概述
Romeo for Education MainBoard,受益Arduino开源平台,因此受到成千上万的开放源码的支持,并可以很容易地扩展arduino模块。
集成2路直流电动机驱动器和无线插座,给出了一个更简单容易的方式开始你的机器人项目。
性能描述
- Atmega 328
- 14 通道数字 I/O
- 6 PWM 通道 (Pin11,Pin10,Pin9,Pin6,Pin5,Pin3)
- 8通道10位模拟I / O
- USB接口
- 自动切换输入电源
- ICSP下载程序接口
- 串行接口TTL电平
- 具有排母和排针接口
- 支持外接 BLE LINK 蓝牙4.0通讯模块
- 具有3个I2C接口
- 具有1个超声波接口
- 2个直流电机驱动器
- 直流电源:USB供电或外部锂电池(3.7V)直流或外部干电池(4.5V供电)。
- DC输出:5V/3.3V直流外接电源输出
- 尺寸:80x65mm
电路原理图

主板BOM清单

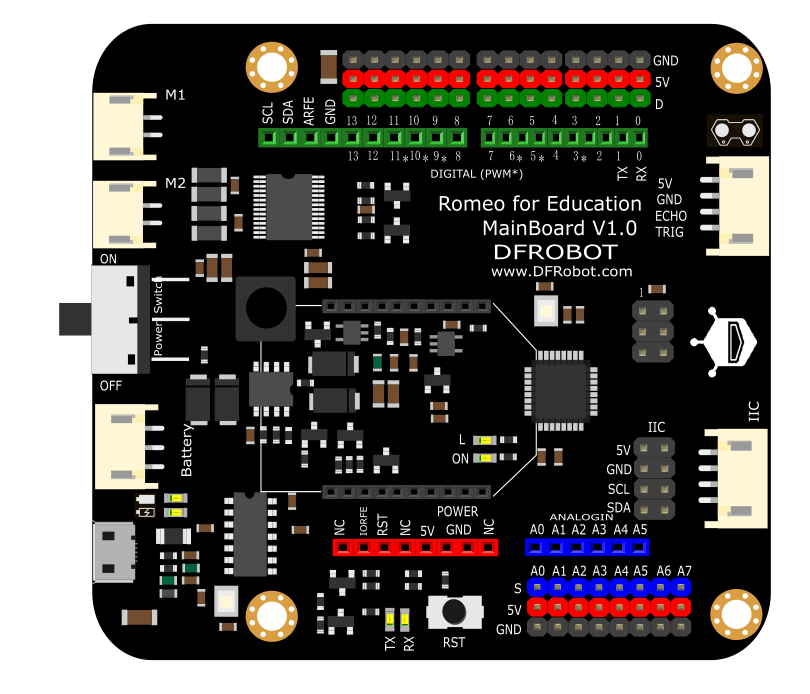
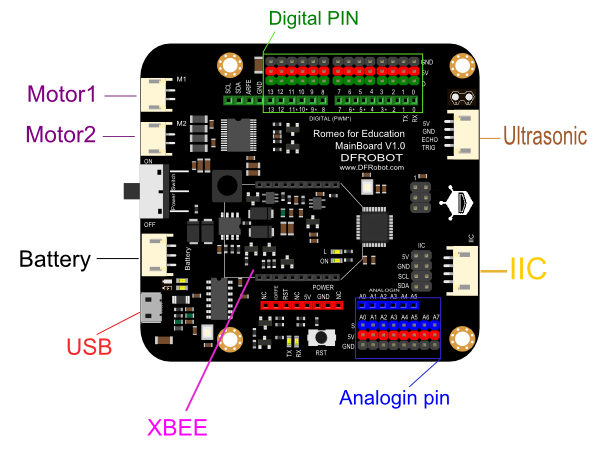
管脚定义
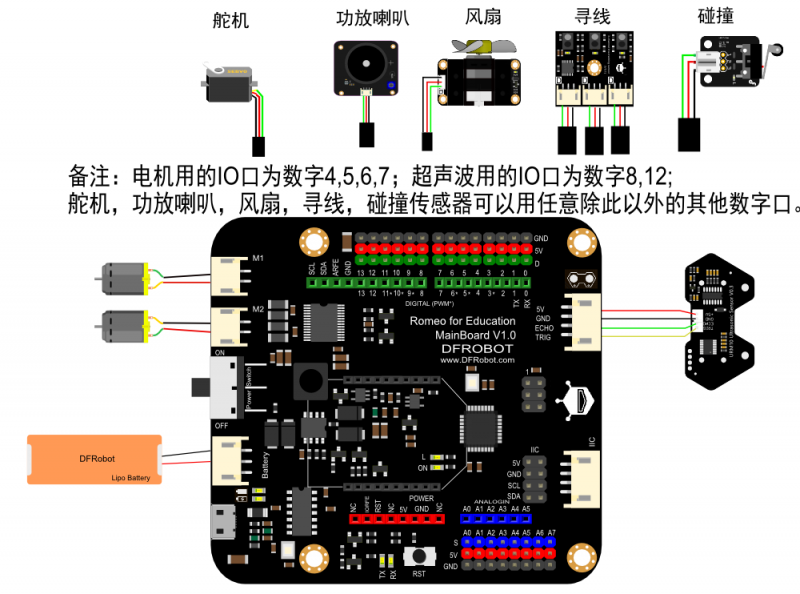
连线图
软件及开源说明
RoMeo控制器可以使用编程环境Arduino IDE 0022及以上。
您可以在Arduino.cc下载,请选择“硬件”的Arduino UNO“。
Romeo遵循Arduino官方开源说明
电机驱动例程
//Standard PWM DC control
int E1 = 5; //M1 Speed Control
int E2 = 6; //M2 Speed Control
int M1 = 4; //M1 Direction Control
int M2 = 7; //M1 Direction Control
void stop(void) //Stop
{
digitalWrite(E1,LOW);
digitalWrite(E2,LOW);
}
void advance(char a,char b) //Move forward
{
analogWrite (E1,a); //PWM Speed Control
digitalWrite(M1,HIGH);
analogWrite (E2,b);
digitalWrite(M2,HIGH);
}
void back_off (char a,char b) //Move backward
{
analogWrite (E1,a);
digitalWrite(M1,LOW);
analogWrite (E2,b);
digitalWrite(M2,LOW);
}
void turn_L (char a,char b) //Turn Left
{
analogWrite (E1,a);
digitalWrite(M1,LOW);
analogWrite (E2,b);
digitalWrite(M2,HIGH);
}
void turn_R (char a,char b) //Turn Right
{
analogWrite (E1,a);
digitalWrite(M1,HIGH);
analogWrite (E2,b);
digitalWrite(M2,LOW);
}
void setup(void)
{
int i;
for(i=4;i<=7;i++)
pinMode(i, OUTPUT);
}
void loop(void)
{
turn_L(100,100);
delay(1000);
advance(100,100);
delay(1000);
}