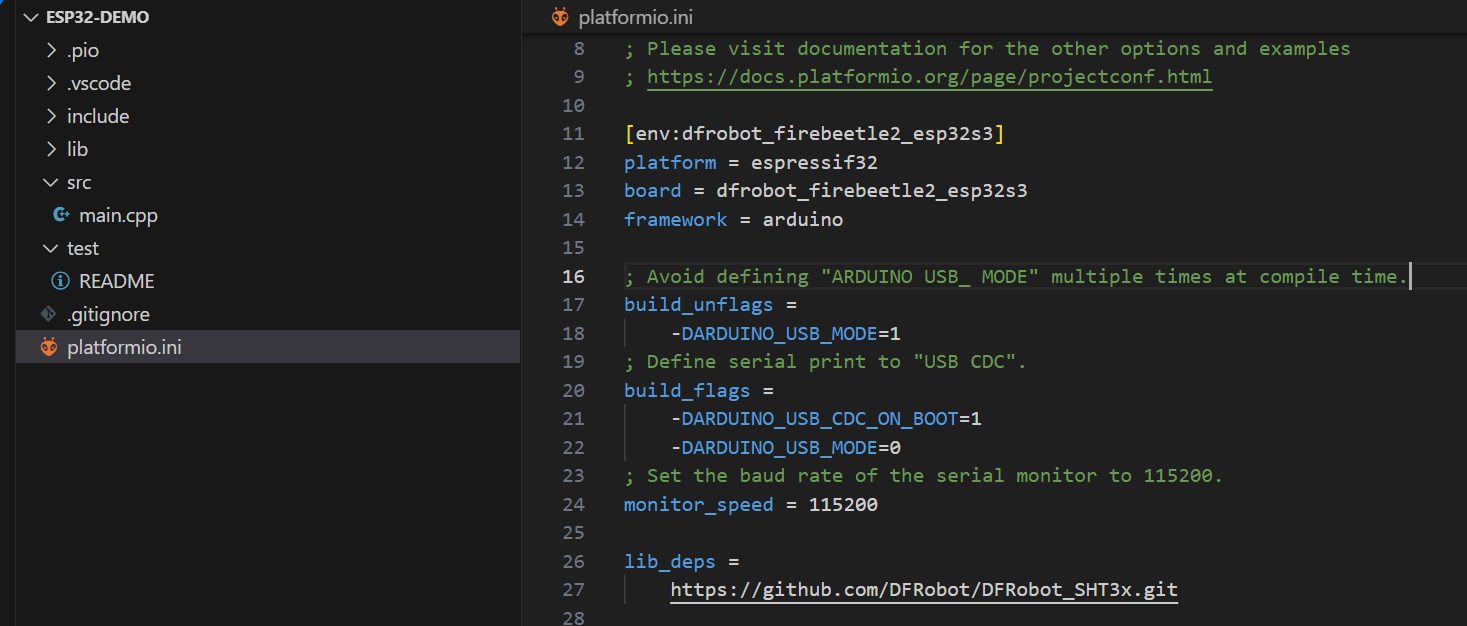
在编译上传代码前需要在platformio.ini文件中配置打印输出和串口波特率
; 避免编译时出现“ARDUINO_USB_MODE”重复定义。
build_unflags =
-DARDUINO_USB_MODE=1
; 将串口打印定义到“USB CDC”。
build_flags =
-DARDUINO_USB_CDC_ON_BOOT=1
-DARDUINO_USB_MODE=0
; 将串口监视器波特率设置为115200。
monitor_speed = 115200
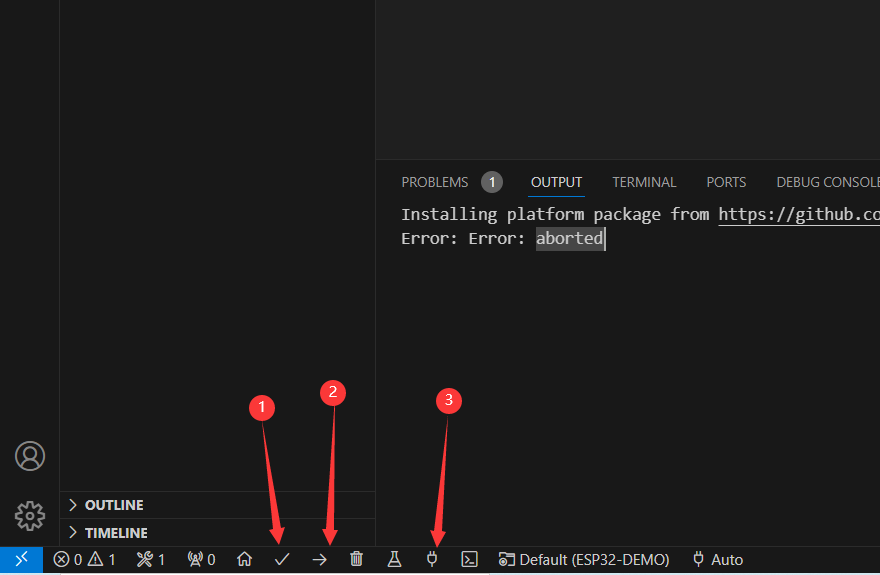
- 完成代码后即可编译上传
- 1:编译项目
- 2:上传代码
