概述
TinkerNode Gravity IO扩展板是一款为TinkerNode物联网开发板系列量身打造的IO扩展板,它扩展了丰富的接口,让你方便地连接各类符合Gravity接口标准的模块,让你摆脱面包板繁杂的连线,项目搭建更加轻松优雅。此外,为了实现物联网场景下,电池供电系统经常遇到的低功耗设计问题,扩展板提供了2路电源控制,可通过数字IO打开或关闭连接在扩展板上外设的供电,让其只在需要的时候通电工作,以最小化系统功耗。
特性
- TinkerNode物联网开发板系列专用IO扩展
- Gravity标准接口,繁琐连线瞬间变得轻松简单
- 外设供电可动态控制,轻松实现系统低功耗
技术规格
- 丰富的接口扩展
- Gravity Analog 3P接口:2个
- Gravity Digital 3P接口:5个
- Gravity IIC 4P接口:3个
- Gravity UART 4P接口:1个
- SPI 6P接口:1个
- 复位RST 2P接口:1个
- 电池BAT、5V、3V3供电输出2P接口:各2个
- 产品尺寸:31×38 mm
- 重量:8 g
接口说明
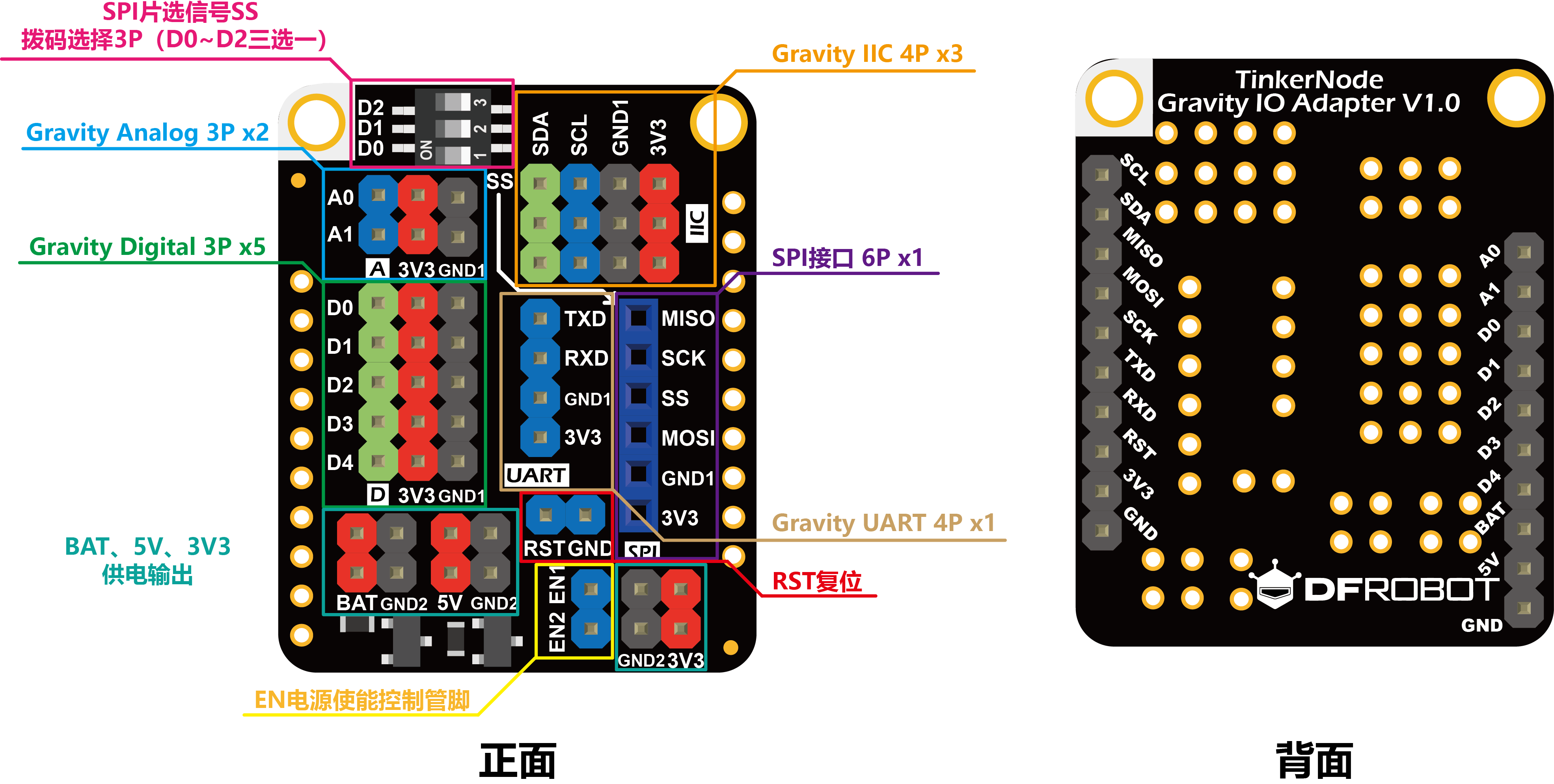
连接指南
- 如下图将模块左上角带有白色丝印的一角与底部的主控板对齐,插入即可。

