简介
不少场合,需要电气隔离,才能保证传感器模块的可靠运行。有些传感器,比如pH传感器与电导率传感器,如果共用一个电源,在同一种容器中测量,就会相互干扰,不能正常工作。为保证传感器模块稳定可靠的运行,需要把信号与电源都隔离起来。
我们推出的这款Arduino兼容的模拟量隔离模块,能够隔离模拟信号,有效防止传感器之间的相互干扰;板载5V隔离电源,可直接提供给传感器模块使用,无需额外的电源,简单实用。连线接口专为DFRobot 3Pin模拟传感器设计,即插即用,无需焊接。模拟量变送比为1:1,因此把该模块串到电路中后,对传感器输出模拟量的影响非常小,所以主控板上的代码无需更改,简单方便。
使用这款模拟量隔离模块,可轻松解决传感器之间的相互干扰。如用于多合一水质检测系统,不用担心水质传感器之间相互干扰。
本产品几乎兼容DFRobot所有的模拟输出型传感器,加上DFRobot具有种类丰富的传感器,因此本产品可用于多种需要隔离的应用场合,满足您的多种需求。
⚠
- 本模块的MCU端(非隔离端),尽量提供5.0±0.1V的精确电压。输入电压精度越高,输出模拟量精度越高。
- 本模块工作时消耗电流较大,因此建议Arduino主控板外接电源,以提供足够的电源功率,也能保证电源电压精度,不至于电源电压明显降低。
- SEN端(隔离端)最大输出电流不得超过170mA,请注意负载的工作电流!
- MCU端(非隔离端)的GND与SEN端(隔离端)的GND是相互隔离的,严禁将其短接!
- 工作过程中,隔离电源模块会发热,属正常现象。
技术规格
- 工作电压:5.0V
- 响应时间:4秒(typ)
- 两端模拟量误差:<±20mV(typ)
- 接口类型:PH2.0-3P
- 空载电流:75mA(typ)
- 产品尺寸:42*32mm
- 非隔离端(接主控板)
- 供电电压:5.0±0.1V
- 模拟输出:0~5.0V
- 隔离端(接传感器)