- 3:打开串口监视器
-
编译

-
上传
-
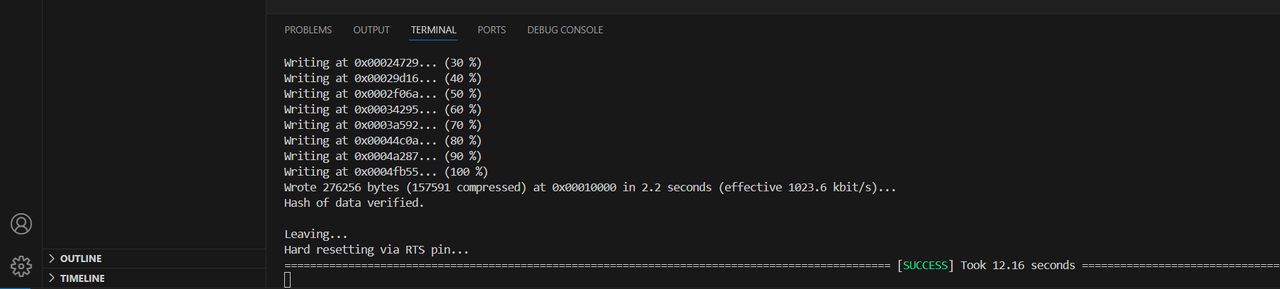
上传代码后,点击串口监视器按钮,复位开发板,即可看到串口打印

添加库文件
- 在platformio.ini文件中添加下面代码并保存(网址链接更换为需要添加库的链接)
lib_deps =
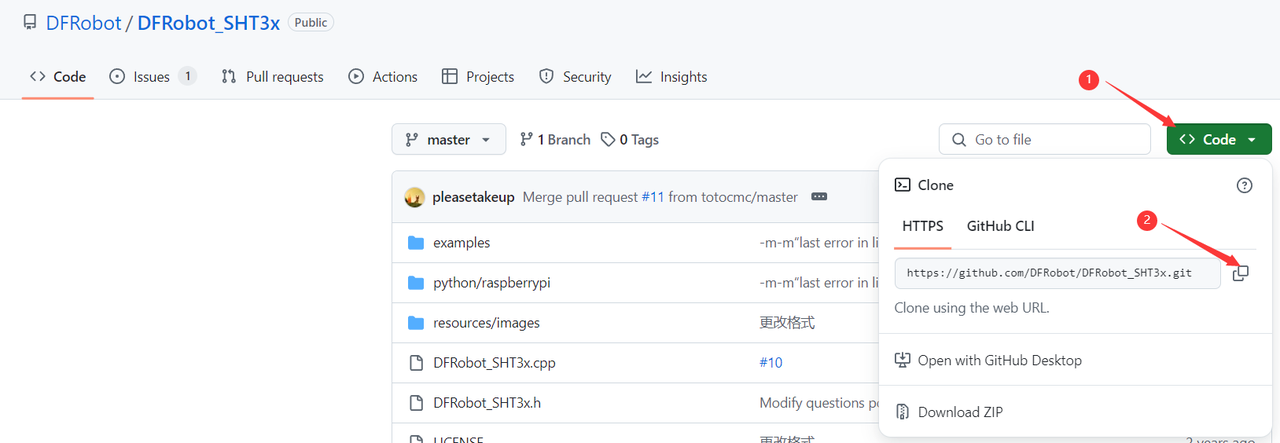
https://github.com/DFRobot/DFRobot_SHT3x.git
git链接可在库文件中找到:https://github.com/DFRobot/DFRobot_SHT3x
- 回到main.cpp文件中即可使用该库(下载完成的库文件在.pio->libdeps下)
