
序号 o10
SKU号 BOS0025
中文名称 舵机控制模块
英文名称 Boson:Servo Controller Module
概述
舵机控制模块是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。舵机控制模块可以接收数字信号或模拟信号,分别对应了swing模式和turn模式,然后产生舵机的PPM控制信号,使得舵机来回摆动或者旋转到设定角度静止。舵机控制模块中预设了2种不同的控制机制,可以通过开关进行切换,在非编程模式下自由玩转各种进阶功能。它可以与arduino 、micro:bit等主控器搭配使用。它不仅支持mind+和makecode图形化编程,还支持免编程的功能。
产品参数
- 工作电压:3.3V-5V
- 工作电流:TBD
- 舵机类型:180°舵机
- 接口方式:PH2.0-3P
- 模块尺寸:26mm×39mm
引脚说明

| 标号 | 名称 | 功能描述 |
|---|---|---|
| 1 | SIGNAL | 数字信号线 |
| 2 | VCC | 电源正极 |
| 3 | GND | 电源负极 |
| 4 | 信号 | 舵机控制信号输出 |
| 5 | VCC | 舵机电源正极 |
| 6 | GND | 舵机电源负极 |
| 7 | 电位器 | 舵机摆动频率控制 |
| 8 | 拨动开关 | 舵机模式选择 |
使用说明
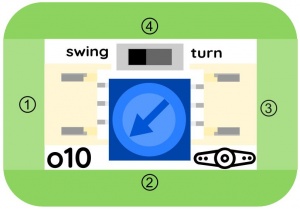
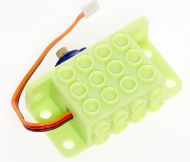
图示 1 是舵机控制模块控制信号及供电的输入接口。
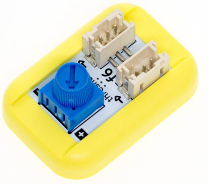
图示 2 的电位器是控制舵机摆动频率。
图示 3 是舵机的接口。
图示 4 是拨动开关选择,舵机控制模块提供了2种预设控制模式,分别为swing和turn。
- swing:在设定角度和初始角度来回摆动
- turn:转到设定角度静止 (turn:转到设定角度静止)
这两种模式可以通过舵机控制模块上的拨动开关进行切换。
原理介绍
舵机控制模块主要是由外壳、电路板、驱动马达、减速器与位置检测元件所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的IC驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,由检测电阻值便可知转动的角度。
项目案例
1.控制舵机
项目介绍:
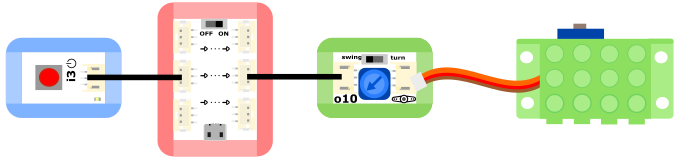
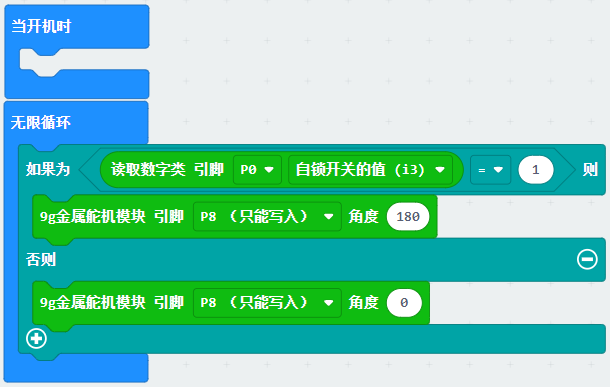
通过自锁开关控制舵机转动,第一次按下自锁开关,舵机转动到指定角度,第二次按下自锁开关,舵机转回初始角度。
元件清单:
 |
 |
 |
|---|---|---|
| BOS0003 自锁开关 | SER0045 9g金属舵机模块 | BOS0035 电源主板-三路 |
 |
 |
 |
| BOS0040 Micro:bit BOSON扩展板 | MBT0039 Micro:bit | BOS0025 舵机控制模块 |
Tips:microbit和Micro:bit BOSON扩展板在编程案例中使用。
免编程案例
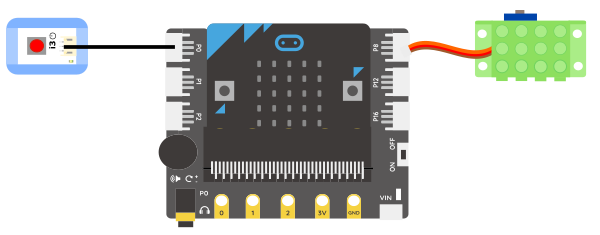
连线图:
编程案例
连线图:
程序流程图:

Mind+程序示例:

MackCode程序示例:
演示视频:
| 免编程案例 | 编程案例 |
|---|---|
 |
 |
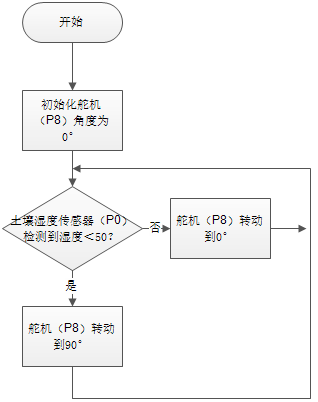
2.自动浇花装置
项目介绍:
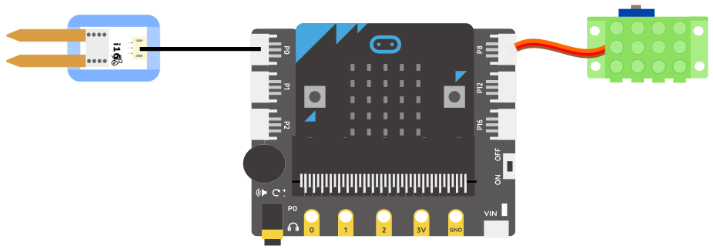
利用土壤湿度传感器实时监测花盆中土壤的含水量,当土壤缺水时,舵机带动软管口降低,达到自动浇水的目的。
元件清单:
 |
 |
 |
|---|---|---|
| BOS0038 土壤湿度传感器 | BOS0025 舵机控制模块 | SER0045 9g金属舵机模块 |
 |
 |
 |
| BOS0032 阈值模块 | MBT0039 Micro:bit | BOS0035 电源主板-三路 |
 |
||
| BOS0040 Micro:bit BOSON扩展板 |
Tips:microbit和Micro:bit BOSON扩展板在编程案例中使用。
免编程案例
连线图:

Tips:开关拨到turn.
编程案例
连线图:
程序流程图:
Mind+程序示例:

MackCode程序示例:

演示视频:
| 免编程视频 | 编程视频 |
|---|---|
 |
 |