- 输出电压:5.0±0.2V
- 模拟输入:0~5.0V
引脚说明

| 标号 | 名称 | 功能描述 |
|---|---|---|
| 1 | A | 模拟信号输出端(0~5.0V) |
| 2 | + | 电源输入正极(5±0.1V) |
| 3 | - | 电源输入负极 |
| 4 | - | 隔离电源输出负极 |
| 5 | + | 隔离电源输出正极(5.0±0.2V) |
| 6 | A | 模拟信号输入端(0~5.0V) |
接口说明
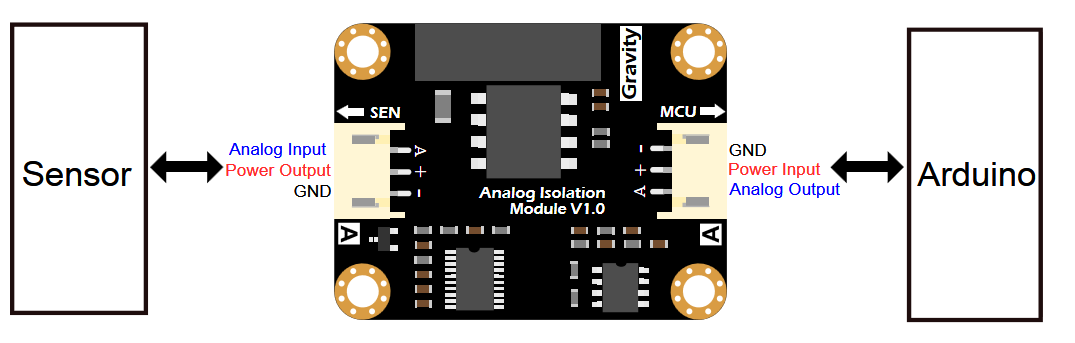
如下图所示,这款模拟量隔离模块有左边和右边两个接口。 左边接口,名称为SEN,和传感器模块连接; 右边接口,名称为MCU,和主控板连接。
使用教程
本教程以电导率传感器为例,演示如何把这个模拟量隔离模块接入电路中,对传感器模块进行电气隔离。 电导率传感器会向液体里释放高频电信号,因此,如果同一容器里的溶液中还有其他水质传感器,如pH传感器,就会受到严重干扰。因此需要将这个电导率传感器进行电气隔离。
准备
- 硬件
- 1 x Arduino UNO控制板(或类似的主控板)
- 1 x 传感器模块(本教程以电导率传感器模块为例)
- 1 x PH2.0-3P模拟线
- 1 x 双头PH2.0排线
- 1 x 模拟量隔离模块
接线图
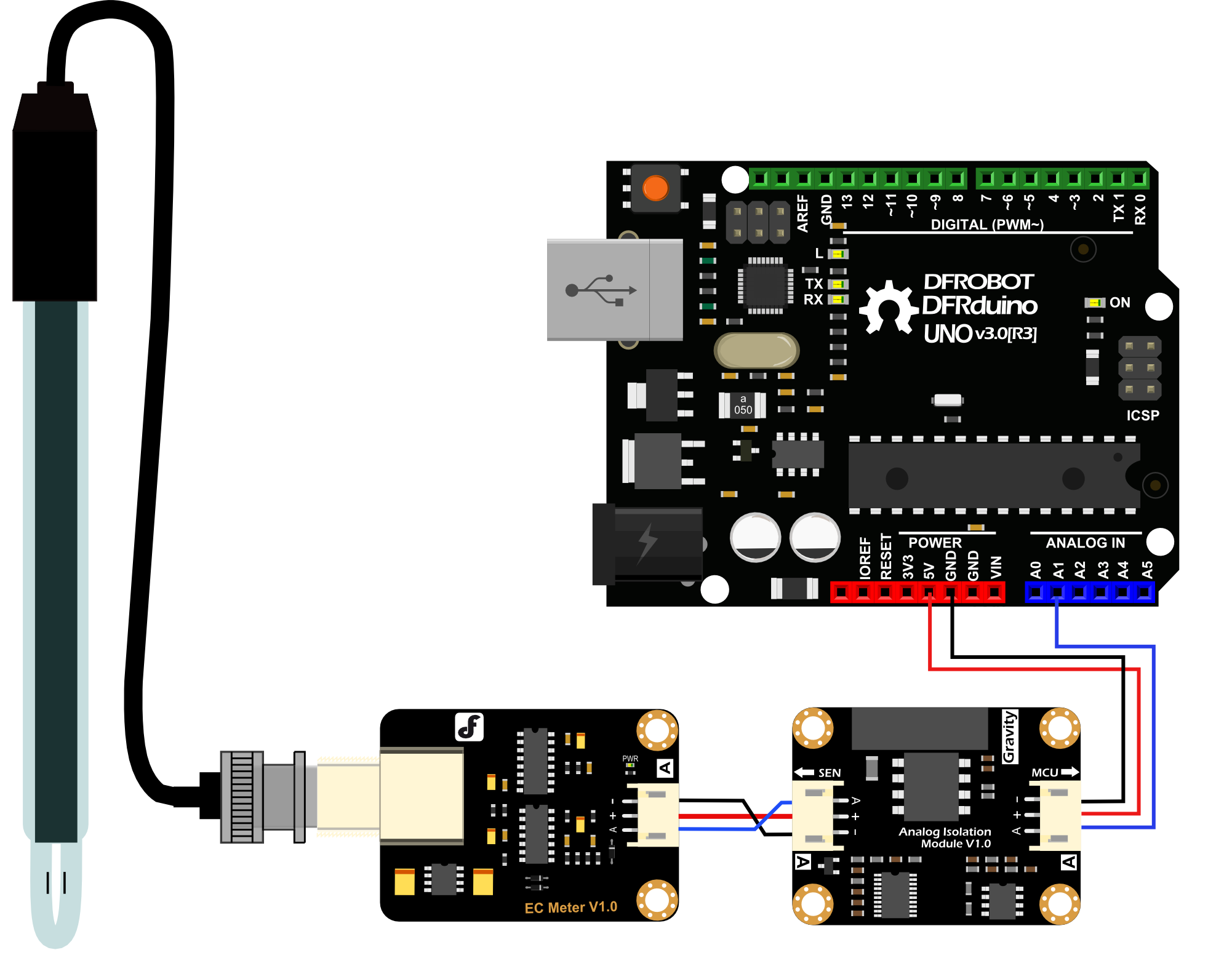
如下图所示,将传感器模块连接到隔离模块的SEN端(实际连接时请使用双头PH2.0排线,该排线随产品附赠)。然后将隔离模块的MCU端连接到Arduino主控板。这就完成了电导率传感器的电气隔离。
常见问题
还没有客户对此产品有任何问题,欢迎通过qq或者论坛联系我们!
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。
