行空板无人驾驶套件
1. 产品简介
行空板无人驾驶套件是一款专为课堂教学设计的综合教学套件,本套件,提供了一套完整的硬件和软件解决方案,旨在帮助用户深入了解和探索无人驾驶技术。套件包括金属小车车体、高性能行空板主控、摄像头、音频模块、多路和单路巡线传感器、光线传感器、声音传感器、陀螺仪、金属夹持器、LED灯、USB小喇叭、巡线地图、AI视觉势识别卡片以及其他线材包和安装配件包。通过这些丰富的硬件资源和详细的课程指导,用户不仅可以进行安装体验,还能全面学习和掌握无人驾驶系统的核心技术。
行空板无人驾驶套件适用于初中、高中的学生。它不仅是学习和研究无人驾驶技术的理想工具,也是培养编程能力和系统设计能力的有效工具。

2. 产品清单
行空板无人驾驶套件中包含多种传感器,这些传感器涵盖了从视觉、听觉到运动感知等多个方面。并配备专用超大地图,和多款AI视觉识别卡纸,为用户提供了全面的学习资源。

3. 行空板无人驾驶套件教学资源
3.1 课程介绍
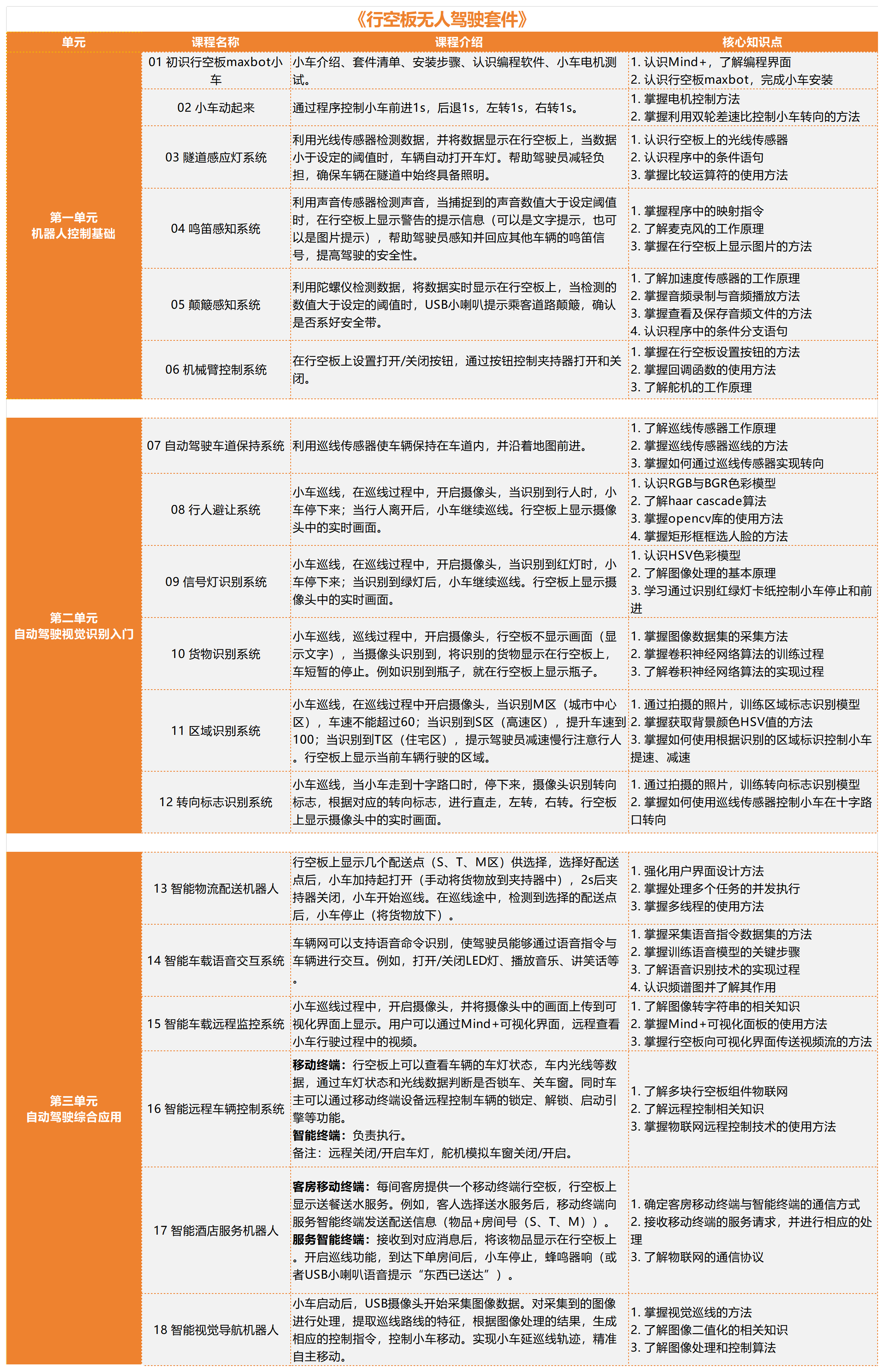
本课程旨在通过行空板maxbot小车和相关的传感器、编程技术的实际应用,培养学生在无人驾驶技术、自动驾驶视觉识别以及综合应用等方面的能力。课程分为三个单元,涵盖从基础机器人控制到自动驾驶的高级应用,通过动手实践,提升学生的编程能力和理解无人驾驶系统的核心技术。
第一单元:机器人控制基础
本单元主要介绍行空板maxbot小车的基础控制,包括小车安装、编程软件的使用,以及电机控制、舵机控制等基础知识。通过系列项目,学生将掌握光线传感器、声音传感器、陀螺仪传感器等在实际应用中的操作和数据处理方法。
- **01 初识行空板maxbot小车:**了解小车的基本构造、安装步骤和编程软件。
- **02 小车动起来:**通过编程实现小车的基本运动控制。
- **03 隧道感应灯系统:**使用光线传感器自动控制车灯,确保隧道内的照明。
- **04 鸣笛感知系统:**利用声音传感器检测鸣笛信号,提高驾驶安全性。
- **05 颠簸感知系统:**通过陀螺仪检测颠簸,提示乘客系好安全带。
- **06 机械臂控制系统:**学习通过按钮和舵机控制夹持器的开闭。
第二单元:自动驾驶视觉识别入门
本单元引导学生探索自动驾驶中的视觉识别技术,学习使用摄像头和各种算法实现车道保持、行人避让、信号灯识别、转向标志识别等功能。学生将掌握基本的图像处理技术和机器学习算法在自动驾驶中的应用。
- **07 自动驾驶车道保持系统:**利用巡线传感器保持车辆在车道内行驶。
- **08 行人避让系统:**通过摄像头识别行人并实现自动避让。
- **09 信号灯识别系统:**识别交通信号灯并根据信号控制小车行驶。
- **10 货物识别系统:**使用卷积神经网络算法识别货物并显示识别结果。
- **11 区域识别系统:**根据区域识别结果动态调整车速。
- **12 转向标志识别系统:**通过摄像头识别转向标志并控制小车在十字路口转向。
第三单元:自动驾驶综合应用
本单元综合运用前两个单元的知识,进行更为复杂的无人驾驶系统设计与实现。学生将学习智能物流配送、语音交互、远程监控与远程控制等高级应用,掌握多线程编程、物联网通信等先进技术。
- **13 智能物流配送机器人:**设计一个能够自动配送货物的小车系统。
- **14 智能车载语音交互系统:**实现小车的语音控制功能。
- **15 智能车载远程监控系统:**通过摄像头实时监控小车行驶过程。
- **16 智能远程车辆控制系统:**实现车辆的远程锁定、解锁、启动等功能。
- **17 智能酒店服务机器人:**设计一个用于酒店客房服务的机器人系统。
- **18 智能视觉导航机器人:**通过图像处理实现小车的自主巡线导航。
通过本课程,学生不仅能够掌握无人驾驶技术的基础知识和实践技能,还能深入理解自动驾驶技术的核心原理。
3.2 课程大纲
{kind=link}
3.3 课程资源
3.3.1 组装教程
组装教程文档:
组装教程视频:
3.3.2 课程样章
| 序号 | 课程目录 | 项目图片 |
|---|---|---|
| 01 | 初始行空板maxbot小车 | |
| 02 | 小车动起来 | |
| 03 | 隧道感应灯 | |
| 04 | 鸣笛感知系统 | |
| 05 | 颠簸感知系统 | |
| 06 | 机械臂控制系统 | |
| 07 | 自动驾驶车道保持系统 | |
| 08 | 行人避让系统 | |
| 09 | 信号灯识别系统 | |
| 10 | 货物识别系统 | |
| 11 | 区域识别系统 | |
| 12 | 转向标志识别系统 | |
| 13 | 智能物流配送机器人 | |
| 14 | 智能车载语音交互系统 | |
| 15 | 智能车载远程监控系统 | |
| 16 | 智能远程车辆控制系统 | |
| 17 | 智能酒店服务机器人 | |
| 18 | 智能视觉导航机器人 |
4. 使用说明
这套课程中,行空板使用的是专用固件,因此我们首先需要确认系统版本是否正确。查看方法如下:长按行空板“home”键,选择“6-查看系统系统”,查看当前系统版本是否为v0.3.5-0175_02,若一致,则说明固件设置正确!