使用教程
- SPI接口使用排母,片选信号SS可通过拨码开关连接到D0~D2中的任意一个。

- SPI接口可直接连接microSD/TF模块,当开发板自身存储空间不足时,外接microSD/TF模块可提供海量数据的存储需要。除了将模块插入SPI接口,需要注意将拨码开关的其中一路拨到ON,以将D0~D2中任意一个IO连接到片选SS,并在代码中对管脚映射作相应修改。

- 如下图,开发板的供电被划分为两块(橘蓝两色框选的区域),并分别通过EN1和EN2进行控制。当EN1和EN2悬空时(内部上拉),GND1和GND2与开发板的系统地GND相连,正常供电。当EN1或EN2通过数字管脚(D0~D4)被拉至低电平时(需要杜邦线连接),GND1或GND2与开发板的系统地GND断开,相对应的供电被断开。通过这种方式,可以将连接到扩展板的外设供电关断,实现外设的间歇工作,以达到低功耗。

应用实例
通过SPI接口读写TF卡
- 连接:将TF卡插入microSD/TF模块,microSD/TF模块如上图插入到扩展板的SPI接口,并将标有D0一路的拨码开关拨到ON位置,并将扩展板插入TinkerNode主板中。
- 测试代码:将如下代码上传至TinkerNode主板中,进行TF卡的读写测试。
#include "FS.h"
#include "SD.h"
#include "SPI.h"
#define SS D0 // For TinkerNode Series, SS can be one of D0~D2
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
Serial.printf("Listing directory: %s\n", dirname);
File root = fs.open(dirname);
if(!root){
Serial.println("Failed to open directory");
return;
}
if(!root.isDirectory()){
Serial.println("Not a directory");
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
Serial.print(" DIR : ");
Serial.println(file.name());
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
Serial.print(" FILE: ");
Serial.print(file.name());
Serial.print(" SIZE: ");
Serial.println(file.size());
}
file = root.openNextFile();
}
}
void createDir(fs::FS &fs, const char * path){
Serial.printf("Creating Dir: %s\n", path);
if(fs.mkdir(path)){
Serial.println("Dir created");
} else {
Serial.println("mkdir failed");
}
}
void removeDir(fs::FS &fs, const char * path){
Serial.printf("Removing Dir: %s\n", path);
if(fs.rmdir(path)){
Serial.println("Dir removed");
} else {
Serial.println("rmdir failed");
}
}
void readFile(fs::FS &fs, const char * path){
Serial.printf("Reading file: %s\n", path);
File file = fs.open(path);
if(!file){
Serial.println("Failed to open file for reading");
return;
}
Serial.print("Read from file: ");
while(file.available()){
Serial.write(file.read());
}
file.close();
}
void writeFile(fs::FS &fs, const char * path, const char * message){
Serial.printf("Writing file: %s\n", path);
File file = fs.open(path, FILE_WRITE);
if(!file){
Serial.println("Failed to open file for writing");
return;
}
if(file.print(message)){
Serial.println("File written");
} else {
Serial.println("Write failed");
}
file.close();
}
void appendFile(fs::FS &fs, const char * path, const char * message){
Serial.printf("Appending to file: %s\n", path);
File file = fs.open(path, FILE_APPEND);
if(!file){
Serial.println("Failed to open file for appending");
return;
}
if(file.print(message)){
Serial.println("Message appended");
} else {
Serial.println("Append failed");
}
file.close();
}
void renameFile(fs::FS &fs, const char * path1, const char * path2){
Serial.printf("Renaming file %s to %s\n", path1, path2);
if (fs.rename(path1, path2)) {
