产品简介
电机控制从未如此简单!N20微型金属电机系列是您项目不可或缺的利器。相较传统电机,我们采用了PWM舵机控制方式,从而根本性地简化了接线和编程难度。
一般电机需要额外购买驱动模块,增加了项目成本,更要面对复杂繁琐的接线和编程,因为常规电机通常不携带驱动芯片,需连接至少4个端口才能正常控制。我们的产品在电机尾部巧妙地集成了驱动芯片,并采用舵机的控制方式,仅需一个PWM端口,即可轻松掌控电机的速度和方向,不仅省去了接线烦恼,更让编程变得轻而易举。
此外,我们深度优化了性能,特别是通过增大停止点脉宽,成功将待机功耗降至小于1mA,无需控制信号时的电流消耗微乎其微。
为迎合不同应用场景,我们提供多种减速比和输出转速的电机选择。下表详细列示了各款电机的性能参数,让您更便捷地选型。
集成驱动N20系列电机参数表
| SKU | DFR1114 | DFR0399 | DFR0429 | DFR0430 |
|---|---|---|---|---|
| 电机及减速箱参数 | ||||
| 电机转速(未减速) | 20000 | 220000 | 220000 | 220000 |
| 齿轮箱减速比 | 1:150 | 1:75 | 1:50 | 1:30 |
| 空载输出转速 | 133 | 290 | 440 | 730 |
| 堵转力矩 | 1.0kg*cm | 0.8kg*cm | 0.5kg*cm | 0.3kg*cm |
| 电源参数 | ||||
| 工作电压 | 3-6V | 3-6V | 3-6V | 3-6V |
| 额定电压 | 6V | 6V | 6V | 6V |
| 空载电流 | 50mA | 70mA | 70mA | 70mA |
| 堵转电流 | 640mA | 1000mA | 1000mA | 1000mA |
| 静态电流 | <1mA | <1mA | <1mA | <1mA |
| 控制参数 | ||||
| PWM频率 | 500Hz | 500Hz | 500Hz | 500Hz |
| 信号分辨率 | 1us | 1us | 1us | 1us |
| 正转脉冲范围 | 500-1400us | 500-1400us | 500-1400us | 500-1400us |