特别提示:如果你购买的是行空板Maxbot无人驾驶套件,那么出厂时系统固件已经更新为指定版本,通常无需手动更新。但如果你在“查看系统信息”时发现版本不一致或显示异常,可以进行专用固件更新。
4.1工具准备
- 镜像烧录工具 UNIHIKER Batch Tool

注:烧录工具升级为批量烧录工具,可一次给10块行空板同时烧录系统镜像,当前仅提供windows版本。
| 下载方式 | windows版 | mac版 | Linux版 |
|---|---|---|---|
| 腾讯微云网盘下载(推荐): | 点击下载 | / | / |
| 百度网盘下载: | 点击跳转(提取码:unih) | / | / |
| 阿里云盘下载: | 点击跳转(提取码:v3y2) | / | / |
- 镜像文件

镜像文件下载:https://pan.baidu.com/s/1SyBcVIe5WSMIZCNP5RIgwg?pwd=npnv 提取码: npnv
4.2 镜像文件烧录方法
点击查看操作步骤。
注:链接中的3-操作步骤,是详细的镜像烧录方法。
注意事项:如果你购买了本产品,可通过下面的方式获取完整的教程电子资源
- 添加产品售后服务QQ(2124609059),发送产品信息,包括产品名称和实物图,获取完整教程;