Serial.println("File renamed");
} else {
Serial.println("Rename failed");
}
}
void deleteFile(fs::FS &fs, const char * path){
Serial.printf("Deleting file: %s\n", path);
if(fs.remove(path)){
Serial.println("File deleted");
} else {
Serial.println("Delete failed");
}
}
void testFileIO(fs::FS &fs, const char * path){
File file = fs.open(path);
static uint8_t buf[512];
size_t len = 0;
uint32_t start = millis();
uint32_t end = start;
if(file){
len = file.size();
size_t flen = len;
start = millis();
while(len){
size_t toRead = len;
if(toRead > 512){
toRead = 512;
}
file.read(buf, toRead);
len -= toRead;
}
end = millis() - start;
Serial.printf("%u bytes read for %u ms\n", flen, end);
file.close();
} else {
Serial.println("Failed to open file for reading");
}
file = fs.open(path, FILE_WRITE);
if(!file){
Serial.println("Failed to open file for writing");
return;
}
size_t i;
start = millis();
for(i=0; i<2048; i++){
file.write(buf, 512);
}
end = millis() - start;
Serial.printf("%u bytes written for %u ms\n", 2048 * 512, end);
file.close();
}
void setup(){
Serial.begin(115200);
if(!SD.begin(SS)){
Serial.println("Card Mount Failed");
return;
}
uint8_t cardType = SD.cardType();
if(cardType == CARD_NONE){
Serial.println("No SD card attached");
return;
}
Serial.print("SD Card Type: ");
if(cardType == CARD_MMC){
Serial.println("MMC");
} else if(cardType == CARD_SD){
Serial.println("SDSC");
} else if(cardType == CARD_SDHC){
Serial.println("SDHC");
} else {
Serial.println("UNKNOWN");
}
uint64_t cardSize = SD.cardSize() / (1024 * 1024);
Serial.printf("SD Card Size: %lluMB\n", cardSize);
listDir(SD, "/", 0);
createDir(SD, "/mydir");
listDir(SD, "/", 0);
removeDir(SD, "/mydir");
listDir(SD, "/", 2);
writeFile(SD, "/hello.txt", "Hello ");
appendFile(SD, "/hello.txt", "World!\n");
readFile(SD, "/hello.txt");
deleteFile(SD, "/foo.txt");
renameFile(SD, "/hello.txt", "/foo.txt");
readFile(SD, "/foo.txt");
testFileIO(SD, "/test.txt");
Serial.printf("Total space: %lluMB\n", SD.totalBytes() / (1024 * 1024));
Serial.printf("Used space: %lluMB\n", SD.usedBytes() / (1024 * 1024));
}
void loop(){
}- 结果:如读写卡测试正常,将会打印类似于如下TF卡的类型和存储空间等测试信息。

使用电源控制管脚实现系统的超低功耗
.png")
- 在使用Gravity: 模拟pH计V2作户外水质监控时,pH计实际仅在需要测量时短暂通电,然后关闭即可。假如根据水质监测的要求,需要每隔10分钟测量一次pH值,每次系统唤醒->测量->数据记录->休眠花费1s,将传感器仅在需要时通电,置于间歇的工作状态,可极大降低系统功耗。在这里pH计功耗约为20mW,通过间歇工作可将其平均功耗降到原来的1/600,即33uW,并随着测量间隔变长而进一步降低。D0可通过杜邦线连接到EN1,通过将其拉低来关断pH计的电源。
pinMode(D0,OUTPUT); //将D0配置为输出
digitalWrite(D0,HIGH); //将D0输出高电平,打开pH计的供电
//读取pH计值,并将数据记录到FLASH或TF卡中
digitalWrite(D0,LOW); //将D0输出低电平,关断pH计的供电常见问题
'''Q1. '''为什么5V端口测出不是5V电压? |
- '''A. '''5V端口供电由主板提供,由于主控板通常不带有升压功能,当主板由太阳能或者电池供电时,5V端口悬空,无法对外供电;只有当主板由外部6V-24V或者USB供电时,5V端口才有5V电压输出对外供电。详情参考DFR0530 TinkerNode NB-IoT 物联网开发板。
更多问题及有趣的应用,可以 访问论坛 进行查阅或发帖。 |