| 停止点脉宽范围 | 1400-1600us | 1400-1600us | 1400-1600us | 1400-1600us |
| 反转脉冲范围 | 1600us-2500us | 1600us-2500us | 1600us-2500us | 1600us-2500us |
| 其它参数 | ||||
| 重量 | 10g | 10g | 10g | 10g |
| 尺寸(mm) | 40×12×20 | 40×12×20 | 40×12×20 | 40×12×20 |
产品特性
- 全金属N20电机,体积小巧,质量可靠
- 集成驱动芯片,360度舵机驱动方式,使用简单
- PH2.0-3P接口,Gravity线序标准,接插方便
应用场景
- 机器人小车
- 机械运动控制
- 阀门控制
- 门锁控制
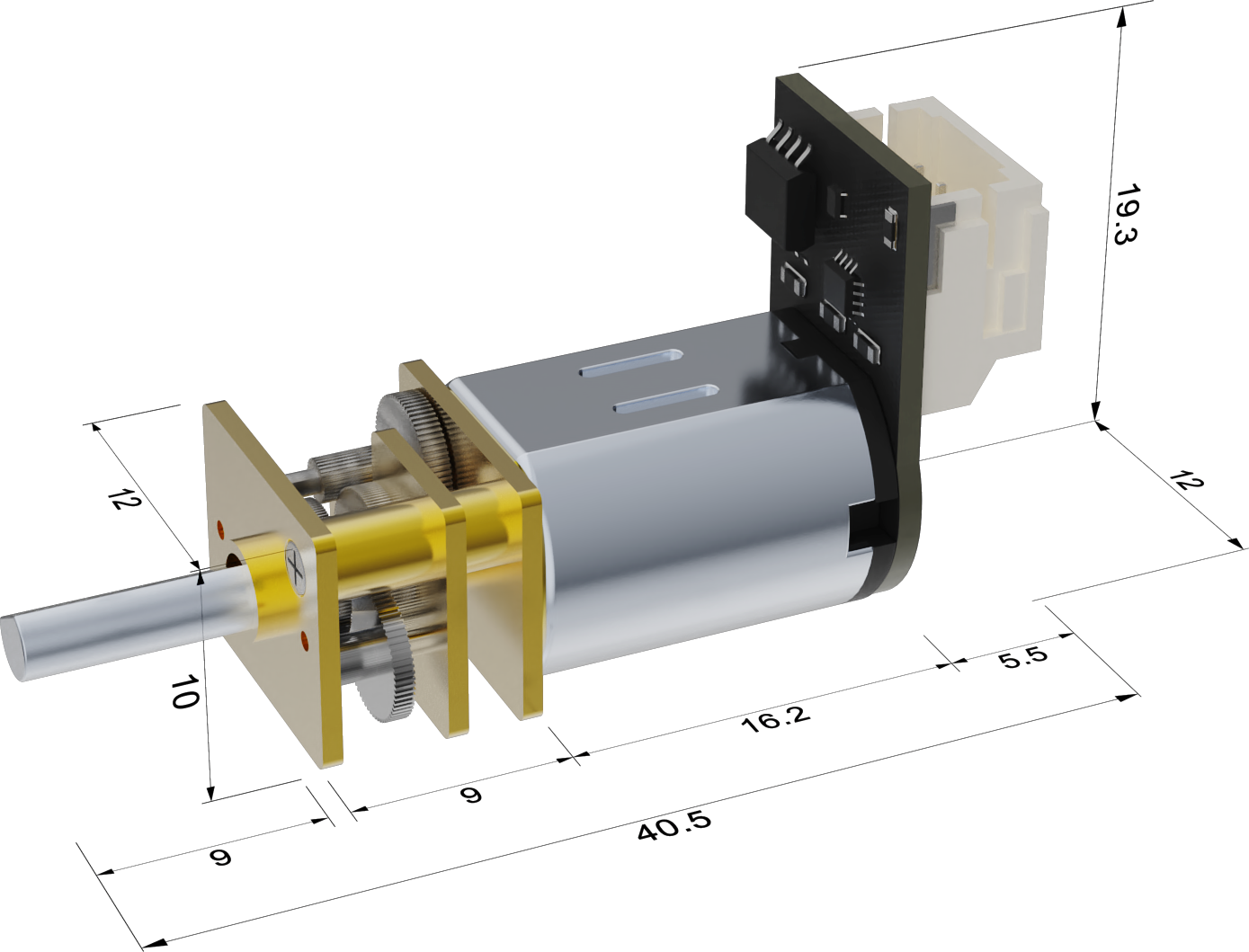
产品尺寸图(单位:mm)
技术规格
电源参数
- 工作电压范围:3V-6V
- 额定电压:6V
- 空载电流:50mA(6V状态下)
- 静态电流:<1mA (无PWM控制信号输入)
- 堵转电流:640mA
电机参数
- 电机转速(未减速):20000转
- 齿轮箱减速比:150:1
- 空载输出转速:133转
- 堵转力矩:1.0kg*cm
控制参数
- PPM信号分辨率:1us
- PPM信号正脉宽范围:500us-2500us
- 正转脉宽范围:500us-1400us (500us转速最大)
- 停止点脉宽范围:1400us-1600us
- 反转脉宽范围:1600us-2500us(2500us转速最大)
- PWM驱动频率:500 Hz
其它参数
- 重量:10g
- 尺寸:长40mm×宽12mm×高20mm
使用教程
准备
- 硬件
- DFRduino UNO R3 x1
- DFR1114 集成驱动N20电机 x1
- 杜邦线 若干
- USB线缆 x1
- 软件
- Arduino IDE: 点击下载Arduino IDE
- 舵机库文件:Arduino Servo library(如Arduino IDE已内置,则无需额外下载) 。如何安装库?
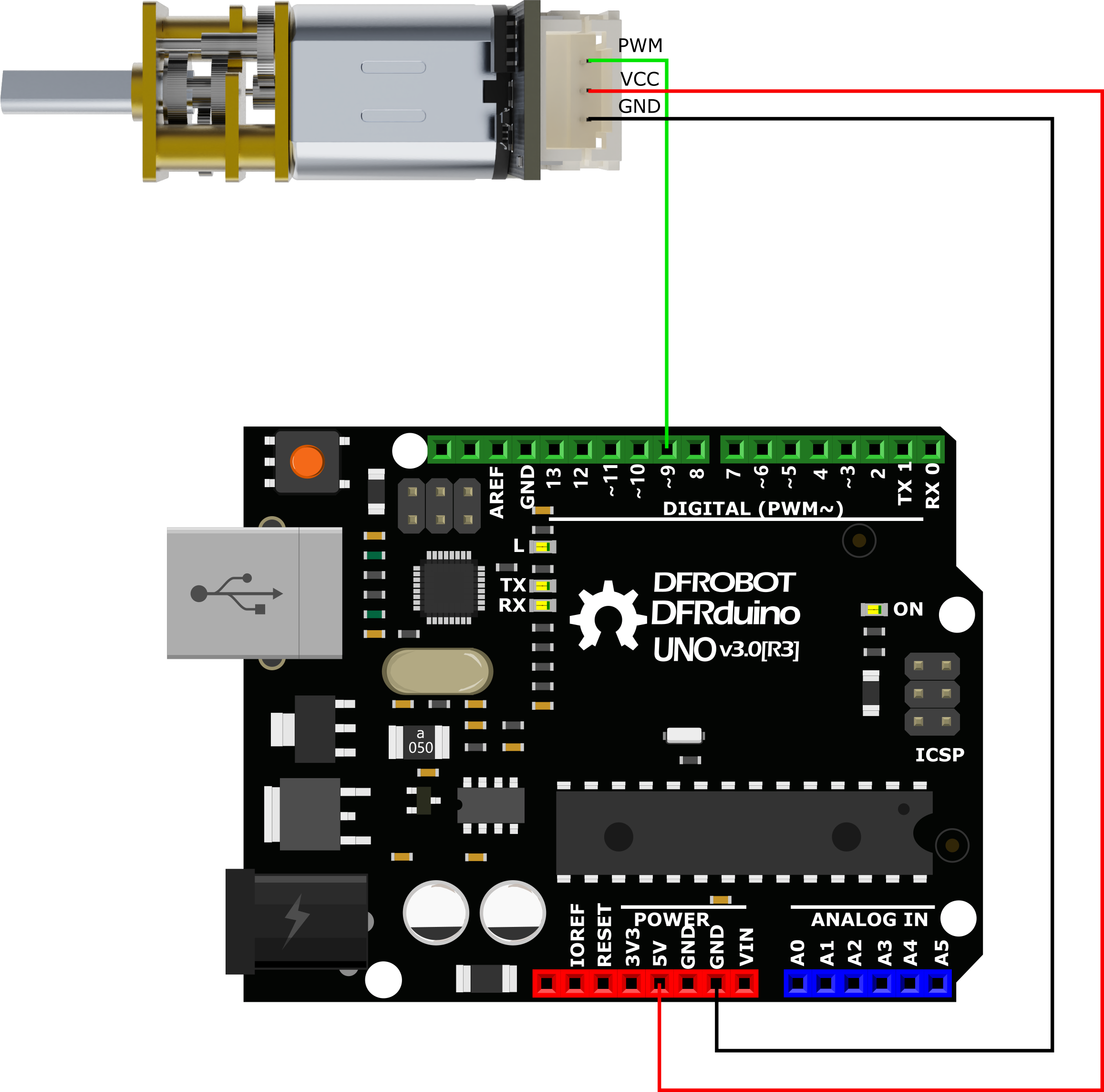
接线图
示例代码
以下代码采用180度舵机驱动方式对N20电机进行控制,程序功能如下:
- 程序运行时暂停1秒
- 电机按最快速度正转2秒
- 电机按最快速度反转2秒
- 正转速度逐渐减慢至停止再到反转速度从慢到快变化
以上逻辑无限循环
#include <Servo.h>
#define speed_maxP 0 //极速正转(对应180度舵机 0°控制信号)
#define speed_maxN 180 //极速反转(对应180度舵机180°控制信号)
#define speed_stop 90 //停止 (对应180度舵机 90°控制信号)
Servo mymotor; // 创建一个Servo 对象 mymotor 用于控制舵机
int pos = 0;
void setup()
{
mymotor.attach(9); //配置控制信号输出口为D9
}
void loop()
{
/**********使用180度舵机控制信号控制N20电机******************************/
mymotor.write(speed_stop); //停止
delay(1000); //延时1S
mymotor.write(speed_maxP); //极速正转
delay(2000); //延时2S
mymotor.write(speed_maxN); //极速反转
delay(2000); //延时2S
for (pos = speed_maxP; pos < speed_maxN; pos++) //正转速度减慢至停止再到反转速度从慢到快变化
{
mymotor.write(pos);
delay(50);
}
}
结果说明:
- 0~180°对应了控制信号的脉冲宽度在500us-2500us之间;
- 当我们给一个中间值81~99°(1400-1600us)时,电机停止;
- 当我们给一个值小于81°(1400us)时,电机正转,数值越小,速度越快,0°(500us)为最大速度;
- 当我们给一个值大于99°(1600us)时,电机反转,数值越大,速度越大,180°(2500us)为最大速度;
- 由于每个电机个体会存在差异,所以每个停止位都有所区别,我们特别增大了它的停止域,来确保电机能够正确停止。